Область техники, к которой относится изобретение
Изобретение относится к дисководу, способу его изготовления и контроллеру дисковода.
Предпосылки создания изобретения
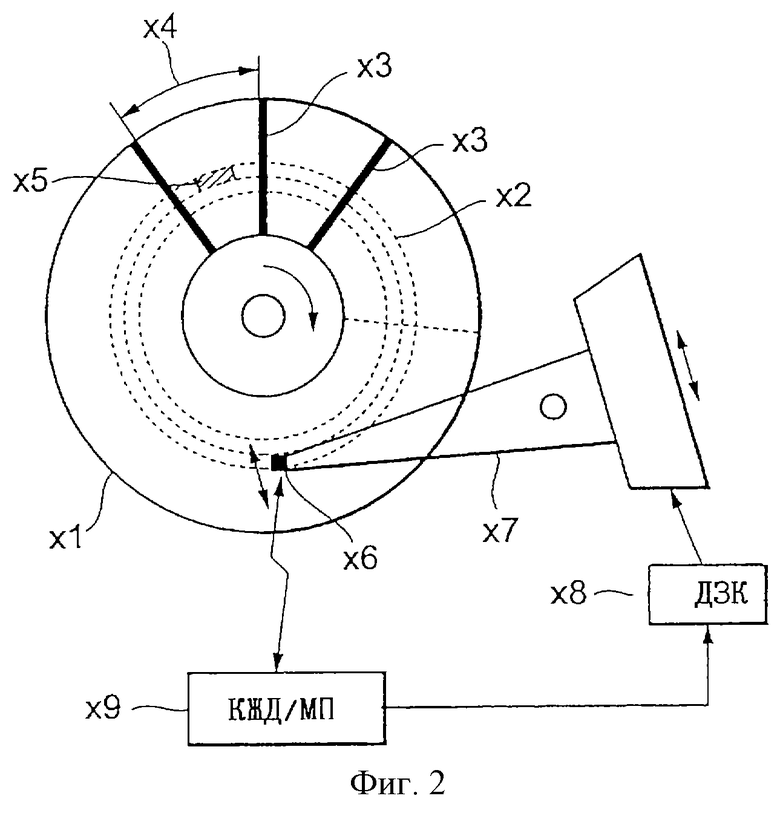
Как показано на фиг.2, на рабочей поверхности магнитного диска X1, используемого в качестве носителя информации в дисководе, сформированы расположенные концентрично друг относительно друга кольцевые дорожки Х2 записи. Кроме того, на рабочей поверхности диска предусмотрены расположенные с заданным угловым шагом (например, 360o/80 или 45o) служебные участки Х3, на которых записывается служебный сектор, включающий набор служебных данных, идентификационный номер и т.д. Кроме того, на рабочей поверхности диска между соседними служебными участками Х3 имеется также информационный участок Х4, на котором записывается сектор Х5 данных. Помимо этого в некоторых дисководах такой информационный участок Х4 сегментируется в радиальном направлении магнитного диска X1 на несколько зон. Для каждой такой зоны данных число секторов Х5 данных оптимизируется в соответствии с радиальным положением зоны, что позволяет записывать данные в эти зоны с более равномерной плотностью.
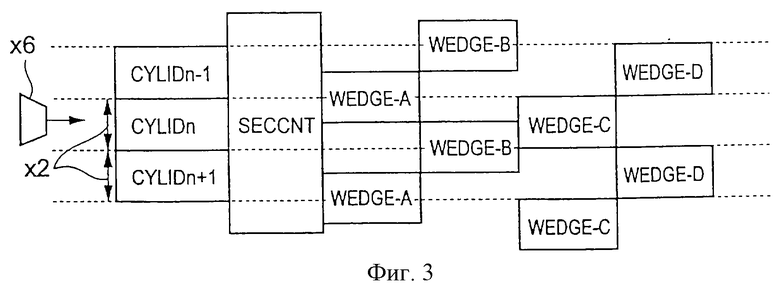
Кроме того, как показано на фиг.3, на служебном участке Х3 записывается набор служебных данных (который состоит из клиньев WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D) и идентификационный номер цилиндра (CYLID). Когда головка Х6 чтения-записи проходит над набором служебных данных и идентификационным номером, выходной сигнал от этого набора служебных данных и идентификационного номера, воспроизводимый головкой Х6 чтения-записи, поступает в контроллер жесткого диска/микропроцессор (КЖД/МП) Х9. При получении этого воспроизводимого выходного сигнала КЖД/МП Х9 на основании этого сигнала вычисляет текущее положение головки Х6 чтения-записи.
При указании определенного сектора Х5 данных и при поступлении команды записи/воспроизведения в таком дисководе происходит управление позиционированием, заключающееся в перемещении головки Х6 чтения-записи к требуемой дорожке, на которой записан заданный сектор данных. По достижении головкой Х6 чтения-записи целевой дорожки происходит управление отслеживанием дорожки, заключающееся в регулировании положения головки Х6 чтения-записи, чтобы последняя отслеживала целевую дорожку. Таким путем выполняется запись/воспроизведение заданного сектора диска.
КЖД/МП Х9 на основании воспроизводимого выходного сигнала от вышеуказанного набора служебных данных вычисляет погрешность (погрешность позиционирования), характеризующую отклонение между целевой дорожкой и текущим положением головки Х6 чтения-записи. Кроме того, КЖД/МП Х9 осуществляет управление в соответствии с этой погрешностью позиционирования.
При указании целевой дорожки КЖД/МП Х9 сначала управляет ускоренным перемещением головки Х6 чтения-записи к целевому сектору данных. Затем, когда скорость перемещения головки Х6 чтения-записи достигнет заданного максимального значения, КЖД/МП Х9 управляет перемещением головки Х6 чтения-записи с постоянной скоростью. В завершение, когда головка Х6 чтения-записи окажется вблизи целевого сектора данных, КЖД/МП Х9 управляет замедлением головки Х6 чтения-записи (управление позиционированием).
Когда головка Х6 чтения-записи достигнет целевой дорожки, КЖД/МП Х9 переключается в режим управления отслеживанием дорожки, обеспечивая отслеживание головкой Х6 чтения-записи целевой дорожки. Переключение между этими режимами управления осуществляется путем изменения арифметических параметров, используемых для вычисления данных, используемых для сервоуправления.
В режимах управления позиционированием и управления отслеживанием вычисляются данные, которые используются для сервоуправления двигателем со звуковой катушкой (ДЗК) Х8, который перемещает рычаг Х7 головки. Эти используемые для сервоуправления данные вычисляются КЖД/МП Х9 на основании погрешности позиционирования.
Вычисление используемых для сервоуправления данных выполняется, в частности, на основании следующего уравнения (1), в которое входит интегральный параметр I, обеспечивающий стабильность управления:
U(t)=K1X(t)+K2•[X(t)-X(t-1)]+K3•U(t-1)+K4•U(t-2)+K5•I+C. (1)
Поскольку в последнее время осуществлять подобное сервоуправление необходимо с высокой скоростью и с высокой степенью точности (динамический диапазон), при этом повышаются также требования к точности вычисления вышеуказанного интегрального параметра. В результате могут возникать ситуации, когда требуемая точность вычисления интегрального параметра будет превышать точность вычислений, выполняемых арифметическими устройствами управления, предусмотренными в КЖД/МП Х9.
Если необходимая точность вычисления интегрального параметра превысит точность вычислений, выполняемых арифметическими устройствами управления, то данные, используемые для сервоуправления, невозможно будет вычислять с необходимой точностью. В результате станет невозможным отслеживать целевую дорожку и, как следствие, станет невозможным записывать на диск данные и воспроизводить (считывать) с него данные.
Кроме того, если требуемая точность вычисления интегрального параметра превысит точность вычислений, выполняемых арифметическими устройствами управления, в процессе заводских испытаний дисковода, то дисковод будет признан дефектным, что приведет к снижению выхода годной продукции.
Помимо этого с целью обеспечить требуемую точность вычислений, выполняемых арифметическим устройством, предусмотренным в КЖД/МП Х9, можно также повысить за счет добавления или использования дополнительного арифметического устройства, например цифрового процессора сигналов (ЦПС). Однако несмотря на то, что такой переход, например, с 16-разрядного на 32-разрядное устройство и позволяет повысить точность вычислений, выполняемых предусмотренным в КЖД/МП Х9 арифметическим устройством или выполняемых ЦПС, наличие подобного дополнительного оборудования приводит к существенному удорожанию дисковода.
Настоящее изобретение направлено на решение именно этих проблем. Таким образом, в основу настоящего изобретения была положена задача разработать дисковод, способ его изготовления и контроллер дисковода, которые позволили бы повысить выход годной продукции (до более чем приемлемого уровня).
Краткое описание изобретения
Для решения вышеуказанных проблем в изобретении предлагается дисковод, который отличается наличием дискового носителя информации со служебным участком, на котором записан служебный сектор, и информационным участком, на котором записан сектор данных, устройства записи/воспроизведения, предназначенного для воспроизведения служебного сектора дискового носителя информации и для записи или воспроизведения сектора данных, приводного устройства для изменения положения устройства записи/воспроизведения, устройства определения положения, предназначенного для получения информации о положении устройства записи/воспроизведения на основании выходного сигнала от служебного сектора, воспроизводимого устройством записи/воспроизведения, запоминающего устройства, предназначенного для хранения интегрального параметра, характеризующего положение на дисковом носителе информации, арифметического устройства, предназначенного для вычисления данных для управления приводным устройством на основании информации о положении, выявленной устройством определения положения, и интегрального параметра, соответствующего этой информации о положении, и корректирующего устройства, предназначенного для задания интегрального параметра в соответствии с точностью вычислений, выполняемых арифметическим устройством, и для корректировки вычислений, выполняемых этим арифметическим устройством.
Кроме того, предлагаемый дисковод может также иметь устройство выявления ошибки позиционирования, предназначенное для выявления неудачного завершения операции позиционирования, заключающейся в перемещении устройства записи/воспроизведения в требуемое положение в соответствии с результатом вычислений, выполняемых арифметическим устройством, и устройство сброса, предназначенное для возврата интегрального параметра в исходное состояние в том случае, когда устройство выявления ошибки позиционирования установит неудачное выполнение операции позиционирования.
В изобретении предлагается также осуществляемый в процессе заводских испытаний способ изготовления дисковода, который отличается тем, что устройство записи/воспроизведения перемещают во все радиальные положения, которые оно может занимать на дисковом носителе информации и которые используются при записи, после чего в каждом радиальном положении вычисляют интегральный параметр и затем, если значение интегрального параметра превышает точность вычислений, выполняемых арифметическим устройством, интегральный параметр корректируют, настраивая его на значение, лежащее в пределах точности вычислений, выполняемых арифметическим устройством.
Краткое описание чертежей
На прилагаемых к описанию чертежах показано:
на фиг.1 - принципиальная схема предлагаемого в изобретении дисковода,
на фиг.2 - схематичное изображение конструкции обычного дисковода,
на фиг.3 - схема формата служебного сектора, используемого в дисководе,
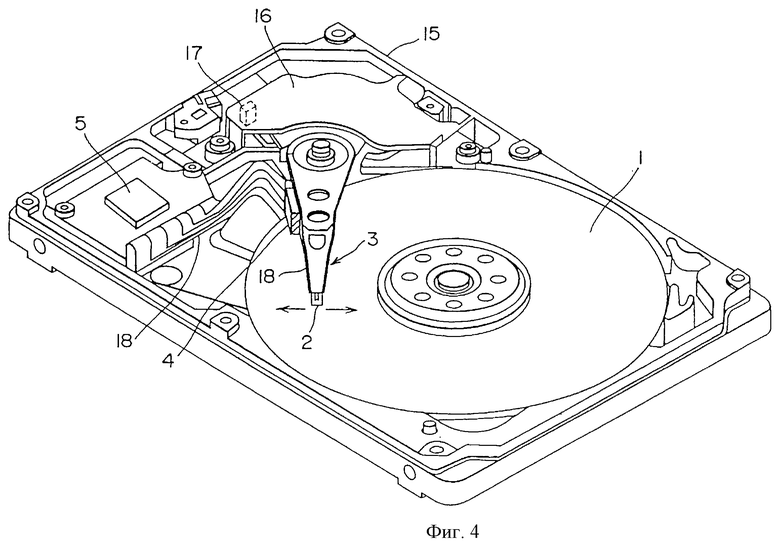
на фиг.4 - изображение в перспективе предлагаемого в изобретении дисковода,
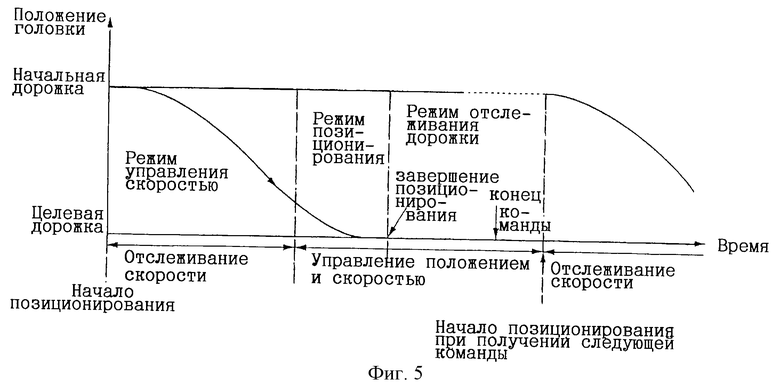
на фиг. 5 - диаграмма, на которой показаны рабочие режимы дисковода при выполнении операции позиционирования,
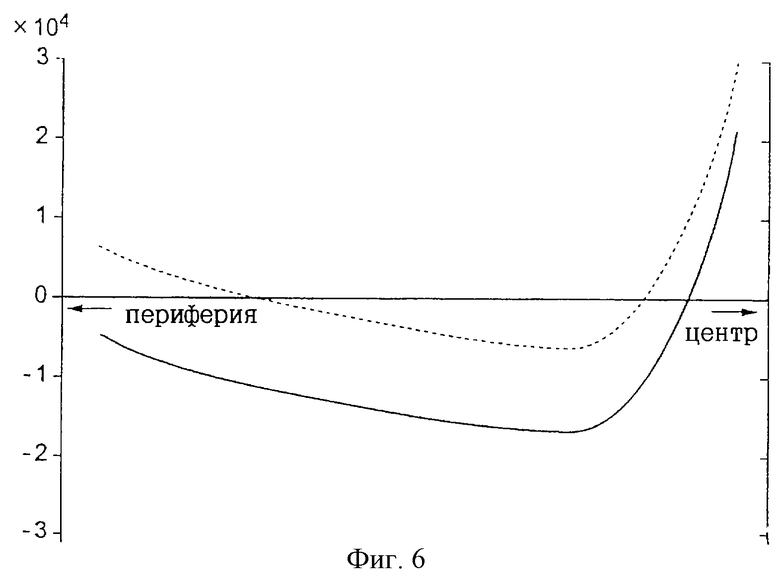
на фиг. 6 - график, на котором показан пример характеристики интегрального параметра, предназначенного для вычисления данных, используемых для сервоуправления дисководом,
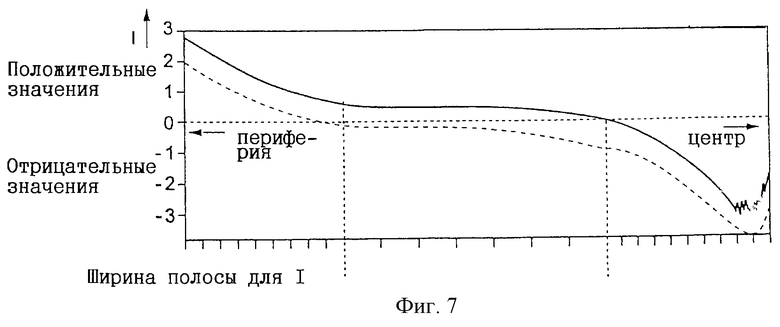
на фиг. 7 - график, на котором показан другой пример характеристики интегрального параметра, и
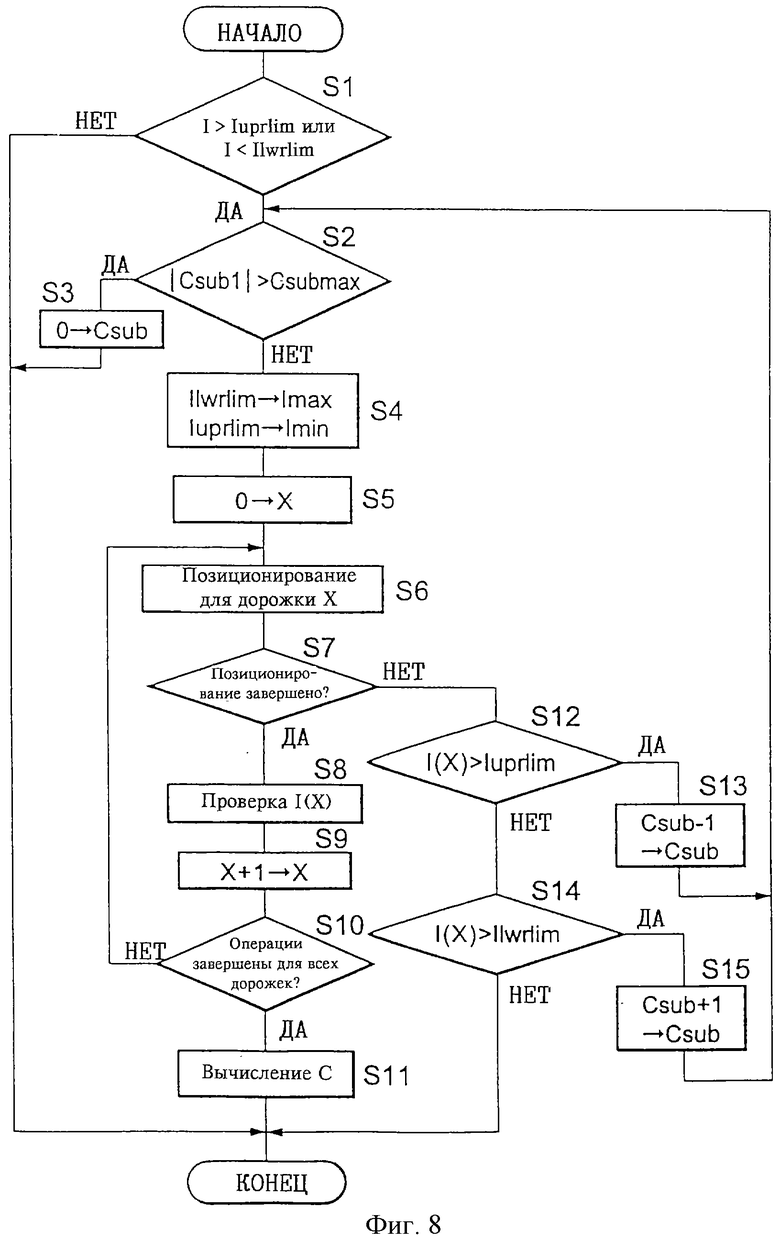
на фиг.8 - блок-схема процесса настройки интегрального параметра.
Предпочтительный вариант осуществления изобретения
На фиг. 1 изображена принципиальная схема дисковода, выполненного в соответствии с изобретением.
В этом дисководе имеются магнитный диск 1, головка 2 чтения-записи, предназначенная для записи информации на магнитный диски 1 и воспроизведения (считывания) с него информации, рычаг 3, который несет головку 2 чтения-записи, электронная схема 4 рычага (ЭСР), расположенная рядом с головкой 2 чтения-записи и предназначенная для подачи записываемого сигнала на головку 2 чтения-записи и для приема (усиления) выходного сигнала головки 2 чтения-записи, канальный блок 5, предназначенный для извлечения и преобразования (кодирования) служебного набора данных и идентификационного номера цилиндра (CYLID) на основании выходного сигнала, поступающего от ЭСР 4, интегральная схема (ИС) 10 управления, осуществляющая сервоуправление и управляющая процессом записи информации на магнитный диск 1 и воспроизведения информации с него, и приводной узел 6 ДЗК, управляющий так называемым двигателем со звуковой катушкой (ДЗК), приводящим в движение рычаг 3 головки.
В состав ИС 10 управления входит микропроцессор (МП) 12, управляющий работой всей системы, постоянное запоминающее устройство (ПЗУ) 13, в котором хранятся управляющие программы и иные данные, запоминающее устройство с произвольной выборкой (ЗУПВ) 14, используемое для хранения управляющей информации, записываемых данных и воспроизводимых данных, а также контроллер 20 жесткого диска (КЖД), предназначенный для формирования сигнала сервоуправления. МП 12, ПЗУ 13, ЗУПВ 14 и КЖД 20 соединены шиной 21. ИС 10 управления может быть изготовлена, например, в виде одного полупроводникового элемента или прибора.
На фиг. 4 в перспективе показано конкретное устройство описанного выше дисковода.
Магнитный диск 1 соединен с монтажной панелью 15 с возможностью свободного вращения. Рычаг 3 головки, перемещающий башмак-ползун с закрепленной на нем головкой 2 чтения-записи и приводимый в движение ДЗК 16, установлен таким образом, чтобы перемещать головку 2 чтения-записи примерно в радиальном направлении магнитного диска 1.
Кроме того, рычаг 3 головки имеет такую конструкцию, чтобы в нерабочем состоянии (состоянии покоя) вращение головки 2 чтения-записи ограничивалось магнитом 17, расположенным напротив так называемой зоны посадки головки при остановке диска, имеющейся на внутренней окружности магнитного диска 1.
С целью снижения уровня шума вышеуказанная ЭСР 4 закреплена на боковой поверхности рычага 3 головки 2 чтения-записи и соединена с ней и канальным блоком 5 гибким проводом 18.
Кроме того, вышеописанная ИС 10 управления установлена на плате управления (не показана), расположенной вне монтажной панели 15. ИС 10 управления проходит сквозь монтажную панель 15 и подсоединена гибким кабелем 18.
На рабочей поверхности магнитного диска 1, показанного также на фиг.2, образованы расположенные концентрично друг относительно друга кольцевые дорожки Х2 заданной ширины. Кроме того, на рабочей поверхности диска предусмотрены расположенные с некоторым заданным угловым шагом (например, 360o/80 или 45o) служебные участки, на которых записан набор служебных данных Х3. На каждой дорожке Х2 между соседними служебными участками Х3 имеется также информационный участок Х4, на котором записывается сектор Х5 данных. Следует отметить, что равномерность плотности записи можно обеспечить путем разбиения (сегментации) информационного участка Х4 в радиальном направлении на несколько зон и записи оптимального числа секторов Х5 данных в каждой такой зоне в соответствии с радиальным положением той или иной зоны.
В каждый служебный сектор Х3, как показано на фиг.3, записываются после их кодирования с помощью соответствующих методов кодирования, пригодных для соответствующих типов записи/воспроизведения, идентификационный номер цилиндра (CYLID), указывающий номер дорожки, номер физического сектора (SECCNT), указывающий номер набора служебных данных, пакетная последовательность клиньев WEDGE-A, WEDGE-B, WEDGE-С и WEDGE-D, предназначенная для управления операциями отслеживания и т.д.
Идентификационный номер цилиндра (CYLID) записывается с использованием специальной системы представления информации, называемой кодом Грея (циклическим двоичным кодом). Код Грея отличается от обычной последовательности двоичных чисел. В коде Грея каждое число отличается от предшествующего ему только в одном разряде, т.е. при каждом увеличении значения на 1 в коде Грея изменяется только 1 двоичный разряд. При использовании такой системы представления информации независимо от того, переместится ли головка чтения-записи между CYLIDn и CYLIDn-1, всегда будет получено одно из значений. Кроме того, номер физического сектора (SECCNT) является номером, обозначающим каждый набор служебных данных. Поскольку этот номер не зависит от положения в радиальном направлении, он записывается с использованием обычной последовательности двоичных чисел. Канальный блок 5 воспроизводит значения CYLID и SECCNT, декодируя их с помощью методов, соответствующих методам, использованным для кодирования, и направляет полученные значения CYLID и SECCNT в ИС 10 управления.
Пакетная последовательность клиньев WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D записывается с целью определения точного местоположения на дорожке, устранения вышеописанной неопределенности значения CYLID, а также для определения того, на какой из соседних дорожек находится головка чтения-записи. Шаг этой пакетной последовательности равен половине ширины дорожки, при этом две дорожки составляют 1 период. Таким образом, данные WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D в пакетной последовательности размещаются и записываются таким образом, чтобы их радиальные положения отличались друг от друга на половину ширины дорожки.
Когда головка 2 чтения-записи проходит над дорожками, имеющими вышеописанную структуру, в воспроизводимом выходном сигнале головки данные CYLID, SECCNT, WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D будут присутствовать в указанном порядке. Воспроизводимые уровни для WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D изменяются в зависимости от положения головки 2 чтения-записи.
В канальном блоке 5 имеется аналогово-цифровой преобразователь (АЦП) 5а, который последовательно преобразует воспроизводимые аналоговые уровни сигналов WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D в цифровые сигналы и выдает их в виде данных А, В, С и D, характеризующих соответствующие уровни воспроизведения.
Операции сервоуправления, осуществляемого КЖД 20, состоят, например, в генерировании управляющего сигнала для канального блока 5, приеме наборов служебных данных, формировании идентификационного номера CYLID на основании воспроизводимых значений кода Грея и т.д. КЖД 20 также управляет приводом с использованием для этой цели управляющих сигналов от МП 12, определяет, как описано выше, текущее положение головки 2 чтения-записи на основании данных А, В, С и D, характеризующих относительные уровни воспроизведения клиньев WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D, поступающих от АЦП 5а, осуществляет позиционирование, заключающееся в подводе головки 2 чтения-записи к целевой дорожке, управляет отслеживанием дорожки, заключающимся в отслеживании головкой 2 чтения-записи целевой дорожки, и т.д.
МП 12 на основании выполняемых им управляющих программ, хранящихся, например, в ПЗУ 13, отрабатывает команды, поступающие от внешних устройств, управляет вводом-выводом данных, выполняет при возникновении исключительных ситуаций различные операции, которые не могут быть обработаны КЖД 20, и т.д.
Ниже более подробно рассмотрена работа предлагаемого дисковода.
При поступлении от внешнего устройства сигнала с логическим адресом блока (ЛАБ) и при поступлении команды на выполнение записи или чтения в дисководе вышеописанной конструкции на основании этого ЛАБ определяется целевая дорожка, целевой сектор и т.д.
После определения целевой дорожки КЖД 20, как показано на фиг.5, сначала управляет ускоренным перемещением головки 2 чтения-записи к целевому сектору. Затем, когда скорость движения головки 2 чтения-записи достигнет заданного максимального значения, КЖД 20 управляет перемещением головки 2 чтения-записи с постоянной скоростью. (Режим выполнения описанной последовательности операций по управлению скоростью перемещения головки ниже называется режимом управления скоростью). После этого, когда головка 2 чтения-записи приблизится к целевой дорожке, КЖД 20 управляет замедлением головки 2 чтения-записи. (Режим такого управления ниже называется режимом позиционирования). Затем, когда головка 2 чтения-записи достигнет целевой дорожки, КЖД 20 управляет отслеживанием головкой 2 чтения-записи целевой дорожки. (Режим такого управления ниже называется режимом отслеживания дорожки).
После получения от канального блока 5 идентификационного номера CYLID и данных А, В, С и D, характеризующих уровни воспроизведения клиньев WEDGE-A, WEDGE-B, WEDGE-C и WEDGE-D, КЖД 20 определяет текущее положение головки 2 чтения-записи, а также формирует сигнал погрешности позиционирования (СПП), характеризующий отклонение текущего положения головки 2 чтения-записи от целевой дорожки, которая была определена в ходе выполнения описанных выше операций.
КЖД 20 на основании величины СПП выбирает один из вышеуказанных режимов и в соответствии с выбранным режимом вычисляет данные для сервоуправления.
Указанные данные для сервоуправления (U(t)) вычисляются, например, в соответствии со следующим уравнением (1):
U(t)=K1•X(t)+K2•[X(t)-X(t-1)]+K3•U(t-1)+K4•U(t-2)+K5•I+C, (1)
где параметр X(t) в первом члене правой части уравнения представляет собой расстояние до целевой дорожки, т.е. представляет собой величину вышеуказанного СПП, а параметр X(t)-X(t-1) во втором члене в правой части уравнения представляет собой изменение СПП во времени, т.е. скорость перемещения головки 2 чтения-записи. Кроме того, параметр I в пятом члене в правой части уравнения является интегральным параметром [т.е. суммой X(t) (интегрированным значением, если X(t) является целочисленной переменной)]. Параметр С в шестом члене правой части уравнения является константой, а К1, К2, К3, К4 и К5 являются коэффициентами обратной связи, которые определяются с учетом коэффициента усиления системы управления, устойчивости и т.д.
Кроме того, поскольку X(t) в установившемся режиме принимает нулевое значение, уравнение (1) принимает следующий вид:
U(t)=K3•U+K4•U+K5•I+C.
Помимо этого
(1-K3-K4)•U=K5•I+C,
U=[K5/(1-K3-K4)]•I+C'. (2)
Кроме того, интегральный параметр I является параметром, используемым для регулирования постоянного тока смещения, подаваемого в ДЗК для удержания головки 2 чтения-записи в определенном положении над некоторой дорожкой. На стадии заводских испытаний для каждого дисковода точно измеряется и определяется оптимальное значение этого параметра при принудительном отслеживании головкой 2 чтения-записи каждой дорожки записи. На фиг.6 представлен пример экспериментального измеренного параметра I.
Левая сторона графика, показанного на фиг.6, относится к кольцевым дорожкам, расположенным ближе к периферии магнитного диска 1, а правая сторона - к кольцевым дорожкам, расположенным ближе к центру магнитного диска. Изменение этого интегрального параметра I обусловлено, например, влиянием вышеописанного магнита 17, упругостью гибкого кабеля 18, направлением потока воздуха, обдувающего башмак-ползун головки, и иных факторов. По этим причинам значение интегрального параметра I варьируется для дисководов, различающихся количеством дисков, количеством головок чтения-записи и иными характеристиками. Кроме того, даже у однотипных дисководов значение интегрального параметра I будет варьироваться от одного дисковода к другому из-за различий в характеристиках используемых в их конструкции компонентов. Так, например, в дисководах других конструкций встречаются ситуации, когда значение I становится отрицательным в центральной кольцевой части магнитного диска 1, как это показано на фиг.7.
Кроме того, если значение интегрального параметра I превышает точность вычислений, выполняемых КЖД, то регулировать постоянный ток смещения, подаваемый в ДЗК, станет невозможным, и поэтому невозможно будет более управлять отслеживанием головкой 2 записи-чтения целевой дорожки.
Таким образом, значение интегрального параметра I ограничивается точностью вычислений, выполняемых КЖД. Так, например, если точность вычислений составляет 16 двоичных разрядов (бит), то интегральный параметр I может изменяться в пределах от 8000h (где h представляет собой шестнадцатиричное число) до 7FFFh (от -32768 до 32767). Кроме того, если учитывать также определенные ограничения, накладываемые на процесс настройки дисковода, то диапазон изменения интегрального параметра I в этом случае ограничивается пределами от -25000 до 25000.
По этой причине при изменении интегрального параметра I в соответствии, например, с характеристикой, показанной сплошной линией на фиг.6, значение I для всех дорожек будет укладываться в динамический диапазон вычислений, выполняемых КЖД 20. В результате для всех дорожек можно будет настроить постоянный ток смещения, подаваемого в ДЗК. Если же в отличие от этого использовать, например, характеристику, показанную на фиг.6 прерывистой линией, то значение I в расположенной ближе к центру магнитного диска 1 части превысит верхний диапазон выполняемых КЖД 20 вычислений, и по этой причине настройка постоянного тока смещения для дорожек, расположенных ближе к центру диска, станет невозможной. Такой дисковод будет рассматриваться как дефектный, что приведет к снижению выхода готовой продукции.
Если же в предлагаемом в изобретении дисководе значение интегрального параметра I превысит заданный динамический диапазон, как в случае показанной на фиг.6 прерывистой линией характеристики, то значение этого интегрального параметра I будет смещено на некоторую величину, благодаря чему оно не будет выходить за пределы, в которых его изменение является допустимым. Кроме того, даже простое смещение значения I на некоторую величину приведет к изменению данных для сервоуправления, вычисленных на основании уравнения (2). По этой причине настройка значения интегрального параметра I осуществляется с использованием константы С.
Если помимо этого значение интегрального параметра I находится вблизи границы вышеупомянутого динамического диапазона, в пределах которого может изменяться этот интегральный параметр I, то необходимо также учитывать вероятность выхода его значения за пределы указанного диапазона вследствие внешних или иных воздействий. По этой причине целесообразно, чтобы значение интегрального параметра I находилось в центральной части диапазона, в пределах которого он может изменяться. Более предпочтительно при этом обеспечить наличие некоторого запаса.
Кроме того, для учета точности вычислений в заданном диапазоне возможно также изменение значений коэффициентов (К3, К4 и К5) в вышеприведенном уравнении (2), однако изменение этих коэффициентов случайным образом, поскольку их обычно определяют с таким расчетом, чтобы получить оптимальную характеристику сервоуправления, приведет к ухудшению последней.
Таким образом, в предлагаемом дисководе для интегрального параметра I используется смещение, для чего задается константа С, что позволяет предотвратить ухудшение характеристики сервоуправления.
Для определения вышеуказанной константы С при проведении заводских испытаний для всех дорожек рассчитывается вышеописанная характеристика изменения интегрального параметра I, аналогичная показанной на фиг.6, и вычисляется такое значение С, при котором значения I для всех дорожек будут укладываться в пределы заданного диапазона.
Конкретный процесс определения значений интегрального параметра I и константы С проиллюстрирован на блок-схеме, показанной на фиг.8.
Сначала во время заводских испытаний, когда принудительно обеспечивают отслеживание головкой чтения-записи каждой дорожки, для каждого дисковода измеряют фактическое значение интегрального параметра I.
Затем выполнение процесса определения значений интегрального параметра I и константы С начинается с шага S1.
Следует отметить, что для интегрального параметра I сначала предварительно задают минимальное значение, обозначаемое как Ilwrilm (8000h для вышеописанного случая), и максимальное значение, обозначаемое как Iuprlim (7FFFh для вышеописанного случая). Кроме того, для исходного состояния задают нулевые значения вышеописанной константы С и переменной Csub.
Сначала на шаге S1 определяется, выходит ли значение интегрального параметра I для любой дорожки за пределы диапазона, в котором он может изменяться.
Если параметр I выходит за пределы этого диапазона, то происходит переход к шагу S2, поскольку в этом случае необходима вышеупомянутая настройка значений интегрального параметра I и константы С. Если же значение параметра I не выходит за пределы допустимого диапазона, то на этом весь процесс завершается, поскольку значения интегрального параметра I для всех дорожек не выходят за пределы диапазона, в котором может изменяться интегральный параметр I.
На шаге S2 определяется, превышает ли абсолютное значение переменной Csub максимальное значение Csubmax, которое может принимать переменная Csub. В том случае, если эта переменная превышает максимальное значение Csubmax, происходит переход к шагу S3, поскольку интегральный параметр I невозможно настроить таким образом, чтобы он находился в предварительно заданном диапазоне. На шаге S3 переменная Csub приравнивается 0 и на этом весь процесс завершается.
Если же абсолютное значение переменной Csub окажется меньше максимального значения Csubmax (верхний предел числа повторных попыток), происходит переход к шагу S4. На шаге S4 переменной Imax, предназначенной для выявления максимального значения интегрального параметра I, присваивается минимальное значение Ilwrlim, которое может принимать интегральный параметр I, а переменной Imin, предназначенной для выявления минимального значения интегрального параметра I, присваивается максимальное значение Iuprlim, которое может принимать интегральный параметр I. После этого происходит переход к шагу S5.
На шаге S5 переменная X, предназначенная для подсчета дорожек, обнуляется, после чего происходит переход к шагу S6. На шаге S6 головка чтения-записи перемещается к дорожке Х (эта операция называется операцией позиционирования), после чего происходит переход к шагу S7.
На шаге S7 определяется, нормально ли завершилась операция позиционирования. Если позиционирование завершилось нормально, то происходит переход к шагу S8. На шаге S8 проверяется текущее значение I(Х). Если при проведении такой проверки окажется, что значение I(Х) больше переменной Imax, которая характеризует максимальное значение интегрального параметра I на данный момент времени, то переменной Imax присваивается значение I(Х). С другой стороны, если значение I(Х) оказывается меньше переменной Imin, которая характеризует минимальное значение интегрального параметра I на данный момент времени, то переменной Imin присваивается значение I(X). По завершении вышеописанной операции проверки происходит переход к шагу S9.
На шаге S9 значение переменной Х увеличивается на 1, после чего происходит переход к шагу S10. На шаге S10 определяется, закончилась ли для всех дорожек процедура выполнения операций, предусмотренных на шагах S6-S9. Если эта процедура еще не закончилась для всех дорожек, то происходит возврат к шагу S6, начиная с которого повторяются все операции, предусмотренные на шагах S6-S9. При этом операция позиционирования последовательно выполняется для всех дорожек и определяется, нормально ли выполняется позиционирование. Если же на шаге S10 будет установлено, что указанная процедура завершена для всех дорожек, то происходит переход к шагу S11. На шаге S11 вычисляется значение константы С, и на этом весь процесс завершается. Таким путем интегральный параметр I настраивается на значения, которые лежат в допустимом диапазоне их изменения, и в соответствии с откорректированным значением интегрального параметра I определяется значение константы С.
Если же на шаге S7 будет установлено, что операция позиционирования не завершена нормально, то происходит переход к шагу S12. На шаге S12 определяется, не превышает ли значение I(Х) максимального значения Iuprlim, которое является допустимым для значений I(X). Если значение I(X) превышает максимальное значение, то происходит переход к шагу S13. На шаге S13 из переменной Csub вычитается 1, после чего происходит возврат к шагу S2. Если же I(Х) не превышает максимального значения, то происходит переход к шагу S14. На шаге S14 определяется, не оказывается ли значение I(Х) меньше минимального значения Ilwrlim, которое является допустимым для значений I(Х). Если значение I(Х) меньше минимального, то происходит переход к шагу S15. На шаге S15 к переменной Csub прибавляется 1, после чего происходит возврат к шагу S2. Если же значение I(Х) оказывается не меньше минимального, то на этом весь процесс завершается, поскольку при этом предполагается, что операция позиционирования не была завершена по причинам, не связанным со значением I(Х).
Таким образом, вышеописанный процесс повторяется заданное число раз. Если при этом операции позиционирования не будут завершены нормально, то выполняются операции, предусмотренные на вышеописанных шагах S2 и S3, и на этом весь процесс завершается.
Как показано на фиг.6 и 7, значения интегрального параметра I являются различными для разных дорожек. Поэтому при необходимости сохранения всех значений интегрального параметра I для записи таких данных требуется выделить значительно больший объем памяти в вышеупомянутом ПЗУ 13 или на магнитном диске 1.
С другой стороны, для предварительно заданного числа дорожек можно использовать одно и то же приблизительное значение. Однако, как показано на фиг. 6 и 7, интегральный параметр I не изменяется равномерно по всем дорожкам. По этой причине требования о поддержании определенной точности значения интегрального параметра I и о снижении используемого объема памяти являются несовместимыми.
Исходя из сказанного выше, в предлагаемом дисководе одно и то же значение интегрального параметра I используется для полос, охватывающих некоторое заданное количество дорожек. Так, например, как показано на фиг.7, ширина полосы интегрального параметра I уменьшается на участке, где происходит значительное изменение величины этого интегрального параметра I, и увеличивается на участке с незначительным изменением интегрального параметра I.
Дискретные значения интегрального параметра I записываются в ПЗУ 13 и на поверхности магнитного диска 1 в виде таблицы, в которой указаны номера дорожек, определяющие ширину полосы интегрального параметра I, а также значение интегрального параметра I для каждой такой полосы.
КЖД 20 вычисляет значение интегрального параметра I в соответствии с положением текущей дорожки и в соответствии с данными, содержащимися в указанной таблице, и на основании вышеприведенных уравнений (1) или (2) рассчитывает данные для сервоуправления.
Таким образом, за счет использования одинаковых значений интегрального параметра I для заданных полос, охватывающих несколько дорожек, и изменения ширины полосы в соответствии с изменением значения интегрального параметра I удается совместить требования к точности интегрального параметра I и к снижению требуемого объема памяти.
Несмотря на то, что настройка интегрального параметра I и задание константы С выполняются при проведении заводских испытаний, значение интегрального параметра I может также изменяться в зависимости от окружающих условий, например от температуры окружающей среды и иных внешних факторов. Поэтому при появлении, например, в процессе эксплуатации дисковода ошибки позиционирования для оптимизации значений интегрального параметра I, а также константы С можно использовать вышеописанный процесс, показанный на фиг.5.
В связи с тем, что значения интегрального параметра I и константы С также определенным образом влияют на характеристики выполнения операции позиционирования, их оптимизация в зависимости от окружающих условий также может улучшить характеристики выполнения этой операции позиционирования и улучшить рабочие параметры дисковода.
Необходимо отметить, что настоящее изобретение не ограничено рассмотренным выше вариантом его выполнения и предполагает возможность внесения в него различных изменений и модификаций, не выходящих за его объем.
Промышленная применимость
В соответствии с настоящим изобретением корректирующее устройство задает интегральный параметр, сохраняемый в запоминающем устройстве, в соответствии с точностью вычислений, выполняемых арифметическим устройством, и корректирует эти вычисления, выполняемые арифметическим устройством. Таким образом, предлагаемое в изобретении решение позволяет использовать дисковод, который был отнесен к разряду забракованных в связи с тем, что требуемая точность определения интегрального параметра превосходит точность вычислений, выполняемых арифметическим устройством. Тем самым настоящее изобретение позволяет повысить выход годной продукции без существенного увеличения затрат.
Кроме того, в случае появления сбоя при выполнении операции позиционирования, заключающейся в перемещении устройства записи/воспроизведения в заданное положение, интегральный параметр может быть сброшен с помощью соответствующего устройства сброса. Таким образом, даже при изменении характеристики интегрального параметра в зависимости от окружающих условий значение интегрального параметра можно поддерживать в соответствующем диапазоне. Тем самым создается возможность поддерживать требуемые характеристики записи/воспроизведения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПРЕОБРАЗОВАТЕЛЯ ДИСКОВОДА | 1993 |
|
RU2114467C1 |
| УСИЛИТЕЛЬ С РЕГУЛИРУЕМЫМ КОЭФФИЦИЕНТОМ УСИЛЕНИЯ И ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИЕЙ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАННИЯ В ДИСКОВОДЕ | 2000 |
|
RU2250517C2 |
| ДИСКОВОД ДЛЯ НОСИТЕЛЯ ИНФОРМАЦИИ В ФОРМЕ ДИСКА, СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ДИСКА | 2002 |
|
RU2298843C2 |
| ОПТИЧЕСКИЙ ДИСК, ОПТИЧЕСКИЙ ДИСКОВОД, СПОСОБ ЗАПИСИ/ВОСПРОИЗВЕДЕНИЯ ОПТИЧЕСКОГО ДИСКА И ИНТЕГРАЛЬНАЯ СХЕМА | 2008 |
|
RU2472239C2 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ИНФОРМАЦИИ С ДИСКОВОГО НОСИТЕЛЯ ЗАПИСИ | 1992 |
|
RU2105356C1 |
| ДИСКООБРАЗНЫЙ НОСИТЕЛЬ ЗАПИСИ, УСТРОЙСТВО ЗАПИСИ, УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ И УСТРОЙСТВО ЗАПИСИ/ВОСПРОИЗВЕДЕНИЯ | 1991 |
|
RU2107954C1 |
| ДИСКОВОД ДЛЯ ЗАПИСИ ИНФОРМАЦИИ | 1993 |
|
RU2113019C1 |
| СПОСОБ И СИСТЕМА ЗАПИСИ ОБРАЗЦА СЕРВОСИСТЕМЫ НА НОСИТЕЛЕ ДАННЫХ | 1995 |
|
RU2151431C1 |
| НОСИТЕЛЬ ЗАПИСИ В ФОРМЕ ДИСКА, УСТРОЙСТВО ПРИВОДА ДИСКА И СПОСОБ ПРОИЗВОДСТВА ДИСКА | 2003 |
|
RU2300147C2 |
| ЗАЩИТА ОТ КОПИРОВАНИЯ КОМПАКТ-ДИСКОВ С ЦИФРОВОЙ ЗВУКОЗАПИСЬЮ | 2000 |
|
RU2249861C2 |
Изобретение относится к дисководу, способу его изготовления и контроллеру дисковода. Запоминающее устройство хранит интегральный параметр, характеризующий положение на дисковом носителе информации. Арифметическое устройство предназначено для вычисления данных для управления приводным устройством на основании информации о положении, выявленной устройством определения положения, и интегрального параметра, соответствующего этой информации о положении. Корректирующее устройство предназначено для задания интегрального параметра в соответствии с точностью вычислений, выполняемых арифметическим устройством, и для корректировки выполняемых им вычислений. При изготовлении дисковода устройство записи/воспроизведения перемещают во все радиальные положения, которые оно может занимать на дисковом носителе информации, после чего в каждом радиальном положении вычисляют интегральный параметр. Если значение интегрального параметра превышает точность вычислений, выполняемых арифметическим устройством, интегральный параметр корректируют, настраивая его на значение, лежащее в пределах точности вычислений, выполняемых арифметическим устройством. Контроллер дисковода предназначен для управления работой дисковода с корректировкой данных для управления приводным устройством при задании интегрального параметра в соответствии с точностью вычислений, выполняемых арифметическим устройством. Технический результат - повышение выхода годной продукции при изготовлении дисководов. 3 с. и 2 з.п.ф-лы, 8 ил.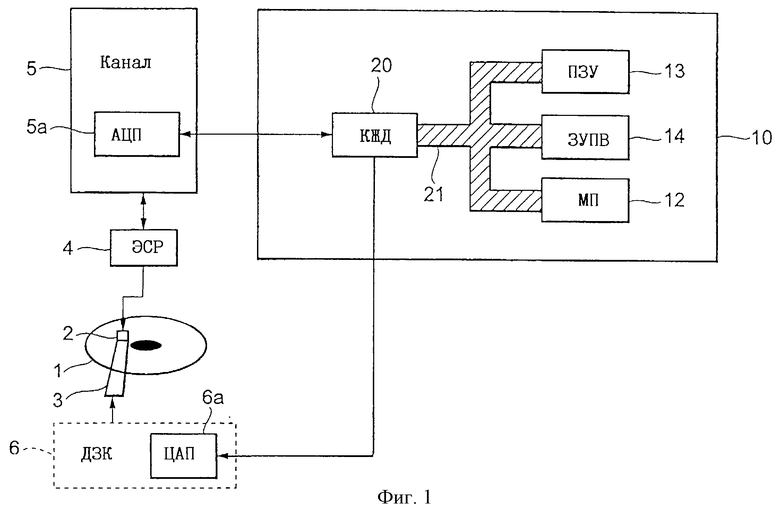
| US4594622 А 10.06.1986 | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| RU 96101813 A1 10.04.1998 | |||
| Формирователь импульсов отсчета информационных дорожек в накопителях на магнитных дисках | 1989 |
|
SU1691886A1 |
| Устройство для формирования сигнала управления положением магнитной головки | 1985 |
|
SU1247938A1 |

