Изобретение относится к усовершенствованию способов сервоуправления дисководами, в частности в рамках изобретения к усовершенствованию способов позиционирования преобразователя дисковода на заданную дорожку вращающегося диска дисковода на конечном этапе поиска указанной дорожки.
В накопителе на диске для хранения компьютерных файлов указанные файлы запоминаются в магнитных слоях на поверхности вращающихся дисков в виде намагниченных областей, которые представляют собой биты данных, из которых состоит файл, поэтому дисковод содержит несколько преобразователей считывания/записи, поддерживаемых на близком расстоянии от поверхности диска электромеханическим приводом, на который поступают электрические токи, соответствующие битам данных, для получения магнитных полей, которые намагничивают поверхностные слои в одном из двух направлений при их прохождении рядом с преобразователем. Следовательно, файлы могут быть считаны преобразователями, предназначенными для детектирования магнитных полей, сформированных вблизи поверхностей дисков намагниченными поверхностными слоями.
Для записи или считывания файла на дисковых поверхностях существуют концентрические дорожки данных, а для идентификации поверхности или поверхностей, содержащих конкретный файл, и дорожек данных на этих поверхностях, на которых располагается указанный файл, записи организованы в таблице расположены файлов. Во время записи или считывания файла преобразователь, который должен считывать или записывать данные, перемещается в радиальном направлении для совмещения с конкретной дорожкой посредством сервосистемы, которая приводится в режим отслеживания дорожки путем считывания серводанных, предварительно записанных магнитным способом на одной или нескольких дисковых поверхностях, и непрерывно осуществляет совмещение преобразователя и выбранной дорожки. Эта следящая система (сервосистема) также может работать в режиме поиска для перемещения преобразователей с текущей дорожки на заданную дорожку, на которую нужно записать новый файл или уже его содержащую.
Широко распространенные дисководы для хранения компьютерных файлов строятся, исходя из двух основных характеристик дисководов, вытекающих из описанной выше конструкции и способа управления, большого объема памяти и малых времен доступа к файлу. Позиционирование преобразователей посредством следящей системы допускает, чтобы дорожки данных были расположены близко друг к другу, поэтому дисководы могут обеспечивать запоминание огромных массивов данных пользователя в малом объеме. Среднее время случайной выборки является средневзвешенным временем поиска от одной дорожки до другой для всех возможных длин путей поиска. Вероятность более коротких путей поиска выше, чем вероятность длинных. Кроме того, наибольшую вероятность имеет поиск одной дорожки, и поэтому время на поиск одной дорожки имеет наивысший вес. Время позиционирования составляет больший процент от времени поиска для коротких путей и в общем случае наиболее короткая длина пути вносит наибольший процент во время позиционирования по отношению к общему времени поиска, поэтому значительное уменьшение времени позиционирования может привести к значительному сокращению времени поиска для наиболее коротких длин поиска, что, в свою очередь, должно уменьшить среднее время произвольной выборки. Настоящее изобретение направлено на сокращение среднего времени случайной выборки.
Поиски от одной дорожки до другой обычно реализуются с помощью одного из способов управления скоростью, в которых преобразователи перемещаются со скоростями, определяемыми таблицей профиля скоростей в памяти микропроцессора сервосистемы. Профиль скорости изменяет значение скорости как функцию расстояния до заданной дорожки. Во время поиска периодически определяются дискретные значения положения и скорости преобразователей и преобразователи ускоряются в соответствии с разницей между реальной скоростью преобразователя и скоростью из профиля скоростей для оставшегося для поиска расстояния. Набор значений (профиль) скорости выбирается для обеспечения быстрого ускорения преобразователей при инициировании поиска и замедления их движения в конце поиска заданной дорожки с помощью подбора требуемого набора значений скорости, соответственно больших для больших расстояний до заданной дорожки и уменьшающихся до нуля при уменьшении расстояния до заданной дорожки до нулевого значения.
Хотя данный общий способ может быть реализован достаточно успешно, он имеет ограничения, которые усложняют проблему позиционирования преобразователей на указанную дорожку на конечном этапе поиска. Профиль скоростей хранится как набор дискретных значений в просматриваемой таблице, но количество значений, которые могут быть запомнены, ограничено объемом памяти, выделяемой для управления скоростью во время поиска, поэтому скорости в таком наборе значений скоростей определяются приближенно. Кроме того, различие в дискретных значениях скорости в наборе и время между этими дискретными значениями увеличивается, когда скорость преобразователей становится малой на конечном этапе поиска. Кроме того, ускорение преобразователей ограничено мощностью, вырабатываемой усилителем мощности, управляющим приводом для ускорения преобразователей, поэтому скорость преобразователей будет соответствовать набору значений скорости только приблизительно. В результате преобразователи достигают окрестности заданной дорожки с различными скоростями, что может усложнить проблему позиционирования преобразователей на указанную дорожку, т. е. приведение их в "состояние покоя" на заданной дорожке, чтобы можно было начать запись или считывание. Следовательно, времена позиционирования, обычно достижимые при управлении положением преобразователей, могут нежелательным образом затягиваться, увеличивая требуемое время доступа к дорожке, на которую должен быть записан или с которой должен быть считан файл.
Для того чтобы минимизировать время, требуемое для позиционирования преобразователя на нужную дорожку, предлагалось использовать способ апериодического позиционирования, при котором преобразователи ускоряются или замедляются на последовательных интервалах апериодического движения в соответствии с управляющими сигналами, определяемыми начальными условиями, с которыми преобразователи входят в определенную для каждой дорожки область управления позиционированием, и требованием, что конечный этап позиционирования преобразователя на дорожку должен быть осуществлен с нулевой скоростью. Однако ограничения усилителя мощности в дисководе требуют, чтобы указанные интервалы были относительно длинными для достижения требуемого ускорения или замедления преобразователей для апериодического позиционирования. Как следствие апериодическое позиционирование для дисковода требует, чтобы цепь следящего управления размыкалась на длительные периоды времени.
Большие периоды размыкания следящей цепи снижают способность дисковода уменьшить возмущения, в частности силы, действующие на привод в течение интервала позиционирования, могут оказать ощутимое влияние на работу контроллера апериодического движения, когда интервал позиционирования является относительно длинным. Как известно, привод подвержен влиянию ряда возмущающих факторов, например сил кручения, прикладываемых к приводу воздухом, закручиваемым диском. Эти силы, если они не скомпенсированы, могут оказывать ощутимое влияние в течение длительного интервала времени позиционирования и будут препятствовать реализации апериодического позиционирования в процессе установления преобразователя на заданную дорожку. Таким образом, до создания изобретения задача минимизации времени позиционирования преобразователей на заданную дорожку на конечном этапе поиска при наличии внешних возмущающих воздействий не была решена достаточно эффективно.
Изобретение предлагает способ, который сохраняет преимущества апериодического позиционирования, в то же время компенсируя возмущающие воздействия, которые могут вызывать значительные отклонения при осуществлении способа чисто апериодического позиционирования от идеального отклика. Поэтому способ позиционирования по настоящему изобретению предполагает, что позиционирование преобразователей будет осуществлено, как при идеальном апериодическом способе, за несколько интервалов апериодического управления, каждый из которых состоит из множества временных отрезков, на которых осуществляется компенсация возмущений, действующих на привод в процессе позиционирования преобразователей. В частности, в течение первого временного отрезка каждого интервала апериодического перемещения преобразователей, управляющие сигналы, поступающие из микропроцессора следящей системы на усилитель мощности, который управляет приводом, определяются на основании апериодического позиционирования, т.е. в соответствии с уравнением управления, которому удовлетворяют условия апериодического позиционирования. Затем на каждом оставшемся временном отрезке каждого интервала апериодического управления, проектная скорость, точнее, скорость преобразователей, которая должна быть достигнута в начале временного отрезка в соответствии с условиями апериодического позиционирования, вычисляется и сравнивается с текущим значением скорости преобразователя, которое может быть определено любым удобным способом. Например, если дисковод содержит преобразователь скорости, то выходной сигнал такого преобразователя, принятый в начале временного отрезка, может быть использован в качестве текущего значения скорости. Однако, как будет обсуждаться более подробно ниже, изобретение не ограничивается только дисководами с преобразователями скорости привода. Управляющий сигнал, выдаваемый на усилитель мощности, затем корректируется добавлением интервального корректирующего значения, которое пропорционально разнице между проектируемым и текущим значениями скорости преобразователя. Следовательно, преобразователь отслеживает траекторию апериодического управления для точного достижения конечного положения, которое должно быть достигнуто при идеальном апериодическом позиционировании, т.е. с нулевой скоростью на дорожке в конце последнего интервала апериодического управления.
Предлагаемое изобретение обеспечивает сокращение времени доступа к дорожкам дисковода, на которой записаны данные.
Кроме того, изобретение позволяет минимизировать время доступа к дорожке за счет минимизации времени позиционирования преобразователя на дорожке дисковода на конечном этапе поиска дорожки с записью данных.
Таким образом, изобретение направлено на создание эффективного способа достижения преимуществ апериодического позиционирования в дисководе с компенсацией возмущающих воздействий, препятствующих успокоению в способе апериодического позиционирования.
Другие цели, особенности и преимущества изобретения будут очевидны из рассмотрения нижеследующего описания совместно с чертежами и формулой изобретения.
На фиг. 1 показана блок-схема типового дисковода, в котором реализован способ; предлагаемый в изобретении; на фиг. 2 - сравнение зависимостей скорости преобразователя времени для идеального апериодического позиционирования и позиционирования в соответствии с изобретением; на фиг. 3 - сравнение зависимостей управляющего сигнала от времени для идеального апериодического позиционирования и позиционирования в соответствии с изобретением; на фиг. 4 - блок-схема алгоритма поиска микропроцессора следящей системы для перемещения преобразователей дисковода на заданную дорожку, на которую должен быть записан или с которой должен быть считан файл; на фиг. 5 - блок-схема, иллюстрирующую способ позиционирования преобразователя на заданную дорожку в соответствии с изобретением; на фиг. 6 -блок-схема, иллюстрирующая модификацию способа для позиционирования преобразователя на заданную дорожку в соответствии с настоящим изобретением.
На фиг. 1 показана блок-схема 10 дисковода, в котором может быть реализован способ, предложенный в изобретении. В частности, фиг. 1 иллюстрирует признаки, обычно характеризующие дисковод и используемые при осуществлении способа, соответствующего изобретению. Как известно, такие признаки варьируются от одного дисковода к другому, поэтому фиг. 1 не предназначена для иллюстрации конкретного дисковода. Скорее он предназначен для представления общих особенностей дисковода для того, чтобы показать, каким образом признаки любого дисковода могут быть использованы для осуществления способа, соответствующего изобретению.
В принципе дисковод 10 содержит несколько дисков 12, 14, которые смонтированы на шпинделе 16 для вращения дисков вокруг оси шпинделя 16. Диски 12 и 14 имеют на своей поверхности магнитные слои, чтобы данные, получаемые от основного компьютера (не показан), могли быть записаны на диски в виде намагниченных ячеек посредством преобразователей считывания/записи, такими как преобразователь 18 на фиг. 1, который расположен над поверхностью диска в непосредственной близости от нее. Дисковод 10 содержит схему 20 считывания/записи, которая получает файл для записи из интерфейса 22 основного компьютера и после кодирования передает этот файл на преобразователь 18 считывания/записи для записи данных на диск 12. Затем файл может быть считан преобразователем 18, декодирован схемой считывания/записи 20 и передан в интерфейс 22 основного компьютера. Управление и координация работы дисковода 10 осуществляются командами, выдаваемыми системным микропроцессором 24 в интерфейс 22 основного компьютера и через системную логическую схему 26 - на схему считывания/записи 20.
Аналогично системный микропроцессор 24 выдает команды на микропроцессор слежения 28, который управляет положением преобразователя 18 так, чтобы файл мог быть записан или считан из любого положения над любой поверхностью диска. Более конкретно поверхности дисков разделены на концентрические дорожки данных, такие как дорожка 30 на верхней поверхности 32 диска 12, а микропроцессор слежения 28 программируется для получения команд из системного микропроцессора 24 через системную логическую интегральную схему (ИС) и генерации команд и управляющего сигнала, которые будут осуществлять перемещение преобразователя 18 считывания/записи от одной дорожки до другой и управлять положением преобразователя 18, отслеживая дорожку данных после завершения поиска. Обычно команды и управляющий сигнал, подаваемые на логическую ИС 34 следящей системы, и управляющий сигнал, подаваемый на усилитель мощности 36, обеспечивают протекание тока через катушку индуктивности 38 привода 40, на котором смонтирован на кронштейнах 42 преобразователь считывания/записи, например преобразователь 18. Кронштейны 42 проходит внутрь пакета дисков 12 и 14, смонтированных на шпинделе 16. Катушка 38 помещена в магнитное поле так, что управляющий сигнал преобразуется сначала в ток катушки 38, а затем в силу, которая может использоваться для ускорения преобразователя считывания-записи 18 в любом радиальном направлении относительно дисковых поверхностей.
Чтобы микропроцессор слежения мог генерировать управляющий сигнал, необходимый для перемещения преобразователей считывания/записи 18 при поиске дорожки или ее отслеживании, обычно на одну или несколько дисковых поверхностей записывают схемы (шаблоны) слежения и считывают их для формирования информации о положении преобразователя, и эта информация передается на микропроцессор слежения 28. Общим подходом по отношению к формированию информации о положении преобразователя (фиг. 1) является выделение одной поверхности 44 одного диска (на фиг. 1 диска 14) для следящего управления приводом 40 и записи схем (шаблонов) слежения на выделенную поверхность слежения при изготовлении дисковода 10. Эти шаблоны затем считываются следящим преобразователем 46, поддерживаемым посредством привода 40 и кронштейна 47 в непосредственной близости от выделенной поверхности 44 слежения, для формирования сигналов, указывающих положение следящего преобразователя для передачи их на микропроцессор слежения 28, как показано на фиг. 1 линией передачи сигнала 48. Соответствующий формат шаблонов слежения, записанных на выделенную дисковую поверхность слежения дисковода, описан в заявке на патент США N 07/738053 на "Дисковод с усовершенствованной следящей системой" от 31.07.1991. Как описано в этой заявке, выходной сигнал усилителя мощности 36, т. е. ток через катушку привода 38, может быть подан на микропроцессор слежения 28, как символически показано на фиг. 1 линией 50, чтобы передать последующую информацию в соответствии с механическим состоянием следящего преобразователя 46.
Как показано ранее, управление положением и перемещением преобразователя 18 считывания/записи в дисководе с конкретной поверхностью слежения 44 осуществляется посредством управления положением и перемещением следящего преобразователя. Для этого отслеживаемые дорожки, одна из которых обозначена 52, определяются шаблонами слежения на данной поверхности слежения, а дорожки данных и дорожки слежения образуют цилиндры, каждый из которых содержит дорожку слежения и множество дорожек данных, по одной для каждой поверхности записи данных (цилиндр, содержащий дорожку данных 30 и дорожку слежения 52 на фиг. 1 обозначен позицией 54). Более подробное описание следящей системы дисковода с описанными признаками можно найти в вышеупомянутой заявке на патент США (сер. N 738053).
Полезной отличительной чертой, также раскрытой в указанной заявке, является возможность подстройки информационного сигнала, принятого от следящего преобразователя 46, с целью компенсации механического смещения между следящими преобразователем 46 и каждым из преобразователей считывания/записи 18. Как объяснено в упомянутой заявке, определенные заранее значения смещения могут быть вычтены из данных о положении следящего преобразователя в логической ИС 34 следящей системы путем подачи сигнала смещения на дифференциальный усилитель (не показан), который преобразует принятые от следящего преобразователя сигналы и сигнал ошибки позиционирования, передаваемый на микропроцессор слежения 28. Для специалиста очевидно, что во время отслеживания дорожки и позиционирования на заданную дорожку должно регулироваться положение преобразователей считывания/записи 18, а не следящего преобразователя 46. Использование этого признака будет обсуждаться ниже. Однако следует заметить, что такой признак не является необходимым в рамках данного изобретения, положение каждого преобразователя считывания/записи 18 может быть вычислено, исходя из положения следящего преобразователя 46, после того, как смещения измерены. Полезный способ определения и использования смещений описан в заявке на патент США (сер. N 08/060858 на "Усовершенствованный способ отслеживания дорожки записи данных для дисководов" от 12.05.1993).
Еще одним признаком дисководов, который при его наличии в дисководе может быть использован в настоящем изобретении, является преобразователь (датчик) скорости 56, показанный пунктирной линией на фиг. 1, механически связанный с приводом 40 и предназначенный для выдачи сигнала скорости вращения привода 40 в логическую ИС 34 следящей системы.
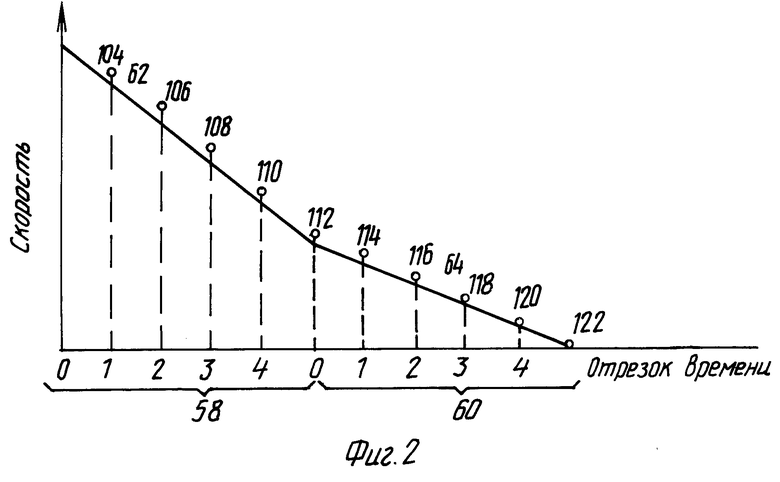
Как было отмечено ранее, способ, соответствующий изобретению, использует управляющие сигналы, которые определяются, частично, в соответствии с идеальным способом апериодического позиционирования преобразователя 18 на дорожках данных на конечном этапе поиска. Соответственно, будет полезно кратко рассмотреть стратегию апериодического позиционирования в качестве основы для описания способа позиционирования по настоящему изобретению. С этой целью представлены фиг. 2 и 3, которые изображают скорость и ускорение преобразователя 18 при идеальном способе апериодического позиционирования второго порядка, а также при осуществлении способа согласно изобретению, который будет обсуждаться ниже. Хотя на фиг. 2 и 3 представлен способ апериодического позиционирования второго порядка, специалистам должно быть ясно, то изобретение не ограничивается определением управляющих сигналов в соответствии со способом апериодического позиционирования второго порядка. Скорее способ апериодического позиционирования второго порядка, представленный на фиг. 2 и 3, является конкретным примером, поясняющим настоящее изобретение.
Стратегия апериодического позиционирования предусматривает, что объект управления, например преобразователь считывания/записи дисковода, должен быть перемещен в заданное положение за множество интервалов апериодического управления, количество которых равно порядку используемого конкретного апериодического способа управления. В связи с этим в апериодическом способе второго порядка объект управления должен быть перемещен в заданное положение за два интервала апериодического перемещения, обозначенных соответственно 58 и 60 на фиг. 2 и 3. В каждом интервале апериодического управления объект управления равномерно ускоряется или замедляется так, что график скорости объекта управления, как функция времени, должен иметь форму двух прямых линий, представленных на фиг. 2 линиями 62 и 64. Аналогично в каждом интервале апериодического управления ускорение пропорционально сигналу управления так, что при идеальном способе апериодического позиционирования второго порядка объекта управления сигнал управления должен иметь два последовательных постоянных значения, которые показаны на фиг. 3 пунктирными линиями 66 и 68.
В случае, если управляющий сигнал выдается на усилитель, как в изобретении, для генерации тока, который протекает через катушку, помещенную в магнитное поле, соотношение между управляющим сигналом и ускорением может быть выражено уравнениями
A(N) = Km1(N) (1)
I(N) = KiU(N), (2)
где A(N) является ускорением объекта управления на N-м интервале апериодического управления 1 (N) - ток через катушку на N-м интервале апериодического управления; U(N) - значение сигнала управления на N-м интервале; Km - константа, определяемая механическими характеристиками управляемой системы, например привода дисковода; Ki - проводимость усилителя.
Апериодическое позиционирование в идеале реализуется так, что управляющий сигнал выражается в каждом интервале апериодического управления через состояние объекта управления в начале интервала, т.е. через положение и скорость объекта управления в начале интервала. В способе второго порядка это соотношение может быть выражено так
U(N) = -KрX(N) - KvV(N), (3)
где X(N) и V(N) определяют состояние системы в начале N-го интервала апериодического управления Kp и Kv являются константами управления, задаваемыми тем условием, что состояние системы в конце N-го интервал равно нулю, т.е. что объект управления приходит к нулевой ошибкой положения в конечное положение, от которого отмеряется положение X объекта управления. В случае, показанном на фиг. 2 и 3, Kp и Kv могут быть определены из уравнений
2 - Kv Ki Km Td - Kp Ki Km Td2/2 = 0 (4)
1 - Kv Ki Km Td + Kp Ki Km Td2/2 = 0 (5)
где Td равно длительности интервала апериодического управления. Дополнительные константы апериодического управления определяются аналогично из способов апериодического управления более высокого порядка.
Предлагаемое изобретение предусматривает использование констант апериодического управления Kp (DB) и K (DB) способом, который будет описан ниже, который базируется на идеальной стратегии апериодического управления, описанной выше, и в этом случае константы Kp (DB) и K (DB) должны иметь значения Kp и Kv, определяемыми в соответствии с управлениями (4) и (5). Аналогично желательно применить стратегию апериодического позиционирования высокого порядка для настоящего изобретения, а дополнительные константы апериодического управления должны быть равны константам, определенным обычным способом. Хотя в изобретении используется константы Kp (DB) и K (DB), способ соответствующий изобретению, эти не ограничивается. При этом предполагается, что дополнительные константы апериодического управления могут быть определены и использованы в рамках данного изобретения.
Хотя описанная выше стратегия апериодического управления и может быть использована для позиционирования преобразователя считывания/записи на заданную дорожку, проблемы, возникающие на практике, делают идеальную стратегию апериодического управления нежелательной. Например, усилители мощности дисководов обычно имеют ограниченные возможности по управлению мощностью, чтобы удовлетворить требованиям по мощности, предъявляемым оборудованием, т.е. компьютером, в котором установлен дисковод, следовательно, ускорение преобразователей ограничено так, что интервалы апериодического управления должны быть растянуты, чтобы избежать чрезмерного управляющего усилия, которое требуется при более коротких интервалах, используемых в способах высоких порядков. Однако следующий контур разомкнут в течение каждого интервала апериодического управления, поэтому силы, отличные от тех, которые вызваны протеканием тока через катушку привода, могут привести к большим ошибкам конечного механического состояния преобразователя. Такие ошибки требуют времени для коррекции и, соответственно, увеличивают время доступа для перемещения на заданную дорожку. Хотя возмущения могут быть промоделированы и скомпенсированы при апериодической позиционировании без удлинения интервала апериодического управления, такой подход может предъявить дополнительные требования к микропроцессору слежения, которые находятся за пределами его возможностей. Таким образом, подход с чисто апериодическим управлением, хотя и возможен, для позиционирования преобразователей дисковода, но не эффективен. Предлагаемое изобретение предлагает альтернативный способ позиционирования, который сохраняет все преимущества чисто апериодической стратегии, но позволяет избежать ее основных проблем. Два примера осуществления такого способа будут обсуждаться со ссылками на фиг. 5 и 6.
Примеры осуществления изобретения.
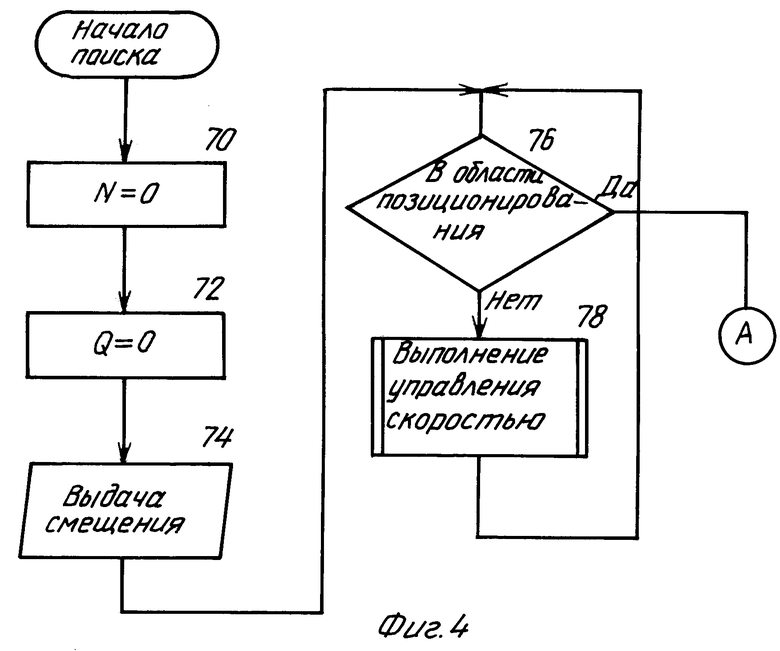
На фиг. 4 представлена блок-схема процедуры поиска, которая применяется для осуществления способа позиционирования, согласно настоящему изобретение. Микропроцессор слежения 28 в ответ на команды доступа к конкретной дорожке данных от системного микропроцессора 24 для запоминания или воспроизведения файла посредством конкретного преобразователя считывания/записи 18 устанавливает на шаге 70 индекс интервала апериодического управления N равным нулю. Этот индекс идентифицирует каждый из множества интервалов апериодического управления, которые, в рамках настоящего изобретения, имеют длительность, выбранную на основании возможностей усилителя мощности 36, достаточную для формирования множества временных отрезков, в течение которых может быть определено механическое состояние преобразователя 18 во время позиционирования его на дорожку данных. Таким образом, например, в следящей системе дисковода, описанной в вышеупомянутой заявке на патент США (сер. N 738053) операции по отслеживанию выполняют во время прерываний работы микропроцессора слежения 28, которые имеют место через равные промежутки времени, а каждый интервал апериодического управления должен содержать фиксированное количество интервалов времени между последовательными прерываниями. С другой стороны, отрезки времени, которые образуют каждый интервал апериодического управления, могут быть временем цикла подпрограммы слежения, в течение которого повторно осуществляется следящее управление посредством измерения параметров, связанных с текущим состоянием следящей системы дисковода, и вычисления значения управляющего сигнала, выдаваемого в усилитель мощности 36, для изменения указанного состояния требуемым образом. Объединение в группы множества отрезков времени для получения интервала апериодического управления показано пронумерованными моментами времени на графиках фиг. 2 и 3.
После инициализации индекса N на шаге 72 индекс Q отрезка времени устанавливается в ноль. Такой индекс обозначает каждый временной отрезок каждого из интервалов апериодического управления, в течение которых осуществляется позиционирование преобразователя 18 на заданную дорожку.
Как отмечено выше, следящая система, которая описана в вышеупомянутой заявке N 738053, имеет возможность выдавать сигнал смещения на логическую ИС 34 следящей системы для компенсации рассогласования между следящим преобразователем и преобразователем считывания/записи и, в этом случае, сигнал смещения подается на преобразователь считывания/записи, который должен быть позиционирован на дорожку данных для считывания или записи файла, что показано на шаге 74 на фиг. 4. Затем микропроцессор слежения 28 вводит цикл, включающий блок принятия решения 76 и операционный блок 78 на фиг. 4. После проверки, достиг ли преобразователь 18 отмеренного от заданной дорожки положения, на которой должно быть осуществлено позиционирование (шаг 76), микропроцессор слежения в блоке 78 должен выполнить обусловленное управление скоростью, или поиск, т.е. подпрограмму, которая осуществляет ряд шагов: ускорение преобразователя 46 и, следовательно, удаление преобразователя 18 от текущей дорожки, замедление движения преобразователей по направлению к заданной дорожке, на которую должен быть записан, или с которой должен быть считан файл. Способ, в котором осуществлялся поиск с использованием управления скоростью движения преобразователей, описан в вышеупомянутой заявке N 738053 и не требует здесь дальнейшего рассмотрения. В процессе поиска преобразователь 18 должен в конечном счете быть переведен в положение, в котором должно быть осуществлено позиционирование на заданную дорожку, и в этот момент микропроцессор слежения 28 выйдет из цикла подпрограммы в подпрограмму позиционирования, представленную на фиг. 5 и связанную соединителем, обозначенным меткой A на фиг. 4 и 5. Соответственно выход в подпрограмму позиционирования имеет место в случае, когда преобразователь 18 приближается на расстояние в одну дорожку до заданной дорожки или входит в область точного управления, определенную для каждой дорожки данных, обычно равную половине расстояния между соседними дорожками.
Перед рассмотрением способа позиционирования по изобретению будет полезно отметить особенность подпрограммы поиска, показанной на фиг. 4. Как известно, наиболее часто осуществляются поиски между соседними цилиндрами данных и отслеживаемыми дорожками. При этом предусматривается, что для таких видов поиска способ позиционирования по настоящему изобретению должен осуществляться без выполнения подпрограмм управления скоростью, которые должны выполняться для длинных путей поиска. Такое немедленное переключение микропроцессора слежения 28 в режим позиционирования, вызванное выбором области позиционирования, равной ширине одной дорожки, и показанные на фиг. 4 блок принятия решения 76, предшествующий блоку управления скоростью 78, полностью соответствует следящей системе дисковода, описанной в упомянутой заявке N 738053. Как описано, каждая дорожка данных адресуется таким образом, что положение преобразователя 18 по отношению к заданной дорожке могло быть определено для любого положения дисковой поверхности 32.
На фиг. 5 представлена блок-схема микропрограммы микропроцессора слежения 28, посредством которой осуществляется одна из реализаций способа позиционирования по настоящему изобретению. Для примера в блок-схеме на фиг. 5, что стратегия апериодического позиционирования, которая используется для определения констант апериодического управления используемых в настоящем изобретении, является стратегией второго порядка, поэтому позиционирование преобразователя 18 на заданную дорожку должно быть выполнено за два интервала апериодического управления. Каждый из указанных интервалов апериодического управления состоит из множества Qmax отрезков времени, за которые выполняются шаги, показанные на фиг. 5. Каждый из этих отрезков времени может быть определен как отдельный временной цикл, вводимый в микропроцессор слежения 28, или при наличии дисковода, имеющего сервосистему, описанную в вышеупомянутой заявке N 738053, может соответствовать одному из прерываний микропроцессора слежения 28. В любом случае, настоящее изобретение предполагает, что преобразователь 18 должен быть приведен в "состояние покоя" на заданной дорожке за количество временных отрезков, которое определяется произведением количества временных отрезков в интервале апериодического управления на количество интервалов апериодического управления, выбранных для определения констант апериодического управления, которые используются при осуществлении способа позиционирования преобразователя в соответствии с настоящим изобретением. Как отмечено выше, количество интервалов апериодического управления является функцией порядка системы.
На начальных этапах каждого временного отрезка каждого интервала апериодического управления, посредством которых реализуется способ позиционирования по изобретению, параметры, указывающие текущее механическое состояние, выдаются из логической ИС 34 следящей системы в качестве основы для определения управляющего сигнала, который должен быть выдан на усилитель мощности 36 через логическую ИС 34. Эти параметры содержат ошибку положения X (шаг 80), обеспечивающую меру расстояния между преобразователем 18 и заданной дорожкой, и другие параметры, зависящие от особенностей дисковода, на котором реализуется способ в соответствии с настоящим изобретением. В частности, если дисковод содержит датчик определения скорости 56, то также должна вводиться скорость преобразователя 18. Аналогично вводится значение тока, протекающего через катушку 38 в начале временного отрезка, если дисковод, на котором реализуется способ в соответствии с настоящим изобретением, имеет возможность измерять протекающий ток и выдавать величину указанного тока в микропроцессор слежения 28.
Эти дополнительные параметры могут использоваться для определения принятого значения скорости преобразователя 18 в начале временного отрезка на шаге 82 на фиг. 5. Таким образом, тот датчик скорости 56 должен выполнять шаг 82 измерения скорости. В этом случае принятое значение скорости должно быть равно реальной скорости преобразователя 18, которая измерена датчиком скорости 56.
Однако в соответствии с изобретением принятая скорость необязательно должна быть равна реальной скорости преобразователя 18, а дисковод необязательно должен содержать датчик скорости 56. Для специалиста очевидно, что реальное конечное состояние преобразователя 18 необязательно должно быть конечным состоянием при идеальном апериодическом позиционировании, в котором скорость преобразователя 18 и ошибка положения для преобразователя 18 равны нулю. Действительно, такие условия не соблюдаются во время отслеживания дорожки преобразователем 18, при записи или считывании файлов с дорожки данных.
Таким образом, способ по изобретению не ставит своей целью приближение конечного состояния преобразователя 18 к состоянию при идеальном апериодическом перемещении. Настоящее изобретение способствует достижению конечного состояния преобразователя 18, в котором режим отслеживания дорожки следящей системой дисковода, выполняемого во время считывания или записи файлов, реально будет начинаться при нахождении преобразователя 18 в состоянии, которое может иметь место при отслеживании дорожки. Компьютерное моделирование показало, что это конечное состояние преобразователя 18 может быть достигнуто с использованием приближенных значений текущей скорости преобразователя 18 в качестве принятой скорости в начале каждого отрезка времени каждого интервала апериодического управления.
В соответствии с вышеуказанными замечаниями, второй способ определения принятого значения скорости преобразователя, используемый в случае, когда подаваемые на микропроцессор слежения 28 параметры включают ток, протекающий через катушку 38 привода, предусматривает согласование средней скорости преобразователя 18, определенной для предыдущего отрезка времени, с ускорением преобразователя 18 в течение этого отрезка времени. Таким образом, если положение преобразователя 18 в начале отрезка времени Q обозначено X (Q) и продолжительность каждого интервала апериодического управления обозначено T, то принятая скорость может быть определена в соответствии с выражением
Vacc (Q) = (1/T) [X (Q) - X (Q-1)] + (1/2) Km I (Q) T, (6)
в котором первый член есть средняя скорость в середине предыдущего отрезка времени, а второй член является приращением скорости от середины предыдущего отрезка времени до начала текущего отрезка времени с использованием выражения для ускорения преобразователя 18 со взаимосвязи с током катушки привода согласно управлению (1).
В дисководах, которые не имеют ни датчика скорости 56, ни средств для выдачи значения тока катушки привод в микропроцессор слежения 28, принятая скорость может быть определена на основе ряда последовательных положений преобразователя 18 в соответствии с соотношением
Vacc = (1/T) [(5/3) X(Q) - (5/2) X (Q-1) + X(Q-2) - (1/6) X(Q-3)], (7)
где числовые коэффициенты последовательных положений преобразователя 18 выбраны таким образом, чтобы учесть влияние ускорения преобразователя 18 и производной ускорения по времени, так называемый "толчок" преобразователя 18, при определении принятого значения скорости преобразователя 18.
Когда в начале временного отрезка определена принятая скорость преобразователя 18, в блоке принятия решения 84 осуществляется проверка, завершено ли позиционирование. В случае, если константы апериодического управления, в соответствии с изобретением определены из стратегии апериодического управления второго порядка, то используются два интервала апериодического управления для позиционирования преобразователя 18 на заданную дорожку, а соответствующий выполняющийся критерий будет состоять в том, что индекс интервала апериодического управления N, изначально равный нулю в начале поиска, который выполняется в способе позиционирования по настоящему изобретению, устанавливается равным 2, как показано на фиг. 5 (как будет обсуждаться ниже, индекс интервала апериодического управления увеличивается на единицу в конце каждого такого интервала). В случае, если константы апериодического управления, применяемые в рамках изобретения, определены из апериодической стратегии высокого порядка, порядок такой стратегии должен быть использован в блоке принятия решения 84.
В способе позиционирования по изобретению апериодическое значение управляющего сигнала, выдаваемое на усилитель мощности 36, определяется на первом временном отрезке каждого интервала апериодического управления, используя уравнение управления для идеальной стратегии апериодического позиционирования, которая служит в качестве основы для определения констант апериодического управления, использующихся при реализации способа по настоящему изобретению. Эти значения затем корректируются на каждом временном отрезке для определения сигналов управления, выдаваемых на усилитель мощности для достижения позиционирования преобразователя 18, которое точно отслеживает идеальное апериодическое позиционирование для перемещения преобразователя в положение, точно соответствующее заданной дорожке, со скоростью, точно равной нулю.
Для определения апериодического значения сигнала на шаге 86 проверяется индекс Q, идентифицирующий каждый временной отрезок каждого апериодического интервала, при каждом выполнении подпрограммы, иллюстрируемой блок-схемой на фиг. 5, для которого индекс апериодического перемещения меньше, чем порядок стратегии апериодического управления, используемой для определения констант апериодического управления. Если, как это должно быть при начальном выполнении программы, индекс Q временного отрезка равен нулю, апериодическое значение вычисляется на шаге 88 для использования во всем интервале апериодического управления. В случае, когда способ, соответствующий изобретению, использует константы апериодического управления второго порядка Kp (DB) и Kv (DB), как описано выше, значение управляющего сигнала при апериодическом управлении определяется в соответствии с соотношением
U(N) = -Kp(DB)X - Kv(DB)Vacc, (8)
где Kp(DB) и Kv(DB) являются константами апериодического управления второго порядка, определяемыми как описано ранее, X - есть положение головки 18 в начале первого временного отрезка интервала апериодического управления, а Vacc является принятым значением скорости преобразователя в начале первого временного отрезка интервала апериодического управления, определенным как описано выше.
В примере осуществления изобретения, иллюстрируемом блок-схемой по фиг. 5, значение коррекции управляющего сигнала выбирается равным нулю для первого временного отрезка каждого интервала апериодического управления (шаг 90), так чтобы управляющий сигнал, выдаваемый на усилитель мощности 36 на первом временном отрезке каждого интервала апериодического перемещения, определенный добавлением значения коррекции сигнала к значению управляющего сигнала при апериодическом управлении (шаг 92), был равен значению управляющего сигнала при апериодическом управлении. Такой сигнал выдается на усилитель мощности 36 (шаг 94), и индекс Q временного отрезка увеличивается (шаг 96) для осуществления коррекций, определенных для последующих временных отрезков интервала апериодического управления.
После приращения индекса временного отрезка, значение индекса сравнивается с количеством временных отрезков Qmax каждого интервала апериодического управления (шаг 98), и если значение индекса меньше Qmax, то микропроцессор слежения 28 возвращается к началу блок-схемы подпрограммы для определения и выдачи сигнала коррекции на усилитель мощности 36 для следующего временного отрезка интервала апериодического управления. В дисководах, имеющих следящую систему, описанную в заявке N 738053, такой возврат может быть вызван завершением текущего прерывания, в котором выполняются указанные выше операции; в дисководах, в которых эти операции выполняются при выполнении основной программы микропроцессора слежения 28, в программу может быть включен шаг ожидания (не показан) для установки фиксированной продолжительности временных отрезков интервалов апериодического управления.
В каждом временном отрезке каждого интервала апериодического управления, следующем за первым таким временным отрезком, значение индекса временного отрезка Q больше нуля. В таких временных отрезках апериодическое значение сигнала вычисленное на первом временном отрезке, корректируется для компенсации возмущений, которые могут заставить преобразователь 18 отклониться от осуществляемого позиционирования при использовании идеальной стратегии апериодического управления. В связи с этим в каждой последующий временной отрезок каждого интервала апериодического управления в начале временного отрезка вычисляется проектируемая скорость для идеальной стратегии апериодического управления (шаг 100), используемая для определения коррекции временного отрезка, которая в совокупности с интервальными корректирующими значениями для оставшихся временных отрезков всех интервалов апериодического управления приводит к позиционированию преобразователя 18 на заданную дорожку, которое является точным приближением к идеальному апериодическому позиционированию.
Проектируемая скорость определяется на основе характеристик идеального апериодического позиционирования, показанного на фиг. 2 и 3. Точнее, как показано на фиг. 2, идеальное апериодическое позиционирование предусматривает постоянное ускорение преобразователя 18 в течение каждого временного отрезка каждого интервала апериодического управления и это ускорение определяется значением сигнала управления при апериодическом управлении в соответствии с уравнениями (1) и (2). Таким образом, проектируемая скорость, т.е. скорость преобразователя 18, которая должна быть достигнута при идеальном апериодическом позиционировании в начале Q-го временного отрезка N-го интервала апериодического управления, задается уравнением
Vproj(Q) = KmKiU(N)QT (9)
Значение коррекции на временном отрезке для Q-го временного отрезка определяется (шаг 102) в соответствии с соотношением:
U(Q) = Kv(DB)[Vproj(Q) - Vacc(Q)] (10)
Таким образом, значение коррекции является членом, который компенсирует различие между скоростью преобразователя 18, которая должна быть при идеальном апериодическом позиционировании, и скоростью преобразователя при наличии возмущений. Значение коррекции на временном интервале должно быть добавлено к идеальному значению корректирующего сигнала, вычисленного на первом временном отрезке каждого интервала апериодического управления (шаг 92), и выдано на усилитель мощности 36 (шаг 94), как описано выше.
Значение коррекции управляющего сигнала, выдаваемое на усилитель мощности 36 на каждом временном отрезке, и влияние коррекций при позиционировании преобразователя 18 показано на фиг. 2 и 3 для случая, когда привод 40 является подвержен возмущениям, которые заставляют преобразователь 18 отклониться от заданной дорожки в конце поиска, т.е. достичь скоростей, превышающих скорости при идеальном апериодическом позиционировании. В частности, на фиг. 2 представлено сравнение принятых значений скорости, показанных кружками 104, 106, 108, 110, 112, 114, 116, 118, 120 и 122, определенных в начале временных отрезков интервалов апериодического управления, с кривой идеальной скорости при апериодическом управлении, а на фиг. 3 представлены соответствующие интервальные коррекции, которые должны быть добавлены к значению управляющего сигнала при апериодическом управлении на каждом из временных отрезков. Таким образом, например, для принятой скорости, указанной кружком 108, определенной в начале временного отрезка Q = 3 интервала N = 1 апериодического управления, коррекция на временном отрезке, определенная в соответствии с уравнением (10) должна иметь отрицательное значение, обозначенное позицией 124 на фиг. 3, что должно привести к большей тормозящей силе на приводе 40, которая должна быть приложена при идеальной апериодической стратегии для компенсации тенденции возмущающих сил отклонить преобразователь 18 от заданной дорожки. Как показано на фиг. 2, объединение сигналов коррекции на временных отрезках приводит к траектории, которая завершается нулевой скоростью преобразователя 18 на конечном этапе позиционирования и положением, которое по сравнению с нулевым отклонением для идеального апериодического позиционирования отличается областями под кривой скорости при апериодическом управлении и траекторией преобразователя 18, указанной точками принятых значений скорости. Таким образом в конце последнего временного отрезка последнего интервала апериодического управления преобразователь должен быть точно установлен на заданную дорожку со скоростью, равной нулю.
В соответствии с фиг. 5, каждый раз, когда индекс временного отрезка Q достигает максимального значения Qmax индекс интервал N при апериодическом управлении увеличивается (шаг 126), а индекс временного отрезка Q обнуляется (шаг 128), поэтому позиционирование преобразователя 18 будет осуществлено за N интервалов апериодического управления, а затем должно завершиться в блоке принятия решения 84. После завершения позиционирования микропроцессор слежения 28 переходит к обычному режиму отслеживания дорожки.
Фиг. 6 иллюстрирует модификацию изобретения, полезную для применения в дисководах, в которых постоянная времени усилителя мощности больше по сравнению с длительностью временных отрезков интервалов апериодического управления. В этом случае ток катушки привода может значительно отличаться от значения, определяемого уравнением (2) для нескольких временных отрезков в начале каждого интервала апериодического управления, что приводит к конечному положению, которое заметно отличается от конечного положения при идеальном апериодическом позиционировании. Фиг.6 иллюстрирует способ, в котором влияние большой постоянной времени усилителя мощности может быть скомпенсировано.
Большинство операций в примере осуществления, иллюстрируемом фиг. 6, являются теми же, что и для варианта, показанного на фиг. 5, поэтому необходимо отметить только имеющиеся отличия. Соответственно, шаги, которые идентичны шагам, реализованным в варианте, показанном на фиг. 5, обозначены теми же позициями, что и на фиг. 5, и не будут обсуждаться далее.
В реализации изобретения, показанной на фиг. 6, предусматривается, что дисковод имеет возможность выдавать значение тока катушки привода на микропроцессор слежения 28, это значение тока вводится на шаге 130 после ввода на шаге 80 ошибки положения головки. Ток катушки привода затем является основой для определения второго корректирующего значения на временном отрезке, которое добавляется к корректирующим значениям на временных отрезках, показанных на фиг. 5, эти корректирующие значения для временных отрезков, отличных от первых временных отрезков каждого интервала апериодического управления, содержащих корректирующее значение первого временного интервала, определяются так, как описано для фиг. 5. Таким образом, реализация, показанная на фиг. 6, предусматривает определение на шаге 102 корректирующего значения ΔU1 на первом временном отрезке и на следующем шаге 132 корректирующего значения на временных отрезках, отличных от первых временных отрезков каждого интервала апериодического управления. Аналогично так как большая постоянная времени усилителя мощности должна иметь наибольшее влияние на позиционирование преобразователя на первом временном отрезке каждого интервала апериодического управления, то корректирующее значение определяется также для каждого первого временного отрезка каждого интервала апериодического управления, причем полезно сначала рассчитать корректирующее значение на каждом первом временном отрезке каждого интервала апериодического управления.
При этом очевидно, что влияние большой постоянной времени усилителя мощности 36 должно задерживать изменения тока, протекающего через катушку привода 38, при изменении управляющего сигнала, выдаваемого микропроцессором слежения 28. Хотя такая задержка будет иметь пренебрежимо малое влияние на позиционирование преобразователя 18 для малых изменений сигнала управления от одного временного отрезка интервала апериодического управления до другого временного отрезка того же самого интервала апериодического управления относительно большие изменения сигнала управления, ожидаемые в начале каждого интервала апериодического управления, не должны влиять на ускорение преобразователя 18 за время, которое зависит от постоянной времени усилителя. В частности, изменение тока, обусловленное шаговым изменением сигнала управления, должно быть, вообще говоря, экспоненциальной функцией от времени.
Для коррекции этого экспоненциального изменения определено, что значение тока, поступающего в микропроцессор в начале первого временного отрезка каждого интервала апериодического управления, должно быть значением тока, который был определен сигналом управления для последнего временного отрезка предшествующего интервала апериодического управления или для последнего временного отрезка при управлении скоростью преобразователя 18. Этот ток будет соответствовать номинальному значению сигнала управления по соотношению, выраженному уравнением (2). Такое номинальное значение вычисляется на первом временном отрезке каждого интервала апериодического управления (шаг 134) и используется в определении интервального корректирующего значения на всех временных отрезках интервала апериодического управления.
В частности, номинальное значение сигнала управления вычитается из значения сигнала управления при апериодическом управлении, определенного на первом отрезке каждого интервала апериодического управления для достижения изменения сигнала управления, которое соответствует разнице между идеальными токами при апериодическом управлении для двух последовательных интервалов апериодического управления или между последним значением тока управления скоростью и идеальным значением тока при апериодическом управлении для первого интервала апериодического управления. Соответственно, компенсация может быть выполнена перемножением разницы между значением сигнала коррекции при апериодическом управлении и номинальным значением сигнала управления на дискретную временную интервальную функцию, которая соответствует экспоненциальному спаду тока катушки привода от одного значения до другого, т.е. дискретное представление функции
K(t) = K(O)exp(-t/Tc), (11)
где Tc - постоянная времени усилителя мощности, а выбираемая K(O) должна быть весовым коэффициентом, при котором площадь под кривой, выраженной уравнением (11), с продолжительностью временного отрезка от t - 0 до t = T интервала апериодического управления, равна K(O)T.
Таким образом, на первом временном отрезке каждого интервала апериодического управления генерируется временная интервальная коррекция
ΔU = K (O) [U N) - Unom] (12)
на шаге 136 и добавляется к значению сигнала управления при апериодическом управлении на шаге 92 для выдачи на усилитель мощности 36 в течение первого временного отрезка каждого интервала апериодического управления.
На последующих временных отрезках каждого интервала апериодического управления уравнение (11) используется для определения второго интервального корректирующего значения, так же как описано выше. В частности, так как временные отрезки интервалов апериодического управления имеют одинаковую длительность T, то корректирующие значения второго временного отрезка, вычисленные на шаге 132, могут быть найдены оценкой экспоненциальной функции по уравнению (11) на множестве последовательных временных отрезков T. Таким образом, корректирующие значения второго временного отрезка для временных отрезков интервалов апериодического управления в общем случае определяются как
ΔU2 = K (O) [U N) - Unom], (13)
где K(Q) = K(O)exp(-QT/Tc).
Эти корректирующие значения для временных интервалов добавляются (шаг 138) к корректирующим значениям первого временного отрезка, вычисленным на шаге 102, для получения временных интервальных корректирующих значений, которые совместно с каждым другим и со значениями управляющего сигнала при апериодическом управлении, заставляют преобразователь 18 позиционироваться на заданную дорожку так, чтобы точно соответствовать идеальному апериодическому позиционированию.
При этом очевидно, что предлагаемое изобретение обеспечивает достижение целей и преимуществ, упомянутых и присущих ему. Хотя конкретные примеры осуществления были описаны с целью раскрытия изобретения, однако могут быть сделаны многочисленные изменения в рамках изобретения, которое раскрыто и определено в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСЛАБЛЕНИЕ ФАЗОВОЙ МНОГОЛУЧЕВОСТИ | 2005 |
|
RU2407025C2 |
| СИСТЕМА НА ОПТИЧЕСКИХ ДИСКАХ | 1996 |
|
RU2181217C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ЭНЕРГОПОТРЕБЛЕНИЯ ДИСКОВОДОВ ВЫЧИСЛИТЕЛЬНЫХ МАШИН | 1995 |
|
RU2146395C1 |
| СПОСОБ И УСТРОЙСТВО ВОСПРОИЗВЕДЕНИЯ/ЗАПИСИ ИНФОРМАЦИИ В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ И НОСИТЕЛЬ ИНФОРМАЦИИ | 1999 |
|
RU2244346C2 |
| СИСТЕМА ЗАПИСИ СЕРВОДАННЫХ ДЛЯ ИСПОЛЬЗОВАНИЯ В НАКОПИТЕЛЯХ НА ДИСКАХ | 1995 |
|
RU2141691C1 |
| СПОСОБ ЗАПИСИ ДАННЫХ НА НОСИТЕЛЬ ЗАПИСИ | 2003 |
|
RU2303822C2 |
| НОСИТЕЛЬ ЗАПИСИ И СПОСОБ ЗАПИСИ НА НОСИТЕЛЬ ЗАПИСИ | 2003 |
|
RU2305330C2 |
| СТАНОК ДЛЯ СОЗДАНИЯ ВОЛНООБРАЗНОГО ФАЦЕТА | 1999 |
|
RU2180282C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ УДАЛЕННОГО УСТРОЙСТВА | 2004 |
|
RU2357267C2 |
| РЕГУЛИРУЕМЫЙ ИНВЕРТИРУЮЩИЙ ИСТОЧНИК ПИТАНИЯ | 1993 |
|
RU2167483C2 |



Изобретение предназначено для использования в дисковых накопителях данных. При позиционировании преобразователя дисковода на заданную дорожку в течении заданного промежутка времени последний разделяется на два интервала апериодического управления, каждый из которых делится на несколько временных отрезков, в каждом из которых измеряется положение преобразователя по отношению к заданной дорожке и измеряется принятое значение скорости движения преобразователя или оно определяется из последовательных положений преобразователя. В течение первого отрезка времени каждого интервала апериодического управления определяется значение управляющего сигнала на основе идеального апериодического позиционирования преобразователя на заданную дорожку и выдается на усилитель мощности, который приводит в действие привод для радиального перемещения преобразователя относительно диска. В последующих отрезках каждого интервала апериодического управления значение коррекции управляющего сигнала, определенное по отношению к разнице между требуемой скоростью, определенной из значения управляющего сигнала при апериодическом управлении, и реальной скоростью преобразователя, добавляется к значению управляющего сигнала при апериодическом управлении и выдается на усилитель мощности. Второй сигнал коррекции может быть добавлен к значению управляющего сигнала при апериодическом управлении для коррекции в случае большой постоянной времени усилителя мощности. Способ обеспечивают сокращение времени доступа к дорожке дисковода.. 2 з.п.ф-лы, 6 ил.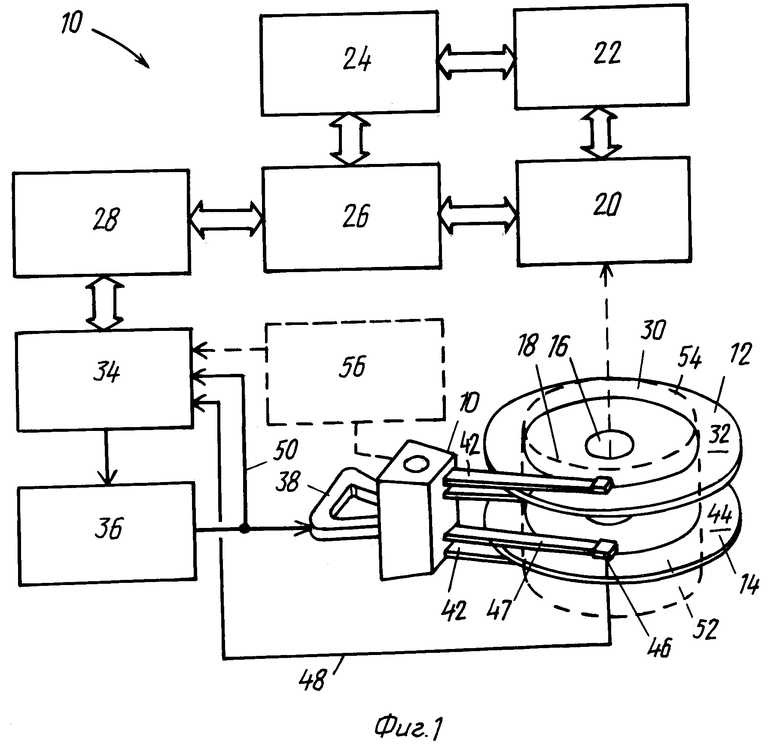
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| EP, A, 0335650, заявка, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| EP, A, 0299084, заявка, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| JP, A, 04321982, заявка, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
