Изобретение относится к области автоматизации технологических процессов, в которых необходимо определенное соотношение скоростей вращения приводных валов (прокатные станы, бумагоделательные машины и т.д.).
Известны сельсины, посредством которых осуществляют контроль взаимного положения валов. Однако измерение угла рассогласования при этом выполняют с недостаточной точностью.
Наиболее близким по технической сущности является "Датчик мгновенных значений углов рассогласования вращающихся валов" (патент РФ на изобретение 2135969, приоритет от 04.10.96.). Здесь на всех валах располагают растровые диски и по два неподвижных относительно станины формирователя - электрических импульсов начала счета и импульсов мгновенных положений валов (счетных импульсов). При вращении, в соответствии с описанным алгоритмом, постоянно сравнивают номера импульсов мгновенных положений ведущего вала с номерами импульсов положений данного ведомого валов. В результате с высокой точностью ("плюс, минус один импульс") определяют взаимное положение валов (углов рассогласования) в любой момент времени.
Однако данное устройство предназначено для контроля только мгновенных положений вращающихся валов по отношению к одному - ведущему валу, вращающемуся с той же частотой. Кроме этого, в принятом за прототип устройстве, при формировании корректирующего импульса, не учитывают величину скорости и ускорение вращения вала на этот момент.
Технический результат данного предложения - повышение точности коррекции взаимных положений вращающихся валов, в том числе и с отличными друг от друга скоростями, за счет использования импульсных задатчиков скорости вращения валов и учета прогнозируемых для момента начала действия корректирующего импульса значений угла рассогласования, угловой скорости и углового ускорения вала.
Поставленной цели достигают:
- использованием импульсных задатчиков скорости вращения каждого последующего вала;
- текущим контролем, посредством блока расчета мгновенных значений угла рассогласования, мгновенных положений данного вала по отношению к управляющим импульсам задатчика, установленного на предыдущем валу;
- использованием, кроме этого, для каждого вращающегося вала:
блока прогноза мгновенных значений угла рассогласования;
электронного формирователя импульсов начала счета импульсов положений задатчика скорости вращения вала;
блока коррекции прогноза величины угла рассогласования;
блока расчета скорости вращения вала;
блока прогноза скорости вращения вала;
блока расчета ускорения;
блока прогноза величины ускорения,
- учетом времени запаздывания при формировании корректирующих импульсов.
Блок-схема "Устройства..." представлена на чертеже. Здесь 1, 2, 3 - фрагмент технологической линии проката, представляющий три вращающихся вала с тремя отдельными электроприводами (на чертеже показана блок-схема устройства коррекции только для вала 2); 4 - растровый диск задатчика скорости вращения вала 2; 5 - формирователь импульсов положений задатчика скорости вращения вала 2; 6 - электронный формирователь импульсов начала счета импульсов положений задатчика скорости вращения вала 2; 7 - растровый диск формирователя импульсов положений вала 2; 8 - формирователь импульсов положений вала 2; 9 - формирователь импульсов начала счета импульсов положений вала 2; 10 - таймер; 11 - блок расчета мгновенных значений угла рассогласования положений вала 2 по отношению к растровому диску 4 задатчика скорости вращения этого вала; 12 - блок прогноза мгновенных значений указанных углов рассогласования; 13 - блок расчета скорости вращения вала 2; 14 - блок прогноза скорости вращения вала 2; 15 - блок расчета величины ускорений вала 2; 16 - блок прогноза величины ускорений вала 2; 17 - блок коррекции прогноза величины угла рассогласования; 18 - основной процессор для вала 2; 19 - блок управления двигателем электропривода вала 2; 20 - блок возврата устройства в исходное состояние.
В процессе наладки и эксплуатации линий проката возникает необходимость изменить степень натяжения прокатываемого материала, учесть проскальзывание и т.д. Для этого необходим контроль скоростей вращения, отличающихся на доли процента. Степень отличия определяется конкретным технологическими условиями.
К примеру, необходимо, чтобы последующий вал вращался со скоростью на 0,2% больше, чем предыдущий (при скорости вращения предыдущего вала, например, 100 оборотов в минуту, последующий вал должен вращаться со скоростью 100,2 оборота в минуту). Для решения этой задачи используют импульсные задатчики скорости вращения каждого последующего вала.
Для вала 2 (чертеж) он представляет собой вращающийся с валом 1 дополнительный растровый диск 4 и неподвижный относительно станины формирователь импульсов положений этого диска - 5. Посредством блока 5 за один полный оборот вала 1 формируют, например, 501 импульс (данное число, как будет показано далее, позволяет выполнить условие - скорость вращения последующего вала на 0,2% больше, чем предыдущего). Однако импульсы начала их счета формируют на выходе электронного формирователя 6 всякий раз после следования 500 постоянно поступающих на вход блока 6 с блока 5 импульсов положений растрового диска задатчика скорости вращения вала 2.
Вместе с валом 2 вращается растровый диск 7, при полном обороте которого посредством неподвижного формирователя 8 импульсов положений вала 2 получают только 500 импульсов (на один меньше, чем при полном обороте вала 1). Начало счета импульсов положений вала 2 происходит по сигналам неподвижного формирователя 9.
Сигналы начала счета импульсов положения задатчика скорости вращения вала 2 посредством электронного формирователя импульсов 6 осуществляют следующим образом. При запуске "Устройства..." или после очередной коррекции частоты вращения вала 2 первый импульс начала счета на выходе блока 6 получают одновременно с первым импульсом начала счета импульсов положений вала 2 на выходе неподвижного формирователя 9. Следующие импульсы начала счета, как уже указывалось, формируют посредством блока 6 через каждые 500 импульсов, поступающих на его вход с блока 5.
Таким образом, за время формирования 500 импульсов вал 2 поворачивается на 360o, а вал 1 - только на 500/501 часть полного оборота т.е. на 0,2% меньше. (Очевидно, чтобы последующий вал вращался быстрее предыдущего на 0,4% при полном обороте вала 1, формируют, например, 251 импульс, а вала 2 - только 250 и т.д. Если необходимо, чтобы скорость вращения последующего вала была меньше скорости вращения вала предыдущего - соотношение числа импульсов противоположное).
В "Устройстве..." используют таймер 10.
Вход блока 11 расчета мгновенных значений угла рассогласования соединяют с выходами формирователя импульсов положений задатчика скорости вращения вала 2-5, электронного формирователя 6 импульсов начала счета импульсов положений задатчика скорости вращения, формирователя импульсов положений вала 2-8; формирователя импульсов начала счета импульсов положений вала 9 и таймера 10. Посредством блока 11 сравнивают номера импульсов, поступающих с формирователей 5 и 8 импульсов положений обоих валов (первого и второго) и отмечают соответствующие моменты времени. Если указанные номера одинаковы, то в данный момент скорость вращения второго вала соответствует заданной. Разность номеров импульсов соответствует величине и знаку угла рассогласования в данный момент времени.
Информацию о мгновенных значениях углов рассогласования и временные отметки с выхода блока 11 подают на вход блока 12 прогноза мгновенных значений углов рассогласования вала 2. Используя выбранный метод экстраполяции, по результатам последних n измерений угла и соответствующим временным отметкам непрерывно выполняют прогноз величины угла рассогласования в течение предстоящего временного интервала длительностью t (метод экстраполяции, число n и длительность t зависят от конкретного технологического процесса).
Вход блока 13 расчета скорости вращения вала соединяют с формирователем 8 импульсов положения вала 2 и таймером 10. Посредством блока 13 определяют текущие значения скорости вращения вала 2
где N - число импульсов положений за время полного оборота вала 2 (например, 500);
m - постоянное число импульсов положения вала 2, поступающих последними на вход блока 13 (значение m определяется конкретными условиями, например, m=50); угол поворота вала 2 за время формирования последних m импульсов его положений;
угол поворота вала 2 за время формирования последних m импульсов его положений;
Δt - длительность временного интервала, в течение которого на вход блока 12 поступает m (например, 50) импульсов положения вала 2.
На вход блока 14 прогноза скорости вращения вала поступает информация с блока 13 о текущих значениях скорости вращения вала 2. По последним l текущим значениям скорости и соответствующим временным отметка таймера, посредством выбранного метода экстраполяции, выполняют прогноз скорости вращения вала на предстоящий временной отрезок длительностью t1.
На вход блока 15 расчета ускорений, также как и на вход блока 14, поступает информация с блока 13 о средних скоростях вращения вала за время формирования последних m импульсов и временные отметки таймера 10. Если, например, m=50, то текущие значения ускорения вращения вала
где v1-51, v2-52, v3-53 - средние скорости вращения за время формирования 1-51, 2-52, 3-53 импульсов положения вала 2;
t51, t52, t53 - моменты формирования соответственно 51, 52, 53 и т.д. импульсов положения вала 2.
На вход блока 16 прогноза величины ускорения с выхода блока 15 одновременно поступает информация о значениях a1 и t52, потом а2 и t53 и т.д. Посредством выбранного метода экстраполяции по последним k значениям аk и tk выполняют прогнозирование ускорения вращения вала на тот же, что и для скорости, предстоящий временной отрезок длительностью t1.
Время t учитывает запаздывание от момента подачи сигнала на формирование корректирующего импульса до начала его действия; длительность корректирующего импульса и инерционные свойства электропривода данного вала.
Время t1 учитывает только запаздывание от момента подачи сигнала на формирование корректирующего импульса до начала его действия. Поскольку t>t1, становится возможным выполнить коррекцию угла рассогласования вала до момента превышения допустимых значений.
Для этого дополнительно используют блок 17 коррекции прогноза величины угла рассогласования. Вход блока 17 соединен с выходом блока расчета мгновенных значений угла рассогласования 11. В отличие от блока 12, посредством блока 17 постоянно выполняют прогноз значения угла рассогласования в конце предстоящего временного интервала длительностью t1 - для момента начала действия корректирующего импульса (т.е. за счет блока 17 значения угла рассогласования прогнозируют для того же момента времени, что скорость и ускорение вращения вала).
Как только посредством блока 12 фиксируют - через t секунд значение контролируемого параметра (угла рассогласования) окажется больше допустимого, на выходе блока 12 формируют управляющий импульс. Его подают на вход блоков 17 (коррекции прогноза величины угла рассогласования), 14 (прогноза скорости вращения вала) и 16 (блока прогноза величины ускорения).
Вследствие этого с выходов указанных блоков прогноза на вход основного процессора 18 поступает информация о мгновенных значениях
- угла рассогласования вала 2 по отношению к сигналу задатчика скорости вращения данного вала;
- скорости вращения вала 2;
- ускорения вращения вала 2
в конце временного интервала t1 - на момент начала действия корректирующего импульса.
Посредством основного процессора 18, учитывая указанные результаты прогноза, а также инерционные свойства данного электропривода, формируют соответствующей амплитуды и длительности корректирующий импульс, который подают на вход блока управления электродвигателем (блок 19).
После действия корректирующего импульса, с выхода блока 18 на вход блока 20 возврата устройства в исходное состояние, поступает сигнал, в результате чего на выходе блока 20 формируют сигнал сброса, поступающий на вход блоков 6, 10, 11, 13, 15 и 18. В результате блоки "обнуляются" и при последующем формировании первого импульса начала счета импульсов положения последующего вала (посредством формирователя 9) одновременно на выходе блока 6 снова получают первый импульс начала счета импульсов положения задатчика скорости вращения данного вала. После этого процесс функционирования устройства аналогичен описанному.
Число импульсов положений валов 1 и 2 при их повороте на 360o, периодичность фиксации мгновенных значений углов рассогласования; число n последних значений углов рассогласований, по которым выполняют прогноз изменения этого угла; число m импульсов положений для определения текущих значений скорости и ускорения вращения вала; число l значений скорости вращения и число k значений ускорения, по которым выполняют прогноз их значений на предстоящий временной интервал длительностью t1; методы экстраполяции указанных величин посредством соответствующих блоков; длительность временных интервалов, на которых выполняют начальный прогноз изменения угла рассогласования - t и длительность временного интервала - t1, на которых делают уточняющий прогноз угла рассогласования и прогноз значений скорости и ускорения, определяются конкретными условиями и решаются программными средствами.
Изобретение относится к автоматизации технологических процессов, в которых необходимо определенное соотношение скоростей вращения приводных валов (прокатные станы, бумагоделательные машины и т.д.). Сущность изобретения заключается в том, что вследствие контроля мгновенных значений углов рассогласования - угла между положением, определяемым задатчиком скорости, и действительным положением вала выполняют прогноз величины этого угла в конце будущего временного интервала. Как только прогнозируемое значение угла в пределах данного временного интервала прогноза превысит допустимое, на вход основного процессора подают результаты прогноза величин угла рассогласования, скорости вращения вала, ускорения вращения вала на момент начала действия корректирующего импульса в конце интервала прогноза меньшей длительности t. Вследствие того, что t1<t, коррекцию скорости вращения вала выполняют до момента превышения углом рассогласования допустимого значения. Периодичность фиксации мгновенных значений углов рассогласования, число последних на текущий момент значений углов рассогласований, импульсов положений для определения текущих значений скорости и ускорения вращения вала, значений скоростей вращения и ускорения для определения их значений на предстоящий временной интервал, а также методы экстраполяции в соответствующих блоках прогноза определяются конкретными технологическими условиями и решаются программными средствами. Технический результат изобретения состоит в повышении точности коррекции взаимных положений вращающихся валов. 1 ил.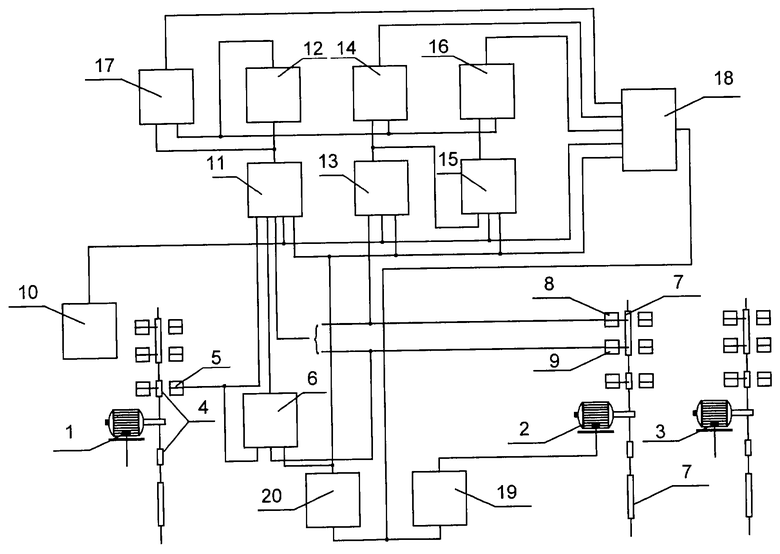
Устройство автоматической коррекции взаимных положений вращающихся валов для прокатных и аналогичных технологий, содержащее закрепленные на каждом валу растровые диски, неподвижные формирователи счетных импульсов - пронумерованных импульсов положения данного вала, и неподвижные формирователи импульсов начала счета, отличающееся тем, что оно содержит импульсные задатчики скорости вращения последующего вала, представляющие расположенный на предыдущем валу дополнительно растровый диск и неподвижный формирователь импульсов его положений, выход этого формирователя соединен со входом электронного формирователя импульсов начала счета импульсов положений растрового диска задатчика скорости вращения, число импульсов положений при полном обороте этого растрового диска больше числа импульсов положений при полном обороте растрового диска на последующем валу, при этом первый импульс начала счета на выходе электронного формирователя получен одновременно с первым импульсом на выходе формирователя импульсов начала счета при вращении последующего вала, далее импульсы начала счета на выходах обоих формирователей получены при следовании на их входы одинакового числа импульсов положений соответствующих валов, причем вход блока расчета мгновенных значений угла рассогласования соединен с выходами блока формирователя импульсов положений задатчика скорости вращения вала, блока электронного формирователя импульсов начала их счета, блока формирователя импульсов положений последующего вала, блока формирователя импульсов начала счета импульсов положений последующего вала и таймера, выход блока расчета мгновенных значений угла рассогласования соединен со входом блока прогноза мгновенных значений этих углов, экстраполирующим величину угла в конце временного интервала длительностью t, вход блока расчета скорости вращения вала соединен с выходами блока формирователя импульсов положений последующего вала и таймера, выход блока расчета скорости вращения соединен со входом блока прогноза скорости вращения, вход блока расчета ускорения вращения того же вала соединен с выходами блока расчета скорости его вращения и таймера, выход блока расчета ускорений соединен со входом блока прогноза величины ускорений, причем в блоках прогноза скорости и ускорения вращения вала методами экстраполяции определены их мгновенные значения в конце будущего временного интервала длительностью t1>t, выход блока прогноза мгновенных значений углов рассогласования и выход блока расчета мгновенных значений угла рассогласования соединен со входами блока коррекции прогноза величины угла рассогласования на предстоящий временной период также длительностью t1, выход блока коррекции прогноза соединен со входами блока прогноза скорости вращения и блока прогноза величины ускорений вала, а выходы блоков коррекции прогноза величины угла рассогласования, прогноза скорости вращения, прогноза величины ускорения и таймера соединены со входами основного процессора для последующего вала, выход основного процессора соединен со входами блока управления двигателем электропривода последующего вала и блока возврата устройства в исходное состояние, выход блока управления двигателем соединен с двигателем, а выход блока возврата устройства в исходное состояние соединен со входами блока электронного формирователя импульсов начала счета импульсов положений задатчика скорости вращения вала, блока расчета мгновенных значений угла рассогласования, блока расчета скорости вращения вала, блока расчета величины ускорений и основного процессора, при этом число импульсов положений при полном обороте дополнительного растрового диска импульсного задатчика скорости вращения последующего вала и число импульсов положений при повороте на 360° самого последующего вала, а также периодичность фиксации мгновенных значений углов рассогласования, число последних значений углов рассогласования, по которым выполнен прогноз его величины, число импульсов положений для определения текущих значений скорости и ускорения вращения вала, методы экстраполяции, используемые в указанных блоках прогноза, длительность временных интервалов прогноза t и t1 определены конкретными условиями.
| ДАТЧИК МГНОВЕННЫХ ЗНАЧЕНИЙ УГЛОВ РАССОГЛАСОВАНИЯ ВРАЩАЮЩИХСЯ ВАЛОВ | 1996 |
|
RU2135969C1 |
| RU 9510332 A1, 10.03.1997 | |||
| GB 1300989, 29.12.1998 | |||
| УСТРОЙСТВО КОПИРУЮЩЕЕ РЕЖУЩЕГО АППАРАТА ЖАТКИ ДЛЯ УБОРКИ СОИ | 2013 |
|
RU2530505C1 |
| DE 19825388 A1, 17.12.1998. | |||

