Изобретение относится к измерительной технике, в частности к определению технического состояния путем измерения параметров, отражающих давление в цилиндрах поршневых двигателей внутреннего сгорания (ДВС) в эксплуатационных условиях.
Известен способ определения технического состояния ДВС [1] путем определения индикаторной диаграммы, заключающийся в том, что измеряют изменение кинетической энергии коленчатого вала в зависимости от изменения мгновенных значений скорости вращения в течение такта сжатия и сравнивают ее с эталонной зависимостью для исправного нормального двигателя. По известному уравнению связи определяют давление в цилиндре.
Недостатками известного способа являются сложность, вызванная необходимостью установки в разрыв силовой цепи измерителей энергии, низкая точность классификации технического состояния ввиду невозможности оперативного использования знаний об изменении измеряемого процесса в зонах нормального, допустимого и предельного состояний двигателя.
Известен способ определения технического состояния ДВС [2], выбранный прототипом предлагаемого способа, и заключающийся в том, что прокручивают двигатель на частоте вращения ниже минимальной холостого хода, непрерывно измеряют угловое ускорение коленчатого вала, определяют моменты перехода этого ускорения через ноль с минуса на плюс, находят угловые метки, ближайшие к указанным моментам перехода, которые принимают за условные верхние мертвые точки цилиндров, затем на частоте вращения, при которой предполагается определение индикаторных диаграмм цилиндров, прокручивают двигатель и измеряют амплитуду неуравновешенной инерционной составляющей углового ускорения коленчатого вала, полностью нагружают двигатель на этой частоте и непрерывно измеряют угловое ускорение коленчатого вала, идентифицируют один из цилиндров по моменту впрыскивания топлива, генерируют с привязкой по углу поворота коленчатого вала первую функцию неуравновешенной инерционной составляющей углового ускорения с амплитудой, равной измеренной, а также вторую функцию, связывающую силы, действующие в кривошипно-шатунной механизме, с крутящим моментом двигателя и в угловом интервале, равном или меньшем такта двигателя до и после условной верхней мертвой точки контролируемого цилиндра, непрерывно в фазе вычитают из измеренного ускорения его значение в условной мертвой точке, аналогично вычитают первую функцию, находят отношение полученной разности и второй функции, полученную зависимость от угла поворота или от времени принимают за косвенную индикаторную диаграмму цилиндра двигателя, сравнивают эту диаграмму и ее числовые показатели с эталонными, измеренными предварительно и соотнесенными с аналогичными величинами для давлений в цилиндре исправного нормального двигателя, а также с предварительно полученными зависимостями изменения этих величин при изменении состояния двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние двигателя.
Недостатками известного способа является сложность, вызванная необходимостью генерирования функций, выполнения ряда изменений и вычислительных операций при различных режимах работы ДВС и связанная с этим низкая точность классификации технического состояния ввиду накопления погрешностей при получении косвенной индикаторной диаграммы.
Известна система для регистрации и обработки индикаторных диаграмм [3], содержащая датчики давления в цилиндрах с усилителями и аналого-цифровыми преобразователями, датчик угловых меток с отметчиком оборота, блок управления, пороговый триггер, блок ручного управления, генератор тактовых импульсов, распределитель тактов, задатчик алгоритмов обработки, формирователь команд обработки, коммутатор, вычислительный блок, схему формирования импульсов коррекции, приемник, электронно-вычислительную машину, цифровой индикатор и блок вывода, причем выходы датчика угловых меток подключены соответственно к первому и второму входам блока управления, третий вход которого соединен через пороговый триггер с выходом одного из усилителей, четвертый вход блока управления соединен с блоком ручного управления, пятый вход подключен через приемник к электронно-вычислительной машине.
Первый выход блока управления подключен к первому входу цифрового индикатора и первому входу блока вывода, выход которого связан с электронно-вычислительной машиной, а второй выход блока управления соединен с управляющими входами аналого-цифровых преобразователей, третий выход блока управления соединен с первым входом вычислительного блока, четвертый выход подключен к корректирующим входам усилителей через схему формирования импульсов коррекции и к первому входу формирователя команд обработки, второй вход которого соединен через задатчик алгоритмов обработки с выходом приемника, а третий вход - с первым выходом вычислительного блока.
Второй выход блока управления соединен с первым входом распределителя тактов, второй вход которого подключен к генератору тактовых импульсов, а выход распределителя тактов соединен с четвертым входом формирователя команд обработки и управляющим входом коммутатора, остальные входы которого подключены к выходам аналого-цифровым преобразователей, выход коммутатора соединен с вторыми входами блока вывода и вычислительного блока, третий вход которого подключен к выходу формирователя команд обработки, а четвертый вход - к первому выходу блока управления, второй выход вычислительного блока соединен с вторым входом цифрового индикатора и третьим входом блока вывода.
Недостатком указанной системы является сложность ее применения в условиях эксплуатации, обусловленная необходимость использования датчиков давления в цилиндрах двигателя. Это возможно осуществить только установкой взамен штатной специальной головки блока цилиндров с каналами для установки датчиков давления. Кроме того, для известной системы характерна низкая точность и высокая трудоемкость при идентификации измеренных данных и отнесении двигателя к определенному классу состояний, так как эти операции осуществляются вручную.
Известна экспертная система для определения технического состояния двигателей внутреннего сгорания [2], являющаяся прототипом, содержащая датчики давления в цилиндрах с усилителями и аналого-цифровыми преобразователями, датчик угловых меток с отметчиком оборота, блок управления, пороговый триггер, блок ручного управления, приемник, электронно-вычислительную машину, цифровой индикатор, блок вывода, генератор тактовых импульсов, распределитель тактов, задатчик алгоритмов обработки, формирователь команд обработки, коммутатор, вычислительный блок, схему формирования импульсов коррекции, причем выходы датчика угловых меток подключены соответственно к первому и второму входам блока управления, третий вход которого соединен через пороговый триггер с выходом одного из усилителей.
Четвертый вход блока управления соединен с блоком ручного управления, пятый вход подключен через приемник к электронно-вычислительной машине, первый выход блока управления подключен к первому входу цифрового индикатора и первому входу блока вывода, выход которого связан с электронно-вычислительной машиной, а второй выход блока управления соединен с управляющими входами аналого-цифровых преобразователей.
Третий выход блока управления соединен с первым входом вычислительного блока, четвертый выход подключен к корректирующим входам усилителей через схему формирования импульсов коррекции и к первому входу формирователя команд обработки, второй вход которого соединен через задатчик алгоритмов обработки с выходом приемника, а третий вход - с первым входом вычислительного блока, второй выход блока управления соединен с первым входом распределителя тактов, второй вход которого подключен к выходу генератора тактовых импульсов, а выход распределителя тактов соединен с четвертым входом формирователя команд обработки и управляющим входом коммутатора, остальные входы которого подключены к выходам аналого-цифровых преобразователей, причем выход коммутатора соединен с вторыми входами блока вывода и вычислительного блока, третий вход которого подключен к выходу формирователя команд обработки, а четвертый вход - к первому выходу блока управления, второй выход вычислительного блока соединен с вторым входом блока цифрового индикатора и третьим входом блока вывода.
Кроме того, вычислительный блок содержит схему выбора экстремума, измеритель периода, цифровой дифференциатор, блок вычислений среднего индикаторного давления и блок регистров параметров, причем третий вход вычислительного блока является первым управляющим входом блока регистров и первым входом схемы выбора экстремума, цифрового дифференциатора, измерителя периода и блока вычисления среднего индикаторного давления, выходы которых, а также первый и второй входы вычислительного блока подсоединены к информационным входам блока регистров, при этом второй вход вычислительного блока является вторым входом схемы выбора экстремума, цифрового дифференциатора и блока вычисления среднего индикаторного давления, третьим входом которых является выход блоков регистров, четвертый вход блока вычисления среднего индикаторного давления является первым входом вычислительного блока, а выход цифрового дифференциатора соединен с четвертым входом схемы выбора экстремума, второй выход которой является первым выходом вычислительного блока, второй выход и четвертый вход которого являются соответственно выходом и вторым управляющим входом блока регистров.
Кроме того система содержит датчик угловых меток-зубьев, формирователь импульсов зубьев, элемент ИЛИ цикла, датчик впрыска топлива, усилитель впрыска, второй пороговый триггер, двойной цифровой дифференциатор, цифровой дискриминатор знака, измеритель экстремума ускорений, запоминающее устройство ускорений, арифметическое устройство, генератор функций, блок идентификации, задатчик моделей процессов, блок классификации состояний, задатчик функций изменения параметров, причем выход первого порогового триггера соединен с первым входом элемента ИЛИ цикла, выход которого соединен с третьим входом блока управления.
Датчик впрыска через последовательно соединенные усилитель впрыска и второй пороговый триггер подключен к второму входу элемента ИЛИ цикла, а датчик угловых меток-зубьев через формирователь импульсов зубьев соединен с шестым входом блока управления, пятый выход которого соединен с входом двойного цифрового дифференциатора, выход которого связан с первыми входами цифрового дискриминатора знака, измерителя экстремума ускорений и запоминающего устройства ускорений, выход цифрового дискриминатора знака подключен к седьмому входу блока управления, а выходы измерителя экстремума ускорений и запоминающегося устройства ускорений соединены соответственно с первым и вторым входами арифметического устройства, вторые входы цифрового дискриминатора знака, измерителя экстремума ускорений, запоминающего устройства ускорений, третий вход арифметического устройства, первые входы генератора функций, блоков идентификации и классификации состояний соединены с первым выходом блока управления, а третьи входы измерителя экстремумов ускорений, запоминающего устройства ускорений, четвертый вход арифметического устройства, вторые входы генератора функций, блоков идентификации и классификации состояний, а также первые входы задатчика моделей процессов и задатчика функций изменения параметров соединены с выходом формирователя команд обработки, причем пятый вход арифметического устройства соединен с выходом генератора функций, а выход -- с вторыми входами вычислительного блока и блока вывода.
Третий вход блока идентификации, а также вторые входы задатчика моделей процессов и задатчика функций изменения параметров соединены с выходом вычислительного блока, четвертый вход - с выходом задатчика моделей процессов, а выход - с третьим входом блока классификации состояний, четвертый вход которого соединен с выходом задатчика функций изменения параметров, а выход - с четвертый входом блока вывода, причем шестой выход блока управления соединен с вторым управляющим входом коммутатора.
Блок управления содержит формирователи сигналов угловых меток, оборота, начала цикла и команд управления, счетчик текущего угла, избирательный блок, делитель периода и первый элемент И, причем к первому входу первого элемента И подключен первый выход формирователя команд управления, третий и четвертый входы которого являются соответственно четвертым и пятым входами блока управления, первый вход которого является входом формирователя сигналов угловых меток, а второй вход является входом формирователя сигналов оборота, при этом второй вход формирователя сигналов начала цикла является третьим входом блока управления, а выход подключен через счетчик текущего угла к входу избирательного блока и первому входу формирователя команд управления, причем выход счетчика текущего угла является третьим выходом блока управления, выход делителя периода соединен с третьим входом формирователя сигналов начала цикла, вторым входом счетчика текущего угла, вторым входом формирователя команд управления и вторым входом первого элемента И, первый вход которого подсоединен к первому выходу формирователя команд управления, а выход первого элемента И является вторым выходом блока управления, первым и четвертым выходами которого являются соответственно второй выход формирователя команд управления и выход избирательного блока.
Кроме того, в блоке управления имеются два элемента ИЛИ и второй элемент И, причем выход формирователя сигналов угловых меток соединен с первым входом первого элемента ИЛИ, выход которого подключен к входу делителя периода и первому входу второго элемента И, второй вход которого соединен с третьим выходом формирователя команд управления, причем выход формирователя сигналов оборота связан с первым входом второго элемента ИЛИ, выход которого подключен к первому входу формирователя сигналов начала цикла, выход второго элемента И и третий выход формирователя команд обработки являются соответственно пятым и шестым выходами блока управления, а вторые входы первого и второго элемента ИЛИ являются соответственно шестым и седьмым входами блока управления.
Недостатком известной системы является сложность и связанная с этим низкая точность при экспертизе двигателя в эксплуатационных условиях, вызванная необходимостью иметь в своем составе генератор функций с параметрами, которые должны оперативно изменяться в соответствии с изменением текущего значения частоты вращения коленчатого вала, а также иметь устройство ввода измерительной информации с датчиков в ЭВМ, управляющее, вычислительное и запоминающее устройства, которые обеспечивали бы оперативное получение информации о состоянии двигателя при проведении ряда измерений, осуществляемых на различных режимах его работы.
Цель заявляемого технического решения - упрощение, снижение трудоемкости и повышение точности классификации при определении технического состояния двигателей внутреннего сгорания в эксплуатационных условиях.
Предложенное техническое решение по сравнению с прототипом позволяет в эксплуатационных условиях упростить и значительно снизить трудоемкость экспертизы технического состояния двигателя путем косвенного определения параметров индикаторных диаграмм цилиндров и других показателей технического состояния ДВС за счет исключения необходимости генерирования функций, выполнения ряда измерений и вычислительных операций при различных режимах работы ДВС.
Кроме того, предложенное техническое решение позволяет увеличить глубину экспертизы (расширить поиск мест неисправностей) за счет более полного использования косвенных признаков технического состояния. По сравнению с базовым объектом - индицированием цилиндров по косвенным индикаторным диаграммам трудоемкость определения технического состояния двигателя снижается в 3-5 раз.
Поставленная цель в способе достигается за счет того, что многократно разгоняют двигатель без нагрузки от минимальной частоты вращения холостого хода до максимальной, непрерывно измеряют средние значения в цикле работы двигателя угловой скорости, углового ускорения и динамической мощности, при достижении двигателем заданной заранее частоты вращения измеряют амплитудный спектр динамической мощности, находят среднее значение этого спектра мощности по множеству разгонов, аналогично измеряют амплитудные спектры динамической мощности при достижении двигателем частот вращения максимального крутящего момента, номинальной, начала срабатывания регулятора скорости, максимальной холостого хода и промежуточных, получают зависимость этих спектров от частоты вращения, аналогично получают зависимость амплитудных спектров динамической мощности при многократных выбегах двигателя без подачи топлива от максимальной частоты вращения до минимальной.
Сравнивают полученные зависимости спектров динамической мощности в разгоне и выбеге и их числовые показатели с эталонными, измеренными предварительно и соотнесенными с давлением в цилиндрах исправного нормального двигателя, а также с предварительно полученными зависимостями изменения этих величин при изменении состояния двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние двигателя, сравнивают амплитуды гармоник амплитудного спектра динамической мощности, кратные частотам переколебаний регулятора (0,2 - 0,3 - гармоникам частоты вращения), измеренного при частоте начала срабатывания регулятора, с предварительно полученными эталонным значением и значениями этих амплитуд при изменении состояния регулятора скорости от нормального до допустимого и предельного и по степени их близости классифицируют состояние регулятора скорости, в стационарном режиме полной нагрузки при заданной заранее частоте вращения коленчатого вала, непрерывно измеряют угловые скорость, ускорение и амплитудные спектры мгновенных значений углового ускорения коленчатого вала, усредняют спектры по множеству циклов работы двигателя, измеряют под нагрузкой эти спектры при частотах вращения максимального крутящего момента, номинальной, начала срабатывания регулятора скорости и промежуточных, получают зависимость спектров от частоты вращения, прокручивают двигатель.
Аналогично получают зависимость спектров мгновенных значений ускорений от частоты вращения, сравнивают полученные зависимости амплитудных спектров с эталонными, измеренными предварительно и соотнесенными с давлениями в цилиндрах исправного нормального двигателя, а также с предварительно полученными зависимостями изменения этих величин при изменении состояния двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние двигателя, причем по изменению формы зависимости спектров от частоты вращения судят об изменении угла опережения подачи топлива, по изменению амплитуд гармоник этих спектров судят о различных неисправностях: по амплитуде гармоники, кратной первой гармонике частоты вращения, - о дисбалансе, по амплитуде гармоники, кратной второй гармонике частоты вращения, - о неуравновешенных силах второго порядка, по амплитудам гармоник, кратных третьей и четвертой гармоникам частоты вращения, под нагрузкой, - о средней по цилиндрам индикаторной диаграмме, при прокрутке - о степени герметичности цилиндров; по разности амплитуд гармоник, кратных частотам fk = fцϕц/ϕчв (где k - номера гармонических составляющих, fц - частота цикла работы двигателя, ϕц- угол поворота коленчатого вала за цикл работы двигателя, ϕчв- угол чередования вспышек между соседними группами из двух и более цилиндров, причем число таких групп в цикле четное), измеренных при полной нагрузке и прокрутке, - о неравномерности работы цилиндров, по амплитудам гармоник, кратных пятой-восьмой гармоникам частоты вращения, - о механических потерях в цилиндропоршневых группах, по амплитудам гармоник спектров, кратных частотам переколебаний регулятора, измеренных на регуляторной ветви, - о состоянии регулятора и системы автоматического регулирования скорости в целом.
В стационарном режиме полной нагрузки двигателя, формированного газотурбонаддувом, при заданной заранее частоте вращения коленчатого вала непрерывно измеряют угловые скорость, ускорение и амплитудные спектры мгновенных значений углового ускорения ротора турбокомпрессора, усредняют спектры по множеству циклов работы двигателя, измеряют под нагрузкой эти спектры при частотах вращения максимального крутящего момента, номинальной и промежуточных, получают зависимость спектров от частоты вращения коленчатого вала, сравнивают полученную зависимость с эталонной, измеренной предварительно и соотнесенной с давлениями в цилиндрах исправного нормального двигателя, а также с предварительно полученными зависимостями изменения этих величин при изменении состояния двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние двигателя.
Причем по изменению формы зависимости спектром от частоты вращения судят об изменении угла опережения подачи топлива, по изменению амплитуд гармоник этих спектров судят о различных неисправностях: по амплитудам гармоник, кратных третьей и четвертой гармоникам частоты вращения коленчатого вала, - об индикаторной диаграмме, по амплитудам гармоник, кратных частотам fk = fц•ϕц/ϕчв,, - о неравномерности работы цилиндров.
Аналогично получают зависимости средних значений амплитудных спектров динамической мощности от частоты вращения по множеству разгонов и выбегов без нагрузки на рабочем такте каждого цилиндра по отдельности, сравнивают полученные зависимости с эталонными и с предварительно полученными зависимостями изменения этих величин при изменении состояния цилиндров двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние отдельных цилиндров, аналогично получают зависимости средних значений амплитудных спектров мгновенных значений углового ускорения коленчатого вала от частоты вращения в стационарном режиме полной нагрузки и при прокрутке по множеству циклов работы двигателя на рабочем такте каждого цилиндра по отдельности, сравнивают полученные зависимости с эталонными, измеренными предварительно, и с предварительно полученными зависимостями изменения этих величин по изменении состояния цилиндров двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние отдельных цилиндров.
Причем по изменению амплитуд гармоник этих спектров судят о различных неисправностях: по амплитудам гармоник, кратных третьей и четвертой гармоникам частоты вращения, под нагрузкой - об индикаторной диаграмме, а при прокрутке - о степени герметичности каждого цилиндра по отдельности, по амплитудам гармоник, кратных пятой-восьмой гармоникам частоты вращения, - о механических потерях в цилиндропоршневой группе каждого цилиндра по отдельности.
Аналогично получают зависимость среднего значения амплитудных спектров мгновенных значений углового ускорения ротора турбокомпрессора от частоты вращения в стационарном режиме полной нагрузки по множеству циклов работы двигателя, форсированного газотурбонаддувом, на рабочем такте каждого цилиндра по-отдельности, сравнивают полученные зависимости с эталонными, измеренными предварительно, и с предварительно полученными зависимостями изменения этих величин при изменении состояния цилиндров двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние отдельных цилиндров.
Поставленная цель в экспертной системе достигается тем, что в известную систему дополнительно введены измеритель динамической мощности, блок инерционных констант, анализатор спектра, алгебраический сумматор-усреднитель, регистратор скоростных характеристик, датчик угловых меток ротора турбокомпрессора, формирователь импульсов ротора, селектор частоты вращения, причем выходы датчика угловых меток с отметчиком оборота подключены соответственно к первому и второму входам блока управления, четвертый вход которого соединен с блоком ручного управления, пятый вход подключен через приемник к электронно-вычислительной машине, первый выход блока управления подключен к первому входу цифрового индикатора и первому входу блока вывода, выход которого связан с электронно-вычислительной машиной.
Второй выход блока управления соединен с управляющими входами аналого-цифровых преобразователей, причем выходы датчиков давлений в цилиндрах через усилители связаны с соответствующими информационными входами аналого-цифровых преобразователей, третий выход блока управления соединен с первым входом вычислительного блока, четвертый выход подключен к корректирующим входам усилителей через схему формирования импульсов коррекции и к первому входу формирователя команд обработки, второй вход которого соединен через задатчик алгоритмов обработки с выходом приемника, а третий вход - с первым выходом вычислительного блока, при этом второй выход блока управления соединен с первым входом распределителя тактов, второй вход которого подсоединен к выходу генератора тактовых импульсов, а выход распределителя тактов соединен с четвертым входом формирователя команд обработки и управляющим входом коммутатора, остальные входы которого подключены к выходам аналого-цифровых преобразователей, причем выход коммутатора соединен с вторыми входами блока вывода и вычислительного блока, третий вход которого подключен к выходу формирователя команд обработки, а четвертый вход - к первому выходу блока управления. При этом второй выход вычислительного блока соединен с вторым входом блока цифрового индикатора и третьим входом блока вывода.
Вход первого порогового триггера соединен с выходом одного из усилителей, а выход - с первым входом элемента ИЛИ цикла, выход которого соединен с третьим входом блока управления. Датчик впрыска через последовательно соединенные усилитель впрыска и второй пороговый триггер подключен к второму входу элемента ИЛИ цикла, а датчик угловых меток-зубьев через формирователь импульсов зубьев соединен с шестым входом блока управления, пятый выход которого соединен с входом двойного цифрового дифференциатора, выход которого связан с первыми входами цифрового дискриминатора знака, измерителя динамической мощности и анализатора спектра, выход цифрового дискриминатора знака подключен к седьмому входу блока управления, вторые входы измерителя динамической мощности цифрового дискриминатора знака, анализатора спектра, алгебраического сумматора-усреднителя, регистратора скоростных характеристик, первые входы блоков идентификации и классификации состояний, а также вход блока инерционных констант соединены с первым выходом блока управления, а вторые входы блоков идентификации и классификации состояний, первые входы задатчика моделей процессов и задатчика функций изменения параметров, а также третьи входы анализатора спектра, алгебраического сумматора-усреднителя, регистратора скоростных характеристик соединены с выходом формирователя команд обработки.
Третьи входы блока идентификации и цифрового индикатора, пятый вход блока вывода, а также вторые входы задатчика моделей процессов и задатчика функций изменения параметров соединены с выходом регистратора скоростных характеристик, четвертый вход - с выходом задатчика моделей процессов, а выход - с третьим входом блока классификации состояний, четвертый вход которого соединен с выходом задатчика функций изменения параметров, а выход - с четвертым входом блока вывода, причем шестой выход блока управления соединен с вторым управляющим входом коммутатора, третий вход измерителя динамической мощности связан с выходом блока инерционных констант, четвертый вход - с выходом формирователя команд обработки, а выход - с четвертым входом анализатора спектра, выход которого, в свою очередь, соединен с первым входом алгебраического сумматора-усреднителя, выход которого соединен с первым входом регистратора скоростных характеристик, четвертый вход которого связан с третьим выходом вычислительного блока, причем восьмой вход блока управления соединен через формирователь импульсов с датчиком частоты вращения ротора турбокомпрессора, а пятый вход анализатора спектра - с третьим выходом вычислительного блока.
В экспертной системе в блок управления дополнительно введены третий и четвертый элементы ИЛИ, третий элемент И, причем первый вход блока управления является входом формирователя сигналов угловых меток, выход которого соединен с первым входом первого элемента ИЛИ, второй вход которого является шестым входом блока управления, а выход соединен с входом делителя периода, второй вход блока управления является входом формирователя сигналов оборота, выход которого соединен с первым входом второго элемента ИЛИ, второй вход которого является седьмым входом блока управления, а выход соединен с первым входом формирователя сигналов начала цикла, второй вход которого является третьим входом блока управления, а выход формирователя сигналов начала цикла подключен через счетчик текущего угла к входу избирательного блока и первому входу формирователя команд управления, причем выход счетчика текущего угла является третьим выходом блока управления.
Выход делителя периода соединен с третьим входом формирователя сигналов начала цикла, вторым входом счетчика текущего угла и вторым входом формирователя команд управления, третий и четвертый входы которого являются соответственно четвертым и пятым входами блока управления, а первый выход формирователя команд управления подключен к первому входу первого элемента И, второй вход которого подсоединен к выходу делителя периода.
Выход первого элемента И является вторым выходом блока управления, первым и четвертым выходами которого являются соответственно второй выход формирователя команд управления и выход избирательного блока. Первый вход второго элемента И соединен с выходом первого элемента ИЛИ, выход второго элемента И соединен с первым входом третьего элемента ИЛИ, выход которого является пятым выходом блока управления, а второй вход связан с выходом третьего элемента И, первый вход которого соединен с первым входом четвертого элемента ИЛИ и с четвертым выходом формирователя команд управления, а второй вход является восьмым входом блока управления, причем вторые входы второго элемента И и четвертого элемента ИЛИ связаны с третьим выходом формирователя команд управления, выход четвертого элемента ИЛИ является шестым выходом блока управления.
Вычислительный блок содержит схему выбора экстремумов, измеритель периода, цифровой дифференциатор, блок вычисления среднего индикаторного давления, блок регистров параметров и селектор частоты вращения, при этом третий вход вычислительного блока является первым управляющим входом блока регистров и первым входом схемы выбора экстремума, цифрового дифференциатора, измерителя периода и блока вычисления среднего индикаторного давления, выходы которых, а также первый и второй входы вычислительного блока подсоединены к информационный входам блока регистров, при этом второй вход вычислительного блока является вторым входом схемы выбора экстремума, цифрового дифференциатора и блока вычисления среднего индикаторного давления, третьим входом которых является выход блока регистров, причем четвертый вход блока вычисления среднего индикаторного давления является первым входом вычислительного блока, а выход цифрового дифференциатора соединен с четвертым входом схемы выбора экстремума, второй выход которого является первым выходом вычислительного блока, второй выход и четвертый вход которого являются соответственно выходом и вторым управляющим входом блока регистров, причем выход измерителя периода связан с первым входом селектора частоты вращения, второй вход которого соединен с вторым входом блока регистров, а выход является третьим выходом вычислительного блока.
На фиг. 1 приведены диаграммы логарифмических амплитудных спектров средних за цикл значений динамической эффективной мощности, соответствующие различным тракторным двигателям при достижении ими в разгоне без нагрузки номинальных частот вращения. На фиг. 2 приведены информативные гармоники амплитудных спектров мгновенных значений углового ускорения коленчатого вала двигателя А-41 в стационарном режиме при одной и той же нагрузке (а) и при прокрутке (б) для различных частот вращения. На фиг. 3 приведены аналогичные спектры при различной мощности двигателя А-41 на номинальной частоте вращения. На фиг. 4 приведены аналогичные спектры для двигателя СМД-62 с неравномерным чередованием впрысков при его работе на номинальной частоте вращения и различной неравномерности работы цилиндров. На фиг. 5, 6 изображены функциональные схемы экспертной системы для осуществления способа, а также ее блок управления и вычислительный блок соответственно.
Заявленный способ осуществляют в следующей последовательности. Вначале проводится экспресс-экспертиза двигателя. При этом оценивается общее техническое состояние ДВС. Для этого может быть применен тестовый режим свободного разгона (т. е. режим движения при полной подаче топлива и отсутствии нагрузки). Из теории двигателей известно, что в этом случае, в силу нелинейности характеристик, динамика двигателя может быть описана линеаризованным уравнением в окрестности каждого значения углового скорости ω (частота вращения) со средними значениями в цикле двигателя моментов: инерции  индикаторного
индикаторного  эффективного
эффективного  внутренних потерь
внутренних потерь  и линейной зависимости этих моментов от частоты вращения (среднего значения угловой скорости за один оборот вала).
и линейной зависимости этих моментов от частоты вращения (среднего значения угловой скорости за один оборот вала).
Решение такого уравнения, а также зависимости для углового ускорения и динамической мощности (в окрестности ω = ω*) имеют вид (кроме особой точки):
 перемещение органа топливоподачи в сторону ее увеличения; ψ0- соответствует поступлению на вход ступенчатой функции
перемещение органа топливоподачи в сторону ее увеличения; ψ0- соответствует поступлению на вход ступенчатой функции 
Амплитудно-частотная характеристика ДВС (соответственно спектр сигнала Nc(t)) описывается зависимостью:
AN(θ) = k1•(1+θ2•T
где θ = 2πf , рад/с, f - частота, Гц.
Логарифмический спектр Nc(t) в дБ:
LN = 20lga1 - 20lg[1 + ( θ • T1)2]1/2- 20lg[1+(0,5 θ • T1)2]1/2,
где 
Логарифмический спектр LN можно представить приближенно в виде трех прямых: при θ≤θ1- параллельной оси абсцисс; при θ1< θ < θ2- идущей с наклоном - 20 дБ/декаду; при θ ≥ θ2- идущей с наклоном - 40 дБ/декаду; здесь θ1 = 1/T1, θ2= 2/T1 .
Как видно спектр LN полностью характеризуется средними значениями параметров двигателя и отражает его техническое состояние (при отклонении параметров двигателя от номинальных значений). Так, например, при θ ≈ 0 максимальное значение амплитудного спектра соответствует среднему значению мощности двигателя при установившемся режиме ω = ω*./
С ростом T1 спектр сужается, что при  = const характеризует скорость изменения эффективного момента по угловой скорости, а при известной скорости изменения внутренних потерь - о скорости изменения индикаторного момента или его индикаторной диаграммы. Сравнивая динамические спектры AN (или LN) при определенных значениях ω* с аналогичными эталонными, полученными для двигателя, находящегося в нормальном состоянии, можно оценить в целом фактическое техническое состояние двигателя.
= const характеризует скорость изменения эффективного момента по угловой скорости, а при известной скорости изменения внутренних потерь - о скорости изменения индикаторного момента или его индикаторной диаграммы. Сравнивая динамические спектры AN (или LN) при определенных значениях ω* с аналогичными эталонными, полученными для двигателя, находящегося в нормальном состоянии, можно оценить в целом фактическое техническое состояние двигателя.
На практике достаточно снимать спектры при частотах вращения n, на которых снимаются статические скоростные характеристики, (т.е. при n ≈ nном, nMmax, nXmin и через каждые 100 об/мин, где nMmax- частота вращения, соответствующая максимальному крутящему моменту, nXmin- минимальной частоте холостого хода). Подобные спектры могут быть получены для двигателя, находящегося в других классах состояния (допустимом, предельном, предаварийном, аварийном), т.е. спектры-образцы.
При отличии измеренных спектров от спектров-эталонов спектр AN или LN может использоваться также для локализации несправностей. Так, например, снижение максимального значения мощности (при θ ≈ 0) может свидетельствовать, прежде всего, о повышенных внутренних потерях. В этом случае аналогично снимаются динамические спектры AВП или LВП в режиме свободного выбега двигателя от nном до n = 0. Спектры AВП или LВП также могут быть получены для всех классов состояния:

где 
Появление выбросов в спектре AВП и LВП на отдельных частотах (особенно в области низких частот вращения) свидетельствует о наличии нелинейностей, т. е. наличие у ДВС сухого трения или больших люфтов (износов). Расширение спектра также свидетельствует об увеличении общей мощности потерь.
В свободном разгоне двигателя при достижении им частоты срабатывания регулятора np (близкой к номинальной) начинается колебательный процесс угловой скорости (и соответственно углового ускорения) вокруг этой скорости. При этом в соответствии с теорией первая полуволна (перерегулирование) полностью характеризует качество работы регулятора. Следовательно, амплитуда гармоники ускорения первой полуволны (перерегулирование) отражает техническое состояние регулятора, так как определяется его конструктивными параметрами. Например, для центробежных маятниковых регуляторов тракторных дизелей таковыми являются гармоники углового ускорения, кратные 0,2 - 0,3 гармоникам частоты вращения. Измеряя, при достижении двигателем частоты np, амплитуды этих гармоник ускорения и сравнивая их со значениями, присущими исправному регулятору, можно классифицировать состояние регулятора.
Для повышения точности, ввиду нестационарности процессов топливоподачи и горения топлива, необходимо делать многократные разгоны и находить среднее значение амплитуд гармоник. Если при экспресс-диагностике выявлены отклонения спектра от допустимых значений, то переходят к углубленной экспертизе (локализации неисправностей). Для этого нагружают двигатель. В стационарном (установившемся) режиме под нагрузкой рабочие процессы в двигателе, описываемые уравнением динамики двигателя в моментах, характеризуются определенными гармониками спектра углового ускорения. Гармоники углового ускорения коленчатого вала, кратные первой и второй гармоникам частоты вращения, отражают инерционные показатели двигателя: первая гармоника - дисбаланс: вторая - неуравновешенные силы второго порядка, зависящие от компоновки двигателя, а также остаточные технологические неуравновешенные силы. Составляющие углового ускорения, кратные третьей и четвертой гармоникам частоты вращения, отражают наиболее активную часть термодинамических процессов, происходящих в двигателе. Поэтому амплитуды этих гармоник косвенно характеризуют индикаторную диаграмму и мощность двигателя.
Из теории двигателей известно, что форма скоростей характеристики для крутящего момента изменяется в зависимости от значения угла опережения впрыскивания топлива. Например, появление максимума этой характеристики в области номинальной частоты вращения тракторных дизелей свидетельствует о раннем угле, а появление максимума в области минимальной частоты холостого хода - о позднем угле. Так как третья и четвертая гармоники углового ускорения отражают активную часть термодинамических процессов и крутящего момента, то, построив скоростную характеристику для этих гармоник, можно определить фактическое значение угла опережения впрыскивания топлива по изменению формы скоростной характеристики указанных гармоник. Регуляторная ветвь этой характеристики отражает показатели качества регулятора и системы автоматического регулирования скорости: частоту начала срабатывания регулятора, перерегулирование и т.д.
В стационарном режиме нагрузки спектры ускоренной коленчатого вала могут быть использованы для определения неравномерности работы цилиндра. Если все цилиндры работают одинаково, то все импульсы газовой составляющей углового ускорения в пределах цикла (для четырехтактных ДВС - это 720o поворота коленчатого вала - ПКВ) имеют одинаковую площадь. При этом отсутствуют составляющие ускорения, совпадающие с частотой цикла fц (для четырехтактных двигателей это 0,5 гармоника частоты вращения) и с частотами fк= fц•ϕц/ϕчв, Гц; (где к - номер гармонических составляющих; fц - частота цикла работы двигателя, Гц; ϕц - угол ПКВ за цикл работы двигателя; ϕчв - угол чередования вспышек между соседними группам из двух и более цилиндров, при этом число таких групп в цикле четное). Для четырехтактных двигателей fк=f0•ϕц/2ϕчв, где F0 - частота вращения коленчатого вала.
Если имеется повышенная неравномерность работы цилиндров, то указанные импульсы имеют различную площадь. В зависимости от того, насколько отличаются рабочие процессы в цилиндрах между собой и от их числа, возрастает амплитуда соответствующей гармоники ускорения. Например, для двигателя компоновки 4-р - это гармоники ускорения, кратные 0,5 и 1-й гармоники частоты вращения; для двигателя 6-р - это гармоники ускорения, кратные 0,5 и 1,5-й гармоникам частоты вращения и т.д. Для повышения точности первоначально в режиме прокрутки двигателя на холостом ходу при требуемой частоте вращения, т.е. при которой оценивается неравномерность, определяются амплитуды инерционных гармоник, которые потом вычитаются из измеренных значений гармоник ускорения в режиме нагрузки.
Теоретические и экспериментальные исследования показали, что ресурсные структурные параметры цилиндро-поршневой группы (ЦПГ) - износы, люфты и др. - наиболее активно проявляются при максимальной нагрузке в области номинальных частот вращения в зоне перекладки поршня: (-5...10 - +5...10) градусов относительно ВМТ каждого цилиндра. Ухудшение технического состояния ЦПГ относительно нормального приводит к увеличению ударного импульса в этой зоне и соответственно к росту в окрестности этой зоны неравномерности вращения (росту мгновенных значений угловых скоростей и ускорения). Так как изменение углового ускорения в этой зоне соответствует 4-8 гармоникам частоты вращения, то, измерив амплитуды гармоник углового ускорения, кратных 5 - 8 гармоникам частоты вращения, и сравнив их со значениями, присущими исправному двигателю (эталонному классу) или другим классам, можно классифицировать состояние ЦПГ.
В качестве интегрального (общего) показателя состояния ДВС и регулятора скорости может быть применен суммарный спектр углового ускорения по всем указанным гармоникам Sε (их амплитудам):
k = 0,2; 0,5; 1; 1,5; 2; 3; 4; 5; 6; 7; 8. (8)
Для удобства анализа этот спектр целесообразно пронормировать: (9)
(9)
где S(ε4)ном- = амплитуда гармоники углового ускорения, которая кратна четвертой гармонике частоты вращения и измерения при nном. При этом предварительно необходимо измерить амплитуду S(ε4)ном и, сравнив ее с амплитудой, присущей эталонному двигателю или другому классу состояния, отнести испытуемый двигатель по этой гармонике к ближайшему классу состояния. При прокрутке двигателя без нагрузки преимущественно гармоника углового ускорения, кратная четвертой гармонике частоты вращения, характеризует компрессорную составляющую силовой функции и отклонение ее амплитуды от эталонного значения свидетельствует о повышенных насосных потерях. Предварительно могут быть получены значения амплитуд указанной гармоники для других классов состояния двигателя. Для большей достоверности могут быть измерены амплитуды этой гармоники в области нижних и верхних частот вращения.
Для ДВС, форсированных газотурбонаддувом, работа сил горения топлива в отдельных цилиндрах приводит к колебаниям давления и температуры потока выхлопных газов, что является причиной колебаний угловой скорости и ускорения ротора турбокомпрессора. Таким образом угловое ускорение ротора турбокомпрессора полностью отражает термодинамические процессы в цилиндрах двигателя и по составляющим этого ускорения, кратным третьей или четвертой гармоникам частоты вращения коленчатого вала, можно косвенно оценить давления в цилиндрах и индикаторную мощность двигателя. Построив аналогично скоростную характеристику для этих гармоник, можно оценить по изменению ее формы угол опережения подачи топлива. А по амплитудам гармоник, аналогичным гармоникам ускорения коленчатого вала, можно определить неравномерность работы цилиндров. Преимуществом использования спектров углового ускорения ротора турбокомпрессора является отсутствие в них инерционной составляющей коленчатого вала и составляющей трения в сопряженных ДВС. Это повышает достоверность экспертизы процессов в цилиндрах и облегчает селекцию неисправностей.
Предварительно для нормального исправного двигателя определяют с помощью датчика, установленного в камере сгорания, индикаторную диаграмму давлений цилиндра, а также числовые показатели этой диаграммы (максимальное давление Pz, давление сжатия Pc, среднее индикаторное давление Pi, максимальную скорость нарастания давления (dP/dϕ)max и соответствующие угловые положения этих показателей (ϕz, ϕc, ϕdmax)). Для этого же состояния измеряют амплитудные спектры, получают скоростные характеристики спектров в разгоне, выбеге и в стационарном режиме, которые принимают за эталонные. Предварительно также определяют зависимость изменения индикаторной диаграммы давлений и амплитудных спектров, а также скоростных характеристик при изменении состояния двигателя от нормального до допустимого и предельного. Эти зависимости можно получить, например, проводя ускоренные износные испытания или многофакторный активный эксперимент, учитывающий изменения наиболее значимых факторов. В последнем случае эти зависимости можно описать квадратичным полиномом.
На фиг. 1 показаны диаграммы логарифмических амплитудных спектров средних за цикл значений динамической эффективности мощности различных тракторных двигателей, полученные в разгоне двигателей без нагрузки при полной подаче топлива от минимальной частоты вращения и при достижении ими номинальных частот вращения: кривая 1 - СМД-62, кривая 2 - СМД-19, кривая 3 - Д-240, кривая 4 - А-41. С ухудшением состояния двигателя параметры спектра изменяются: расширение спектра относительно эталонного может свидетельствовать о росте мощности потерь, а уменьшение амплитуд - об ухудшении показателей термодинамических процессов в цилиндрах. Измеряют аналогично спектры на разных частотах вращения: максимального крутящего момента, начала срабатывания регулятора скорости и промежуточных, строят скоростную характеристику спектров на корректорном участке по множеству разгонов, определяют спектр при достижении двигателем частоты срабатывания регулятора (на регуляторном участке), а также получают скоростные характеристики выбега двигателя без нагрузки. Затем сравнивают измеренные спектры и скоростные характеристики с эталонными, а также с зависимостью, описывающей изменение этих величин при изменении состояния двигателя от нормального до допустимого и предельного, и по степени их близости классифицируют состояние двигателя. В качестве меры близости может быть, например, принято обычное евклидово расстояние:
где  - вектор i-го измерения испытуемого двигателя;
- вектор i-го измерения испытуемого двигателя; - вектор средних значений признаков модели (эталона или образца);
- вектор средних значений признаков модели (эталона или образца);
r - число признаков, характеризующих состояние двигателя.
Расстояние d определяется как для всей скоростной характеристики спектров, интегральных спектров (8), (9), так и для их числовых показателей и отдельных информативных гармоник. В первом случае число r определяется разрешающей способностью и требуемой точностью измерения и равно числу значений (отсчетов) спектра, обеспечивающих точное измерение во всем диапазоне информативных гармоник, во всем диапазоне частот вращения двигателя. Расстояние d может быть определено для каждого числового показателя скоростных характеристик спектра: ширины спектра площади спектра, амплитуд отдельных гармоник. В силу разброса рабочих процессов в цилиндре от цикла к циклу необходимо определять среднее значение расстояния d, полученное по множеству циклов (не менее 30), или находить расстояние d для усредненных значений ANi.
Состояние двигателя условно можно разбить на классы: нормальное - при отклонении диаграммы давлений и ее числовых показателей примерно на ± 1% от номинальных значений; допустимое - при их отклонении в худшую сторону на 1 - 5%; предельное - при их отклонении в ту же сторону на 5 - 15% и предварительное - при их отклонении в ту же сторону более чем на 15%. По значению расстояний от измеренной скоростной характеристики спектров до эталонной модели и до соответствующих указанным классам моделей принимается решение о состоянии двигателя. Например, по минимальному значению указанного среднего расстояния можно судить о принадлежности двигателя к данному классу состояния.
Если выявлены отклонения в спектрах от нормального состояния, то переходят к поиску неисправностей в стационарном режиме под нагрузкой и при прокрутке двигателя на различных скоростных режимах. При этом каждый раз измеряют амплитудные спектры мгновенных значений углового ускорения коленчатого вала, выделяют информативные гармоники неисправностей. На фиг. 2 показано изменение амплитуд информативных гармоник 4-цилиндрового двигателя 4Ч 13/14 (А-41) при изменении частоты вращения: ••• - n = 1200 об/мин; ххх - n = 1400 об/мин; ΔΔΔ- n = 1740 об/мин.
На фиг. 3 представлены аналогичные спектры при изменении мощности двигателя: ΔΔΔ- номинальная; ххх - половинная; ••• - одна десятая от номинальной, когда неравномерность работы цилиндров нормальная (а) и предельная (б). Здесь же приведен спектр двигателя с неработающим одним цилиндром (обозначено:  ).
).
На фиг. 2, 3 спектры пронормированы, т.е. отнесены к максимальному значению гармоники. На фиг. 4 показано изменение спектров 6-цилиндрового двигателя СМД-62 с неравномерным чередованием впрысков при его работе на номинальном режиме нагрузки и с различной неравномерностью работы цилиндров (а - для ускорения коленчатого вала, б - для ускорения ротора турбокомпрессора); ••• - двигатель в норме; ххх - не работает третий цилиндр; ΔΔΔ- не работает третий и шестой цилиндры. В спектре (б) за частоту f = 0 принята частота fрот. соответствующая частоте вращения ротора турбокомпрессора.
Классификация состояний двигателя в этом режиме также может проводиться с учетом меры близости (10) как двигателя в целом по скоростным характеристикам спектров, в том числе интегральным (8) и (9), так и по отдельным информативным гармоникам (по каждой неисправности).
Экспертная система для определения технического состояния двигателя внутреннего сгорания (фиг. 5) содержит датчики 11 - 1n давления в цилиндрах, усилители 21 - 2n с коррекцией нулевой линии, аналого-цифровые преобразователи 31 -3n, датчики 4 угловых меток с отметчиком сбора, блок 5 управления, первый пороговый триггер 6, блок 7 ручного управления, приемник 8, ЭВМ 9, цифровой индикатор 10, блок вывода 11, генератор 12 тактовых импульсов, распределитель 13 тактов, задатчик 14 алгоритмов обработки, формирователь 15 команд обработки, коммутатор 16, вычисленный блок 17, схему 18 формирования импульсов коррекции, элемент ИЛИ цикла 19, датчик 20 впрыска топлива, усилитель 21 впрыска, второй пороговый триггер 22, датчик угловых меток-зубьев, формирователь 24 импульсов зубьев, двойной цифровой дифференциатор 25, цифровой дискриминатор 26 знака, измеритель 27 динамической мощности, блок 28 инерционных констант, анализатор спектра 29, алгебраический сумматор-усреднитель 30, блок 31 идентификации, блок 32 классификации состояний, задатчик 33 моделей процесса, задатчик 34 функций изменений параметров, регистратор скоростных характеристик 35, датчик угловых меток ротора турбокомпрессора 36, формирователь 37 импульсов ротора.
Каждый из датчиков 11 - 1n давления в цилиндрах через усилитель 21 - 2n с коррекцией нулевой линии подключен к своему аналого-цифровому преобразователю 31 - 3n, а первый и второй выходы датчика 4 угловых меток с отметчиком оборота - к первому и второму входам блока 5 управления соответственно. Выход одного из усилителей 21 - 2n соединен с входом первого порогового триггера 6, четвертый вход блока 5 управления соединен с блоком ручного управления 7, а пятый вход подключен через приемник 8 к электронно-вычислительной машине 9. Первый выход блока 5 управления соединен с первыми входами цифрового индикатора 10 и блоком 11 вывода, а также с четвертым входом вычислительного блока 17, выход блока вывода 11 соединен с ЭВМ 9; второй выход блока 5 управления соединен с управляющими входами АЦП 31-3n. Генератор 12 тактовых импульсов соединен со вторым входом распределения 13 тактов, первый вход которого соединен с вторым выходом блока 5 управления. Вход задатчика 14 алгоритмов обработки подключен к выходу приемника 8, а выход - к второму входу формирователя 15 команд обработки, первый вход которого соединен с четвертым выходом блока 5 управления, четвертый вход - с выходом распределителя 13 тактов и первым управляющим входом коммутатора 16, третий вход - с первым выходом вычислительного блока 17, а выход - с третьим входом вычислительного блока 17.
Вход схемы 18 формирователя импульсов коррекции соединен с четвертым выходом блока 5 управления, а выход - с корректирующими входами усилителей 21 - 2n. К третьему входу блока 5 управления подключен выход элемента ИЛИ цикла 19, первый вход которого соединен с выходом первого порогового триггера 6. Датчик 20 впрыска топлива через последовательно соединенные усилитель 21 впрыска и второй пороговый триггер 22 подключен к второму входу элемента ИЛИ цикла 19. Датчик 23 угловых меток-зубьев через формирователь 24 импульсов зубьев подключен к шестому входу блока 5 управления. Пятый выход блока 5 управления через двойной цифровой дифференциатор 25 подключен к первым входам цифрового дискриминатора знака 26, измерителя 27 динамической мощности, анализатор спектра 29, вторые входы которых соединены с первым выходом блока 5 управления. Выход цифрового дискриминатора знака 26 подключен к седьмому входу блока 5 управления. Первые входы блоков идентификации 31 и классификации 32 соединены с первым входом блока 5 управления, вторые входы этих блоков, а также первые входы задатчика 33 моделей процесса и задатчика 34 функций изменения параметров подключены к выходу формирователя 15 команд обработки. Четвертый вход блока 31 идентификации связан с выходом задатчика 33 моделей процесса, а выход - с третьим входом блока 32 классификации, четвертый вход которого соединен с выходом задатчика 34 функций изменения параметров, а выход - с четвертым входом блока 11 вывода.
Первый вход алгебраического сумматора-усреднителя 30 связан с выходом анализатора спектра 29, второй вход - с первым выходом блока 5 управления, а выход - с первым входом регистрации 35 скоростных характеристик, второй вход которого соединен с первым выходом блока 5 управления, четвертый вход - с выходом 3 вычислительного блока 17, а выход - с третьими входами цифрового индикатора 10 и блока 31 идентификации, с вторыми входами задатчика 33 моделей и задатчика 34 функций изменения параметров, а также с пятым входом блока вывода 11. Второй вход цифрового индикатора 10 и третий вход блока вывода 11 соединены со вторым выходом вычислительного блока 17, вход блока 28 инерционных констант соединен с первым выходом блока 5 управления, а выход - с третьим входом измерителя 27 динамической мощности, выход которого, в свою очередь, связан с четвертым входом анализатора спектра
29. Четвертый вход измерителя 27 динамической мощности, третьи входы анализатора спектра 29, алгебраического сумматора-усреднителя 30, регистратора скоростных характеристик 35 соединены с выходом формирователя 15 команд обработки. Пятый вход анализатора спектра 29 соединен с третьим выходом вычислительного блока 17, а второй вход блока вывода 11 - с выходом коммутатора 16 и вторым входом вычислительного блока 17. Выход датчика 36 угловых меток ротора турбокомпрессора связан через формирователь 37 импульсов ротора с восьмым входом блока 5 управления, выход 3 которого соединен с первым входом вычислительного блока 17, а выход 6 - с вторым управляющим входом коммутатора 16.
Блок 5 управления (фиг. 6а) содержит формирователь 38 сигналов угловых меток, формирователь 39 сигналов оборота, формирователь 40 сигналов начала цикла, формирователь 41 команд управления, счетчик 42 текущего угла, избирательный блок 43, делитель периода 44, первый, второй и третий элементы И 45, 46, 47, с первого по четвертый элементы ИЛИ 48, 49, 50, 51. Первый вход блока 5 управления является входом формирователя 38 сигналов угловых меток, второй вход блока 5 управления является входом формирователя 39 сигналов оборота, второй вход формирователя 40 сигналов начала цикла является третьим входом блока 5 управления. Выход формирователя 40 начала цикла подключен через счетчик 42 текущего угла к входу избирательного блока 43 и к первому входу формирователя 41 команд управления, причем выход счетчика 42 текущего угла является третьим выходом блока управления. Выход делителя периода 44 соединен с третьим входом формирователя 40 сигналов начала цикла, вторым входом счетчика 42 текущего угла и вторым входом формирователя 41 команд управления, третий и четвертый входы которого являются соответственно четвертым и пятым входами блока 5 управления.
Первый выход формирователя 41 команд управления подключен к первому входу первого элемента И 45, второй вход которого подсоединен к выходу делителя периода 44. Выход первого элемента И 45 является вторым выходом блока 5 управления, первым и четвертым выходами которого являются соответственно второй выход формирователя 41 команд управления и выход избирательного блока 43. Второй вход второго элемента И 46 соединен с третьим выходом формирователя 41 команд управления. Выход формирователя 38 сигналов угловых меток соединен с первым входом первого элемента ИЛИ 48, выход которого подключен к входу делителя периода 44 и первому входу второго элемента И 46. Выход формирователя 39 сигналов оборота связан с первым входом второго элемента ИЛИ 49, выход которого подключен к первому входу формирователя 40 сигналов начала цикла. Вторые входы элементов ИЛИ 48, 49 являются соответственно шестым и седьмым входами блока 5 управления.
Четвертым выходом формирователя 41 команд управления соединен с первым входом третьего элемента И 47, второй вход которого является восьмым входом блока 5 управления, а выход соединен с вторым входом третьего элемента ИЛИ 50, первый вход которого связан с выходом второго элемента И 46, а выход является пятым выходом блока 5 управления. Первый и второй входы четвертого элемента ИЛИ 51 соединены соответственно с четвертым и третьим выходами формирователя 41 команд управления.
Вычислительный блок 17 (фиг. 6б) содержит схему выбора экстремума 52, измеритель периода 53, цифровой дифференциатор 54, блок 55 вычисления среднего индикаторного давления, блок 56 регистров параметров и селектор 57 частоты вращения, при этом третий вход вычислительного блока 17 является первым управляющим входом блока 56 регистров и первыми входами схемы 52 выбора экстремума, цифрового дифференциатора 54, измерителя периода 53 и блока 55 вычисления среднего индикаторного давления, выходы которых, а также первый и второй входы вычислительного блока 17, подсоединены к информационным входам блока регистров 56, при этом второй вход вычислительного блока 17 является вторым входом схемы выбора экстремума 52, цифрового дифференциатора 54 и блока вычисления среднего индикаторного давления 55, третьим входом которых является выход блока регистров 56, причем четвертый вход блока вычисления среднего индикаторного давления 55 является первым входом вычислительного блока 17, а выход цифрового дифференциатора 54 соединен с четвертым входом схемы 52 выбора экстремума, второй выход которой является первым выходом вычислительного блока 17, второй выход и четвертый вход которого являются соответственно выходом и вторым управляющим входом блока 56 регистра, причем первый вход селектора 57 частоты вращения связан с выходом измерителя периода 53, второй вход - с вторым входом блока 56 регистров, а выход является третьим выходом вычислительного блока 17.
В качестве датчика впрыска топлива 20 может быть применен тензо- или вибропреобразователь, установленный с помощью клипсы на трубопровод высокого давления (обычно первого цилиндра).
Второй пороговый триггер 22 выполнен аналогично первому 6 (по схеме триггера Шмитта). В качестве датчика 23 угловых меток-зубьев может использоваться индукционный датчик, устанавливаемый напротив зубчатого венца маховика двигателя. Двойной цифровой дифференциатор 25 может быть выполнен в виде двух последовательно соединенных цифровых дифференциаторов с усреднением, собранных по типовой схеме. Время скользящего усреднения такого дифференциатора будет определяться желаемым числом используемых угловых меток.
Цифровой дискриминатор знака 26 может быть выполнен по типовой схеме сравнивающего устройства кодов текущих чисел с нулем. Измеритель 27 динамической мощности, алгебраический сумматор-усреднитель 30, блоки идентификации 31 и классификации 32 могут быть построены на процессорах с жестко коммутируемой логикой. Блок 28 инерционных констант, задатчик 33 моделей процессов и задатчик 34 функций изменения параметров содержат наборы регистров, в которых хранятся соответствующие числовые значения моментов инерции двигателя, моделей и функций соответственно. Анализатор спектра 29 (параллельный) может содержать набор цифровых фильтров, настроенных на определенные гармоники. Регистратор 35 скоростных характеристик спектров может быть построен на базе жидкокристаллической матрицы регистров, на каждый столбец которой подаются коды сигнала с выхода алгебраического сумматора-усреднителя. Номер столбца определяется частотой вращения коленчатого вала. В качестве датчика 36 угловых меток ротора может использоваться оптический датчик, устанавливаемый напротив крыльчатки турбины, или индукционный датчик при установке на валу турбокомпрессора ферромагнитного зубчатого диска.
Экспертная система работает следующим образом. В системе предусмотрены пять режимов работы: измерения и регистрации индикаторной диаграммы давлений в цилиндрах, обучения, измерения и регистрации скоростных характеристик в переходных режимах, в стационарных режимах, привязки.
При работе двигателя в режиме измерения и регистрации индикаторной диаграммы давлений в цилиндрах мгновенные значения давления газов в цилиндрах преобразуются датчиками 11 - 1n давлений в соответствующее электрическое напряжение, усиливаются усилителями 21- 2n и поступают на сигнальные входы АЦП 31-3n. Одновременно с датчика 4 угловых меток на первый вход блока 5 управления поступают сигналы угловых меток, соответствующие равным изменениям угла ПКВ в определенном количестве за оборот, а сигнал оборотов с датчика 4 поступает на второй вход блока 5 управления. Кроме того, на третий вход блока управления 5 через схему ИЛИ цикла 19 поступает сигнал разделения тактов работы цилиндров, идентифицирующий номер цилиндра. Этот сигнал формируется из сигнала давления, поступающего с выхода выбранного усилителя 2 на пороговый триггер 6, порог срабатывания которого устанавливается таким образом, чтобы исключить воздействие помех. Сигналы угловых меток нормируются по длительности и амплитуде в формирователе 38 и поступают через первую схему ИЛИ 48 на вход делителя периода 44, выходной сигнал которого соответствует равным изменениям угла ПКВ в количестве, возросшем в соответствии с коэффициентом деления.
Сигнал оборота нормируется по длительности и амплитуде в формирователе 39 и поступает через вторую схему ИЛИ 49 на первый вход формирователя 40 сигналов начала цикла, на второй вход которого поступает сигнал разделения тактов работы цилиндров, а на третий вход - сигналы угловых меток с выхода делителя периода 44. Выходной сигнал формирователя 40 сигналов начала цикла служит импульсом начала цикла работы двигателя. Этот сигнал подается на вход начальной установки счетчика 42 текущего угла, на счетный вход которого поступают сигналы угловых меток с делителя периода 44. Код текущего угла ПКВ с выхода счетчика 42 поступает на первый вход формирователя 41 команд управления и на вход избирательного блока 43. В этом блоке путем дешифрации кода текущего угла ПКВ формируются сигналы, соответствующие отдельным тактам работы цилиндров и моментам ВМТ, которые поступают на четвертый выход блока 5 управления и обеспечивают избирательную работу экспертной системы по цилиндрам. Формирователь 41 команд управления по входам 4 и 5 блока управления 5 получает команды с блока 7 ручного управления и с ЭВМ 9 через приемник 8 на вход 2 его поступают также сигналы угловых меток с делителя 44.
На основе входных сигналов формируются сигналы команд управления в цифровом коде, поступающие по общему каналу с выхода 1 блока управления 5 на цифровой индикатор 10, блок вывода 11, вычислительный блок 17, цифровой дискриминатор 26 знака, измеритель 27 динамической мощности, блок инерционных констант 28, анализатор спектра 29, алгебраический сумматор-усреднитель 30, блоки идентификации 31 и классификации 32, регистратор 35 скоростных характеристик. Каждый блок имеет свой адрес, благодаря чему он выполняет предназначенные ему команды. Кроме того, формирователь 41 команд управления вырабатывает сигнал включения процесса измерения, который разрешает прохождение сигналов угловых меток с делителя периода 44 через первый элемент И 45 на выход 2 блока управления 5. Все эти сигналы позволяют организовать процесс вычисления управлять процессом цифровой индикации, а также регистрации индикаторных диаграмм и массива расчитанных параметров, т.е. позволяют осуществить первичную обработку индикаторных диаграмм в реальном масштабе времени, визуализацию данных и обработку индикаторных диаграмм также с помощью ЭВМ.
Схема формирования импульсов коррекции 18 вырабатывает корректирующие импульсы из сигналов мертвых точек в определенный момент времени цикла для каждого цилиндра (например, в момент нижней мертвой точки такта сжатия данного цилиндра). Эти импульсы поступают на корректирующие входы усилителей 21-2n и позволяют производить периодическую автоматическую подстройку нулевой линии сигналов давления, что способствует повышению точности измерения и вычисления параметров, выраженных в абсолютных значениях давлений (максимальное давление Pz, давление в конце такта сжатия Pc и др.).
Сигнал, поступивший с выхода 2 блока управления 5, производит запуск АЦП 31 - 3n, которые преобразуют аналоговые сигналы давлений во всех цилиндрах в соответствующие цифровые коды, поступающие на сигнальные входы коммутатора 16. Кроме того, этот сигнал запускает распределитель 13 тактов, который формирует свою серию тактовых импульсов для каждого цилиндра за период поступающих угловых меток с учетом очередности работы цилиндров ДВС. Частота указанных тактовых импульсов определяется генератором 12 тактовых импульсов, а их число - алгоритмом обработки.
На вход 1 формирователя 15 команд обработки подаются сигналы мертвых точек и тактов работы цилиндров, поступающие с выхода 4 блока управления 5, на вход 2 - сигналы алгоритмов обработки, поступающие с задатчика 14 алгоритмов обработки, на вход 3 - сигналы моментов экстремальных значений информационных сигналов (например, момент максимального давления сгорания), поступающие с выхода 1 вычислительного блока 17, на вход 4 - тактовые импульсы, поступающие с распределителя 13.
Задатчик 14 представляет собой запоминающее устройство с числом ячеек, равным максимальному числу тактов обработки. Каждая ячейка содержит команду, причем последовательность их записи определяет алгоритм работы системы. Команды в задатчике 14 алгоритмов обработки задаются цифровым кодом как с помощью жестко закоммутированной логически, так и по программе ЭВМ 9 через приемник 8.
С учетом поступивших сигналов формирователь 15 команд обработки вырабатывает команды для вычисления всех параметров индикаторных диаграмм по всем цилиндрам в реальном масштабе времени в вычислительном блоке 17. Для каждого цилиндра рассчитывается, например, среднее индикаторное давление  максимальное давление Pz, максимальная скорость нарастания давления (dP/dϕ)max , давление в конце такта сжатия Pc, угловые и временные интервалы между ВМТ и положением Pz, Pc и т.д. Кроме того, вычисляются другие общие параметры, в частности период оборота и частота вращения. Расчет параметров для каждого цилиндра осуществляется на тактах "сжатие-расширение".
максимальное давление Pz, максимальная скорость нарастания давления (dP/dϕ)max , давление в конце такта сжатия Pc, угловые и временные интервалы между ВМТ и положением Pz, Pc и т.д. Кроме того, вычисляются другие общие параметры, в частности период оборота и частота вращения. Расчет параметров для каждого цилиндра осуществляется на тактах "сжатие-расширение".
Процесс вычисления происходит следующим образом. После поступления команды на включение в режиме измерения индикаторной диаграммы на формирователь 15 команд обработки начинают поступать серии тактовых импульсов цилиндров. Вычисление всех параметров по всем цилиндрам производится в каждом угловом отсчете при заданной блоком 5 управления дискретизации по углу ПКВ. Формирование команд обработки для каждого цилиндра начинается с момента появления нижней мертвой точки, причем вычисление внутри одного углового интервала производится последовательно по всем цилиндрам, оно определяется сигналами с распределителя тактов 13. На вычислительный блок 17 постоянно подается код текущего угла ПКВ, используемый при расчете угловых параметров и среднего индикаторного давления. При расчете параметров конкретного цилиндра через коммутатор 16 на вычислительный блок 17 проходит информация о текущем давлении этого цилиндра. Коды мгновенных значений давлений поступают на входы цифрового дифференциатора 54, схемы выбора экстремума 52, блока вычисления среднего индикаторного давления 55. Код текущего угла поступает в блок вычисления среднего индикаторного давления 55 и в блок регистров параметров 56 и служит для расчета угловых параметров и среднего индикаторного давления.
По командам обработки, поступающим на управляющие входы 1 блока 17 в цифровом коде по единому каналу, производится обработка поступающей информации. В блоке 55 рассчитывается среднее индикаторное давление методом численного интегрирования, а в цифровом дифференциаторе 54 - производная давления по углу ПРВ. Схема 52 выбора экстремума производит выделение моментов экстремальных значений информационных сигналов - давления и производных давления и выдает эти сигналы на выход 1 вычислительного блока 17 для формирования команд обработки.
В измерителе 53 периода измеряются различные временные интервалы по поступающим командам обработки. Для реализации алгоритма вычисления параметров на третьи входы схемы 52 выбора экстремума, цифрового дифференциатора 54 и блока 55 вычисления среднего индикаторного давления подается информация о соответствующих результатах вычислений по данному цилиндру за предыдущий угловой отсчет с выхода блока 56 регистров. В каждом угловом отсчете с учетом текущей информации о давлении, поступающей на вторые входы указанных блоков с конкретного датчика по сигналу распределителей 13 тактов через коммутатор 16, производится обработка по заданным алгоритмам для каждого параметра каждого цилиндра, и промежуточные результаты постоянно заносятся в блок 56 регистров.
Вычисленные значения параметров за цикл работы каждого цилиндра поступают в блок 56 регистров параметров, где хранятся значения всего набора параметров по каждому цилиндру до поступления новых значений за следующий цикл работы. В течение этого времени по командам управления, поступающим на второй управляющий вход блока 56 регистров параметров, выводится вычисленные параметры. Процесс расчета повторяется в каждом цикле работы цилиндра. При поступлении команды на выключение процесса измерения вычисление производится до конца по всем цилиндрам и в вычислительном блоке 17 хранятся значения параметров по всем цилиндрам за последний цикл. Вычисленные значения параметров могут высвечиваться на цифровом индикаторе 10 по командам с блока управления 5.
Различные массивы вычисленных параметров, а также индикаторные диаграммы с дискретностью по углу ПКВ, определяемой блоком управления 5, могут заноситься в ЭВМ 9 для вторичной обработки по сложным программам, а также для долговременного хранения индикаторных диаграмм-образцов, соответствующих различным классам состояний ДВС.
Перед обучением экспертной системы первоначально необходимо наполнить базу данных и базу знаний информацией, необходимой для обеспечения классификации состояний двигателя. С этой целью в описанном режиме регистрируются индикаторные диаграммы давлений, вычисляются их частные параметры, а также измеряются или вычисляются другие необходимые технические показатели двигателя (мощность, расход топлива и т.д.) и по ним определяют техническое состояние двигателя. В соответствии с требованиями нормативно-технической документации по отклонениям параметров от паспортных (нормальных) классифицируют состояние двигателя. Различные технические состояния двигателя (нормальное, допустимое, предельное и т.д.) могут быть также смоделированы путем разрегулировок, замены узлов, деталей и т.д. После установления принадлежности испытуемого двигателя к конкретному классу состояний в режиме обучения измеряют и регистрируют скоростные характеристики спектров, а также вычисляют частные параметры (амплитуды гармоник, ширину спектра и его площадь).
Для двигателя с нормальным техническим состоянием эти характеристики и указанные параметры записывают в задатчик 33 моделей процессов. Аналогично измеряют и регистрируют скоростные характеристики спектров и их частные параметры для других заранее установленных технических состояний двигателя, относящихся к классам допустимого, предельного, предаварийного и др. состояний двигателя. Значения характерных точек этих характеристик (при nном., nМмах, np и через каждые 100 об/мин), а также частных параметров записываются в датчик 34 функций изменения параметров. Задатчик 33 вместе с регистратором 35 скоростных характеристик и блоком 56 регистров образуют базу данных, а задатчик 34 вместе с блоками идентификации 31 и классификации 32 - базу знаний экспертной системы. При работе экспертной системы в режимах обучения, измерения и регистрации скоростных характеристик спектров в переходных, стационарных режимах на вход экспертной системы поступают сигналы только с датчика 23 угловых меток-зубьев, а в режиме съема информации с турбокомпрессора - только с датчиков 36 угловых меток ротора турбокомпрессора и 23 угловых меток-зубьев. В режиме измерения и регистрации скоростных характеристик спектра отдельных цилиндров добавляется датчик 20 впрыска топлива.
Работа экспертной системы в режиме привязки осуществляется в следующей последовательности. Устанавливают двигателю минимальную частоту вращения холостого хода. Сигнал с датчика 20 через усилитель впрыска 21 подается на вход второго порогового триггера 22, в котором при появлении сигнала с датчика 21, превысившего порог, формируется импульс, причем порог срабатывания триггера 22 выбирается таким, чтобы исключить действие помех с уровнем, меньшим амплитуды усиленного сигнала датчика 20. Сигнал с выхода порогового триггера 21 проходит через схему ИЛИ цикла 19 на третий вход блока 5 управления. Сигнал с датчика 23 угловых меток-зубьев через формирователь 24 импульсов зубьев подается на шестой вход блока 5 управления, который одновременно является вторым входом первого элемента ИЛИ 48. С выхода этого элемента сформированные угловые метки при наличии разрешающего сигнала с формирователя 41 команд управления проходят последовательно через второй элемент И 46 и третий элемент ИЛИ 50 на пятый выход блока 5 управления. Этот разрешающий сигнал формируется в формирователе 41 команд управления только в режиме привязки, обучения и измерения скоростных характеристик спектров отдельных цилиндров и подается на один из входов второго элемента И 46 , а также через четвертую схему ИЛИ - на шестой выход блока 5 управления, откуда он поступает на второй управляющий вход коммутатора 16, для которого является запрещающим, препятствующим прохождению каких-либо сигналов через коммутатор 16. С пятого выхода блока управления сигналы угловых меток подаются на вход двойного цифрового дифференциатора 25, в котором рассчитывается угловое ускорение в течение следования трех или более соседних угловых меток. Коды этого ускорения непрерывно подаются на первый вход цифрового дискриминатора знака 26. В режиме привязки на второй вход этого дискриминатора с выхода 1 блока 5 управления поступает сформированная в формирователе 41 команд управления команда на разрешение работы дискриминатора.
В дискриминаторе 26 знака происходит сравнение текущих кодов ускорений с нулем и в моменты смены знаков с минуса на плюс с его выхода на вход 7 блока 5 управления, который одновременно является вторым входом второго элемента ИЛИ 49, подается импульс длительностью не более интервала между соседними угловыми метками. Прошедшая через формирователь 40 сигналов начала цикла угловая метка, серия которых поступает на третий вход этого формирователя с выхода делителя периода 44, принимается за начало цикла работы двигателя. Она соответствует ВМТ того цилиндра, на котором установлен датчик 20 впрыска топлива (обычно это первый цилиндр). Сигнал начала цикла с выхода формирователя 40 поступает на вход начальной установки счетчика 42 текущего угла, на счетный вход которого поступает серия угловых меток с выхода делителя 44 периода. Выработанный код текущего угла ПКВ поступает на первый вход формирователя 41 команд управления и на вход избирательного блока 43, в котором формируются сигналы, соответствующие тактам мертвых точек. Остальные блоки экспертной системы в работе в этом режиме не участвуют, так как на них не подаются команды включения в работу с блока управления 5.
Привязка по углу ПКВ сохраняется в режиме обучения и в режим измерения и регистрации скоростных характеристик спектров отдельных цилиндров.
Работа экспертной системы в режиме обучения осуществляется следующим образом. После того, как в режиме измерения и регистрации индикаторных диаграмм давлений в цилиндрах выявлен класс технического состояния, к которому относится испытуемый двигатель (например, "нормальное состояние"), измеряются и регистрируются скоростные характеристики спектров в следующей последовательности. С учетом привязки по углу ПКВ, осуществленной в режиме привязки, а также с учетом команд управления, поступившим по входам 4 и 5 блока 5 управления с блока 7 ручного управления и с ЭВМ 9 через приемник 8, формирователь 41 команд управления формирует сигналы команд управления, поступающих по общему каналу с выхода 1 блока 5 управления на цифровой индикатор 10, блок вывода 11, вычислительный блок 17, дискриминатор знака 26, измеритель 27 динамической мощности, блок 28 инерционных констант, анализатор спектра 29, алгебраический сумматор-усреднитель 30, блоки 31 идентификации и 32 классификации состояний, регистратор скоростных характеристик 35. Формирователь 41 команд управления вырабатывает также сигналы включения процесса измерения, один из которых разрешает прохождение сигналов угловых меток с поделенным периодом с делителя 44 через первый элемент И 45 на выход 2, а второй - сформированных угловых меток с выхода первого элемента ИЛИ 48 через второй элемент И 46 и третий элемент ИЛИ 50 на выход 5 блока 5 управления.
Сигнал включения, полученный с выхода 3 формирователя 41 команд управления, поступает также через четвертый элемент ИЛИ 51 на выход 6 блока 5 управления. Все эти сигналы обеспечивают процессы вычисления, хранения, создания баз данных и знаний, управлений цифровой индикацией, регистрации скоростных характеристик спектров и массивов рассчитанных параметров, т.е. позволяют осуществить первичную обработку информации в реальном масштабе времени, их визуализацию, обработку с помощью ЭВМ.
Сигнал включения с выхода 6 блока 5 управления поступает на второй управляющий вход коммутатора 16, который в режимах обучения и измерения скоростных характеристик спектра препятствует прохождению сигналов на выход коммутатора 16. Работа генератора тактовых импульсов 12, распределителя тактов 13, задатчиков алгоритмов обработки 14 и формирователя команд обработки 15 аналогична работе в режиме измерения индикаторных диаграмм давлений.
Сигналы угловых меток с пятого выхода блока 5 управления поступают на вход двойного цифрового дифференциатора 25, в котором осуществляется вычисление текущих значений угловых скорости и ускорения коленчатого вала.
В подрежиме обучения "определение скоростных характеристик спектров динамической мощности двигателя по сигналу с коленчатого вала" предварительно задают частоту-вращения, при которой необходимо измерить спектры. Она вводится с блока 7 ручного управления (на вход 4 блока 5 управления) или с ЭВМ 9 через приемник 8 (на вход 5 блока 5 управления). Код требуемой частоты через формирователь 41 команд управления блока 5 управления поступает на вход 4 вычислительного блока 17 и дальше - на второй вход селектора 57 частоты вращения, на первый вход которого поступают коды текущей частоты вращения с выхода измерителя 53 периода.
Двигателю устанавливается минимальная частота вращения холостого хода без нагрузки, затем орган управления топливоподачи резко перемещается в сторону полной подачи. Коды текущих значений угловых скорости и ускорения коленчатого вала с выхода двойного цифрового дифференциатора 25 непрерывно поступают на первый информационный вход измерителя 27 динамической мощности. По команде управления, поступившей с формирователя 41 команд управления на второй вход измерителя 27 динамической мощности и на вход блока 28 инерционных констант, с выхода блока 28 на третий вход измерителя 27 подается код момента инерции, соответствующий испытуемому двигателю, и дается разрешение на работу.
Измеритель 27 динамической мощности производит в этом подрежиме предварительное усреднение угловых скорости и ускорения в течение всего цикла работы двигателя. Временной интервал цикла задается командами, поступающими с выхода формирователя 15 команд обработки на четвертый вход измерителя 27 динамической мощности. Усредненные значения угловых скорости и ускорения непрерывно умножаются друг на друга, а также на момент инерции. С выхода измерителя 27 сигнал динамической мощности поступает в виде кодов на четвертый информационный вход анализатора спектра 29. На его второй управляющий вход подается команда на включение, поступающая с выхода 2 формирователя 41 команд управления (с первого выхода блока 5 управления).
На третий управляющий вход анализатора спектра 29 подаются команды, соответствующие интервалу времени цикла работы двигателя. В процессе разгона двигателя анализатор непрерывно в течение цикла определяет спектры сигнала. При достижении заданной частоты вращения коды на входах селектора 57 частоты вращения становятся равными, тогда на его выходе появляется сигнал, который с третьего выхода вычислительного блока 17 поступает на пятый вход анализатора спектра 29. В результате дальнейшеи анализ спектра прекращается. Коды гармоник спектра за последний цикл передаются с выхода анализатора спектра 29 на первый информационный вход алгебраического сумматора-усреднителя 30, на второй вход которого с первого выхода блока 5 управления поступает команда на включение, а на третий вход - команды временного интервала цикла. В рассматриваемом подрежиме алгебраический сумматор 30 обеспечивает запоминание составляющих спектра, поступивших на его первый вход в режиме разгона, а затем выбега (или наоборот), расчет среднего значения каждой составляющей спектра по множеству разгонов, а также по множеству выбегов, алгебраическое сложение спектров разгона и выбега (при необходимости) и передачу усредненных спектров с выхода на первый информационный вход регистратора 35 скоростных характеристик спектра. Измерение спектра в выбеге осуществляется аналогично тому, как в разгоне.
Регистратор 35 скоростных характеристик спектра осуществляет хранение, визуализацию рассчитанных скоростных характеристик спектров, а также их передачу на цифровой индикатор 10, задатчики 33 моделей процесса и 34 функции изменения параметра и через блок вывода 11 - в ЭВМ 9. На вход 2 поступают команды на включение регистратора 35 и очередность визуализации спектров, которые сформированы в формирователе 41 команд управления и выдаются с первого выхода блока 5 управления. На вход 3 в этом подрежиме подаются команды, обеспечивающие регистрацию скоростных характеристик спектров всего двигателя (за цикл). Для визуализации на экран регистратора 35 выводятся только информативные гармоники (не более 10). Каждой заданной частоте вращения, код которой поступает на вход 4 регистратора 35 с выхода селектора 57 частоты вращения (с выхода 3 вычислительного блока 17), соответствует набор регистров, куда записываются коды гармоник спектра и высвечивается зона точек на экране. В зависимости от абсолютного значения заданной частоты вращения эта зона точек занимает определенное положение по оси абсцисс. Предварительно шкала абсцисс нормируется: например, номинальная частота вращения соответствует столбцу, занимающему 80% всего числа столбцов экрана.
Затем устанавливают с помощью блока 7 ручного управления или с помощью ЭВМ 9 и приемника 8 через формирователь 41 команд управления в селекторе 57 частоты вращения другую частоту вращения, при которой вновь измеряются аналогично спектры. Процесс повторяется до получения всей скоростной характеристики. Результаты измерений последовательно выводятся на экран регистратора 35 скоростных характеристик. Аналогично измеряют и регистрируют спектры амплитуд динамической мощности при достижении в разгоне двигателя частоты начала срабатывания регулятора скорости. При необходимости на экран по командам, поступающим на вход 2 с формирователя 41 команд управления, могут выводится поочередно скоростные характеристики отдельных гармоник.
Кроме того, скоростные характеристики амплитудных спектров динамической мощности поступают на третий вход цифрового индикатора 10, где они могут быть представлены в числовом виде, на пятый вход блока вывода 11 для их передачи в ЭВМ 9, а также подаются на вторые (информационные) входы задатчика 33 моделей процесса и задатчика 34 функций изменения параметров. По командам, поступающим с выхода формирователя 15 команд обработки на первые (управляющие) входы этих задатчиков, происходит запись и хранение кодов скоростных характеристик спектров динамической мощности эталона и их параметров для нормального исправного двигателя. В задатчик 33 хранится модель-эталон скоростной характеристики амплитудных спектров динамической мощности и ее параметров (ширины спектров, амплитуд отдельных гармоник, площади спектров).
Затем по командам с блока 7 ручного управления, поступающим на вход 4 блока управления 5 или с ЭВМ 9 через приемник 8, поступающим на вход 5 блока 5 управления устанавливается подрежим обучения "определение скоростных характеристик спектров динамической мощности цилиндров двигателя по сигналу с коленчатого вала". Перед включением этого подрежима необходимо обязательно включить режим привязки, который может быть включен перед режимом обучения или перед рассматриваемым подрежимом обучения. В первом случае измеряются и обрабатываются сигналы с датчика угловых меток в течение цикла работы двигателя без учета отдельных цилиндров (720o поворота коленчатого вала четырехтактных ДВС). При этом датчик 20 впрыска может отсутствовать. Однако в этом случае предварительно необходимо установить вручную емкость счетчика 42 текущего угла, равной числу угловых меток за цикл для испытуемого двигателя, и подать разрешающий сигнал на первый вход счетчика 42.
Работа экспертной систем в этом подрежиме обучения аналогична работе в предыдущем подрежиме за исключением того, что измерение динамической мощности в измерителе 27 и спектра в анализаторе 29, суммирование и усреднение в алгебраическом сумматоре-усреднителе 30, а также получение и регистрация скоростных характеристик спектров в регистраторе 35 осуществляется по каждому цилиндру по отдельности. Для обеспечения работы на вторые входы этих блоков подаются команды управления с выхода 1 блока 5 управления, которые вырабатываются в формирователе 41 блока 5 с учетом команд, полученных этим формирователем по входу 4 с блока 7 ручного управления и по входу 5 с ЭВМ 9 через приемник 8. На третьи входы анализатора спектра 29, алгебраического сумматора-усреднителя 30, регистратора 35 скоростных характеристик, а также на четвертый вход измерителя 27 динамической мощности поступают команды с выхода формирователя 15 команд обработки, которые обеспечивают обработку сигнала с учетом распределения рабочих тактов цилиндров в двигателе по информации, поступающей на четвертый вход этого формирователя с выхода распределителя 13 тактов, и алгоритмов обработки, поступающих на второй вход формирователя 15 с ЭВМ 9 через приемник 8 и задатчик 14 алгоритмов обработки.
Скоростные характеристики амплитудных спектров динамической мощности каждого цилиндра в разгоне и выбеге поочередно выводятся на экран регистратора 35 скоростных характеристик, поступают на третий вход цифрового индикатора 10, на пятый вход блока вывода 11 для их передачи в ЭВМ 9, а также подаются на вторые (информационные) входы задатчика 33 моделей процесса и задатчика 34 функций изменения параметров. По командам, поступающим с выхода формирователя 15 команд обработки на первые (управляющие) входы этих задатчиков, происходит запись и хранение кодов скоростных характеристик спектров динамической мощности каждого цилиндра эталона и их параметров для нормального исправного двигателя. В задатчике 33 хранится модель-эталон скоростных характеристик амплитудных спектров динамической мощности каждого цилиндра и их параметров (ширины спектров, амплитуд отдельных гармоник, площадь спектров).
Затем по командам с блока 7 ручного управления, поступающим на вход 4 блока управления 5 или с ЭВМ 9 через приемник 8, поступающим на вход 5 блока управления 5, устанавливается подрежим обучения "определение статических скоростных характеристик спектров ускорений по сигналу с коленчатого вала". Аналогично предыдущим подрежимам задают предварительно частоту вращения, при которой требуется измерить спектры. Нагружают полностью двигатель и аналогично предыдущим подрежимам измеряют непрерывно угловое ускорение коленчатого вала, которое с выхода двойного дифференциатора 25 подается на первый (информационный) вход анализатора спектра 29. Измеритель 27 динамической мощности в этом подрежиме не работает. Если анализатор спектра состоит из набора фильтра (аналоговых с цифровым управлением перестройкой, аналого-цифровых или цифровых), то они могут быть настроены только на информационные гармоники спектра.
Усреднение спектров по множеству циклов при нагрузке и при прокрутке и суммирование усредненных спектров, полученных при этих подрежимах, в алгебраическом сумматоре-усреднителе 30, и также регистрация спектров в регистраторе 35 скоростных характеристик производится аналогично предыдущим подрежимам. После этого задают следующую частоту вращения, при которой требуется измерить спектры. Процесс повторяется до получения статических скоростных характеристик двигателя при нагрузке и при прокрутке в том числе ее регуляторной ветви. Вывод результатов на цифровой индикатор 10, ЭВМ 9 через блок вывода 11, а также передача кодов скоростных характеристик и их параметров на задатчик 33 моделей процессов и задатчик 34 функций изменения параметров происходит аналогично предыдущим подрежимам.
Затем по командам с блока 7 ручного управления или с ЭВМ 9 аналогично предыдущим подрежимам устанавливают подрежим обучения "определение статических скоростных характеристик спектров ускорений цилиндров по сигналу с коленчатого вала". Работа экспертной системы в этом подрежиме аналогична работе в предыдущем подрежиме за исключением того, что измерения спектров в анализаторе 29 и его дальнейшая обработка и регистрация осуществляется с учетом распределения тактов работы цилиндров двигателя (аналогично тому, как в подрежиме получения скоростных характеристик спектров динамической мощности цилиндров).
Для двигателей, форсированных газотурбонаддувом, затем последовательно устанавливают по командам с блока 7 ручного управления или с ЭВМ 9 аналогично подрежим обучения "определение статических скоростных характеристик спектров ускорений двигателя по сигналу с турбокомпрессора" и подрежим обучения "определение статических скоростных характеристик спектров ускорений цилиндров по сигналу с турбокомпрессора". Работа экспертной системы в этих режимах аналогична соответствующим предыдущим двум подрежимам. Исключение составляет то, что на вход двойного цифрового дифференциатора 25 поступают сигналы угловых меток с пятого выхода блока 5 управления, которые получены от датчика 36 угловых меток ротора турбокомпрессора, пропущены через формирователь 37 импульсов ротора, поданы на восьмой вход блока 5 управления, т.е. на второй вход третьего элемента И 47, с выхода которого они поступают на первый вход третьего элемента ИЛИ 50, выход которого является пятым выходом блока 5 управления. Команда на передачу этих угловых меток поступает на первый вход третьего элемента И 47 с четвертого выхода формирователя 41 команд управления, в котором она образуется с учетом команд, поступивших на его третий и четвертый входы, т.е. на четвертый или пятый входы блока 5 управления с блока 7 ручного управления и с ЭВМ 9 через приемник 8 соответственно. Кроме того, на нулевой столбец (регистр) регистратора 35 скоростных характеристик подается код гармоники, кратной средней частоте вращения ротора турбокомпрессора.
Затем на испытательный стенд устанавливают двигатель с другим известным классом состояний (например, допустимым) или моделируют это состояние искусственным внесением неисправностей. В режиме измерения индикаторных диаграмм давлений регистрируется индикаторная диаграмма давлений и ее параметры. Этим самым более точно подтверждается класс состояния двигателя. После этого в последовательности, аналогичной вышеописанной, в режиме обучения вновь измеряются скоростные характеристики спектров и их параметры, которые поступают также по командам формирователя 15 команд управления в задатчик 34 функций изменения параметров. В этом задатчике для каждой информативной гармоники спектра на соответствующей частоте вращения, а также для его параметров (ширины и площади спектра) определяется уравнение перехода из одного класса состояний в другой. Например, если испытывается двигатель только в двух состояниях: нормальном и допустимом, то это уравнение является уравнением прямой. Для получения более точного уравнения перехода необходимо аналогично найти промежуточные 2-3 точки между указанными классами состояний. В этом случае уравнение перехода может быть, например, квадратичным. Полученные уравнения перехода из класса нормального состояния в допустимое хранятся в задатчике 34 функций изменения параметров. Эти уравнения получают отдельно для каждой из информативных гармоник и признаков, позволяющих локализовать неисправности. В результате создаются предпосылки для классификации состояний двигателя углубленно по каждой системе и узлу, для которых имеется информативная гармоника или иной показатель в спектре.
В такой же последовательности определяются уравнения перехода из класса допустимых состояний в класс предельных состояний, для чего испытываются двигатели с соответствующим состоянием. Полученные уравнения связи хранятся в задатчике 34 функций изменения параметров. Для повышения достоверности классификации в задатчике 33 моделей процесса могут храниться образцы каждого класса состояний. Модели-эталоны, модели-образцы и уравнения связи могут быть переданы в ЭВМ 9, а также вызваны оттуда и переданы в задатчики 33 и 34.
В режиме экспертизы состояний, если для данной марки двигателя было проведено обучение экспертной системы, осуществляется измерение скоростных характеристик спектров в последовательности, аналогичной вышеописанной в режиме обучения, за исключением того, что коды измеренных скоростных характеристик спектров и их числовых показателей по командам формирователя 15 команд обработки подаются на третий (информационный) вход блока 31 идентификации. В этом блоке происходит сравнение текущих кодов измеренных скоростных характеристик спектров, их числовых показателей и информативных гармоник с аналогичными по фазе значениями кодов модели-эталона или модели образца, хранящимися в задатчике 33 моделей процесса. Результаты сравнения в виде разности кодов поступают на третий (информационный) вход блока классификации 32, который производит вычисление меры близости, например вида (10), а также с учетом знаний о поведении двигателя при изменении его состояния, т.е. функций перехода из класса в класс, хранящихся в задатчике 34 функций измерения параметров, осуществляет вычисление по заданному решающему правилу и выносит экспертное заключение о принадлежности испытуемого двигателя к определенному классу состояний.
В качестве решающего правила может использоваться, например минимальное значение вычисленного среднего значения (10) между измеренным процессом и моделью-эталоном или моделью-образцом в зависимости от того, хранится ли в задатчике 33 моделей процесса одна модель-эталон или также модели-образца классов. Из-за разброса параметров процессов горения от цикла к циклу вычисление расстояния (10) в блоке классификации 32 осуществляется по множеству циклов. Информация о результатах экспертизы может быть передана в ЭВМ 9 для создания досье на конкретный двигатель, а также проведения других более сложных вычислительных операций, например прогнозирования технического состояния двигателя, а также его составных систем и узлов. При этом вычисленные меры близости (10) и нахождение минимального значения среднего расстояния (10) между измеренными значениями каждой информативной гармоники, а также других показателей спектров и моделью-эталоном или моделью-образцом позволяют классифицировать двигатель по каждой неисправности в отдельности. Так, например, по изменению в подрежиме "экспертиза общего состояния ДВС" в разгоне спектров динамической мощности и частных показателей (ширины и площади спектров) при определенных частотах вращения (номинальной, минимальной холостого хода, максимального крутящего момента и промежуточных) в блоке классификации 32 выносится решение или о нахождении двигателя в целом в нормальном состоянии или о его выходе из этого состояния, пли также о его принадлежности к другим классам состояний (допустимому, предельному и др.).
По изменению тех же величин в выбеге в блоке классификации 32 выносится решение о принадлежности двигателя в целом к тому или иному состоянию по внутренним потерям. По изменению амплитуд гармоник амплитудного спектра динамической мощности, кратных частотам переколебаний регулятора (кратных примерно 0,2 - 0,3 гармоникам частоты вращения у тракторных дизелей), в блоке классификации 32 выносится решение о принадлежности регулятора к тому или иному классу состояний. В подрежиме "экспертиза общего состояния цилиндров ДВС" по изменению в разгоне и выбеге аналогичных спектров отдельных цилиндров в этом же блоке выносится решение о классификации состояния индикаторных диаграмм каждого цилиндра и его внутренних потерь.
Экспертиза состояний проводится последовательно. Если в подрежиме "экспертиза общего состояния ДВС и САРС" обнаружен блоком классификации 32 выход из класса нормального состояния, то включают следующий подрежим "экспертиза общего состояния цилиндров ДВС". Если блоком классификации 32 зафиксирован выход из класса нормального состояния отдельных цилиндров, то включают подрежим "углубленная экспертиза общего состояния ДВС". При включении этого подрежима получают при полной нагрузке статическую (внешнюю) характеристику усредненных амплитудных спектров мгновенных значений угловых ускорений коленчатого вала и по степени близости (10) в блоке классификации 32 принимается решение о принадлежности двигателя в целом к тому или иному классу состояний, причем по изменению формы этой зависимости от частоты вращения в блоке 32 классификации принимается решение об отнесении регулировки угла опережения подачи топлива к тому или иному классу состояний.
По изменению амплитуд гармоник в блоке 32 классифицируется двигатель по следующим неисправностям: по амплитуде гармоники, кратной первой гармонике частоты вращения - дисбаланс, кратной второй гармонике - неуравновешенные силы второго порядка, по амплитудам гармоник, кратных третьей и четвертой гармоникам частоты вращения, под нагрузкой - индикаторная диаграмма двигателя (средняя по цилиндрам), а при прокрутке - степень герметичности цилиндров (в среднем), по разности амплитуд гармоник, кратных частоте fк, измеренных при полной нагрузке и прокрутке, - неравномерность работы цилиндров; по амплитудам гармоник, кратных пятой - восьмой гармоникам частоты вращения, - механические потери в цилиндропоршневых группах (в среднем); по амплитудам гармоник, кратных частотам переколебаний регулятора, которые измерены на регуляторной ветви, - регулятор скорости и система автоматического регулирования скорости в целом.
Если в этом подрежиме блоком 32 классификации выявлен выход из класса нормального состояния по признакам, связанным с состоянием цилиндров в целом, то переходят в подрежим "углубленная экспертиза цилиндров ДВС". В этом подрежиме в блоке 32 классификации осуществляется классификация состояния ДВС и локализация неисправностей аналогично предыдущему подрежиму, но для каждого цилиндра по отдельности.
Для двигателей, форсированных газотурбонаддувом, с целью повышения достоверности экспертизы, дополнительно включатся два подрежима экспертизы: "углубленная экспертиза общего состояния ДВС с турбонаддувом" и "углубленная экспертиза цилиндров ДВС с турбонаддувом". В этих подрежимах аналогично двум предыдущим в блоке 32 классификации определяется принадлежность двигателя в целом, в также его отдельных узлов к определенному классу состояний. Только при этом используются аналогичные гармоники спектров углового ускорения ротора турбокомпрессора. Однако состояние регулятора и механические потери в этих режимах не оцениваются.
Предлагаемый способ и экспертная система для определения технического состояния двигателя могут использоваться как для исследования рабочего процесса двигателя внутреннего сгорания и автоматизация управления его работой, так и для проведения экспертизы технического состояния ДВС в производственных и эксплуатационных условиях предварительном обучении экспертной системы. Способ и экспертная система позволяют оперативно и точно получить объективное экспертное заключение о техническом состоянии двигателя. Экспертная система обеспечивает оперативное измерение, обработку и регистрацию больших массивов данных множества последовательно чередующихся индикаторных диаграмм давлений и скоростных характеристик спектров с визуализацией промежуточных и результирующих данных, с возможностью выхода на ЭВМ и вывода результатов обработки на любое устройство вывода (цифропечатающее устройство, дисплей, графопостроитель и т.д.). Она позволяет путем создания баз данных и баз знаний неограниченного объема использовать накопленный интеллектуальный потенциал разработчиков, исследователей, диагностов, эксплуатационников для проведения объективной экспертизы технического состояния ДВС.
Источники информации
1. Патент N 4539841 US, МКИ3, кл. G 01 M 15/00. Способ определения давления сжатия в цилиндрах двигателя и мощности двигателя. Опубл. 10.09.85 г.
2. Патент N 2078324 RU, МКИ3 , кл. G 01 M 15/00. Способ определения технического состояния двигателей внутреннего сгорания и экспертная система для его осуществления. Заявл. 22.09.94, N 94-037900/06, опубл. 1997, БИ N 12.
3. Авт. свид. N 954839 SU, МКИ3, кл G 01 M 15/00. Система для регистрации и обработки индикаторных диаграмм. Заявл. 26.01.81, N 3241786/25-06, опубл. 30.08.82 БИ N 32.
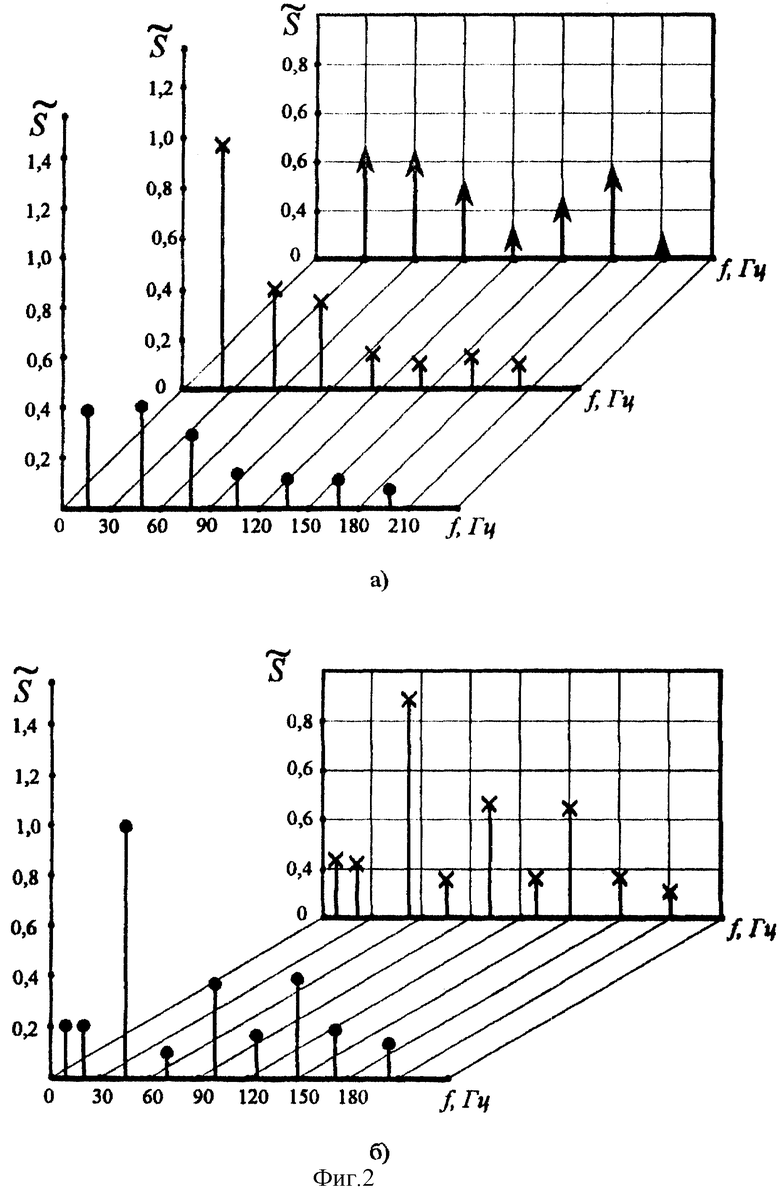
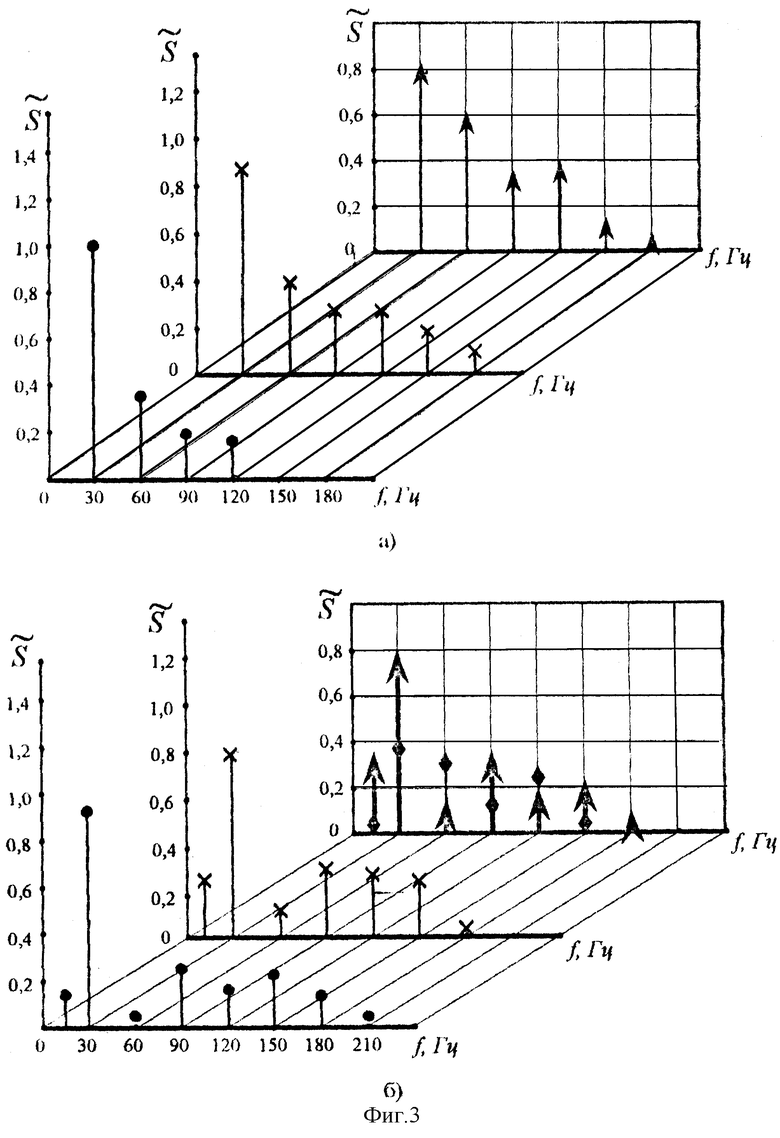
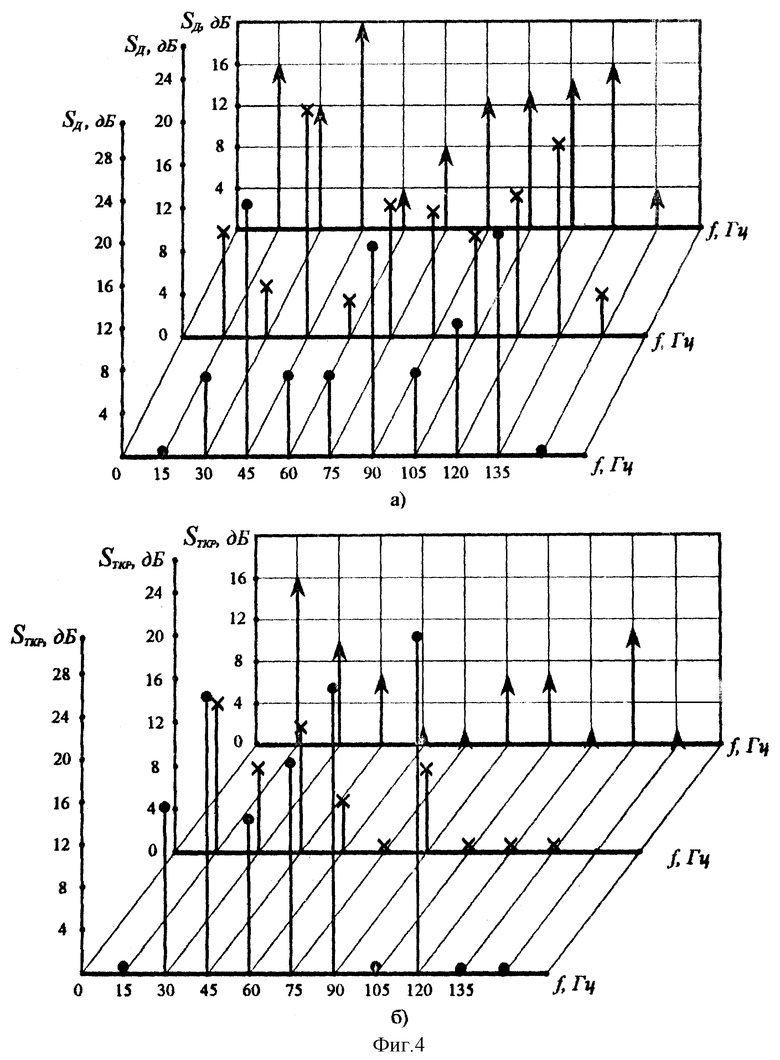
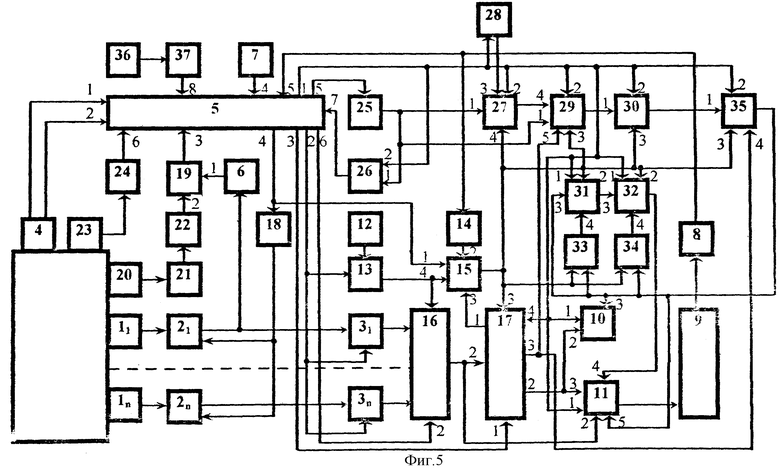
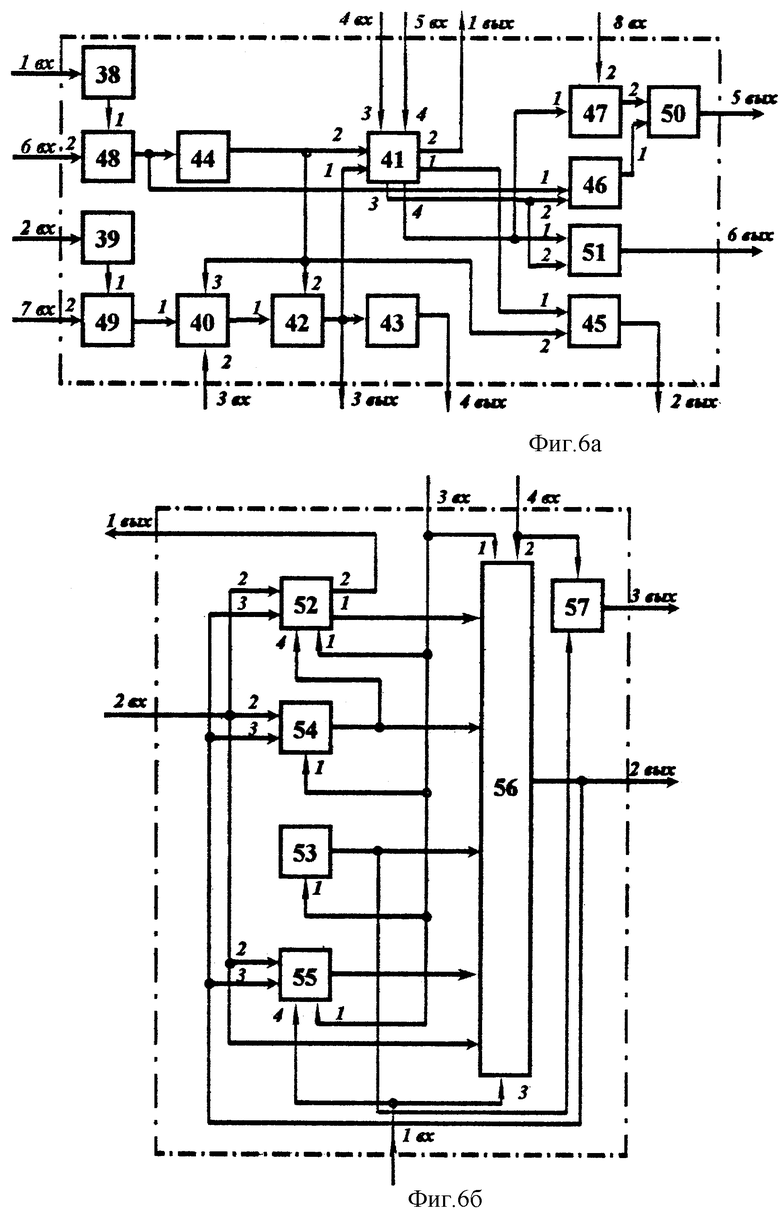
Техническое решение относится к измерительной технике, в частности к определению технического состояния поршневых двигателей путем измерения параметров, отражающих давление в цилиндрах, в эксплуатационных условиях. Изобретение позволяет упростить, снизить трудоемкость и повысить точность классификации при экспертизе технического состояния двигателей в эксплуатационных условиях. Способ основан на непрерывном измерении при многократных разгонах без нагрузки, а также динамической мощности, измерении амплитудного спектра динамической мощности, получении зависимости этих спектров от частоты вращения, сравнении полученных зависимостей с эталонными, а также с зависимостями изменения этих величин при изменении состояния двигателя и классификации его состояний по степени их близости; сравнении амплитуд гармоник спектра динамической мощности, кратных частотам переколебаний регулятора, измеренного при частоте начала срабатывания регулятора скорости с эталонными, присущими исправному регулятору, и значениями этих амплитуд при изменении состояния регулятора и классификации его состояний по степени их близости. По изменению формы зависимости спектров от частоты вращения судят об изменении угла опережения подачи топлива, по изменению амплитуд гармоник этих спектров судят о различных неисправностях двигателя и регулятора скорости. Экспертная система включает систему для регистрации и обработки индикаторных диаграмм, а также дополнительно введенные измеритель динамической мощности, блок инерционных констант, анализатор спектра, алгебраический сумматор-усреднитель, регистратор скоростных характеристик, датчик угловых меток ротора турбокомпрессора, формирователь импульсов ротора, селектор частоты вращения. 2 с. и 7 з.п. ф-лы, 6 ил.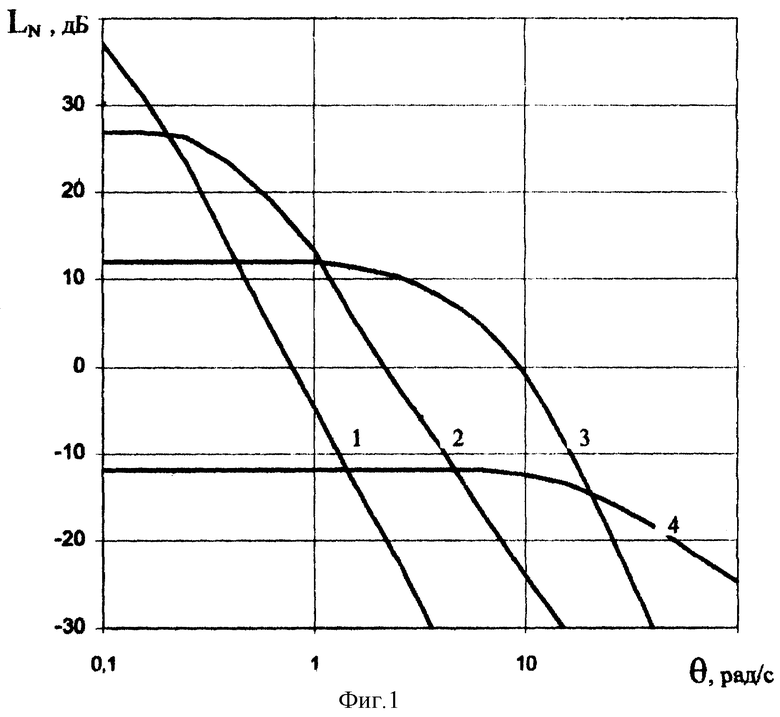
спектров динамической мощности в разгоне и выбеге и их числовые показатели с эталонными, измеренными предварительно и соотнесенными с давлениями в цилиндрах исправного нормального двигателя, а также с предварительно полученными зависимостями изменения этих величин при изменении состояния двигателя от нормального до допустимого и предельного и по степени их близости классифицируют состояние двигателя.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Система для регистрации и обработки индикаторных диаграмм | 1981 |
|
SU954839A1 |
| СПОСОБ ДИАГНОСТИКИ И ПРОГНОЗИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МАШИН ПО ВИБРАЦИИ КОРПУСА | 1996 |
|
RU2103668C1 |
| RU 2064171 C1, 20.07.1996 | |||
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2145068C1 |
| US 4539841 A, 10.09.1985 | |||
| US 5396427 A, 07.03.1995 | |||
| US 5446664 A, 29.08.1995. | |||
