Изобретение относится к летательным аппаратам для использования в качестве транспортного средства.
Известно транспортное средство для перевозки по воздуху крупногабаритных и различных многотонных грузов в жидком и сыпучем состояниях. Летательный аппарат выполнен в виде кольцевого крыла, состоящего из двух половин, соединенных в горизонтальной плоскости, выполненных из набора профилей различной кривизны, образующих аэродинамически оптимальную несущую поверхность, а силовая установка включает в себя комбинированные турбопрямоточные двигатели, встроенные в кольцевое крыло в направлении хорд профилей с одинаковым интервалом между ними, и роторные блоки, выполненные в виде многолопастных управляемых несущих винтов с реактивным приводом (См. патент РФ 2070143, "Многофункциональный летательный аппарат вертикального взлета и посадки", заявл. 08.07.1992 г., опубл. 10.12.1996 г.)
К причинам, препятствующим достижению указанного ниже технического результата, относится то, что в известном устройстве, принятом за прототип, используется силовая установка в виде турбопрямоточных двигателей с горючим рабочим телом, а подъемная сила создается за счет аэродинамики крыла и несущих винтов. Таким образом, летательный аппарат может использоваться только в воздушном пространстве. Кроме того, использование аппарата только для перевозки крупногабаритных либо жидких и сыпучих грузов сужает возможность его применения.
Задачей изобретения является создание летательного аппарата с реактивным двигателем, работа которого возможна без сжигания рабочего тела, и использование этого аппарата в качестве транспортного средства как в воздушном, так и в безвоздушном пространстве.
Технический результат, достигаемый при использовании предлагаемого изобретения, заключается в создании подъемной силы за счет реактивной тяги от выброса текучего рабочего тела, приведенного в состояние невесомости при вращении емкости с рабочим телом на вертикальной оси.
Сущность предлагаемого изобретения заключается в том, что летательный аппарат вертикального взлета и посадки, включающий в себя корпус, реактивную силовую установку и механизм управления полетом, согласно изобретению, силовая установка включает стартовый двигатель и кинематически связанную с ним кольцеобразную емкость с выполненным в ней управляемым соплом и заполненную рабочим телом, установленную на вертикальной оси с возможностью приведения ее в состояние невесомости, механизм управления полетом выполнен в виде пластин, установленных на корпусе аппарата, с возможностью их взаимодействия с выбрасываемым рабочим телом, а стартовый двигатель размещен в корпусе аппарата и/или вне его.
Сопло выполнено с возможностью управления количеством и направлением выброса рабочего тела.
В качестве рабочего возможно использование негорючего тела, например воды или речного песка.
Наличие стартового двигателя в силовой установке, кинематически связанного с кольцеобразной емкостью, установленной на вертикальной оси и заполненной рабочим телом, позволяет приводить ее во вращение и создавать центробежную силу.
При центробежной силе, превышающей силу тяжести, действующую на рабочее тело, на такую величину, что их равнодействующая (результирующая) становится перпендикулярна оси вращения, т.е. результирующие силы, действующие на каждые два диаметрально противоположные участка емкости с рабочим телом, перпендикулярны силе тяжести и направлены в противоположные стороны, следовательно, взаимно компенсируются. Это создает эффект невесомости емкости с рабочим телом.
Выполнение в емкости сопла позволяет выбрасывать рабочее тело и создавать реактивную тягу.
Выполнение механизма управления полетом в виде пластин, установленных на корпусе аппарата с возможностью их взаимодействия с выбрасываемым рабочим телом, позволяет управлять перемещением аппарата в горизонтальной плоскости и ориентировать его в пространстве.
Размещение стартового двигателя в корпусе аппарата и/или вне его расширяет возможность его применения как для сообщения необходимой скорости вращения емкости, так и для ее поддержания.
Управление направлением выброса позволяет создавать касательную составляющую реактивной тяги и также управлять скоростью вращения емкости и соответственно центробежной силой.
Выполнение сопла с управляемой пропускной способностью позволяет регулировать объем выбрасываемого рабочего тела и тем самым изменять силу реактивной тяги.
Использование различных текучих либо сыпучих материалов в качестве рабочего тела расширяет диапазон применяемых рабочих тел.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах заявляемого изобретения, позволил установить, что заявитель не обнаружил аналог, характеризующийся признаками, тождественными всем существенным признакам заявляемого изобретения, что соответствует критерию "новизна". Результаты поиска показали также, что заявленное изобретение не вытекает для специалиста явным образом из известного уровня техники, что соответствует условию "изобретательский уровень".
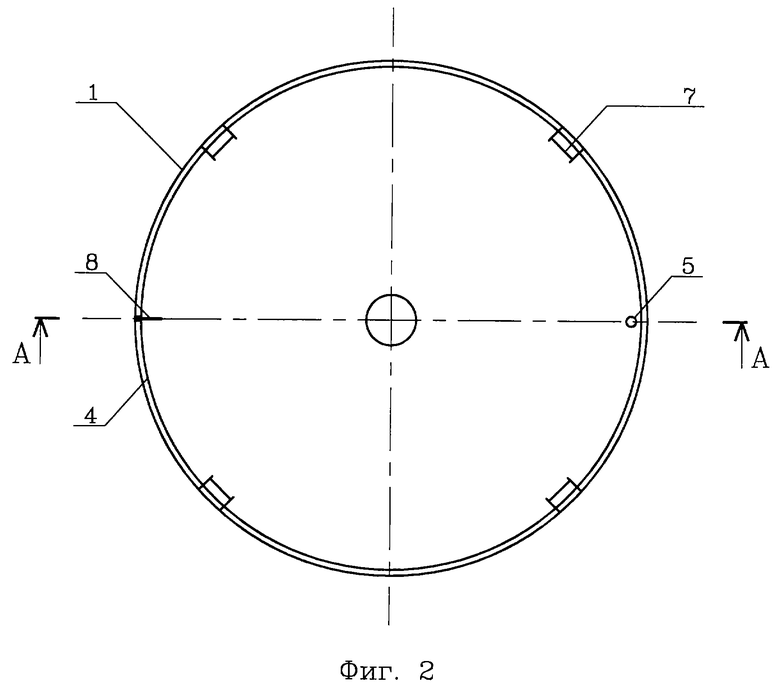
Предлагаемое устройство представлено на чертежах: фиг.1 - общий вид летательного аппарата в разрезе; фиг.2 - летательный аппарат, вид снизу.
Летательный аппарат на фиг.1 представляет собой корпус 1 с силовой установкой 2, состоящей из кольцеобразной вращающейся на оси 3 емкости 4. В емкости 4 на максимальном расстоянии от оси вращения 3 расположено сопло 5 с регулируемой пропускной способностью и возможностью изменения направления выброса рабочего тела 6. На корпусе 1 расположены пластины 7 (фиг.2) с возможностью управления их углом наклона, управляющие перемещением аппарата в горизонтальной плоскости. На корпусе 1 также размещена пластина 8 (фиг.2) для управления ориентацией аппарата вокруг оси 3. Силовая установка 2 включает в себя также стартовый двигатель (на схеме не показан), который может располагаться как в корпусе 1 аппарата, так и автономно на земле с возможностью передачи вращения кольцеобразной емкости 4.
Летательный аппарат работает следующим образом. Кольцеобразную емкость 4, установленную на вертикальной оси 3, заполняют рабочим телом 6, например водой. Включают стартовый двигатель, располагающийся в корпусе 1 аппарата либо вне его, приводят во вращение емкость 4 с рабочим телом 6. Емкость 4 раскручивается до минимально необходимой угловой скорости, при которой равнодействующая сил тяжести и центробежной, действующих на каждый участок жидкости, будет перпендикулярна оси вращения и соответственно силе тяжести.
Когда емкость 4 раскручена до необходимой скорости, открывают клапан на сопле 5, и рабочее тело 6 под действием центробежной силы начинает вытекать из емкости 4. Струя вытекающей жидкости сообщает аппарату импульс движения, направленный вдоль оси вращения. Меняя пропускную способность сопла 5, можно регулировать количество вытекающей жидкости, тем самым изменяя силу тяги, и управлять перемещением летательного аппарата в вертикальном направлении.
Управление перемещением летательного аппарата в горизонтальном направлении осуществляется следующим образом. При синхронном изменении угла наклона диаметрально противоположных пластин 7, расположенных с интервалом в 90 o под емкостью 4, струя жидкости, бьющая в них, сообщает аппарату горизонтальное направление движения.
Управление ориентацией корпуса аппарата относительно оси 3 осуществляется воздействием струи на пластину 8, расположенную радиально к окружности, описываемой соплом 5.
Управление ориентацией оси 3 в пространстве осуществляется несинхронным изменением угла наклона диаметрально противоположных пластин 7.
Стартовым двигателем совершается основная работа по раскручиванию емкости с рабочим телом до необходимой угловой скорости, пока аппарат находится на земле.
Для поддержания этой угловой скорости в дальнейшем необходимо совершать работу по преодолению силы трения емкости о внешнюю среду. Для этого используется сопло 5 или стартовый двигатель, если он расположен в корпусе аппарата.
Т.к. равнодействующие сил тяжести и центробежных сил, действующие на каждые два диаметрально противоположных участка емкости с жидкостью, направлены перпендикулярно действию силы тяжести и в противоположные стороны, то они взаимно компенсируются, следовательно, при полете требуется совершение работы только на преодоление силы тяжести, действующей на летательный аппарат без учета веса емкости с рабочим телом, что требует значительно меньшей мощности реактивной тяги. При этом создание реактивной тяги возможно как со сжиганием, так и без сжигания выбрасываемого рабочего тела.
Пример конкретного выполнения:
внутренний радиус емкости R=1 м;
частота вращения емкости ν=1800 об/мин=30 об/с;
центростремительное ускорение (ац) перпендикулярно ускорению свободного падения (g):
α - угол между центростремительным ускорением (ац) и результирующей центростремительного ускорения и ускорения свободного падения (g+ац).
Т. к. центростремительное ускорение перпендикулярно ускорению свободного падения по условию, то они являются катетами, а их результирующая - гипотенузой прямоугольного треугольника, тогда
tgα=g/ац=9,8/35494,56=0,000276,
α<1', следовательно, m(g+aц)┴mg,
где m - масса одного из любых двух диаметрально противоположных участков емкости с рабочим телом,
что и требуется для достижения эффекта невесомости емкости с рабочим телом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2014 |
|
RU2547964C1 |
| СПОСОБ СТАРТА ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2014 |
|
RU2547963C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| СПОСОБ СОЗДАНИЯ ТЯГИ И СИЛОВАЯ УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2680214C1 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
| ВОЗДУШНО-КОСМИЧЕСКАЯ ТРАНСПОРТНАЯ СИСТЕМА | 1994 |
|
RU2111147C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ И НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ (НВА) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2127202C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2617014C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2518143C2 |
| КРЫЛАТАЯ РАКЕТА | 2013 |
|
RU2534838C1 |
Изобретение относится к летательным аппаратам. Аппарат вертикального взлета и посадки включает корпус, реактивную силовую установку и механизм управления полетом. Силовая установка включает стартовый двигатель и кинематически связанную с ним кольцеобразную емкость с выполненным в ней соплом и заполненную рабочим телом с возможностью приведения рабочего тела в состояние вращения относительно вертикальной оси и его последующего выброса через сопло. Механизм управления полетом выполнен в виде пластин, установленных на корпусе аппарата, с возможностью взаимодействия с выбрасываемым рабочим телом. Стартовый двигатель размещен в корпусе аппарата и/или вне его. Сопло выполнено с возможностью управления количеством и направлением выброса рабочего тела. Изобретение направлено на расширение арсенала технических средств. 2 з.п.ф-лы, 2 ил.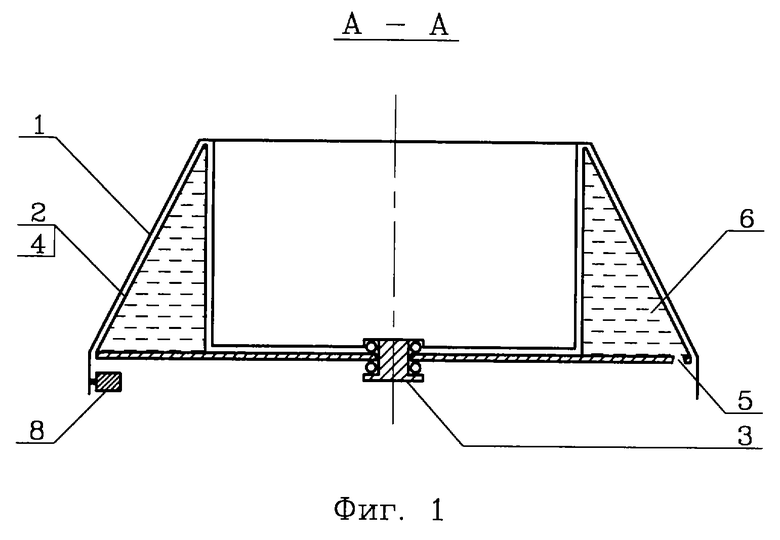
| МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 1992 |
|
RU2070143C1 |
| US 3123320 A, 03.03.1964 | |||
| DE 3344740 A1, 20.06.1985 | |||
| US 2946191 A, 26.06.1960. | |||

