Изобретение относится к транспортным средствам самолетной схемы, предназначенным для эксплуатации на ближних и средних маршрутах для перевозки увеличенного потока пассажиров и грузов. Более точно оно относится к способам улучшения аэродинамических и транспортных характеристик аппаратов самолетного типа, использующих эффект экрана над водой и твердой поверхностью и названных по особенностям движения наземно-воздушными амфибиями (НВА), за счет выполнения в них новых конструктивных элементов, а также обеспечения характеристик устойчивости и управляемости при взлете, крейсерском полете и посадке. Такие летательные аппараты способны производить взлет и посадку на аэродромах любой категории или совсем без аэродромов, нести на борту повышенное количество пассажиров или грузов за счет улучшенных несущих и эксплуатационных свойств, что обеспечивает экономичность перевозок.
Известны способ улучшения аэродинамического качества летательного аппарата и конструкция летательного аппарата для его осуществления (см. описание изобретения по международной заявке N 096/33896 по кл. МПК B 60 V 1/08, международная публикация 31.10.96).
Известный способ повышения аэродинамического качества летательного аппарата заключается а том, что в процессе полета летательного аппарата между его крылом и экранирующей поверхностью создают зону повышенного давления. При достижении скорости полета, превышающей скорость экранного полета, часть воздуха из зоны повышенного давления отводят. Отводимую часть воздуха ускоряют до скорости, превышающей скорость набегающего потока воздуха, а затем выпускают на верхнюю поверхность крыла в направлении к его задней кромке. Летательный аппарат содержит крыло, включающее в себя продольные и поперечные силовые элементы, а также каналы, расположенные между продольными силовыми элементами.
Недостатком известного способа и летательного аппарата для его осуществления является падение аэродинамического качества с ростом скорости до значений, близких к самолетным. Это происходит вследствие увеличения динамической составляющей подъемной силы при увеличении скорости полета, что в свою очередь приводит к увеличению высоты полета, при этом экранная составляющая подъемной силы уменьшается.
Известен также способ оптимизации аэродинамических и транспортных характеристик летательного аппарата путем изменения его конструктивных элементов (см. описание изобретения к международной заявке WO N 97/17241 по кл. МПК B 60 V 1/08, международная публикация 15.08.97). Аппарат содержит корпус, хвостовое оперение, крылья, расположенные по обе стороны от корпуса и имеющие в плане форму треугольника. Угол атаки крыла выполнен переменным, величина его возрастает по мере приближения к корпусу.
Однако такой летательный аппарат приспособлен для полетов только в зоне эффекта экрана и не может летать вне его.
Наиболее близким по технической сущности из обнаруженных аналогов является способ улучшения аэродинамической и транспортной эффективности летательного аппарата самолетного типа, воплощенный, например в конструкции пассажирского самолета типа Як-42М или его аналога - пассажирского самолета Боинг-737-300. Известные транспортные средства содержат в своей конструкции самые передовые технические решения, направленные на улучшение аэродинамических и транспортных характеристик. В частности, эти самолеты используют высокомеханизированное крыло, обеспечивающее аэродинамическое качество в крейсерском полета до величины K=19, что позволяет перевозить 150-170 пассажиров на дальность 2500 - 4000 км с расходом топлива на 1 пассажиро/км 18,5 - 21 грамм. Аппарат содержит фюзеляж, крылья с элементами управления, хвостовой стабилизатор, газотурбинную силовую установку. Такой аппарат имеет взлетную массу 63,6 тонн.
Недостатком известных летательных аппаратов самолетного типа является высокая дороговизна перевозок из-за низкой транспортной эффективности самих устройств, которая объясняется необходимостью иметь или выполнять для их эксплуатации следующее:
1) дорогие взлетно-посадочные поля со всеми сложнейшими навигационными системами и службами обеспечения;
2) операции перегрузки-перевалки грузов на другие транспортные средства или в терминалы для последующей погрузки в другие транспортные средства;
3) строительство энергоемких и дорогостоящих аэропортов и подъездных путей, что в свою очередь требует отчуждения значительных площадей земель, уничтожения лесов, растительности;
4) требование высоких профессиональных знаний, навыков, хорошего здоровья кадрового состава для эксплуатации самолета, обладающего высокой степенью сложности; особенно это касается пилотирования при выполнении взлета и посадки, поскольку оно осуществляется традиционно сложным способом;
5) высокий уровень опасности, которому подвергаются люди и груз при транспортировке их на больших высотах, а также при взлете и посадке;
6) высокая степень энерговооруженности самолетов требует больших расходов углеводородных топлив, затрачиваемых на единицу массы перевозимого груза; при этом доля полезного груза от массы летательного аппарата самой совершенной конструкции оставляет всего 20 - 25% при транспортировке на заявляемую дальность;
7) длительные сроки окупаемости и строительства, связанные с высокой себестоимостью их разработки и строительства, длительные сроки создания, а также высокая стоимость эксплуатации.
Задачей настоящего изобретения является разработка способа создания системы сил летательного аппарата самолетной схемы с целью улучшения его аэродинамических, конструктивных и транспортных характеристик, эффективного способа управления его движением, а также обеспечение характеристик устойчивости и управляемости как вблизи экрана, так и вне его. Предлагаемый способ создания системы сил включает создание подъемных, тянущих и управляющих сил, обеспечивающих взлет летательного аппарата, посадку, движение и маневрирование.
Другой задачей изобретения является разработка нового летательного аппарата самолетной схемы, лишенного недостатков самолета-прототипа и оснащенного по принципу наземно-воздушной амфибии (НВА), который позволяет осуществлять:
взлет и посадку с неподготовленных поверхностей;
движение не только в приземном режиме с высоким аэродинамическим качеством, но и в режиме свободного полета;
стабилизацию полета и упрощенное управление движением летательного аппарата на всех режимах, включая взлет и посадку;
экономичность транспортировки пассажиров и грузов на значительные расстояния и увеличение безопасности полетов.
Для решения этих задах летательному аппарату самолетной схемы придают свойства наземно-воздушной амфибии (НВА) и создают ему систему сил, включающую подъемные, тянущие и управляющие силы, за счет выполнения следующего:
- обеспечивают газодинамическую передачу энергии от газогенераторов к подъемным движителям-вентиляторам, маршевому движителю и к устройству для создания газоструйной завесы;
- по концевым частям крыла располагают дополнительные грузопассажирские модули;
- эти модули и фюзеляж компонуют в виде аэродинамических профилей;
- образуют газоструйные завесы и под нижними несущими поверхностями аппарата создают статическую воздушную подушку;
- сдувают пограничный слой с верхних поверхностей;
- подъемные движители-вентиляторы располагают вблизи днища аппарата;
- создают реактивную струю, направленную в сторону опорной поверхности и обеспечивают отрыв аппарата и маневрирование вблизи опорной поверхности;
- перераспределяют подвод энергии между подъемными движителями-вентиляторами и маршевым движителем и осуществляют движение аппарата;
- отключают подъемные движители-вентиляторы и передают всю энергию на привод маршевого движителя, осуществляют крейсерский полет аппарата вблизи экрана на расстоянии, меньшем средней хорды крыла от опорной поверхности, и обеспечивают высокое аэродинамическое качество летательного аппарата в целом;
- рули высоты и направления располагают в зоне действия реактивной струи, отбрасываемой маршевым движителем, и обеспечивают управление аппаратом во всем диапазоне скоростей движения;
- изменяют угол атаки аппарата, подают номинальную мощность на привод маршевого движителя и выполняют свободный самолетный полет на высотах, превышающих среднюю хорду крыла;
- распределяют действие создаваемых подъемных сил по конструкции аппарата и меняют структуру напряжений в элементах конструкции аппарата путем создания дополнительных подъемных сил в местах концентрации силовых нагрузок, то есть придают фюзеляжу и навесным модулям положительный угол атаки.
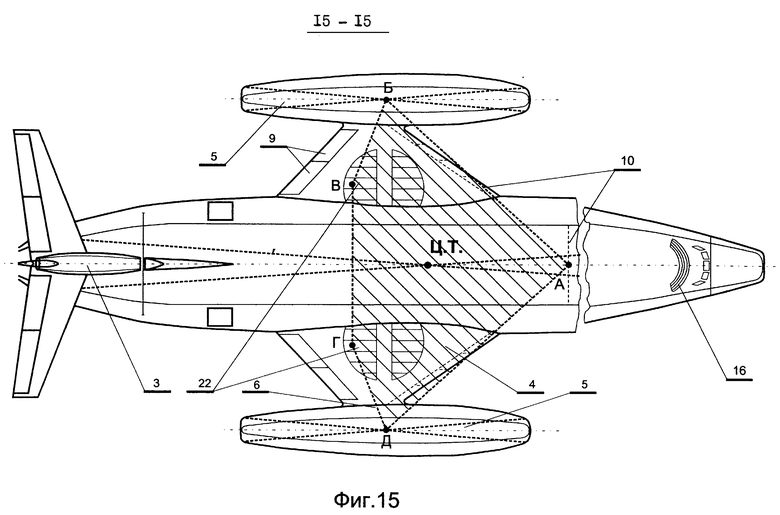
В качестве варианта осуществления способа создания системы подъемных сил летательного аппарата располагают центр масс летательного аппарата внутри периметра геометрической фигуры, образованной точками приложения несущих сил, действующих на элементы планера, и обеспечивают устойчивое движение аппарата, в том числе на малых скоростях движения. При этом центр тяжести масс располагают впереди точки приложения результирующей подъемной силы и обеспечивают управляемость аппарата. Лопасти подъемных движителей-вентиляторов выполняют с большой хордой, например, саблевидной формы, используют эффект экрана при нахождении аппарата вблизи опорной поверхности, доводят скорость вращения на концах лопастей вентилятора до значений, близких к скорости звука, и получают дополнительную подъемную силу. Кроме того, создают статическую воздушную подушку как минимум в трех независимых друг от друга камерах, центры приложения сил камер располагают симметрично относительно продольной оси аппарата и не на одной прямой, а например по принципу трехопорного шасси, чем обеспечивают устойчивость аппарата при работе на воздушной подушке. Увеличивают площадь крыла за счет выпуска впереди закрылков и создают под ним воздушную подушку, чем увеличивают подъемную силу крыла. Создают дополнительные силы на входном и/или выходном устройствах подъемных движителей-вентиляторов, направленные перпендикулярно направлению движения аппарата в плоскости, параллельной опорной поверхности, и перемещают аппарат в одном из этих направлений.
Летательный аппарат самолетной схемы выполнен в виде наземно-воздушной амфибии (НВА), в котором реализован заявляемый способ создания системы сил, содержит фюзеляж с пассажирскими кабинами и/или дополнительными отсеками, несущее крыло, силовую, установку с газогенераторами, снабженными воздухозаборниками, киль, стабилизатор, элерон-закрылки, рули высоты и направления. При этом крыло выполнено с шайбами на концах с прикрепленными к ним навесными съемными модульными секциями. Фюзеляж и навесные модульные секции выполнены в виде аэродинамических несущих профилей с большой среднеаэродинамической хордой и имеют собственные нижние несущие поверхности с углом атаки больше 0o, но меньше угла атаки крыла. Крыло выполнено с малым удлинением и увеличенной хордой, снабжено щитками, элерон-закрылками и предкрылком-интерцептором. Крыло на стыке с фюзеляжем имеет вертикально расположенные сквозные кольцевые каналы, в которых установлены подъемные движители-вентиляторы с приводами от свободных турбин. Эти вентиляторы выполнены несущими и установлены в зоне влияния экрана.
Фюзеляж и крыло имеют нижнюю поверхность, разделенную скегами, щитками и элерон-закрылками на участки, ограничивающие три независимые камеры статической воздушной подушки, которые расположены по принципу трехопорного колесного шасси и снабжены устройством для создания регулируемой газоструйной завесы. Фюзеляж оборудован передними и задними щитками с выполненными в них соплами для удержания воздушной подушки с помощью истекающих из сопел в виде сплошной завесы газовых струй. Каждый из двух подъемных движителей-вентиляторов расположен над двумя указанными камерами воздушной подушки одновременно, а именно над камерой крыла и камерой фюзеляжа. Такое конструктивное решение позволяет надувать самую большую камеру воздушной подушки под фюзеляжем сразу двумя вентиляторами.
Силовая установка включает в себя газогенераторы, маршевый движитель и два подъемных движителя-вентилятора с использованными механизмами, например, в виде свободных турбин. Все указанные механизмы соединены между собой газопроводами с газораспределительными устройствами. Силовая установка выполнена с развитой проточной частью как на входе в газогенераторы, так и на выходе. Проточная часть имеет пространственные повороты, а ее внутренняя и наружная поверхности покрыты адгезионным и теплоотражающим слоем, обеспечивающим газопроводам термостатирующие свойства. Газогенераторы расположены внутри фюзеляжа в районе центра тяжести аппарата. Воздухозаборники газогенераторов объединены в общий воздухоприемный канал и вынесены в лобовую часть фюзеляжа в зоне возможного срыва пограничного потока воздуха. Воздухозаборники встроенных в крыло указанных вентиляторов снабжены жалюзийными решетками.
В качестве одного из вариантов исполнения предлагаемой конструкции наземно-воздушной амфибии (НВА) воздухоприемный канал может быть выполнен прямоугольным в своем поперечном сечении и расположен по всему размаху верхней дужки фюзеляжа. Внутри воздухоприемный канал снабжен воздухоочистительным устройством, выполненным, например в виде сепаратора. Элерон-закрылки, щитки и скеги по всему периметру снабжены калиброванными соплами, которые расположены в несколько рядов в шахматном порядке с постоянным шагом и соединены с газопроводом с выходами от приводов вентиляторов. При этом сопла расположены так, что выдувают отработанный газ под углом к вертикали в сторону области повышенного давления воздушной подушки. Каждая лопасть подъемного движителя-вентилятора, а их всего шесть в каждом вентиляторе, выполнена с увеличенной хордой и имеет саблевидную форму в плане и переменный угол атаки по размаху. Элерон-закрылки и щитки с калиброванными соплами распложены поперек между продольными скеговыми ограждениями и служат устройством для запирания камер воздушной подушки. Передние щитки выполнены с возможностью поворота на угол более 90o относительно горизонтальной плоскости. Щитки и элерон-закрылки устройства для создания газоструйной завесы камер воздушной подушки выполнены регулируемыми в отношении положения к вертикальной плоскости. По передней части крыла по всему размаху расположен предкрылок-интерцептор, образующий при отклоненных щитках регулируемое щелевое сопло.
Краткое описание чертежей.
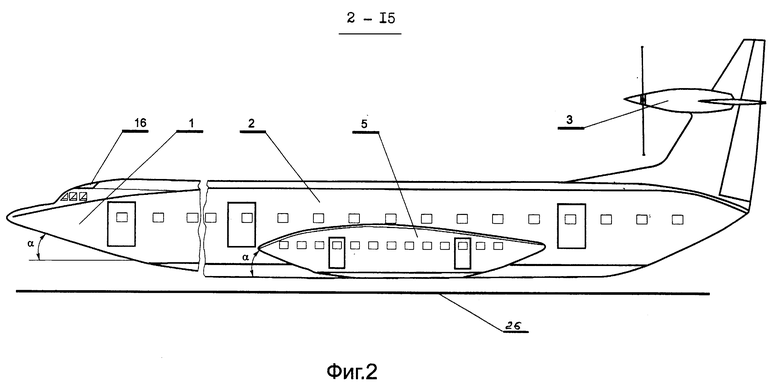
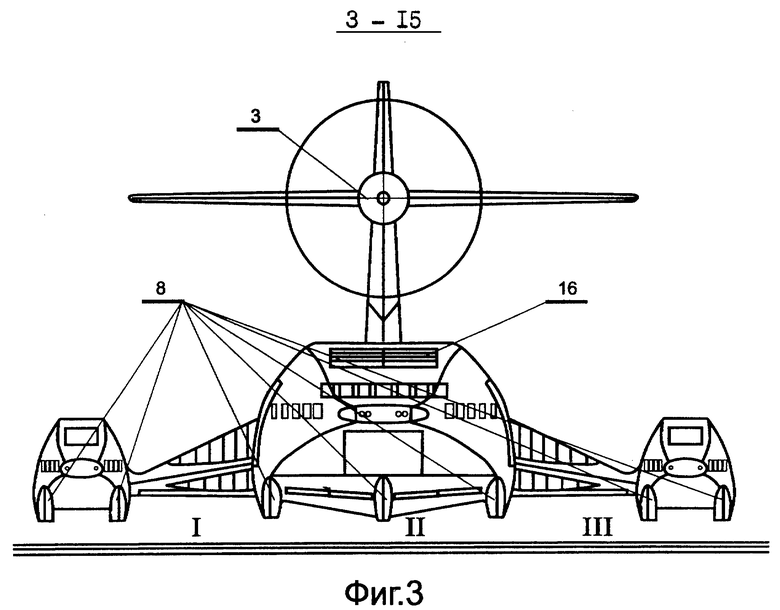
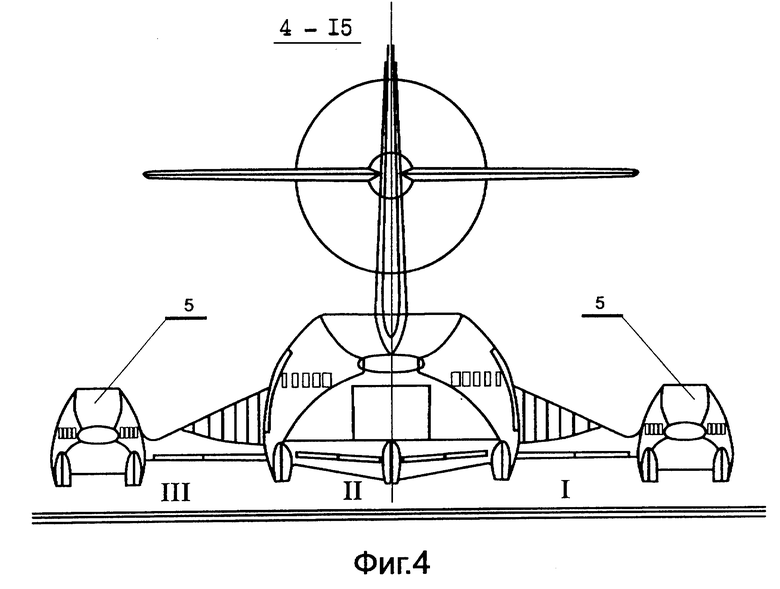
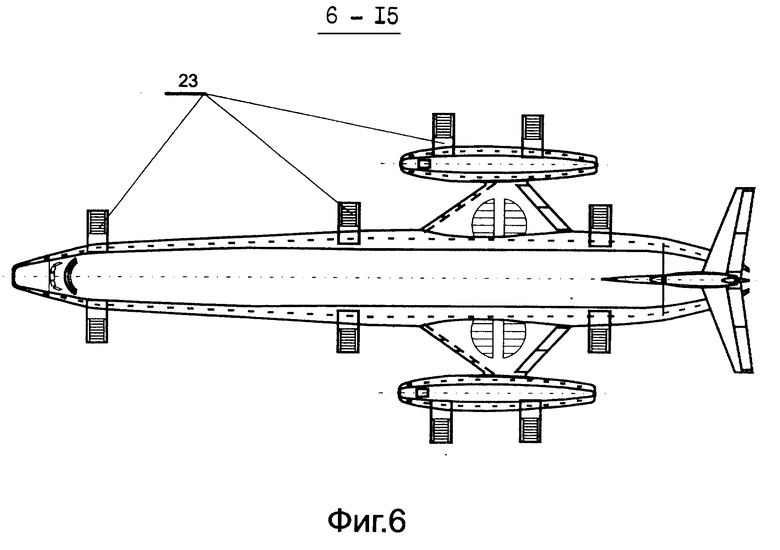
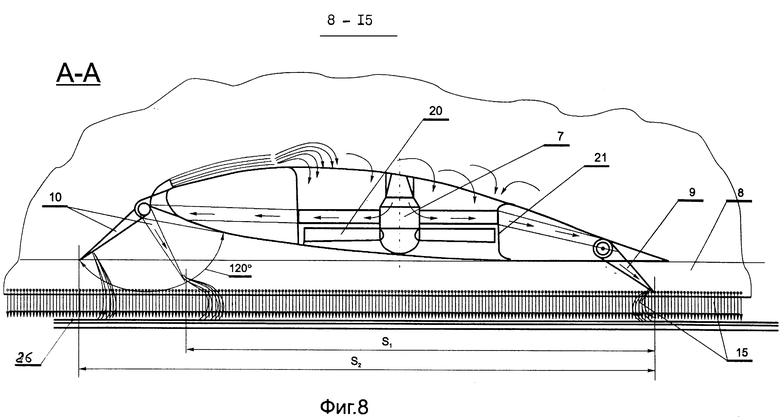
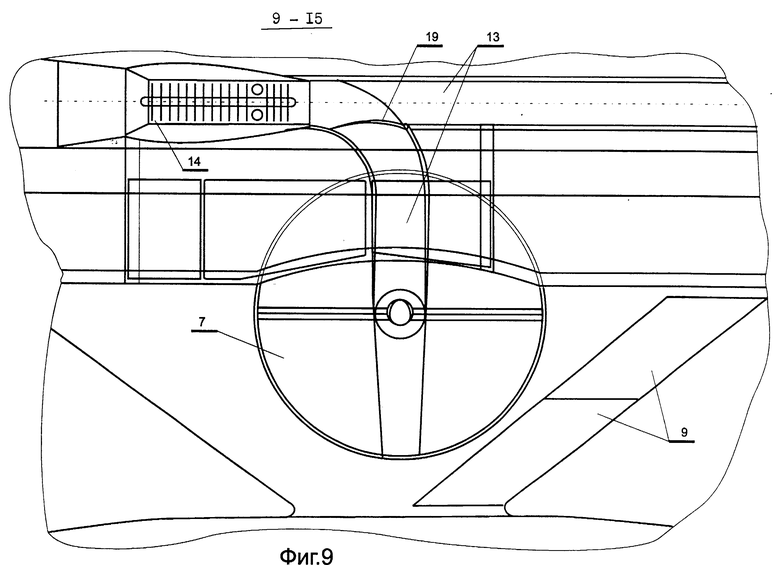
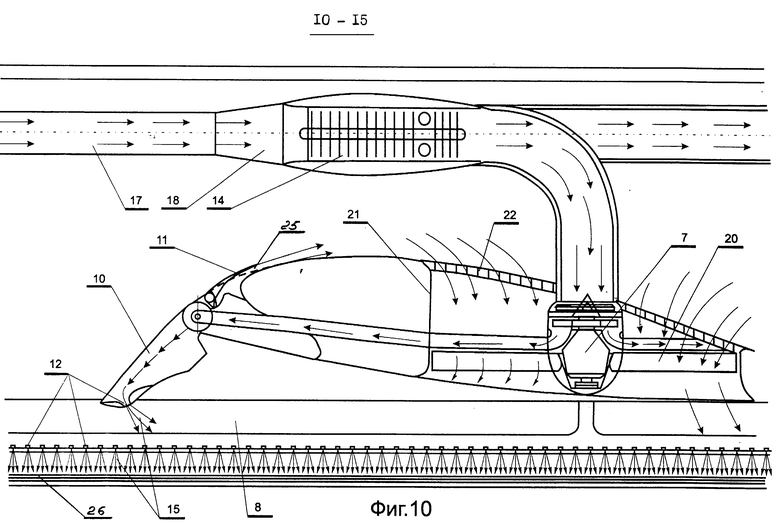
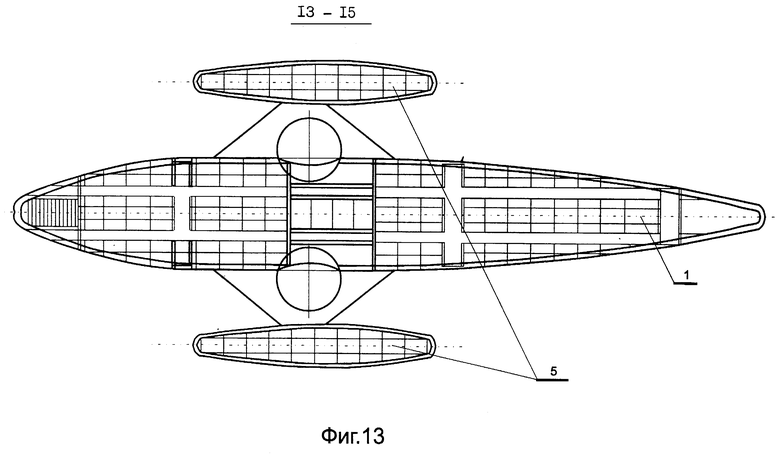
На чертежах схематично изображен летательный аппарат самолетной схемы, выполненный в виде наземно-воздушной амфибии (НВА), в конструкции которого реализован предлагаемый способ создания системы сил, обеспечивающих комплексное улучшение аэродинамических и транспортных характеристик летательного аппарата нового типа: фиг. 1 - схема летательного аппарата НВА, общий вид в плане; фиг. 2 - то же, что на фиг. 1, вид сбоку; фиг. 3 - то же, что на фиг. 1, вид спереди; фиг. 4 - то же, что на фиг. 1, вид сзади; фиг. 5 - схема летательного аппарата НВА, вид сбоку с выпущенной грузовой аппарелью; фиг. 6 - то же, что на фиг. 5, вид в плане на выпущенные трапы; фиг. 7 - поперечное сечение по оси подъемного движителя-вентилятора; фиг. 8 - сечение А-А по фиг. 1, газоструйная завеса воздушной подушки; фиг. 9 - фрагмент компоновки силовой установки, газогенератор, газораспределительное устройство, подъемный движитель-вентилятор и газопровод, вид в плане; фиг. 10 - то же, что на фиг. 9, вид сбоку; фиг. 11 - то же, что на фиг. 1, вид снизу; фиг. 12 - схема расположения лопастей подъемного движителя-вентилятора, вид в плане; фиг. 13 - схема летательного аппарата НВА, схема палубы в плане и схема расположения пассажирских кресел; фиг. 14 - график сравнения характеристик различных летательных аппаратов; фиг. 15 - схема расположения точек приложения подъемных сил и центра тяжести НВА.
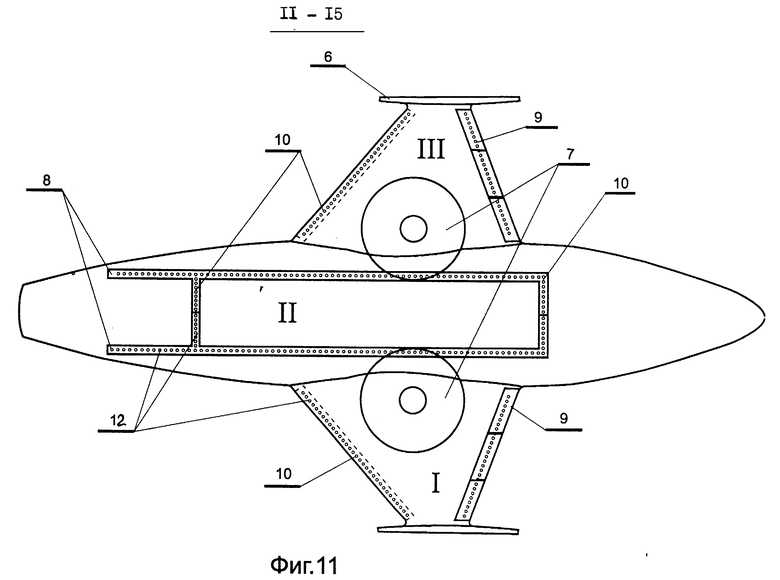
Летательный аппарат самолетной схемы, например наземно-воздушная амфибия НВА, содержит фюзеляж 1 с пассажирскими кабинами и/или грузовыми отсеками 2 и маршевым движителем 3. Несущее крыло 4 выполнено с малым удлинением и имеет на концах навесные пассажирские или грузовые модульные секции 5, прикрепленные к шайбам 6. Взлетно-посадочное устройство выполнено в виде несущих подъемных движителей-вентиляторов 7, расположенных на стыке фюзеляжа 1 и крыла 4. Нижние несущие поверхности фюзеляжа 1 и модулей 5, ограниченные продольными скегами 8, имеют установочный угол атаки α больше 0o, но меньше угла атаки крыла. Несущее крыло 4 имеет в плане стреловидность по передней и задней кромкам и оборудовано элерон-закрылками 9. На передней части фюзеляжа 1 и несущего крыла 4 установлены подвижные щитки 10 и предкрылок-интерцептор 11. Элерон-закрылки 9, щитки 10 и скеги 8 снабжены калиброванными соплами 12, которые расположены в несколько рядов в шахматном порядке с постоянным шагом и соединены газопроводом 13 с газогенератором 14. Комбинация указанных калиброванных сопел на щитках 10, скегах 8 и элерон-закрылках 9 с подводящими газопроводами отработанных газов от вентиляторов и системой управления их работой является устройством для создания регулируемой газоструйной завесы 15, ограждающей по периметру три независимые камеры статической воздушной подушки I, II и III. Благодаря подвижности элерон-закрылков 9 и щитков 10 газоструйная завеса 15 получает возможность быть регулируемой в отношении положения к вертикальной плоскости. Выход газа из калиброванных сопел 12 направлен под углом к вертикали в сторону повышенного давления воздушной подушки.
Газогенераторная установка 14 имеет развитую проточную часть как на входе, так и на выходе, при этом проточная часть имеет пространственные повороты, а ее поверхность покрыта адгезионным и теплоотражающим слоем, обеспечивающим термостатирующие свойства.
Щитки 10 и элерон-закрылки 9 расположены поперек между продольными скеговыми ограждениями 8, что придает им функции устройства для запирания камер I, II, III воздушной подушки по всему периметру. При этом камеры I, II, III расположены по принципу трехопорного колесного шасси, что придает устойчивость аппарату при движении с использованием воздушной подушки. Газогенераторы 14 расположены внутри корпуса фюзеляжа 1 в районе центра тяжести аппарата и снабжены воздухозаборниками 16, которые вынесены в лобовую часть фюзеляжа 1 в зону возможного срыва пограничного слоя воздуха и расположены по всему размаху верхней дужки фюзеляжа 1. Воздухозаборники 16 газогенераторов 14 объединены в общий воздухоприемный канал 17 и имеют прямоугольное сечение. В воздухоприемном канале 17 установлено воздухоочистительное устройство, например в виде сепаратора 18, а также газораспределительное устройство 19 в виде подвижной заслонки. Лопасти 20 подъемных движителей-вентиляторов 7 выполнены с увеличенной хордой и имеют саблевидную форму в плане и переменный угол атаки по размаху. Подъемные движители-вентиляторы 7 размещены на стыке фюзеляжа и крыла и установлены в сквозных кольцевых каналах 21, имеющими сквозной выход как на верхнюю, так и на нижнюю поверхности крыла и фюзеляжа. Воздухозаборники встроенных в крыло вентиляторов 7 снабжены жалюзийными решетками 22. Как фюзеляж 1, так и навесные модули 5 снабжены многочисленными трапами 23 и аппарелью 24. При отклоненных щитках 10 предкрылок-интерцептор 11 образует регулируемое щелевое сопло 25, через которое осуществляется сдув пограничного слоя с верхних поверхностей крыла. Опорная поверхность 26 служит базой для статической воздушной подушки и для создания эффекта экрана от давления воздуха, зажатого между опорной поверхностью и планером (днищем фюзеляжа, крыла и навесных модулей) летательного аппарата.
В соответствии с заявляемыми способами разработан и экспериментально проверен проект наземно-воздушной амфибии, например взлетным весом 60 тонн (НВА-60). В нем впервые реализованы признаки летательного аппарата самолетной схемы: наличие фюзеляжа, крыла с его подъемной силой, оснащенного элементами механизации, киля, стабилизатора. В то же время это грузопассажирский экраноплан с вертикальным взлетом и посадкой, представляющий собой цельнометаллический свободнонесущий моноплан с низкорасположенным крылом и однокилевым оперением обычной схемы.
Если рассматривать широкую нижнюю экранируемую поверхность фюзеляжа как плоскость большой хорды, то ее движение в свободном полете обеспечит значительное приращение подъемной силы, которое еще больше увеличивается в режиме полета в зоне экрана.
Систему подъемных сил летательного аппарата усиливают приданием ему свойств наземно-воздушной амфибии, обладающей статической многокамерной воздушной подушкой, использующей эффект воздействия экрана от нахождения планера вблизи опорной поверхности, а также наличием сплошной газоструйной завесы по периметру камер воздушной подушки. Разгон, торможение и маневрирование осуществляют после отрыва аппарата от поверхности с помощью многокамерной воздушной подушки с газоструйным ограждением. Кроме того, повышают несущие свойства крыла и дополнительно придают несущие свойства фюзеляжу и навесным модульным секциям на концах крыла. Создают повышенное статическое давление под крылом и фюзеляжем, используют реактивную силу массы воздуха от несущих подъемных движителей-вентиляторов, снабжают лопасти несущих вентиляторов аэродинамической подъемной силой. Подачу и распределение мощности от газогенераторов к исполнительным механизмам - свободным турбинам маршевого движителя и подъемных движителей-вентиляторов - осуществляют газодинамическим путем. Организуют интенсивный отсос пограничного слоя с верхней дужки крыла, направляя его в вертикальные сквозные кольцевые каналы вентиляторов. Обдувают верхнюю поверхность крыла через щелевое сопло предкрылка-интерцептора (от слова intercept - перехват, пересечение). Разгружают все места концентрации нагрузки, а именно фюзеляж и навесные модульные секции на концах крыла, путем создания в них собственной дополнительной подъемной силы за счет придания им аэродинамических профилей. Из фиг. 15 видно, что центр тяжести масс летательного аппарата располагают внутри периметра геометрической фигуры АБВГД, образованной точками приложения несущих сил, действующих на элементы планера, при этом его располагают впереди точки приложения результирующей подъемной силы. Этим обеспечиваются управляемость аппарата и его устойчивое движение, в том числе и на малых скоростях полета.
Управляют движением предлагаемого летательного аппарата путем изменения подъемной силы и тяговых усилий. При этом организуют три принципиально различных режима движения: крейсерский полет в зоне влияния экрана, переходные режимы движения, с помощью которых осуществляют отрыв от поверхности, маневрирование, разбег, торможение и посадку, а также самолетный полет вне зоны влияния экрана. На всех трех режимах управляют полетом с использованием природной взаимосвязи трех параметров движения: скорости, массы и высоты с учетом дополнительных несущих свойств от использования эффекта экрана. При этом форсируют работу газогенераторов для одновременного обеспечения реверсивного режима маршевого движителя и работы подъемных движителей-вентиляторов в процессе торможения до нулевой скорости. После торможения осуществляют маневрирование путем частичной передачи мощности на маршевый движитель, а при посадке полностью отключают маршевый движитель и плавно переводят газогенераторы на режим работы с минимальной мощностью до полной их остановки при касании летательного аппарата с поверхностью.
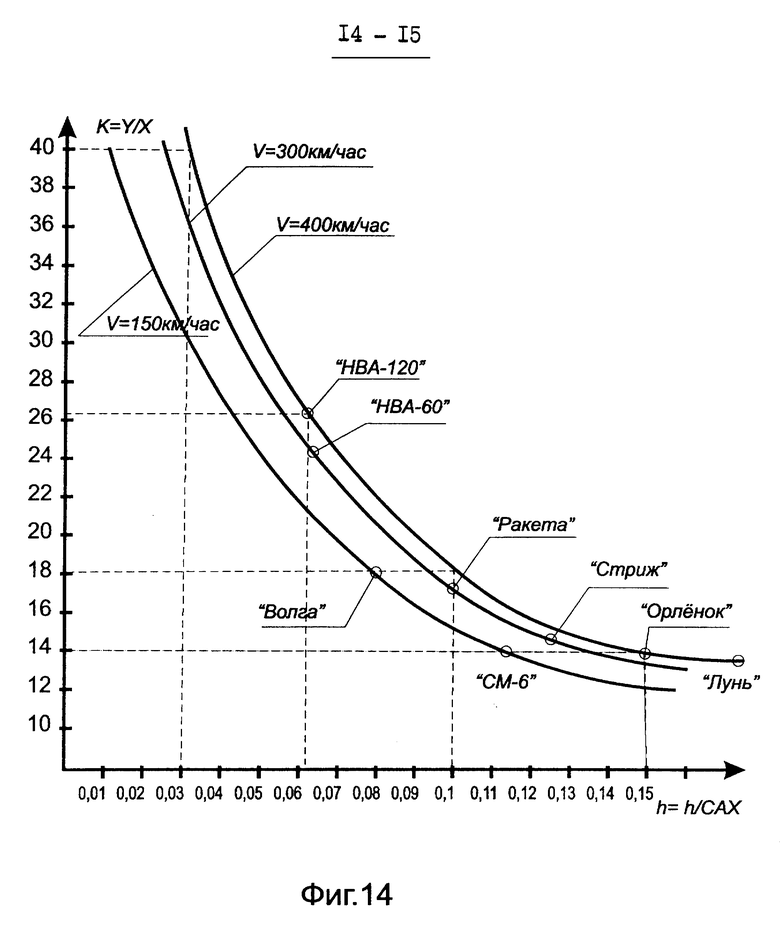
Крейсерский экранный полет в зоне влияния экрана с самолетными скоростями осуществляют без использования воздушной подушки на высоте до 3 метров с высоким аэродинамическим качеством K за счет малой относительной высоты полета и большой средней аэродинамической хорды не только крыла, но и фюзеляжа, и модульных навесных секций, имеющих положительный угол атаки нижней несущей поверхности. На графике 14 показана зависимость аэродинамического качества K экранопланов от относительной высоты полета. Для известных экранопланов эта величина будет равна: для экраноплана "Орленок" K=14, для экраноплана "Лунь" K=13,8, а для предлагаемого в настоящем изобретении НВА-60 K= 25. Экспериментальные кривые K=f (h) построены для разных скоростей полета. Для больших скоростей имеются перспективы повышения аэродинамического качества на реальных высотах полета.
Переходные режимы движения, в том числе устойчивый режим висения, бесконтактное маневрирование, разбеги и торможение осуществляют за счет использования комплекса несущих сил. Используют силу многокамерной воздушной подушки с газоструйным ограждением, создаваемую повышенным статическим давлением под крылом и фюзеляжем. Используют реактивную силу от массы воздуха от подъемных движителей-вентиляторов. Используют несущую аэродинамическую силу лопастей вентиляторов, работающих в зоне влияния экрана и в зоне повышенного давления воздушной подушки. Используют также подъемную силу верхней поверхности крыла, образованную отсосом пограничного слоя в сквозные кольцевые каналы вышеупомянутых вентиляторов и обдувом верхней поверхности крыла через щелевое сопло предкрылка-интерцептора.
Управление летательным аппаратом на малых скоростях движения (на воздушной подушке) осуществляется организованным выбросом масс рабочего тела из пространства воздушной подушки консолей крыла. Если рабочее тело выбрасывается вперед - осуществляется торможение, если назад - движение вперед, если из-под одной консоли вперед, а из-под другой назад - разворот вправо или влево. Этот выброс масс рабочего тела осуществляют ослаблением ограждения камер воздушной подушки, а также управлением щитками, элерон-закрылками и газоструйной завесой.
Переходные режимы движения осуществляют с использованием воздушной подушки на малых высотах до 2 метров.
В случае наличия больших неровностей экранирующей поверхности - волны, торосы, барханы и др. - выбор режима полета может быть осуществлен двумя способами: уходом на большую скорость, тогда аппарат сбалансируется на большей высоте от экрана, или путем принудительного ухода на большую до 1000 м высоту с помощью изменения угла тангажа или выпуска средств механизации. Самолетный полет вне зоны влияния экрана осуществляют на высотах, позволяющих преодолеть препятствия на отдельных участках трассы за счет использования резерва мощности газогенераторов, который составляет примерно 40%, после чего с помощью рулей высоты изменяют угол атаки, увеличивая его до 10o и НВА осуществляют нужный набор высоты. После этого уменьшают угол атаки до 4-5o, выполняют горизонтальный полет через препятствие. Затем снижают высоту и постепенно входят в зону влияния экрана. При этом управляют движением с использованием природной взаимосвязи трех параметров движения, а именно скорости, массы и высоты с учетом дополнительных несущих свойств от использования эффекта экрана.
Самолетный режим движения осуществляют путем использования составляющей подъемной силы, образованной увеличением несущих свойств крыла, фюзеляжа и навесных модулей, а также увеличением скорости движения. При этом газогенераторы включают на работу маршевого движителя с повышенным расходом топлива.
Увеличение полезной нагрузки аппарата осуществляют за счет использования эффекта влияния экрана, несущих фюзеляжа и навесных модулей, имеющих угол атаки α = 2-4o, при сохранении параметров движения (скорости, дальности полета, высоты, энерговооруженности и т. п.), что составит до 50% полезной отдачи и в корне меняет транспортную эффективность летательного аппарата.
Другой особенностью предлагаемого технического решения является то, что НВА-6- не проектируется для взлета и посадки только с водной поверхности, поэтому нормы проектирования заложены авиационные - для воздухоплавания, а не судовые, как делается для всех известных экранопланов. Предлагаемый аппарат может двигаться над водной поверхностью и зависать над ней на высоте 0,5-1,5 м как угодно долго для проведения аварийно-спасательных и погрузочно-разгрузочных работ с помощью выпущенных трапов и аппарелей, то есть не будет подвергаться ударам волн.
Для того чтобы обеспечить возможность вертикального отрыва от любой поверхности без преодоления сил трения, качения или гидродинамического сопротивления, пространство, на котором формируется воздушная подушка, разделено на отдельные камеры так, что газ не перетекает из камеры в камеру в поперечном направлении. В частности на НВА-60 таких камер выполнены три и каждая из них по периметру ограничена устройствами для создания газоструйной завесы. Такое конструктивное решение создает многокамерную статическую воздушную подушку. Для создания и поддержания повышенного давления в камерах воздушной подушки применены два способа ее ограждения: механический и газоструйный. Механическое ограждение осуществляется щитками и элерон-закрылками путем их выпуска по передним и задним кромкам несущих поверхностей поперек между продольными скегами. При этом угол отклонения-выпуска меняется по необходимости от 0 до 45o для элерон-закрылков и от 0 до 140o для щитков. Каждый щиток, элерон-закрылок и скег по концевым кромкам имеют многорядное расположение калиброванных сопел, через которые выдуваются отработанные газы свободных турбин несущих вентиляторов. Струи газа, выбрасываемые под оптимальным углом, образуют сплошную газоструйную завесу, которая предотвращает растекание воздуха из камер воздушной подушки и удерживает в них повышенное статическое давление, а кинетическая реактивная энергия каждой струи переходит в потенциальную энергию-давление в камере воздушной подушки и совершает работу по подъему летательного аппарата вверх. Кроме того, лопасти несущих подъемных движителей-вентиляторов большого диаметра, установленные непосредственно в зоне действия эффекта экрана, позволяют создать дополнительную подъемную силу по отношению к силе статической воздушной подушки. Таким образом, суммарная составляющая системы подъемных сил НВА-60 в режиме висения и маневрирования складывается из следующих составляющих:
статическая воздушная подушка обеспечивает до 40%;
реакция массы отбрасываемого подъемными движителями-вентиляторами воздуха дает 8%;
аэродинамическая подъемная сила всех лопастей подъемных движителей-вентиляторов составляет 35%;
отсос пограничного слоя с верхней дужки крыла воздухозаборниками вышеупомянутых вентиляторов составляет около 7%;
обдув верхней дужки крыла обеспечивает до 6%;
выпуск передних щитков на угол более 90o (увеличение площади крыла с величины S1 до S2, см. фиг. 8) обеспечивает более 4%.
Исходя из того, что общая подъемная сила аппарата НВА-60 составляет 60 тонн, определим абсолютные значения составляющих общей подъемной силы аппарата в режиме висения:
(40 + 8 + 35 + 7 + 6 + 4)% = 100%
24 т + 4,8 т + 21 т + 4,2 т + 3,6 т + 2,4 т = 60 т.
Именно такой комплекс составляющих сил позволяет обеспечить вертикальный взлет НВА-60 на значительную высоту (от 0,5 до 1,5 м) без применения традиционных гибких ограждений воздушной подушки, чем и обеспечивается преодоление различных препятствий.
Увеличение аэродинамических качеств предлагаемого аппарата по сравнению с прототипом создает возможность установки навесных модульных секций для размещения дополнительной массы полезного груза.
Выполненный в предлагаемом решении перевод летательного аппарата НВА-60 в область аэродинамического качества со значением K = 25 - это новое большое достижение в совершенствовании летательных аппаратов такого класса, поскольку лучшие показатели самолетов транспортного назначения имеют K = 19 - 22. Этим достигается существенное повышение транспортной эффективности предлагаемого летательного аппарата.
Энергетический комплекс НВА-60 сформирован на базе серийно выпускаемых газотурбинных блоков: газогенератор вырабатывает "рабочее тело" в виде высокотемпературного газа и с помощью системы термостатированных газопроводов оно распределяется в необходимых количествах потребителям, т.е. свободным турбинам тянущего маршевого винта и несущих вентиляторов, установленных в кольцевых каналах. Такой энергетический комплекс в отличие от известных традиционных аппаратов на воздушной подушке, где мощности обычно распределяют через жесткую трансмиссию по установившейся схеме: 30% на воздушную подушку и 70% на тягу движения, позволяет при необходимости использовать все 100% на тягу или на воздушную подушку. Например, в режиме подъема, висения, маневрирования в зоне экрана большая часть мощности подается на создание воздушной подушки, а в крейсерском полете вся мощность газогенераторов срабатывается на тянущих винтах (несущие вентиляторы в это время отключены).
Газодинамический способ передачи и регулирования мощности через термостатированные газопроводы, обеспечивающими кинематическую связь между газогенераторами и исполнительными механизмами, позволяет плавно ее перераспределять по мере надобности, исключает наличие жестких механических трансмиссий передачи мощности, редукторов, муфт, подшипниковых узлов и т.д. Все это упрощает конструкцию силовой установки, уменьшает ее себестоимость, повышает эксплуатационную надежность, снижает ее массу примерно на 4% от взлетной массы, что в свою очередь повышает транспортную эффективность предлагаемого по данному изобретению летательного аппарата НВА-60, а также упрощает способ управления движением летательного аппарата. Кроме того, компоновка энергетического комплекса выполнена таким образом, что наиболее уязвимые газогенераторы размещены внутри корпуса и воздухозабор выведен в "чистую" зону набегающего потока, а центростремительные силы в поворотах воздухозаборников осуществляют сепарацию частиц, плотность которых больше плотности воздуха (песок, вода, снег, лед, биомасса).
Силовая установка НВА-60 состоит из двух газотурбинных газогенераторов типа ТВ-117C эквивалентной тепловой мощностью по 2500 л.с. каждый с организованной раздачей рабочего тела через термостатированные газопроводы на две свободные турбины несущих подъемных движителей-вентиляторов с лопастями диаметром по 3 м и на свободную турбину маршевого движителя, который выполнен в виде воздушного винта диаметром 4,2 м серийного двигателя Аи-20Д мощностью 5100 л.с. Газогенераторы расположены внутри корпуса фюзеляжа в районе центра тяжести и защищены от внешних воздействий. Воздухозаборники газогенераторов объединены в общий воздухоприемный канал и вынесены в лобовую часть фюзеляжа в зону возможного срыва пограничного слоя потока воздуха. Они имеют активную защиту от засорения извне, например в виде сепараторов. Воздухозаборники расположены по всему размаху верхней дужки фюзеляжа, а воздухопроводный канал имеет в сечении прямоугольную форму.
На фиг. 7, 8 и 9 показаны сечения, раскрывающие компоновочные решения силовой установки, а на фиг. 10 и 11 показаны решения удержания статической воздушной подушки с помощью выпущенных щитков и элерон-закрылков с одновременным выдувом газоструйной завесы. Каждый из вентиляторов расположен на границе консолей крыла и фюзеляжа и поэтому наддувает одновременно две камеры воздушной подушки: камеру консоли крыла и камеру подфюзеляжного пространства. В итоге статическая воздушная подушка организована по трехкамерной схеме: две камеры I и III расположены под консолями крыльев и одна II удлиненной формы - под фюзеляжем, то есть использован принцип трехопорного шасси самолета (см. фиг. 11). Такая воздушная подушка обеспечивает статическую устойчивость аппарата в режимах висения и маневрирования, когда подъемные силы крыла и фюзеляжа не работают из-за малых скоростей движения.
Низко расположенные подъемные движители-вентиляторы работают в зоне эффекта экрана: хорда лопасти вентилятора примерно равна высоте расположения вентилятора над поверхностью. Кроме того, лопасти указанного вентилятора работают в зонах повышенного давления в камерах воздушной подушки.
Саблевидные лопасти подъемных движителей-вентиляторов выполнены с переменным сечением, с увеличенной хордой лопасти, что позволяет им создавать дополнительную подъемную силу, по эффективности сравнимую с лопастями вертолетных винтов. Их расположение в кольце в зоне повышенного давления воздушной подушки (ρ > 0,125) увеличивает подъемную силу еще на 8%, а кроме того, лопасти работают в зоне влияния экрана (h = 0,2), что увеличивает их несущие свойства еще на 50 - 80% по сравнению с винтами горизонтальной тяги.
НВА-60 не имеет традиционного амортизирующего шасси, которое воспринимает всю массу известного самолета, приземляющегося на значительной вертикальной скорости, в то время как предлагаемый аппарат совершает мягкую посадку на воздушной подушке, практически не имея вертикальной скорости.
Предлагаемый летательный аппарат снабжен системами, обеспечивающими его эксплуатацию: управления, топливную, масляную, гидравлическую, противопожарную, противооблединительную, отопления, вентиляции и другие, в том числе радиосвязи и радионавигации, что позволяет ему выполнять полеты, в том числе и в сложных метеорологических условиях.
НВА-60 оборудован выпускными бортовыми трапами и аппарелью, что обеспечивает его быструю погрузку-разгрузку без применения аэродромных средств.
Предлагаемое устройство НВА-60 работает следующим образом.
После завершения посадки пассажиров и приема грузов убираются выпускные трапы и аппарель. Заслонка распределения рабочего тела устанавливается в положение "Вентиляторы". Производится запуск генераторов - устанавливается режим "Малый газ". По графику прогрева проверяется работа газогенераторов. Затем выпускаются элерон-закрылки и щитки, включается струйная завеса и ручка управления двигателями переводится в режим "Взлет". Аппарат отрывается от поверхности и зависает на максимальной высоте статической воздушной подушки (1,0 - 1,5 м). Проверяется балансировка аппарата в режиме "Висение". Затем заслонка газораспределителя устанавливается в положение 70% "Вентиляторы" и 30% "Маршевый движитель". С началом работы маршевого движителя обдуваются рули высоты и направления. С помощью руля направления аппарат разворачивается на нужный курс, с помощью рулей высоты устанавливается тангаж - необходимый угол атаки. Начинается продольное движение - рулежка. Вырулив на прямой участок разбега, увеличивают угол атаки лопастей винта маршевого движителя для разбега аппарата. При достижении скорости 110 км/час заслонку распределения рабочего тела плавно (по мере набора скорости) переводят в положение 100% "Маршевый движитель" (при 0% "Вентиляторы"). Это осуществляют при скорости аппарата 230 - 250 км/час. В это время убирают струйную завесу, элерон-закрылки и щитки - продолжается энергичный разбег. После достижения нужных параметров движения (естественно сбалансированных по скорости, высоте, крену и тангажу) плавно снижают режим работы газогенераторов до 0,5 - 0,8 режима "Номинал". В это время аппарат осуществляет полет в крейсерском режиме и управляется элерон-закрылками, рулями направления и высоты. При подходе к пункту назначения заслонку распределения рабочего тела плавно переводят в положение 50% "Вентиляторы" и 50% "Движитель". Аппарат начинает терять скорость (падают обороты винта маршевого движителя). Одновременно уменьшают угол атаки лопастей винта движителя. При скорости движения 200 км/час выпускают элерон-закрылки, включают струйную завесу - аппарат тормозится до скорости 100 км/час. В это время заслонку переводят в положение 70% "Вентиляторы" и 30% "Движитель", а режим работы газогенераторов переводят на "Номинал". Скорость НВА падает до 20 - 40 км/час. На этой скорости (регулируя угол установки лопастей винта) выполняют рулежку до точки посадки, где заслонку распределения рабочего тела переводят в положение "Вентиляторы". Маршевый движитель останавливается, и НВА находится в режиме висения. Плавно снижают режим работы газогенераторов до 0,2 "номинала" и осуществляют посадку. Затем убирают щитки, элерон-закрылки и газоструйную завесу. От работающих газогенераторов запускают бортовой стояночный турбогенератор и выпускают бортовые трапы и аппарель. В это время останавливаются газогенераторы и подъемные движители вентиляторы. Аппарат готов к высадке пассажиров и разгрузке. При промежуточных остановках газогенераторы не останавливаются, а переводятся на режим "Малый газ", а заслонка переводится в положение "Движитель", при этом винт слабо вращается, не создавая тяги.
Использование предложенных способов и устройства для их реализации позволяет достичь цели изобретения - комплексного улучшения аэродинамических и транспортных характеристик летательного аппарата самолетного типа, а также нового, не известного ранее в самолетовождении, способа управления полетом летательного аппарата. Кроме того, конструкция НВА-60 представляет собой новое высокоэффективное транспортное средство, способное принципиально изменить и улучшить всю существующую транспортную систему.
Предлагаемый летательный аппарат позволяет более чем в 4 раза повысить производительность грузопотоков и значительно экономить топливо при снижении экологической нагрузки на природу. Повышается безопасность транспортировки пассажиров и грузов, поскольку аппарат летит на очень низкой высоте и исключает вероятность удара о поверхность при приземлении. Техническим результатом является создание летательного аппарата самолетной схемы с экранопланными свойствами наземно-воздушной амфибии, в котором управление движением осуществляют с учетом взаимосвязи трех параметров движения, а именно скорости, массы и высоты при использовании эффекта экрана. Летательный аппарат НВА-60 разработан как многоцелевой в дополнение к существующим транспортным средствам. Он относится к самостоятельному виду транспорта, способного конкурировать по основным летным и экономическим показателям с известными самолетами такого же класса (Як-42М и Боинг-737-30).
В таблице приведены сравнительные отдельные характеристики предлагаемого аппарата и прототипа.
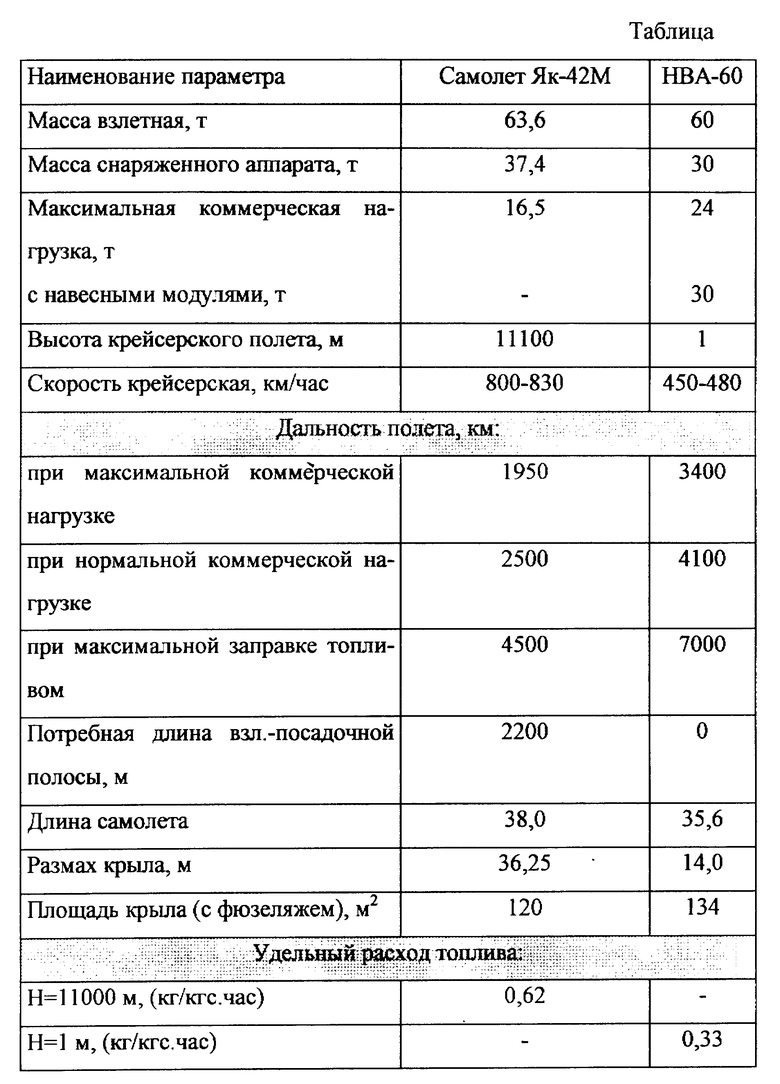



Группа изобретений относится к транспорту и касается конструирования наземно-воздушных амфибий, использующих эффект водного и твердого экрана и способных осуществлять полет вне зоны его действия. Сущность группы изобретений состоит в следующем. При создании системы полетных сил обеспечивают газодинамическую передачу энергии от газогенераторов к подъемным движителям-вентиляторам, маршевому движителю и устройству для газоструйной завесы воздушной статической подушки. По концевым частям крыла располагают дополнительные грузопассажирские модули, которые вместе с фюзеляжем компонуют в виде аэродинамических профилей. Под наземно-воздушной амфибией (ИВА) формируют статическую воздушную подушку подъемными движителями-вентиляторами вблизи днища аппарата, реактивную струю создают направленной в сторону экрана, и осуществляют отсос пограничного слоя с верхней дужки крыла. Распределяют действие создаваемой системы сил рационально по конструкции аппарата, чем добиваются изменения структуры напряжений в элементах конструкции аппарата. НВА самолетной схемы содержит фюзеляж с пассажирскими салонами и/или грузовыми отсеками, несущее крыло с шайбами. Газогенераторы для формирования тяги и воздушной подушки соединены с исполнительными механизмами маршевого движителя и упомянутых несущих вентиляторов. Технический результат реализации группы изобретений - улучшение аэродинамических, конструктивных, транспортных и эксплуатационных характеристик аппарата как вблизи экрана, так и вне его. 2 с. и 11 з.п. ф-лы, 15 ил., 1 табл.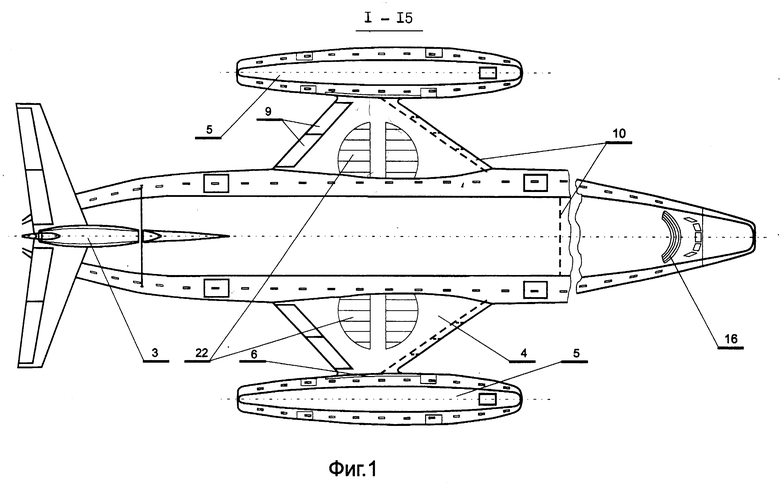
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авиация | |||
| Энциклопедия | |||
| Гл.ред | |||
| Свищев Г.П | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

