ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к сетям связи и, более конкретно, к эффективному управлению ресурсами каналов в цифровой сети подвижной связи.
УРОВЕНЬ ТЕХНИКИ
Общее название соединения между отдельной подвижной станцией, перемещающейся в области отдельного сота и базовой приемопередающей станцией (БПС), обеспечивающей обслуживание радиосвязи для этой конкретной области сота, есть "интерфейс радиосвязи" или "воздушный интерфейс". Исторически передача информации по интерфейсу радиосвязи между базовой приемопередающей станцией (БПС) и подвижной станцией выполнялась с помощью так называемой техники аналоговой модуляции. Например, технология Множественного Доступа с Разделением по Частоте (МДРЧ) широко использовалась, чтобы назначить каждую подвижную станцию одному из множества частотных каналов, связанных с областью текущего сота для связи с обслуживающей БПС. Однако позднее стала использоваться техника цифровой модуляции, чтобы усовершенствовать эффективность использования частотного спектра, выделяемого для подвижной связи. В качестве иллюстрации используются две технологии - множественного доступа с разделением по времени (МДРВ) и множественного доступа с кодовым разделением (МДКР), чтобы позволить проведение связи между БПС и множеством разных подвижных станций на сравнительно ограниченном количестве радиочастотных полос. Например, система связи Глобальная Система Подвижной Связи (ГСПС) использует концепцию МДРВ с распределением одного кадра МДРВ на каждый частотный канал несущей, чтобы осуществлять связь между подвижной станцией и БПС. Каждый кадр затем разделяется на восемь временных интервалов (ВИ). Каждый временной интервал кадра МДРВ на одном частотном канале называется физическим каналом. Соответственно, в системе ГСПС имеется восемь физических каналов на одну несущую. Каждый физический канал системы ГСПС можно сравнить с одним отдельным каналом в системе МДРИ, где каждый пользователь присоединен к системе через одну из связанных частот.
Применение технологии МДРВ требует, чтобы большое количество разнообразной информации передавалось между обслуживающей БПС и подвижной станцией по ограниченным физическим каналам. Например, по физическим каналам должны передаваться управляющие данные, данные запроса обслуживания, данные действительного трафика, дополнительные данные и т.п. В результате, чтобы различить один тип данных от другого, доступным физическим каналам даны названия и выделены различные логические каналы. Например, действительная речь посылается по логическому каналу, названному "канал трафика" (КТ), занимающему один или более физических каналов. Поисковый вызов подвижной станции вызываемой стороны выполняется по логическому "каналу поискового вызова (КП)", в то время как синхронизация подвижной станции с обслуживающей БПС осуществляется по логическому "каналу синхронизации (КС)", который занимает один из физических каналов. Соответственно, в зависимости от типа передаваемых данных используются разные логические каналы. Нет необходимости говорить, что если больше физических каналов назначено отдельным логическим каналам, то меньшее количество физических каналов доступно для остальных логических каналов.
Ввиду ограниченности ресурса физических каналов провайдеры мобильных служб часто сталкиваются с проблемами управления ресурсом каналов и установления его размера. Одна такая проблема включает эффективное управление Автономными Выделенными Управляющими Каналами (АВУК) в обслуживающей подвижной сети. Ввиду того, что перегрузка в логических каналах АВУК приводит к потере вызовов и отказам в установке разговоров, эффективное управление логическими каналами АВУК является критичным для обеспечения надежных подвижных служб к подвижным станциям, движущимся в пределах обслуживаемой зоны покрытия.
Логические каналы АВУК используются не только для установления соединений вызова, но также для выполнения корректировок местоположения для движущихся подвижных станций и для передачи пакетных сообщений, содержащих текстовые или графические данные, между обслуживающей подвижной сетью и связанными подвижными станциями. Обычно для всех этих вышеупомянутых функций установлен один и тот же приоритет и разрешен равный доступ к доступным ресурсам каналов АВУК. В результате, все доступные ресурсы каналов АВУК могут быть заняты сообщениями Службы Коротких Сообщений (СКС) или Неструктурированных Данных Дополнительных Служб (НДДС), передающими текстовые сообщения, и могут, в результате, предотвратить установление речевых соединений между мобильными станциями и обслуживающей сетью подвижной связи. Однако, хотя поддержка всех этих вышеупомянутых функций важна для обеспечения надежного и всестороннего обслуживания подвижной связи для связанных подвижных станций, установление соединений для разговора является самой важной функцией, выполняемой сетью подвижной связи.
Соответственно, есть необходимость в механизме установления приоритета служб подвижной связи в обслуживающей подвижной сети подвижной связи, чтобы лучше использовать доступные логические каналы АВУК.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение раскрывает способ и устройства для оптимизации использования Автономных Выделенных Управляющих Каналов (АВУК) в сети подвижной связи для высокоприоритетных служб подвижной связи. Уровень использования логических каналов АВУК поддерживается в отдельном контроллере базовой станции (КБС), обслуживающем конкретную географическую область. После определения того, что этот уровень превысил предельное значение, установленное обслуживающей сетью связи, КБС передает данные по Каналу Управления Радиопередачей, информируя связанные подвижные станции, движущиеся в ее зоне обслуживания, о таком определении. После этого подвижные станции, желающие запросить обслуживание подвижной связи низкого приоритета, получают указание задержать запрос одного из доступных логических каналов АВУК до тех пор, пока уровень использования не снизится ниже установленного предельного уровня. В результате, доступные логические каналы АВУК остаются доступными для высокоприоритетных служб подвижной связи в перегруженной сети подвижной связи.
В настоящем изобретении раскрыта подвижная станция для оптимизации использования множества первых управляющих каналов для служб подвижной связи высокого приоритета в сети подвижной связи, причем упомянутая сеть подвижной связи содержит узел связи, обеспечивающий службы подвижной связи к подвижной станции, отличающаяся тем, что содержит средство для приема индикации по второму управляющему каналу, показывающей доступность множества первых управляющих каналов в упомянутой сети подвижной связи, средство для удостоверения, что упомянутая подвижная станция нуждается в посылке запроса на службу подвижной связи по направлению к узлу связи, средство для определения того, что запрашиваемая служба подвижной связи имеет более низкий приоритет по сравнению с доступностью упомянутого множества первых управляющих каналов, и средство для задержки запроса на упомянутую службу подвижной связи в направлении упомянутого узла связи в ответ на выполненное определение.
Примером первого управляющего канала является автономный выделенный канал АВУК (SDCCH), а примером второго управляющего канала является канал управления радиопередачей КУР (ВССН).
Раскрыта также система для передачи данных, показывающих состояние ресурсов канала, множеству подвижных станций в сети подвижной связи, отличающаяся тем, что содержит модуль применений в узле связи для поддержания множества первых управляющих каналов и для определения того, что использование множества первых управляющих каналов некоторыми из множества подвижных станций превысило предельный уровень, связанный с упомянутым узлом связи, и передатчик, присоединенный к узлу связи, для передачи, в ответ на выполненное определение, данных, информирующих о результате такого определения, к упомянутому множеству подвижных станций по второму управляющему каналу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Более полное раскрытие способа и устройства, заявленных в соответствии с настоящим изобретением, может быть получено из нижеследующего подробного описания, приводимого со ссылкой на сопровождающие чертежи, на которых:
Фиг. 1 - схема сети подвижной связи, иллюстрирующая подвижную станцию, связанную с обслуживающей базовой приемопередающей станцией (БПС);
Фиг. 2 - схема физических каналов, распределенных в соответствии с технологией Множественного Доступа с Разделением по Времени (МДРВ);
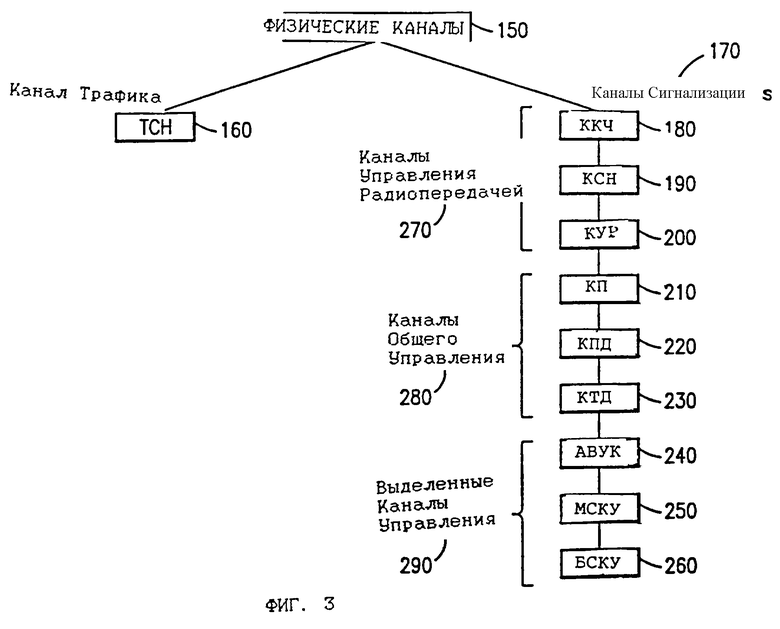
Фиг. 3 - схема различных логических каналов в физическом блоке МДРВ в соответствии со стандартом Глобальной Системы Подвижной Связи (ГСПС);
Фиг. 4 - диаграмма последовательности сигналов, иллюстрирующая передачу различных сообщений для осуществления соединения исходящего вызова;
Фиг. 5 - схема обслуживающей сети подвижной связи, передающей информацию состояния Автономного Выделенного Управляющего Канала (АВУК) к подвижной станции в соответствии с сущностью настоящего изобретения; и
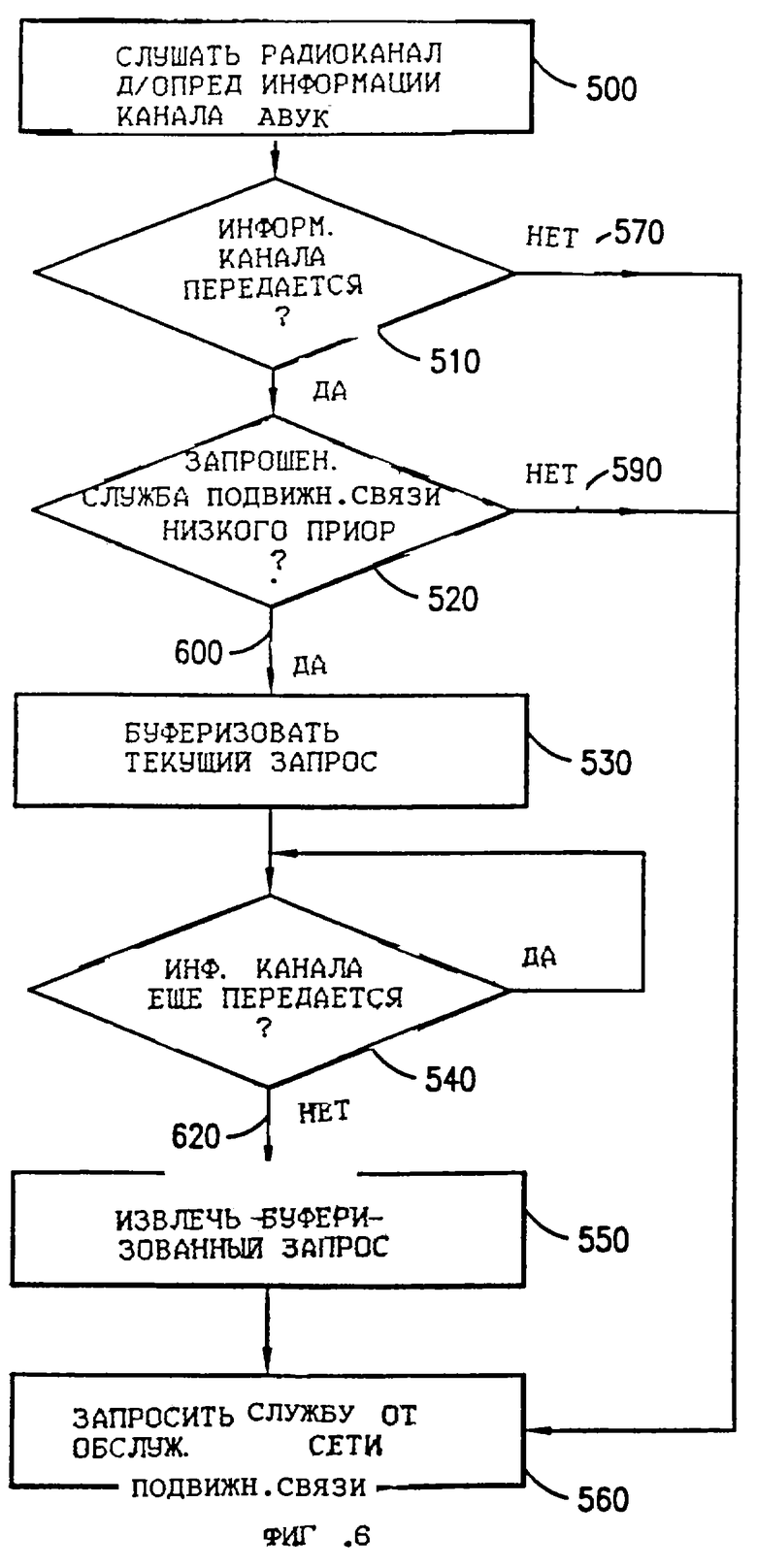
Фиг. 6 - блок-схема, иллюстрирующая этапы, выполняемые подвижной станцией, чтобы запросить обслуживание подвижной связи от обслуживающей сети подвижной сети подвижной связи.
На фиг. 1 представлена блок-схема (Сети 10 Связи Общего Пользования) Наземных Подвижных Объектов (ССНПО), иллюстрирующая подвижную станцию 20, осуществляющую связь с обслуживающей базовой приемопередающей станцией 30 (БПС). Географическая область, связанная с конкретной ССНПО 10, разделена на множество более мелких областей. Как только подвижная станция 20 входит в одну из этих более мелких областей, известных как "область местоположения", подвижная станция выполняет корректировку местоположения с обслуживающей ССНПО. Такая корректировка местоположения информирует связанный центр коммутации подвижных служб / гостевой регистр (ЦКПС/ГР) 50 о присутствии подвижной станции. В случае, если подвижная станция 20 является незарегистрированным абонентом, домашний регистр (ДР) 60, связанный с вновь регистрируемой подвижной станцией 20, идентифицируется и устанавливается необходимая связь между обслуживающим ЦКПС/ГР 50 и ДР 60, чтобы идентифицировать новую подвижную станцию 20. Информация о реквизитах абонента, относящаяся к вновь зарегистрированной подвижной станции 20, затем запрашивается и извлекается из связанного ДР 60 и записывается в обслуживающем ЦКПС/ГР 50. После этого подвижная станция 20 может получить доступ к обслуживанию подвижной связи в зоне обслуживания обслуживающего ЦКПС/ГР 50.
Как только соединение входящего вызова запрашивается к подвижной станции 20, в межсетевом коммутационном центре подвижной связи (МКЦПС) 80, связанном с ДР 60, принимается сигнал установления вызова, такой как Начальное Адресное Сообщение (НАС) на основании Части Пользователя Цифровой Сети с Интеграцией Услуг (ЧПЦСИУ). После выполнения запроса ДР, чтобы определить текущее местоположение подвижной станции 20, принятый сигнал установления входящего вызова перенаправляется МКЦПС 80 к ЦКПС/ГР 50, осуществляющему текущее обслуживание подвижной станции 20. ЦКПЧ/ГР 50 затем определяет текущую область расположения подвижной станции 20 и дает указание соответствующему контроллеру базовой станции (КБС) 40 выполнить поисковый вызов подвижной станции 20. Затем БПС 30 вызывает подвижную станцию, чтобы известить ее о входящем вызове. Как только подвижная станция детектирует сообщение о вызове, подвижная станция 20 посылает запрос на канал сигнализации к КБС 40. После назначения свободного канала сигнализации подвижной станции 20 КБС 40 посылает сообщение, указывающее подвижной станции 20 переключиться на этот конкретный канал сигнализации. После передачи необходимых управляющих и служебных данных, относящихся к соединению, по вновь распределенному каналу сигнализации происходит захват речевого канала и устанавливается соединение разговора между подвижной станцией 20 и КБС 40 через БПС 30.
Первоначально интерфейс связи 90 между обслуживающей БПС 30 и подвижной станцией 20 использовал так называемую аналоговую технику модуляции. Однако с современным развитием цифровой технологии связи используется цифровая техника модуляции для усовершенствования эффективности и пропускной способности передачи данных в сети подвижной связи. В качестве иллюстрации техника множественного доступа с разделением по времени (МДРВ) или множественного доступа с кодовым разделением (МДКР) используется, чтобы позволить осуществление множественной связи на сравнительно ограниченном количестве радиочастот. Сети связи на основании Глобальной Системы Подвижной связи (ГСПС), например, используют технологию МДРВ с одним кадром МДРВ на каждую несущую частоту, чтобы осуществлять связь между подвижной станцией и БПС.
На фиг.2 схематически представлены блочно-временные структуры в стандарте ГСПС. Самый большой повторяющийся период времени структуры называется гиперкадр 100 и имеет длительность 3 ч 28 мин 53 с 760 мс. Один гиперкадр 100 делится на 2048 суперкадров 105, каждый из которых имеет длительность 6,12 с. Суперкадр в свою очередь делится на множество мультикадров. В стандарте ГСПС существует два типа мультикадров. Первым является 51-кадровый мультифрейм 110 с длительностью 120 мс, содержащий 26 кадров МДРВ 130. Следующим является 26-кадровый мультикадр 120 с длительностью 235,4 мс, содержащий 51 кадр МДРВ 140. Наконец, каждый кадр МДРВ в мультикадре имеет восемь временных интервалов 150. Каждый из этих восьми физических временных интервалов эквивалентен одному каналу Множественного Доступа с Разделением по частоте, обслуживающему одну подвижную станцию.
Большое количество разнообразной информации должно быть передано между БПС и подвижной станцией. Например, поисковый вызов, чтобы информировать подвижную станцию о входящем вызове, должен быть выполнен в одном из временных интервалов. Запрос службы подвижной связи дополнительно требует передачи в одном из временных интервалов. Более того, действительные речевые данные должны быть переданы по доступным временным интервалам. Поэтому, чтобы отличить один тип данных от другого, введены различные логические каналы и распределены каждому из восьми физических временных интервалов.
На фиг.3 представлены различные логические каналы в стандарте ГСПС, которые могут быть разделены на две больших категории: каналы 160 трафика (КТ) и каналы 170 сигнализации. Каналы 160 трафика (КТ) используются обслуживающим КБС для соединения данных разговора (например, речевых данных) с отдельной подвижной станцией, перемещающейся в его зоне обслуживания. С другой стороны, каналы 170 сигнализации используются обслуживающими КБС и БПС, чтобы передавать другие управляющие данные, необходимые для осуществления соединения данных разговора с подвижной станцией.
Каналы сигнализации дополнительно подразделяются на три категории: каналы 270 управления радиопередачей, каналы 280 общего управления и каналы 290 специального управления. Каждая из этих вышеуказанных категорий затем еще дополнительно подразделяется на несколько логических каналов для передачи различного типа информации между обслуживающей БПС и подвижной станцией.
Каналы 270 управления радиопередачей используются главным образом для передачи информации от обслуживающей БПС к отдельной мобильной станции, передвигающейся в ее зоне обслуживания (линия связи), и содержат Канал 180 Коррекции Частоты (ККЧ), Канал 190 Синхронизации (КСН) и Канал 200 Управления Радиопередачей (КУР). Канал 180 Коррекции Частоты (ККЧ) содержит информацию для коррекции частоты подвижной станции. Канал синхронизации (КСН) содержит информацию для синхронизации кадра подвижной станции и идентификации БПС. Наконец, Канал 200 Управления Радиопередачей (КУР) используется, чтобы передавать общую информацию системы о соте ко всем подвижным станциям, расположенным в его зоне обслуживания. Например, информация системы радиопередачи содержит данные о сети, которая необходима подвижной станции, чтобы она могла осуществлять связь с сетью соответствующим образом. Такая информация содержит описание сота, идентификацию области местоположения, описание соседнего сота и т.п.
Каналы 280 общего управления содержат Канал 210 Поискового Вызова (КП), Канал 220 Произвольного Доступа (КПД) и Канал 230 Гарантированного Доступа (КГД). Канал 210 Поискового Вызова (КП) используется на линии связи, чтобы осуществлять поисковый вызов мобильной станции. Например, когда запрос на установление входящего вызова принимается обслуживающим ЦКПС/ГР, соответствующий КБС, осуществляющий текущее обслуживание подвижной станции, получает указание осуществить поисковый вызов указанной подвижной станции по каналу КП. Канал 220 Произвольного Доступа (КПД), с другой стороны, используется подвижной станцией, чтобы запросить назначение Автономного Выделенного Управляющего Канала (АВУК) 240 к КБС. Например, после детектирования сообщения о поисковом вызове, информирующего подвижную станцию о входящем вызове, вызываемая подвижная станция запрашивает у обслуживающего КБС канал АВУК через канал КПД. После назначения свободного канала АВУК контроллер КБС использует Канал 230 Гарантированного Доступа (КГД), чтобы передать идентификацию назначенного АВУК к запрашивающей подвижной станции.
Выделенные управляющие каналы 290 содержат Автономный Выделенный Управляющий Канал (АВУК) 240, Медленный Совмещенный Канал 250 Управления (МСКУ) и Быстрый Совмещенный Канал 260 Управления (БСКУ). Автономный Выделенный Управляющий Канал (АВУК) 240 используется для сигнализации от выделенной подвижной станцией. Соответственно, АВУК является каналом, используемым для выполнения процедур корректировки местоположения, когда подвижная станция входит в новую область местоположения. Канал АВУК используется также, чтобы инициировать установление вызова и захватить КТ. Более того, логические каналы АВУК используются обслуживающими сетями подвижной связи, чтобы передавать Неструктурированные данные, такие как сообщения Службы Коротких Сообщений (СКС) или Неструктурированных Данных Дополнительных Служб (НДДС), к связанным подвижным станциям. МСКУ 250 связан с КТ 160 или с АВУК 240. МСКУ 250 является каналом постоянных данных, несущим постоянную контрольную информацию, такую как отчеты о измерениях, состояние синхронизации и питания, между обслуживающим КБС и подвижной станцией. Наконец, БСКУ 260 связан с конкретным КТ, чтобы работать в режиме пакетной замены, чтобы заменять речь или данные трафика другими необходимыми сигналами.
Как было показано выше, при наличии девяти разных типов логических каналов сигнализации и одного логического канала трафика, занимающих ограниченное число физических каналов, восемь временных интервалов в кадре МДРВ нуждаются в действенном и эффективном управлении, чтобы обеспечить надежные службы подвижной связи для подвижных станций, движущихся в зоне обслуживания конкретного КБС. Поскольку назначение логических каналов физическим каналам не может быть изменено динамически в виде требований для изменений каждого логического канала в обслуживающей сети, определение соответствующего количества физических временных интервалов, которые должны быть назначены каждому из логических каналов, являются решающим. Особенно поскольку перегрузка в двух из наиболее часто используемых логических каналов (АВУК и КТ) приводит к сбою соединений вызова и потере разговоров. Поэтому, даже после назначения соответствующего количества физических каналов каждому из логических каналов, эффективное управление ресурсами каналов необходимо и далее, чтобы максимизировать потенциал использования доступных логических каналов.
На фиг. 4 представлена диаграмма последовательности сигналов, иллюстрирующая процедуру нормальной установки разговора в соответствии со стандартом ГСПС. Как только подвижная станция 20 запрашивает подвижную услугу в направлении центра 50 коммутации подвижных служб (ЦКПС) либо для возбуждения исходящего соединения вызова, либо для приема входящего соединения вызова, подвижная станция 20 передает сообщение запроса канала по каналу произвольного доступа (КПД) к присоединенному КБС 40. После установления связи со связанным ЦКПС 50 назначается доступный канал АВУК. Затем обслуживающий КБС 40 передает сообщение Команды 310 Немедленного Назначения к обслуживающей БПС 30 (на фиг. 4 не показано), чтобы назначить распределенный канал АВУК запрашивающей подвижной станции 20. Сообщение 310 Немедленного Назначения затем передается к запрашивающей подвижной станции 20, чтобы дать указание подвижной станции 20 переключиться на назначенный канал АВУК. Используя назначенный логический канал АВУК, подвижная станция 20 запрашивает обслуживание подвижной связи от обслуживающего ЦКПС 50 путем передачи сообщения Запроса Службы Режима Кодирования (ЗСРК) 320. Затем обслуживающий КБС 40 устанавливает соединение Пункта Управления Соединением Сигнализации (ПУСС) с ЦКПС 50 путем передачи сообщения Запроса Соединения (ЗС) ПУСС 330. Принятое сообщение ЗСРК 320 может быть затем "прикреплено к спине" передаваемого сообщения ПУСС-ЗС 330. Затем обслуживающий ЦКПС 50 осведомляется о запросе подвижной станцией службы подвижной связи услуги. В результате ЦКПС 50 пытается идентифицировать мобильную станцию 20 путем передачи сообщения 350 Запроса Идентификации к подвижной станции 20 через присоединенный ЦКПС 40 по назначенному логическому каналу АВУК. Подвижная станция 20 в ответ пытается подчиниться процессу идентификации путем возврата сообщения 360 Ответа Идентификации к обслуживающему ЦКПС 50. Если процедура идентификации выполнена успешно, обслуживающий ЦКПС 50 может инициировать процедуру установки режима кодирования. Соответственно, обслуживающий ЦКПС 50 посылает Команду Режима Кодирования (не показана на фиг.4) к КБС 40. КБС 40, в свою очередь, передает сообщение 370 Команды Режима Кодирования, содержащее ключ кодирования, к подвижной станции 20 по назначенному логическому каналу АВУК. Переданный ключ кодирования затем позднее используется обслуживающей БПС и подвижной станцией для шифрования и дешифрования цифровых данных, передаваемых по интерфейсу радиосвязи. После записи принятого ключа кодирования подвижная станция 20 возвращает сообщение 380 Завершения Режима Кодирования к обслуживающему КБС 40 по назначенному логическому каналу АВУК. Принятое сообщение 390 Завершения Режима Кодирования 390 затем передается к обслуживающему КБС 50. Кроме того, чтобы гарантировать конфиденциальность мобильного абонента, вместо идентификации подвижной станции с помощью ее постоянно определенного номера Международной Идентификации подвижного Абонента (МИНПА) обслуживающим КБС 50 дополнительно присваивается номер Временной Идентификации подвижного Абонента (ВИНПИ). Присвоенный номер ВИНПИ затем включается в состав сообщения 400, Команды Переназначения ВИНПИ и передается к подвижной станции 20 по назначенному логическому каналу АВУК. Подвижная станция 20 затем подтверждает получение назначенного номера ВИНПИ путем передачи сообщения 410 Завершения Переназначения ВИНПИ по назначенному логическому каналу АВУК обратно к обслуживающему ЦКПС 50. Подвижная станция 20 теперь подготовлена к осуществлению исходящего соединения вызова и передает сообщение 420 Установления Вызова к обслуживающему ЦКПС 50. Передаваемое сообщение 420 Установления, например, содержит номер директории, связанной с предполагаемым вызываемым абонентом. Обслуживающий ЦКПС 50 затем подтверждает сигнал установления вызова путем передачи сообщения 430 Подтверждения Вызова обратно к запрашивающей подвижной станции 20 по назначенному логическому каналу АВУК. Затем КБС 40 выбирает свободный канал трафика (КТ) и дает указание подвижной станции 20 подключиться к вновь назначенному логическому каналу КТ путем передачи сообщения 440 Команды Назначения по логическому каналу АВУК. В качестве подтверждения подвижная станция 20 возвращает обслуживающему ЦКПС 50 сообщение 450 Завершения Назначения, показывающее, что канал трафика включен и действует. Затем КБС разъединяет ненужный более логический канал АВУК. Затем от обслуживающего КБС 40 к подвижной станции 20 передается сообщение 460 Готовности, информирующее подвижную станцию, что вызывной тональный сигнал был генерирован обслуживающим КБС 50. После этого от мобильной станции 20 к обслуживающему КБС 50 передается сигнал 470 Соединения. Затем обслуживающий КБС 50 подтверждает сигнал соединения путем возвращения запрашивающей подвижной станции 20 сообщения 480 Подтверждения Соединения. После этого установлено речевое соединение по вновь назначенному логическому каналу КТ, позволяющее подвижной станции 20 обмениваться данными (например, речевыми) со своим вызываемым абонентом.
Должно быть понятно, что процедура возбуждения разговора, проиллюстрированная выше, предназначена только для иллюстративных целей, и что процедуры прекращения разговора для установления входящего вызова также применимы в том смысле, что канал АВУК также необходим и он интенсивно используется в направлении его вызываемой подвижной станции до того, как разговор может быть прекращен.
Как показано выше, до того как логический канал КТ будет занят, позволяя подвижному абоненту осуществлять связь с другим оконечным устройством связи, требуется обмен большим количеством разнообразной информации между обслуживающей подвижной станцией и запрашивающей мобильной станцией по логическому каналу АВУК. Эта информация содержит данные идентификации, данные назначения канала, данные запроса службы, данные номера ВИНПА и данные информации установления разговора. Соответственно, без наличия доступного канала АВУК, даже при доступном канале КТ, подвижная станция не может получить доступ к службе подвижной связи, луге. Такая служба подвижной связи содержит не только запросы на установление разговоров, как объяснялось выше, но и множество других функций. Каждый раз, когда подвижная станция входит в новую область местоположения, обслуживаемую новым КБС, движущаяся подвижная станция нуждается в выполнении корректировки местоположения со связанным с ней домашним регистром (ДР) по логическому каналу АВУК. Затем подвижная станция должна периодически информировать обслуживающие КБС и ЦКПС, что эта подвижная станция еще находится в пределах области обслуживания путем выполнения процедур Присоединения Международной Идентификации подвижного Абонента (МИНПО) по логическим каналам АВУК. Прекращение соединений разговора способом, подобным вышеописанному, также требует логических каналов АВУК, чтобы информировать подвижные станции и установить соединения прекращения разговора. Более того, неструктурированные данные, такие как сообщения Службы Коротких Сообщений (СКС) и Неструктурированных Данных Дополнительных Служб (НДДС) также соединяются по логическим каналам АВУК. При всех этих вышеописанных службах подвижной связи, пытающихся занять и использовать ограниченное количество логических каналов АВУК в конкретной сети подвижной связи, обеспечение рационального и эффективного управления ресурсами логических каналов АВУК становится решающим для обеспечения надежных и рациональных подвижных служб к связанным подвижным станциям.
На фиг. 5 представлена обслуживающая сеть подвижной связи, передающая информацию о состоянии Автономного Выделенного Управляющего Канала (АВУК) к подвижной станции в соответствии с сущностью настоящего изобретения. Узел связи, связанный с конкретной географической областью, такой как область сота, поддерживает статистические данные, представляющие уровень использования логических каналов АВУК, связанных с этой конкретной областью. Такой узел связи может содержать контроллер 60 базовых станций (КБС), обслуживающий эту конкретную географическую область. Он может, кроме того, содержать базовую приемопередающую станцию (БПС), обслуживающую эту конкретную область сота. Каждый раз, когда канал АВУК запрашивается и назначается одной из связанных базовых приемо-передающих станций (БПС) 30 для конкретной подвижной станции, статистические данные, связанные с этой конкретной сотовой областью, корректируются модулем 500 применений, связанным с КБС 60. Подобным образом каждый раз, когда назначенный логический канал АВУК освобождается подвижной станцией, статистические данные корректируются, чтобы отражать доступность освобожденного канала в пределах географической области.
В случае, если поддерживаемые статистические данные, отражающие уровень использования АВУК, превосходят предельный уровень, назначенный связанной сетью подвижной связи, выдается идентификация того, что уровень использования АВУК в пределах обслуживаемой географической области достиг нежелательного уровня и что имеется неадекватное количество доступных логических каналов АВУК для адекватной обработки потенциальных высокоуровневых запросов служб подвижной связи от связанных с ней подвижных станций. В результате модуль 500 применений передает радиосообщение ко всем подвижным станциям, расположенным в его области покрытия, по одному из его радиотрансляционных каналов. Чтобы достичь всех подвижных станций, в данное время передвигающихся в пределах задействованной географической области, это сообщение может быть передано по Каналу Управления Радиопередачей (КУР). Переданное радиотрансляционное сообщение показывает перегрузку ресурсов логических каналов АВУК в пределах текущей географической области и дает указание принимающим подвижным станциям задержать запросы низкоуровневых служб подвижной связи от обслуживающей подвижной сети.
В качестве другого варианта осуществления настоящего изобретения обслуживающей сети подвижной связи может быть назначено множество предельных уровней. В качестве иллюстрации назначен первый предельный уровень, разрешающий доступ ко всем подвижным службам, кроме служб подвижной связи самого низкого уровня, таких как службы СКС и НДДС. Второй предельный уровень может быть назначен дополнительно, чтобы ограничить следующий уровень служб подвижной связи. Например, корректировка местоположения и присоединение МИНПА могут быть дополнительно ограничены в доступе к сети. Затем может быть установлен самый высокий предельный уровень, чтобы позволить доступ только для соединений вызова. Такая иерархическая структура служб подвижной связи может быть идентифицирована и определена оператором служб и свободно связана с динамически назначаемыми предельными значениями. Затем обслуживающий КБС 60 передает соответствующее радиотрансляционное сообщение, информируя связанные подвижные станции, с каким уровнем в данное время связан текущий уровень использования.
По получении такой информации о состоянии АВУК подвижная станция, желающая запросить службы подвижной связи, сначала определяет, имеет ли эта служба подвижной связи более высокий приоритет, чем полученное состояние АВУК. Если желаемая служба подвижной связи имеет более низкий приоритет, чем текущее состояние ресурса АВУК, модуль 510 применений в мобильной станции 20 устанавливает полученные запросы в очередь. Затем может быть отображена индикация к связанному подвижному абоненту, что запрошенные службы подвижной связи поставлены в очередь и задержаны. После этого подвижная станция 20 периодически проверяет логический канал КУР, чтобы определить, уменьшился ли достаточно уровень использования АВУК, чтобы позволить доступ к сети подвижной связи. Такое определение может быть выполнено многими путями. Обслуживающим КБС 60 может быть передано другое радиотрансляционное сообщение, уведомляющее подвижные станции, движущиеся в пределах его действующей области, что уровень использования АВУК снизился. В качестве альтернативы, если проверяющие подвижные станции больше не получают радиотрансляционные сообщения по логическому каналу КУР, тогда модуль 510 применений делает предположение, что ограничение на запрос канала АВУК более не действительно. Затем модуль 510 применений извлекает предварительно установленный в очередь запрос, и этот извлеченный запрос подвижной услуги затем выполняется обычным путем.
На фиг.6 представлены этапы, выполняемые подвижной станцией, чтобы выполнить процедуру управления ресурсами АВУК в соответствии с сущностью настоящего изобретения. На этапе 500 радиотрансляционный канал, такой как Канал Управления Радиопередачей (КУР), периодически контролируется подвижной станцией, в данное время расположенной в конкретной географической области. После этого подвижная станция принимает индикацию, чтобы запросить службу подвижной связи от обслуживающей сети подвижной связи. Такая индикация может содержать номер директории входящего связанного абонента, коды услуг или функциональные клавиши. Кроме того, такая индикация может быть генерирована и детектирована внутри в подвижной станции. Более того, такая служба подвижной связи может содержать осуществление соединения исходящего вызова, передачу сообщений СКС или НДДС или выполнение корректировки местоположения. В ответ модуль применений, связанный с этой подвижной станцией, определяет, было ли получено радиотрансляционное сообщение, связанное с ресурсами АВУК, по логическому каналу КУР. Если такое сообщение о состоянии не было получено, подвижная станция выбирает решение "Нет" по 570 и выполняет запрашиваемую службу подвижной связи обычным образом на этапе 560. С другой стороны, если такая информация о состоянии была получена по радиотрансляционному каналу, подвижная станция сравнивает приоритет запрашиваемой службы подвижной связи с полученным состоянием ресурса АВУК на этапе 520. Если подвижная станция запрашивает службу, более высокую, чем состояние ресурса АВУК, в данное время индуцируемое полученным радиотрансляционным сообщением, подвижная станция выбирает решение "Нет" по 590 и запрашивает службу подвижной связи обычным образом на этапе 560. Если, однако, запрашиваемая служба подвижной связи имеет более низкий приоритет, чем полученное состояние ресурса канала, модуль применений, связанный с подвижной станцией, задерживает передачу запроса путем буферизации или установки в очередь полученного запроса. Такой запрос может быть поставлен в очередь на карте Модуля Идентификации Абонента (МИА), связанной с мобильной станцией.
После этого подвижная станция контролирует радиотрансляционный канал, чтобы определить, достаточно ли снизился уровень использования ресурса каналов, чтобы позволить подвижной станции дать запрос поставленной в очередь службы подвижной связи. Как было описано ранее, такое определение может быть выполнено либо получением другого радиотрансляционного сообщения, показывающего более низкий уровень использования, либо путем не получения никакого радиосообщения в течение заранее определенного периода времени. В качестве иллюстрации, если то же самое радиосообщение, ограничивающее запрос подвижной станции службы подвижной связи низкого уровня, передается по логическому каналу КУР, подвижная станция ожидает на этапе 540, пока это ограничивающее сообщение не будет принято.
После определения того, что уровень использования АВУК снизился, подвижная станция на этапе 550 извлекает ранее установленную в очередь службу подвижной связи. Эта извлеченная служба подвижной связи будет затем запрошена обычным образом на этапе 560.
Соответственно, путем разрешения подвижным станциям выполнять передаваемые радиосообщения обслуживающая сеть подвижной связи способна лучше использовать дорогостоящие ресурсы логических каналов АВУК для служб подвижной связи высокого приоритета, когда использование АВУК превосходит нежелательно высокий уровень.
Были представлены предпочтительные варианты осуществления способа и устройств в соответствии с настоящим изобретением, раскрытые в описании изобретения и соответствующих чертежах, причем очевидным является, что изобретение не ограничено описанным вариантом осуществления, а предполагает множество перестановок, модификаций и замен.



Изобретение относится к сетям связи и, более конкретно, к эффективному управлению ресурсами каналов в цифровой сети подвижной связи. Радиосообщение, показывающее уровень использования, связанный с Автономными Выделенными Управляющими Каналами (АВУК) в сети подвижной связи, обслуживающей конкретную географическую область, передается по каналу радиотрансляции. Множество подвижных станций, расположенных в пределах этой конкретной географической области, контролирующих этот канал радиопередачи, затем принимают передаваемое сообщение. После этого запрос на службу подвижной связи с более низким уровнем приоритета, чем показанный уровень состояния, устанавливается связанной подвижной станцией в очередь и задерживается до тех пор, пока уровень использования каналов не снизится до приемлемого сетью уровня. Технический результат, достигаемый при реализации изобретения, состоит в улучшении использования дорогостоящих ресурсов логических каналов АВУК для служб подвижной связи высокого приоритета, когда использование АВУК превосходит нежелательно высокий уровень. 4 с. и 19 з.п. ф-лы, 6 ил.
| Система радиосвязи с подвижными объектами | 1991 |
|
SU1837403A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Подвесной конвейер | 1974 |
|
SU545533A1 |
| US 5130983 А, 14.07.1992 | |||
| US 5442809 А, 15.08.1995. | |||

