Изобретение относится к устройству для производства изделия в виде оболочки с начинкой, такой как соевая паста. Более конкретно, оно относится к устройству для производства изделия в виде оболочки с начинкой, такой как соевая паста, в котором согласование фаз действия и скорость открывания и закрывания затворного механизма, содержащего затворные элементы, отрезного устройства можно легко контролировать.
Из японского патента 2641033 известно устройство, которое содержит механизм для открывания и закрывания затворных элементов. Он состоит из затворных элементов отрезного устройства. Затворные элементы можно поворачивать в одну и другую стороны вокруг осей, расположенных с регулярными интервалами. Оси соединены между собой тягами так, что они взаимосвязаны. Одна из тяг шарнирно соединена с кривошипом. Он соединен с валом первого управляющего двигателя так, что кривошип совершает качательные движения.
Кроме того, для сообщения вращательного движения кулачковому механизму используют второй управляющий двигатель. В соответствии с движениями кулачкового механизма, как конвейеру, на который принимают обернутое пищевое изделие, так и отрезному устройству сообщают движение вверх и вниз. В этом известном устройстве операциями открывания и закрывания затворного механизма, выполняемыми затворными элементами, можно управлять независимо от перемещения вверх и вниз отрезного устройства. В этом устройстве для изменения производительности выпуска пищевых изделий, например, дневной или часовой, можно регулировать вращением валов двигателей, чтобы изменить скорости движения вверх и вниз конвейера и отрезного устройства. При этом следует регулировать согласование фаз движения операций открывания и закрывания затворных элементов, чтобы соответствовать изменениям скоростей движений вверх и вниз конвейера и отрезного устройства.
В обычном устройстве для открывания и закрывания затворного механизма используют первый управляющий двигатель. Однако его не используют для управления движениями вверх и вниз конвейера и отрезного устройства. Ими управляют с помощью второго управляющего двигателя. Таким образом, одновременно с согласованием этих движений конвейера и отрезного устройства необходимо осуществлять согласование операций открывания и закрывания путем изменения направления и углов поворота вала первого управляющего двигателя и согласование по времени пуска и останова качательных движений затворного механизма. Эти регулировки сложны и вызывают затруднения при обслуживании.
Технической задачей настоящего изобретения является преодоление указанных выше недостатков.
Данная техническая задача решается за счет того, что в устройстве для производства изделий в виде оболочки с начинкой, такого как соевая паста, содержащем отрезное устройство, установленное с возможностью перемещения вверх и вниз, которое включает множество затворных элементов, которые открываются и закрываются для отрезания пищевого материала в виде стержня, который подают посредством соединительного сопла, устройство для приема пищевого материала для размещения пищевого материала, нарезанного с помощью отрезного устройства на изделия в виде оболочки с начинкой, первый управляющий двигатель для открывания и закрывания множества затворных элементов и второй управляющий двигатель для перемещения отрезного устройства и устройства для приема пищевого продукта вверх и вниз, согласно изобретению исходное положение устанавливают в одной определенной точке на валу первого управляющего двигателя, когда передние края затворных элементов сходятся в центральном положении затворного механизма, или в другой определенной точке на том же самом валу, которая смещена на 180o по фазе относительно первой определенной точки, или в одной определенной точке на его валу, когда затворные элементы открыты, или в другой определенной точке на том же валу, которая смещена на 180o по фазе от первой определенной точки.
Предпочтительно исходную точку устанавливают в определенной точке на валу второго управляющего двигателя, когда устройство для приема пищевого продукта поднято в крайнее верхнее положение или опущено в крайнее нижнее положение.
Предпочтительно валы первого и второго управляющих двигателей вращаются в одном направлении, при этом для открывания и закрывания затворных элементов отрезного устройства, между первым управляющим двигателем и механизмом открывания и закрывания затворных элементов установлен первый кулачковый механизм, причем первый кулачковый механизм вращается в заданном направлении так, чтобы затворные элементы могли быть открыты и закрыты с помощью механизма для открывания и закрывания затворных элементов, и при этом для перемещения вверх и вниз устройства для приема пищевого продукта между вторым управляющим двигателем и механизмом установлен второй кулачковый механизм, причем второй кулачковый механизм вращается в заданном направлении так, чтобы устройство для приема пищевого продукта могло перемещаться вверх и вниз посредством механизма для перемещения вверх и вниз.
Кроме того, предпочтительно контроллер двигателей установлен для управления скоростями вращения в диапазоне заданных углов поворота за один оборот каждого или обоих валов первого и второго управляющих двигателей.
Предпочтительно валы первого и второго управляющих двигателей вращаются синхронно.
Предпочтительно валы первого и второго управляющих двигателей вращаются синхронно, причем по меньшей мере один из валов первого и второго управляющих двигателей удобно регулируется в диапазоне углов поворота.
Кроме того, предпочтительно в устройстве для хранения режимов управления первым и вторым управляющими двигателями в контроллере двигателей установлено запоминающее устройство.
Далее изобретение будет пояснено более подробно со ссылкой на прилагаемые чертежи, на которых
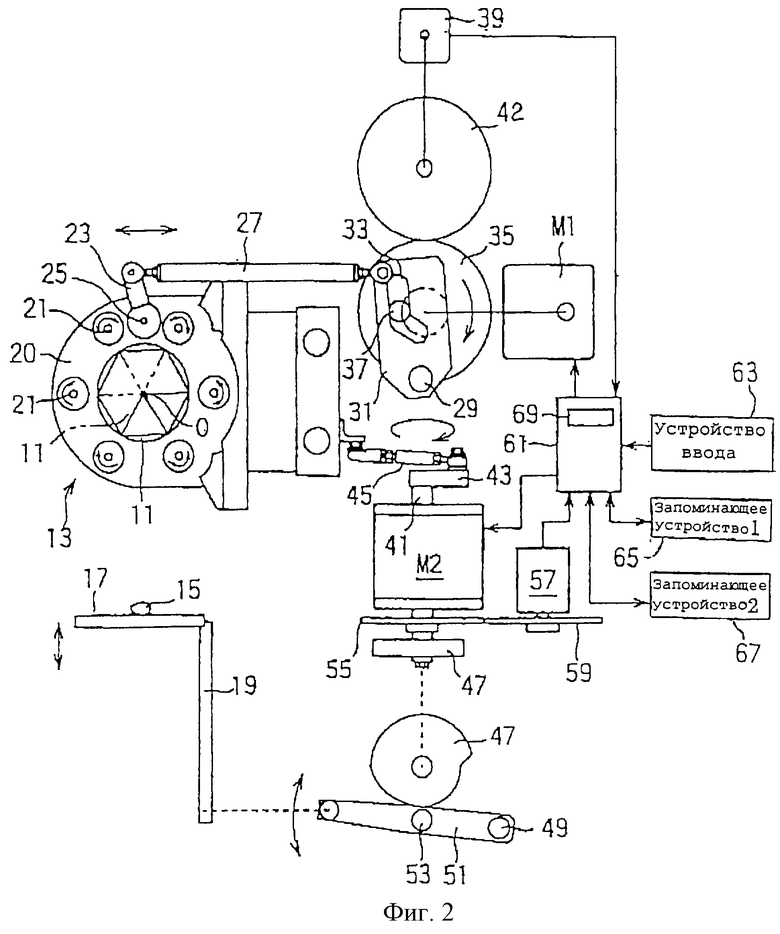
фиг. 1 - вид спереди устройства для производства изделий в виде оболочки с начинкой согласно настоящему изобретению;
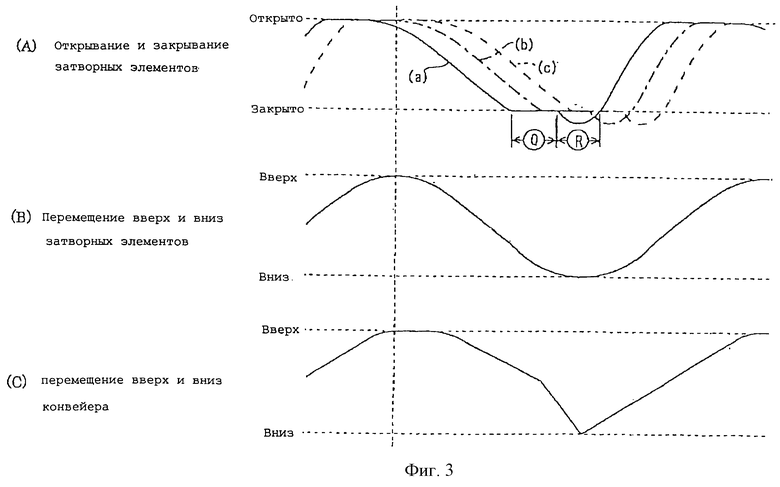
фиг. 2 - существенные части, соответствующие принципу действия, отличительным особенностям и функциям в общем устройстве для формования изделия в виде оболочки с начинкой;
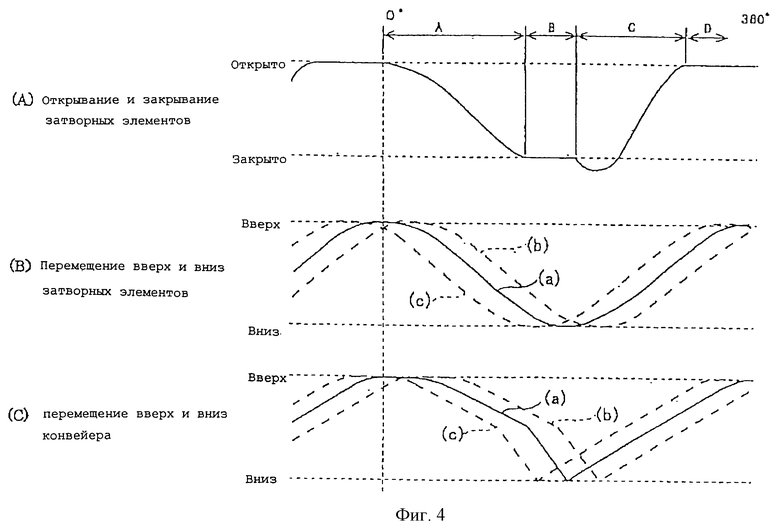
фиг.3А, 3В и 3С - циклограммы взаимодействия перемещений затворных элементов при открывании и закрывании и перемещений вверх и вниз отрезного устройства;
фиг.4А, 4В и 4С - циклограммы взаимодействия перемещений затворных элементов при открывании и закрывании и перемещений вверх и вниз отрезного устройства.
На фиг.1 показан вариант исполнения устройства 1 для производства изделий в виде оболочки с начинкой согласно настоящему изобретению. Оно содержит каркас 3. В верхней части устройства расположена секция 5 для подачи материала начинки, например соевой пасты. Кроме того, в этой части расположена секция 7 для подачи материала для оборачивания, например теста. Помимо этого, в этой части расположено соединительное сопло 9 для оборачивания материала начинки, которая подается посредством секции 5 для подачи начинки в материал для оборачивания, который подают с помощью секции 7 для подачи материала для оборачивания, в результате чего формируется пищевой продукт в виде стержня и подается вниз.
Для секции 5 для подачи начинки, секции 7 для подачи материала для оборачивания и для соединительного сопла 9 могут быть использованы известные устройства. Поэтому они не будут здесь подробно описаны.
Под соединительным соплом 9 расположено отрезное устройство 13. Его можно перемещать вверх и вниз. Оно содержит затворный механизм, включающий множество затворных элементов 11 (фиг.2). Их используют для отрезания пищевого материала в виде стержня, который подается соединительным соплом 9 так, чтобы сохранять материал начинки обернутым. Под отрезным устройством 13 расположен конвейер 17, предназначенный для размещения отрезанных обернутых пищевых изделий 15. Конвейер является примером устройства для приема пищевого продукта, предназначенного для размещения отрезанных обернутых пищевых изделий 15. Конвейер 17 их транспортирует к следующему пункту. Часть конвейера, которая расположена под отрезным устройством 13, поддерживается подъемным устройством 19. Подъемное устройство 19 может подниматься и опускаться так, что эта часть может также перемещаться вверх и вниз.
Отрезное устройство 13 включает кольцевой корпус 20. По окружности корпуса 20 расположено с одинаковым интервалом множество шарниров 21. Их можно вращать обычным образом. Каждый шарнир соединен с соответствующим затворным элементом 11 так, что их можно перемещать совместно. Таким образом, когда шарниры 21 поворачивают в одном направлении и противоположном направлении, затворные элементы 11 отодвигаются один от другого (чтобы образовать отверстие) и сходятся (чтобы закрыть отверстие) соответственно. Конструкция, в которой затворные элементы открывают и закрывают поворотом в одном направлении и противоположном направлении шарниров, известна. Поэтому подробное описание конструкции здесь не приводится.
В качестве механизма для открывания и закрывания затворных элементов 11 используют вал 25 для открывания и закрывания, расположенный на корпусе 20. Вал 25 можно приводить в движение обычным образом. Рычаг 23 для открывания и закрывания жестко связан с ним. Вал 25 и шарниры 21 могут быть соединены, например, с помощью зубчатых колес или посредством затворных элементов 11, которые взаимосвязаны. Таким образом, вал 25 для открывания и закрывания и шарниры 21 также взаимосвязаны. Такой механизм позволяет затворным элементам быть взаимосвязанными так, чтобы открываться и закрываться. Любой известный механизм можно использовать в качестве такого механизма. Поэтому его более подробное описание не приводится.
Когда рычагу 23 для открывания и закрывания сообщают качательное движение, затворные элементы 11 открываются и закрываются. Для выполнения этой операции один конец соединительной тяги 27 шарнирно сопряжен с концом рычага 23 для открывания и закрывания. Другой конец соединительной тяги 27 шарнирно сопряжен с концом качающегося элемента 31. Качающийся элемент 31 служит в качестве части кулачкового механизма и может быть повернут вокруг оси 29. В качающемся элементе 31 выполнен профильный паз 33 кулачкового механизма, например, L-образной формы. Следящий элемент 37 расположен эксцентрично на приводном зубчатом колесе 35, которое можно вращать только в одном направлении. Следящий элемент 37 взаимодействует с профильным пазом 33 кулачкового механизма так, что следящий элемент может обычным образом перемещаться вдоль паза 33 кулачкового механизма.
Для управления вращением приводного зубчатого колеса 35 установлен первый управляющий двигатель M1, такой как серводвигатель. Когда вал двигателя M1 делает один оборот, приводное зубчатое колесо 35, которое является частью кулачка, также поворачивается на один оборот в том же направлении. Для определения положения при повороте вала первого управляющего двигателя M1 зубчатое колесо 42, которое имеет такой же диаметр, что и зубчатое колесо 35, находится в зацеплении с зубчатым колесом 35. Зубчатое колесо 42 используют в качестве датчика положения импульсного датчика 39. Это пример датчика положения при повороте.
Таким образом, когда вал первого управляющего двигателя M1 вращается в одном направлении, одновременно зубчатое колесо 35 поворачивается так, что следящий элемент 37, который жестко закреплен на нем, тоже поворачивается. В соответствии с этим качающийся элемент 31 поворачивается вокруг оси 29. В соответствии с этим рычаг 23 для открывания и закрывания поворачивается соединительной тягой 27. Соединительная тяга 27 связана с качающимся элементом 31. В результате затворные элементы 11 открываются и закрываются. Когда вал управляющего двигателя M1 поворачивается на один оборот, поворотное зубчатое колесо 35 также делает один оборот, так что качающийся элемент 31 и рычаг 23 для открывания и закрывания совершают возвратно-поступательное движение один раз. Таким образом, затворные элементы 11 выполняют один набор операций открывания и закрывания.
Как указано выше, импульсный датчик определяет положение при повороте на валу первого управляющего двигателя M1, когда он поворачивается на один оборот. Импульсный датчик 39 положения при повороте генерирует импульс в соответствии со значениями углов поворота вала и генерирует исходный импульс при каждом обороте вала. Таким образом, положение при вращении вала первого управляющего двигателя M1 может быть определено путем счета количества импульсов, генерируемых после генерирования исходного импульса.
Исходную точку для первого управляющего двигателя M1 устанавливают в соответствии с условиями, существующими, когда концы затворных элементов 11 встречаются в центральном положении "О" отрезного устройства 13. Более подробно, каждый затворный элемент выполнен так, что имеет часть, которая выступает в направлении центрального положения "О" в средней точке его наиболее толстой части. Он также выполнен так, что имеет нижний край, который может встречаться с нижними краями других затворных элементов в центральном положении "О". Когда нижние края затворных элементов сходятся в центральном положении "О", нижние поверхности затворных элементов образуют гладкую поверхность. В этих условиях положение при вращении вала первого управляющего двигателя M1 устанавливают как исходное положение.
Исходное положение вала первого управляющего двигателя M1 не ограничено этим положением. Исходное положение может быть установлено в положении при вращении вала первого двигателя M1, когда первые края затворных элементов сходятся в центральном положении "О". Обычно, когда нижние края затворных элементов сходятся в центральном положении "О", одновременно верхние края сходятся в этом положении. В альтернативном варианте исполнения исходное положение может быть установлено при положении вала, которое смещено на 180o от исходного положения, когда затворные элементы 11 находятся в открытом положении.
Это значит, что исходное положение на валу первого управляющего двигателя M1 может быть определено, когда затворные элементы находятся в открытом положении (как показано на фиг.2, когда соединительная тяга 27 смещена в правое положение) или когда фаза открывания затворных элементов смещена на 180o от этого положения (т.е. когда затворные элементы 11 находятся в закрытом положении). Таким образом, для того, чтобы легко управлять операциями открывания и закрывания затворных элементов 11, исходное положение вала первого управляющего двигателя M1 устанавливается в соответствии с исходным положением, при котором затворные элементы 11 перемещаются в определенные положения.
Как указано выше, исходное положение вала первого управляющего двигателя M1 устанавливается в положение, при котором затворные элементы перемещают в определенные положения, чтобы можно было легко управлять операциями открывания и закрывания затворных элементов отрезного устройства 13. Таким образом, импульсный датчик 39 позволяет отличать положения при вращении вала первого управляющего двигателя M1 от исходного положения. Помимо этого импульсный датчик 39 позволяет отличать положения открывания и закрывания и условия открывания и закрывания от взаимного расположения профильного паза 33 кулачкового механизма и следящего элемента 37 и т.д. Таким образом, условия открывания и закрывания, скорости открывания и закрывания и т.д. можно легко контролировать посредством управления положением вала первого управляющего двигателя M1.
Второй управляющий двигатель М2 установлен так, что с его помощью можно поднимать и опускать отрезное устройство 13 и подъемное устройство 19. На фиг. 2 схематически упрощенно показано устройство согласно настоящему изобретению и принцип его действия просто для пояснения принципа действия и функций устройств. Кривошип 43 соединен с валом 41 второго управляющего двигателя М2 так, что, когда вал делает один оборот, кривошип 43 поворачивается на один оборот соответственно. Один конец тяги 45 соединен с кривошипом 43. Другой конец соединен с определенной точкой отрезного устройства 13.
Таким образом, отрезное устройство 13 перемещают вверх и вниз кривошипом 43 и тягой 45, когда вращают вал 41 второго управляющего двигателя М2. Таким образом, когда вал 41 второго управляющего двигателя М2 поворачивают на один оборот, отрезное устройство 13 перемещается вверх и вниз за один (каждый) цикл.
На другом конце вала 41 второго управляющего двигателя М2 зафиксирован кулачок 47 так, чтобы перемещать вверх и вниз подъемное устройство 19. Следящий элемент 53, который расположен на качающемся рычаге 51, постоянно находится в контакте с поверхностью кулачка 47. Качающийся рычаг 51 поворачивается вверх и вниз вокруг точки 49, расположенной на его конце. Передний конец качающегося рычага 51 соединен с определенной точкой подъемного устройства 19.
Таким образом, вал 41 второго управляющего двигателя М2 вращают, чтобы вращать кулачок 47. Подъемное устройство 19 перемещают вверх и вниз с помощью качающегося рычага 51. Таким образом, когда вал 41 второго управляющего двигателя М2 поворачивают на один оборот, подъемное устройство 19 поднимается и опускается за один (каждый) цикл.
Следует иметь ввиду, что отрезное устройство 13 и подъемное устройство 19 перемещают синхронно вверх и вниз с помощью общего второго управляющего двигателя М2. Кривошипом 43 перемещают отрезное устройство 13 вверх и вниз так, что отрезное устройство 13 перемещается по синусоидальному закону, когда вал второго управляющего двигателя М2 вращают с постоянной скоростью. Подъемное устройство 19 перемещается вверх и вниз в соответствии с формой кулачка 47. Следует отметить, что, когда отрезное устройство 13 перемещают в крайнее верхнее положение, подъемное устройство 19 также перемещается в крайнее верхнее положение. А также, когда отрезное устройство 13 перемещают в крайнее нижнее положение, подъемное устройство 19 также перемещается в крайнее нижнее положение.
Для определения положения при вращении вала второго управляющего двигателя М2, на валу 41 установлено зубчатое колесо 55. Импульсный датчик 57 используют в качестве примера датчика положения при вращении. Импульсный датчик 57 снабжен зубчатым колесом 59, которое имеет такой же диаметр, что и зубчатое колесо 55. Зубчатое колесо 59 находится в зацеплении с зубчатым колесом 55. Импульсный датчик 57 такой же, как и импульсный датчик 39. Это значит, что положение, при котором генерируется исходный импульс импульсным датчиком 57, является исходным положением вала второго управляющего двигателя М2. Это исходное положение устанавливают в положение, когда отрезное устройство 13 и подъемное устройство 19 подняты в их крайние верхние положения. В альтернативном варианте выполнения исходное положение может быть установлено в положение, когда отрезное устройство 13 и подъемное устройство 19 опущены в их крайние нижние положения. Таким образом, это положение будет смещено от того положения на 180o.
Так как исходное положение вала второго управляющего двигателя М2 устанавливают так, чтобы оно соответствовало положению, при котором отрезное устройство 13 перемещается вверх или вниз, положение отрезного устройства 13 во время его движения может быть определено путем определения положения при вращении вала второго управляющего двигателя М2. Таким образом, положения и скорости перемещения отрезного устройства 13 можно контролировать посредством управления положением вала второго управляющего двигателя М2.
Контроллер 61 двигателей установлен для управления вращением валов первого и второго управляющих двигателей M1 и М2. Устройство ввода 63 соединено с контроллером 61 двигателей и предназначено для ввода управляющих данных для того, чтобы управлять вращением валов первого и второго управляющих двигателей M1 и М2. Контроллер 61 двигателей содержит первое и второе запоминающие устройства 65 и 67 для хранения режимов управления первым и вторым управляющими двигателями M1 и М2. Кроме того, контроллер 61 двигателей содержит секцию 69 для управления вращением так, чтобы вращать валы первого и второго двигателей M1 и М2 синхронно, или так, чтобы раздельно управлять их вращением.
Под контролем секции 69 для управления вращением, которая содержится в контроллере 61 двигателей, если, например, вал второго управляющего двигателя М2 вращается с постоянной скоростью в одном направлении, как показано на фиг. 3(В), то отрезное устройство 13 будет перемещаться вверх и вниз по синусоидальному закону. Помимо этого, как показано на фиг.3(С), подъемное устройство 19 будет перемещаться вверх и вниз синхронно с движениями вверх и вниз отрезного устройства 13, и в соответствии с циклограммой, определенной формой кулачка 47.
Если вал первого управляющего двигателя M1 вращают с постоянной скоростью в одном направлении, как показано на фиг. 3(А) (а), то каждый затворный элемент открывается и закрывается в соответствии с циклограммой, определенной формой профильного паза 33 кулачкового механизма. В циклограмме часть, обозначенная "Q", представляет период, когда затворный элемент удерживают закрытым. Часть "R" представляет условие, при котором затворные элементы закрыты и движутся для перекрывания. Периоды "Q" и "R" определяют формой профильного паза 33 кулачкового механизма.
Часть "Q" циклограммы может быть сформирована временным остановом вращения вала первого управляющего двигателя M1.
Кривые, показанные на фиг.3(А) (b) и (с), описывают условия, когда вал первого управляющего двигателя M1 вращают в фазе относительно вращения вала второго управляющего двигателя М2 путем ввода данных посредством устройства ввода 63. На фиг.4 показаны кривые, которые описывают условия, когда вращение вала второго управляющего двигателя М2 смещают по фазе относительно вращения вала первого управляющего двигателя M1.
Первым и вторым управляющими двигателями можно управлять синхронно или отдельно с помощью секции 69 контроля вращения. Кроме того, можно контролировать скорости вращения валов соответствующих двигателей в пределах желаемых углов поворота. На фиг.4(А) показана зона А углов за время одного оборота вала первого управляющего двигателя M1, от того положения, когда затворные элементы 11 открыты, до того положения, когда они уже закрыты. На фиг. 4(А) также показана зона В углов, когда затворные элементы 11 удерживают закрытыми. На фиг.4(А) также показана зона С углов, в период времени от того положения, когда затворные элементы 11 закрыты, до того положения, когда они уже открыты. Помимо этого, на фиг.4(А) показана зона D углов, в период времени, когда затворные элементы 11 удерживают открытыми. Таким образом, как показано на фиг. 4(А), в периоды времени, ограниченные зонами А, В, С и D, скорости вращения вала первого управляющего двигателя M1 можно контролировать.
Формы зон А, В, С и D задают посредством формы профильного паза 33 кулачкового механизма. Определенные формы этих зон используют, когда вал первого управляющего двигателя M1 вращают с определенной постоянной скоростью. Если скорость подачи пищевого материала в виде стержня изменяют, то скорости вращения валов первого и второго управляющих двигателей M1 и М2 синхронно снижаются, когда, как показано на фиг.3(В) и 3(С), отрезное устройство 13 и конвейер перемещают вверх и вниз, и, как показано на фиг.3 (А), затворные элементы 11 открывают и закрывают в соответствии с кривыми (а), (b) или (с), или когда, как показано на фиг.4(А), затворные элементы открывают или закрывают, и, как показано на фиг.4(В) и 4(С), конвейер перемещают вверх и вниз в соответствии с кривыми (а), (b) или (с). Таким образом, операция отрезания пищевого материала в виде стержня удовлетворительно выполнена.
В этом случае, когда вращение вала первого управляющего двигателя M1 изменяют, скорости открывания и закрывания затворных элементов 11 изменяются. Эти скорости открывания и закрывания можно варьировать в допустимых пределах, в которых изменение не оказывает влияния на пищевой материал 15, но может изменять скорость изготовления пищевого материала.
В обычных устройствах, описанных выше, для изменения скорости изготовления пищевых материалов, когда отрезное устройство и элемент для приема пищевого изделия перемещаются вверх и вниз, необходимо одновременно устанавливать и изменять направление и углы поворота, и время начала и окончания вращения для начала и окончания возвратно-поступательного движения. Таким образом, эти наладочные операции и изменения были неудобны.
В общем, имеет место тенденция к очень большому расширению диапазона варьирования скорости закрывания затворных элементов для изменения в широких пределах скорости изготовления пищевых продуктов в виде оболочки с начинкой.
При использовании обычных устройств было сложно обеспечить такие изменения скорости изготовления. В соответствии с настоящим изобретением, например, когда скорость операции закрывания затворных элементов 11 контролируют так, чтобы они были быстрее или медленнее, путем контролирования скорости вращения вала первого управляющего двигателя M1 в зоне А углов так, чтобы отрезать пищевой материал в виде стержня, который экструдируют с постоянной скоростью, скорости вращения вала в любой из зон В, С и D можно регулировать. Путем такого регулирования время одного оборота вала первого управляющего двигателя M1 может быть сохранено постоянным, благодаря чему могут быть выполнены некоторые виды операций отрезания пищевого продукта в виде стержня. В этом случае кулачковый механизм используют для закрывания затворных элементов 11 так, что циклограммы операций затворных элементов всегда остаются теми же самыми. Кроме того, работу первого управляющего двигателя M1 легко контролировать.
Подобные операции могут быть выполнены со вторым управляющим двигателем М2. Например, скорость отрезного устройства 13, когда оно опускается, можно контролировать в ответ на операцию закрывания затворных элементов 11. Помимо этого отрезное устройство 13 можно быстро поднять. Таким образом, в условиях, когда время одного оборота вала второго управляющего двигателя М2 поддерживают постоянным, отрезное устройство 13 и конвейер 17 можно перемещать вверх и вниз с помощью подъемного элемента 19.
Так как исходные положения устанавливают для первого и второго управляющих двигателей M1 и М2, можно предварительно задать диапазоны углов поворота валов первого и второго двигателей M1 и М2 в соответствии с зонами А, В, С и D.
Если, например, скорости вращения валов первого и второго управляющих двигателей M1 и М2 увеличивают для того, чтобы повысить скорость изготовления пищевого продукта, то время операции закрывания в зоне А углов может быть уменьшено так, что пищевой продукт в виде стержня не сможет быть удовлетворительно отрезан. В этом случае, если время операции закрывания в зоне А углов сохраняют на обычном значении в течение определенного времени, тогда как периоды времени в зонах С и D сокращают (т.е. вал вращают быстрее), то можно обеспечить хорошее качество выполнения операции отрезания пищевого продукта в виде стержня при обычных условиях. Помимо этого скорость изготовления пищевого продукта может быть повышена. Зону углов поворота вала второго управляющего двигателя М2, соответствующую зоне А для вала первого управляющего двигателя M1, устанавливают в соответствии с режимом, определенным при обычных условиях. Кроме того, в зонах, соответствующих зонам С и D для первого управляющего двигателя M1, количество оборотов вала второго управляющего двигателя М2 устанавливают так, чтобы оно было высоким.
Валы первого и второго управляющих двигателей M1 и М2 вращают в определенных направлениях. Таким образом, даже если в каждой зоне вращение валов этих двигателей изменяют, эти изменения не производят резко, а могут быть выполнены плавно.
Режим движения каждого затворного элемента и конвейера определяют путем изменения скорости углов поворота каждого вала так, чтобы отрезать пищевой продукт в виде стержня. Эти режимы хранят в запоминающих устройствах 65, 67, которые действуют как накопители. Таким образом, первым и вторым управляющими двигателями M1 и М2 можно непосредственно управлять путем использования режимов, когда пищевой продукт в виде стержня разрезают при тех же условиях. Кроме того, одинаковые режимы движений могут быть повторены.
Таким образом, чтобы повторно отрезать пищевой продукт в виде стержня в соответствии с теми же требованиями, режим, который ранее был сохранен в запоминающих устройствах 65, 67, может быть использован для контролирования первого и второго управляющих двигателей M1 и М2. Таким образом, этими двигателями можно легко управлять.
Как было указано выше, режимы движений вверх и вниз и движений закрывания и открывания затворных элементов отрезного устройства определяют кулачковым механизмом. Исходные положения валов первого и второго управляющих двигателей устанавливают так, чтобы они соответствовали определенным точкам на циклограммах для контролирования вращения кулачка. Положения при вращении валов первого и второго управляющих двигателей соответствуют положениям в зонах углов циклограмм. Таким образом, скорость в пределах углов поворота на циклограммах движений можно легко контролировать.
Таким образом, если для изменения скорости изготовления пищевого продукта синхронно изменяют скорости вращения валов первого и второго управляющих двигателей, или, если скорость вращения в пределах специальных углов поворота изменяют, то можно легко установить такие условия, чтобы удовлетворительно отрезать пищевой продукт в виде стержня. Таким образом могут быть преодолены недостатки обычных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОРМУЮЩИЙ ЗАТВОРНЫЙ АППАРАТ И ЕГО ЗВЕНО ЗАТВОРА | 2006 |
|
RU2379895C1 |
| УСТРОЙСТВО ДЛЯ НЕПРЕРЫВНОГО НАРЕЗАНИЯ И ФОРМОВАНИЯ ПИЩЕВОГО ПРОДУКТА (ВАРИАНТЫ) И СПОСОБ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1999 |
|
RU2188549C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ПИЩЕВОГО ПРОДУКТА СФЕРИЧЕСКОЙ ФОРМЫ, СОСТОЯЩЕГО ИЗ ЗАМКНУТОЙ НАРУЖНОЙ ОБОЛОЧКИ И СЕРДЦЕВИНЫ | 1990 |
|
RU2019982C1 |
| УСТРОЙСТВО ДЛЯ НАРЕЗАНИЯ И ФОРМОВАНИЯ СФЕРИЧЕСКОГО ТЕЛА ИЗ БРУСКА ТЕСТА | 1997 |
|
RU2137371C1 |
| ОТСАДОЧНАЯ МАШИНА ДЛЯ ПРОИЗВОДСТВА ИЗДЕЛИЙ С НАЧИНКОЙ И УСОВЕРШЕНСТВОВАННЫЙ ЭКСТРУЗИОННО-ФОРМУЮЩИЙ УЗЕЛ ДЛЯ ЭТОЙ МАШИНЫ | 2007 |
|
RU2361402C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСКАТЫВАНИЯ ПИЩЕВОГО ТЕСТА И ДИСКООБРАЗНОЕ ТЕСТО, ПОЛУЧЕННОЕ ЭТИМ СПОСОБОМ | 2006 |
|
RU2383136C2 |
| МЕХАНИЗМ РАСКРЫТИЯ И ЗАКРЫВАНИЯ ФОРМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2187469C2 |
| СЕКЦИОННАЯ МАШИНА | 1998 |
|
RU2200713C2 |
| СЕКЦИОННАЯ МАШИНА | 2001 |
|
RU2245306C2 |
| РАЗГРУЗОЧНЫЙ МЕХАНИЗМ ДЛЯ СЕКЦИОННОЙ МАШИНЫ | 1998 |
|
RU2186041C2 |
Изобретение относится к устройству для производства изделия в виде оболочки с начинкой, такой как соевая паста. Устройство для оборачивания начинки содержит отрезное устройство, установленное с возможностью перемещения вверх и вниз для открывания и закрывания затворных элементов и для отрезания пищевого материала в виде стержня для формирования обернутого пищевого изделия, и устройство для размещения пищевого материала, выполненное с возможностью перемещения вверх и вниз для размещения обернутого пищевого изделия. Затворные элементы открыты в соответствии со схемой перемещения для их открывания и закрывания, а отрезное устройство перемещается вверх и вниз в соответствии со схемой перемещения для перемещения вверх и вниз. Устройство для размещения пищевого материала перемещается вверх и вниз в соответствии со схемой для перемещения вверх и вниз. Отрезное устройство, затворные элементы и устройство для размещения пищевого материала синхронизированы на каждом рабочем диапазоне схемы перемещения для закрывания затворных элементов, удержания затворных элементов закрытыми, для открывания затворных элементов и для удержания затворных элементов открытыми. Изобретение позволяет упростить регулировку устройства. 7 з.п. ф-лы, 4 ил.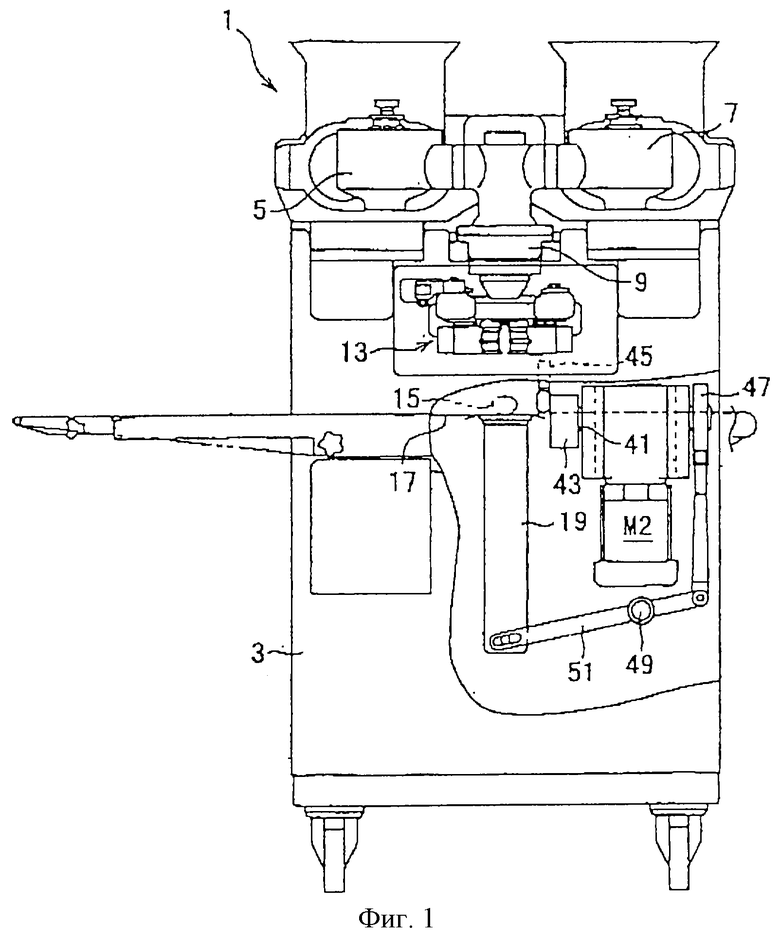
| Устройство для приготовления полуфабрикатов изделий из теста с начинкой | 1988 |
|
SU1546040A1 |
| УСТРОЙСТВО ПЕРЕРАБОТКИ ТЕСТА НАГРЕВОМ И ХЛЕБНОЕ ИЗДЕЛИЕ "БУТЕРБРОД ПО-МОСКОВСКИ" | 1992 |
|
RU2073976C1 |
| ВИТКОВАЯ ПРУЖИНА | 0 |
|
SU236134A1 |
