Настоящее изобретение направлено на контроль отклонений в таре в процессе ее производства (промышленные отклонения), которые воздействуют на оптические свойства тары, и более конкретно, на способ и аппаратуру для контроля тары, основанные на сравнении двухмерных изображений контролируемых частей тары.
ПРЕДШЕСТВУЮЩЕЕ СОСТОЯНИЕ ТЕХНИКИ И ПРЕДМЕТЫ ИЗОБРЕТЕНИЯ
В производстве тары, такой как стеклянные бутылки и банки, могут иметь место различные отклонения в боковых стенках, пятках, плечиках, горлышках и/или отделке тары. Эти отклонения, называемые в технике "промышленными отклонениями", могут влиять на промышленную приемлемость тары. Предлагается использовать устройство электронно-оптического контроля для обнаружения промышленных отклонений, которые воздействуют на оптические свойства тары. Основной принцип состоит в том, что устанавливается источник света для направления на тару световой энергии, и устанавливается камера для приема изображения части(частей)тары, облученной источником света. Источник света может иметь равномерную яркость или может быть сформирован так, чтобы иметь яркость, изменявшуюся в одном измерении источника света. Промышленные отклонения в части тары, освещенной источником света, определяются как функция от яркости света в изображении освещенной тары, принятом и записанном в камере.
Патент США 4945228 описывает устройство для проверки герметизирующей поверхности отделки тары, которая включает источник света, установленный для направления световой энергии на герметизирующую поверхность тары, в то время как тара размещается в стационарном положении и вращается вокруг своей центральной оси. Камера включает линейную матрицу или матричный (растровый) набор светочувствительных элементов, устанавливается и ориентируется относительно оси вращения тары так, чтобы принимать световую энергию, отраженную от герметизирующей поверхности, причем камера имеет эффективную зону обзора, ограниченную угловым участком, меньшим, чем полная окружность герметизирующей поверхности тары. Матрица камеры сканируется на приращениях поворота тары, чтобы визуализировать информацию, указывающую яркость света на каждом матричном элементе как функцию таких приращений, а промышленные отклонения на герметизирующей поверхности тары детектируются как функция этой информации. Описанное таким образом устройство хорошо адаптировано для обнаружения промышленных отклонений, которые воздействуют на отражательную способность герметизирующей поверхности тары, такие как морщины в отделке, раковины, зерна и грязная отделка тары.
Патент США 5489987 описывает устройство для проверки зоны герметизирующей поверхности тары, которая включает источник света, установленный для направления узкого луча световой энергии под острым углом на зону герметизирующей поверхности тары, в то время как тара вращается вокруг своей центральной оси. Светочувствительный датчик размещен для приема узкого луча световой энергии, отраженной от зоны герметизирующей поверхности, и выдает выходной сигнал, изменяющийся как функция места падения отраженного светового луча на светочувствительный датчик. То есть отраженный луч света падает на светочувствительный датчик в месте, которое изменяется с высотой или уровнем герметизирующей поверхности относительно источника света и светочувствительного датчика, и датчик характеризуется формированием электрического выходного сигнала, изменяющегося как функция места падения отраженного светового луча на светочувствительном датчике. Изменения по высоте в зоне герметизирующей поверхности детектируются как функция выходного сигнала датчика. В одном варианте пары источник/датчик размещены на диаметрально противоположных сторонах оси тары, и деформация, впадина и/или подъем на герметизирующей поверхности тары детектируется как комбинированная функция изменений в месте падения отраженных световых лучей на светочувствительных датчиках по мере того, как тара вращается.
Одновременно рассматривается заявка США 08/856829, которая описывает способ и аппаратуру для контроля герметизирующей поверхности тары. В одном варианте первый и второй источники света направляют световую энергию на герметизирующую поверхность тары под разными углами относительно оси контейнера и номинальной плоскости герметизирующей поверхности. Световая энергия от первого и второго источников света, отраженная зоной герметизирующей поверхности тары, направляется на растровый матричный датчик таким образом, что датчик эффективно регистрирует зону герметизирующей поверхности тары с двух разных углов, соответствующих углам освещения от источников света. Различные источники света имеют различную структуру или природу для освещения герметизирующей поверхности светом, имеющим различные свойства, а также различные углы освещения для определения различных физических и/или размерных характеристик герметизирующей поверхности тары. Источники света подключаются попеременно, а растровый матричный светочувствительный датчик сканируется для сформирования последовательных двухмерных изображений, показывающих разные характеристики герметизирующей поверхности. Неточности могут возникнуть как в связи с движением тары между последовательными сканированиями кадра, так и в связи с попаданием окружающего света на растровый матричный датчик во время каждого кадра изображения. Когда сущность изобретения этой сопутствующей заявки осуществляется на так называемом холодном конце процесса производства тары, на котором тара удерживается в стационарном положении и вращается вокруг своей центральной оси, тара будет не только подвергаться ограниченному вращению между последовательными сканированиями кадра, но также может колебаться в продольном направлении между последовательными сканированиями кадра. Подобным образом, когда этот процесс осуществляется на так называемом горячем конце процесса производства, на котором тара перемещается в направлении, перпендикулярном его оси под устройством контроля, поверхность герметизации тары (или другая проверяемая зона) между последовательными сканированиями кадра будет перемещаться на ограниченное расстояние. Для получения надежной информации о контроле во время операции контроля важно минимизировать воздействие как движения тары, так и окружающего света. Главной задачей настоящего изобретения является создание способа и аппаратуры для проверки тары, в которых решается одна или обе эти задачи.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Устройство для проверки тары в соответствии с настоящим предпочтительным вариантом изобретения включает первый источник света для генерации световой энергии первого вида и направления этой световой энергии на предварительно определенную часть проверяемой тары и второй источник света световой энергии второго вида, отличного от первого, и направления этой световой энергии на ту же предварительно определенную часть проверяемой тары. Растровый матричный светочувствительный датчик размещен для приема двухмерного изображения части тары, освещенной первым и вторым источниками света. Первый и второй источники света подключаются последовательно попеременно, и первое, и второе двухмерные изображения проверяемой части тары загружаются со светочувствительного датчика. Промышленные отклонения, воздействующие на оптические свойства тары, определяются сравнением первого и второго двухмерных изображений от соответствующих источников света, сканированных со светочувствительного датчика. Датчик предпочтительно включает устройство для сканирования двухмерных изображений в последовательные кадры, и первое, и второе изображения формируются путем сканирования последовательных кадров со светочувствительного датчика, во время которых первый и второй источники света включаются попеременно.
Первый и второй источники света стробируются во время связанных кадров сканирования на растровом матричном датчике. В некоторых вариантах реализации изобретения первый источник света стробируется в конце первого кадра сканирования, а второй источник света стробируется в начале второго кадра сканирования, что минимизирует влияние перемещения тары между кадрами. В других вариантах реализации изобретения осуществляется управление интегрированием световой энергии на отдельном элементе изображения (пикселе) датчика во время сканирования кадров для минимизации влияния постороннего света. Первый источник света стробируется в конце первого кадра, а второй источник света может стробироваться в конце второго кадра для минимизации влияния постороннего света. Альтернативно второй источник света может быть стробирован в начале второго кадра для минимизации влияния перемещения тары, а пиксельные данные могут быть синхронизированы при выводе со светочувствительного датчика во время второго кадра так, чтобы влияние постороннего света было "смазано" во время второго кадра изображения. Воздействие такого смазанного окружающего света может быть минимизировано путем использования так называемой техники детектирования величины контуров изображения для получения двухмерного изображения второго кадра сканирования как функции сравнения одних и тех же сигналов пиксельных элементов изображения между соседними сканированными строками.
Способ проверки тары на отклонения, которые влияют на промышленную приемлемость тары, в соответствии с другим аспектом этого изобретения включает этапы попеременного направления первой и второй световых энергий разного типа на часть тары, получения первого и второго двухмерных изображений части тары во время освещения первой и второй световыми энергиями соответственно и определения промышленных отклонений в таре, которые влияют на оптические свойства тары, путем сравнения первого и второго изображений. Первая и вторая световые энергии предпочтительно направляются попеременно на единственный растровый матричный светочувствительный датчик для формирования двухмерного изображения освещенной части тары и сканирования этих двухмерных изображений с датчика. Двухмерные изображения сравниваются для определения промышленных отклонений на таре путем наложения изображений предпочтительно путем использования одного из изображений для предположения зон возможного возникновения отклонений в других изображениях.
В предпочтительных вариантах этого аспекта изобретения первое и второе двухмерные изображения освещенной части тары получаются путем управления светочувствительным датчиком в последовательных кадрах сканирования равной длительности, направляя первую и вторую световую энергию на тару во время последовательных первого и второго связанных кадров сканирования на датчике, и сканируя датчик во время первого и второго кадров сканирования, для получения желаемого двухмерного изображения освещенной части тары. Наиболее предпочтительно первый источник света стробируется для направления световой энергии на тару и датчик в течение малой части первого кадра сканирования, а второй источник света стробируется для направления световой энергии на тару и датчик в течение малой части второго кадра сканирования. Первый источник света предпочтительно стробируется в конце каждого первого кадра, а второй источник света может стробироваться либо в начале, либо в конце каждого второго кадра сканирования в зависимости от используемых устройств управления кадром и сканирования. Время интегрирования первого кадра может быть ограничено коротким временем стробирования первого источника света, ограничивая этим интегрирование постороннего света в первом кадре. Наиболее предпочтительно второй источник света стробируется в начале каждого второго кадра сканирования, и датчик управляется так, чтобы интегрировать световую энергию от второго источника света в течение всего второго кадра сканирования. Светочувствительный датчик сканируется в течение второго кадра сканирования по строкам элементов изображения в датчике, так что влияние постороннего света во время сканирования второго кадра смазывается в последовательных строках пикселей, сканируемых с датчика. При использовании техники детектирования величины контуров изображения, в которой сигнал каждого пикселя в каждой строке, сканированной с датчика, сравнивается с сигналом того же пикселя со следующей строки, сканированной с датчика, влияние сглаживания постороннего света минимизировано.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Это изобретение вместе с его дополнительными задачами, особенностями и преимуществами будет лучше понято из последующего описания, прилагаемых пунктов заявки и сопровождающих чертежей, в которых:
фиг. 1 - это блок-схема аппаратуры для проверки герметизирующей поверхности тары в соответствии с одним настоящим предпочтительным вариантом реализации этого изобретения;
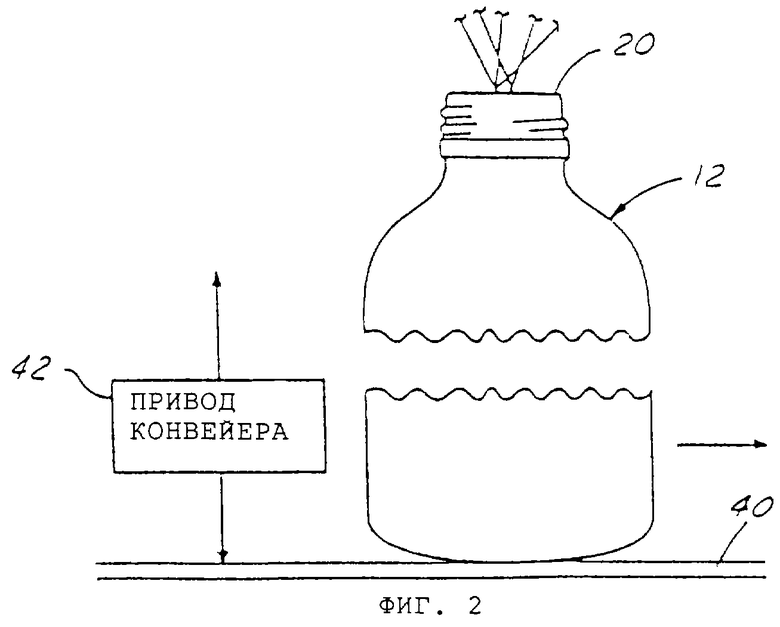
фиг. 2 - это фрагмент блок-схемы, иллюстрирующей модификацию варианта фиг.1;
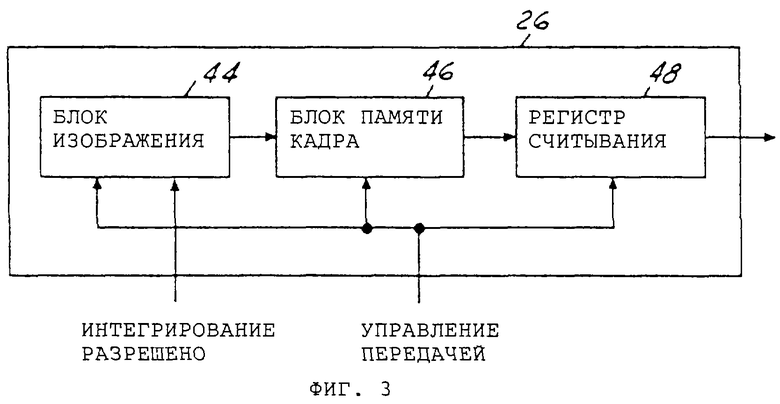
фиг. 3 - это функциональная блок-схема датчика ПЭС передачи кадра, который может быть использован в камере, представленной на фиг.1;
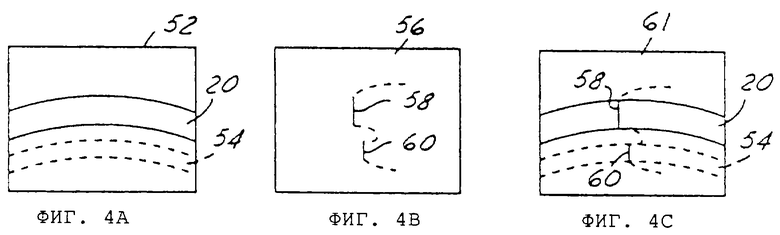
фиг. 4А, 4В и 4С иллюстрируют соответствующие двухмерные изображения контролируемой тары и полезны при описании этого изобретения;
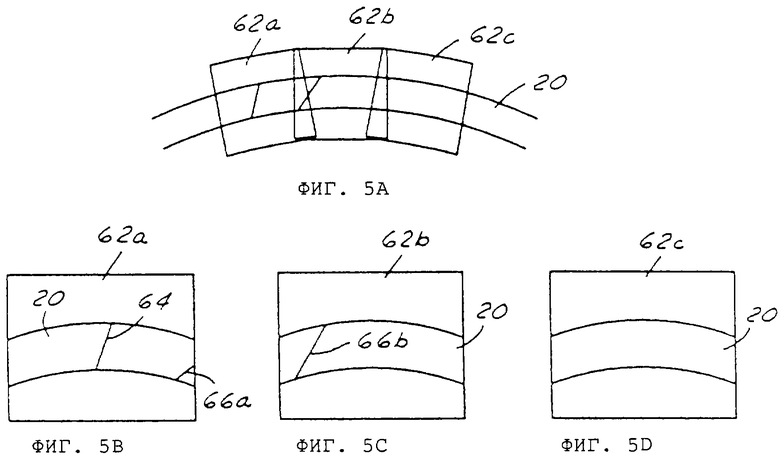
фиг. 5А, 5В, 5С и 5D иллюстрируют соответствующие двухмерные изображения контролируемой части тары, представленной на фиг.1, и полезны в описании действия этого изобретения; и
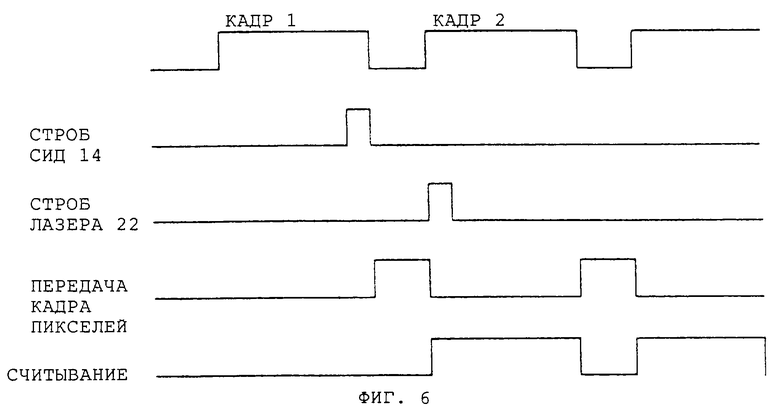
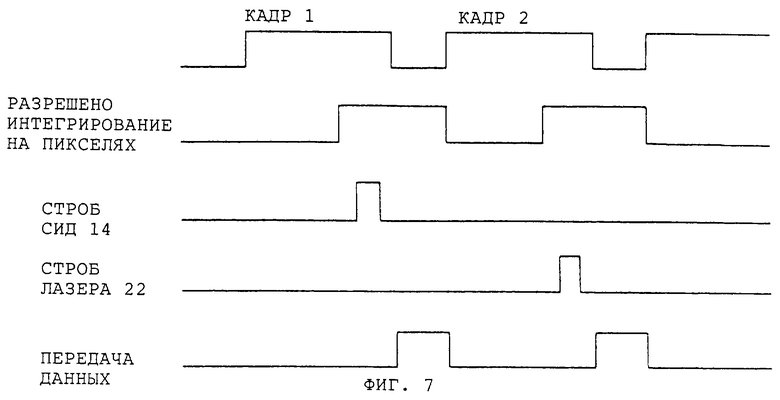
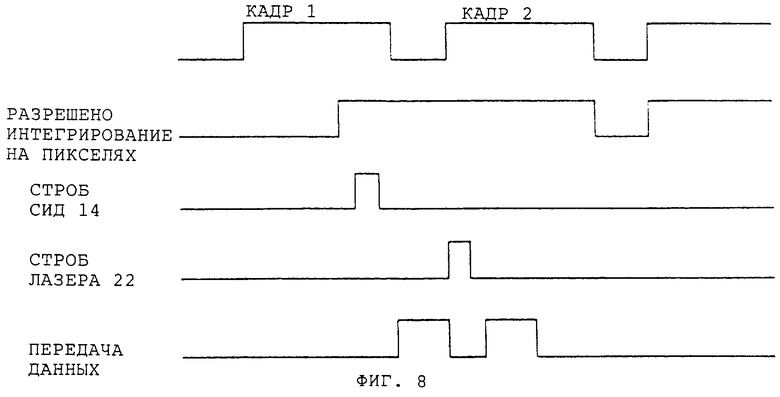
фиг. 6, 7 и 8 - это временные диаграммы, которые иллюстрируют сканирование камеры, представленной на фиг.1, в соответствии с соответствующими вариантами этого изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ
Описание вышеупомянутой одновременно рассматриваемой заявки США 08/856829 включено в это описание в виде ссылки. Описание вышеупомянутого патента США 4958223 включено в это описание в виде ссылки.
Фиг. 1 иллюстрирует устройство 10 для контроля тары 12 в соответствии с одним предпочтительным вариантом этого изобретения. Первый источник света 14, такой как светоизлучающий диод СИД излучатель 16, размещен над контейнером 12 и ориентирован так, чтобы направлять световую энергию через рассеиватель света 17 и набор линз Френеля 18 вниз на герметизирующую поверхность 20 тары 12. Второй источник света 22, такой как лазер, также размещен над тарой 12 и ориентирован так, чтобы направить узкий линейный световой луч вниз на герметизирующую поверхность 20 на место, совпадающее со световым лучом от СИД 16. Рассеянный свет от СИД источника света 14 освещает всю радиальную и часть окружной поверхности герметизирующей поверхности, в то время как прямолинейный луч света от лазерного источника света 22 ориентирован продольно или радиально к герметизирующей поверхности. Камера 24 содержит датчик в виде растровой матрицы 26, на который линзами 27, 28 фокусируется световая энергия, отраженная от герметизирующей поверхности 20. Камера 24 размещена над герметизирующей поверхностью 20 и ориентирована для приема световой энергии, отраженной герметизирующей поверхностью от СИД источника света 14. То есть камера 24 и датчик 26 ориентированы относительно СИД источника света 14 так, чтобы световая энергия от СИД 16 нормально отражалась герметизирующей поверхностью 20 в номинальном плоском положении герметизирующей поверхности через линзы 27, 28 на датчик 26. С другой стороны, лазерный источник света 22 ориентирован под более острым углом к герметизирующей поверхности 20, так что световая энергия, падающая от него на герметизирующую поверхность 20, отражается на датчик 26 через линзы 28, 29, зеркало 31 и расщепитель луча 33, расположенный между линзами 27, 28.
Конвейер, обычно включающий звездочку и скользящую плиту, расположен и подсоединен к источнику подачи тары 12 так, для последовательного перемещения тары через закругленный тракт и подачи последовательной тары к устройству 10 между источниками света 14, 22 и камерой 24. Устройство 10 предпочтительно размещено на одной позиции звездочного конвейера системы контроля тары, описанного в патентах США 4230319 и 4378493, описания которых включены сюда в виде ссылок для целей описания предшествующего уровня техники. Последовательная тара 12 таким образом размещается стационарно под источниками света 14, 22 и камерой 24, и вращается ведущим роликом 30 или подобным устройством вокруг центральной оси каждой тары. Кодирующее устройство 32 соединено с механизмом вращения тары для формирования сигналов, характеризующих приращения вращения тары. Такие приращения могут содержать либо фиксированные угловые приращения вращения, либо фиксированные временные приращения поворота с постоянной скоростью. Устройство обработки информации 34 подсоединено к кодирующему устройству 32, камере 24 и источникам света 14, 22 для управления работой источников света и сканированием камеры 24, как будет описано. Устройство обработки информации 34 также соединено с дисплеем 36 для формирования алфавитно-цифрового или графического отображения информации о контроле тары оператору, и к механизму отбраковки 38 для удаления с системы конвейера тары, не прошедшей проверку.
Вариант реализации этого изобретения, показанный на фиг.1, особенно хорошо приспособлен для использования у так называемого холодного конца системы производства стекла, после того как тара прошла через отжиговую печь, и тара достаточно охладилась для обработки звездочным конвейером и ведущим роликом. Принципы этого изобретения могут быть также применены на так называемом горячем конце системы производства между машиной для производства стекла и обжиговой печью. Стеклянная тара, изготовленная в индивидуальной секционной машине, например, передается на линейный конвейер 40 (фиг.2), на котором тара перемещается напрямую от производящей машины к обжиговой печи. Конвейер 40 соединен с механизмом привода конвейера 42, который может подавать к устройству обработки информации 34 (фиг.1) сигналы, показывающие приращения движения тары на конвейере. Устройство 10 на фиг.1 может быть размещено над конвейером 40 так, чтобы тара 12 на конвейере 40 проходила под источниками света и камерой для контроля герметизирующей поверхности тары, как будет описано. В этом варианте реализации камера может сканироваться с приращениями движения линейного конвейера, поперечного оси тары. Известно множество операций сканирования камеры, которые могут быть выполнены в устройствах, в которых тара скорее поступательно перемещается, чем вращается под источниками света. Например, может быть использована камера с высокой разрешающей способностью, чтобы получить пару изображений полной отделки. Может быть использован прямоугольный растровый матричный датчик для получения множества "срезов" отделки по мере того, как она проходит под проверяющей головкой. Может быть использована камера с низкой разрешающей способностью совместно с сервоприводными зеркалами для обзора полной окружности отделки, по мере того как тара проходит под проверяющей головкой. Тара помещается на конвейер 40 машиной по производству в предварительно определенной и непрерывной последовательности согласно машинной отливки и отрезанию. Устройство обработки информации 34 может формировать информацию, показывающую промышленные отклонения на герметизирующей поверхности тары и/или автоматически выполнять регулировку или корректировку машины по производству тары, чтобы исправить любые замеченные промышленные отклонения.
Растровый матричный датчик 26 камеры 24 содержит множество элементов изображения ПЗС, или пикселей, расположенных в прямоугольной матрице по рядам и столбцам. Элементы пикселей отличаются тем, что они реагируют на падающую световую энергию для формирования электрического сигнала, указывающего общий квант световой энергии, падающей на пиксельный элемент. Другими словами, при разрешении действовать, каждый пиксельный элемент эффективно интегрирует количество световой энергии, падающей на него. Датчик в соответствии с настоящим изобретением предпочтительно содержит ПЗС-датчик передачи кадра. В общем, этот тип растрового матричного датчика ПЗС содержит блок изображения, включающий множество пиксельных элементов, блок памяти, в которую могут передаваться сигналы пиксельных элементов, и регистр считывания, через который сигналы пиксельных элементов в блоке памяти передаются для передачи из датчика. Фиг.3 представляет датчик передачи кадра 26, который включает блок изображения 44, содержащий матрицу пиксельных элементов. Блок изображения 44 подсоединен к блоку памяти кадра 46, который в свою очередь подсоединен к считывающему регистру 48 для передачи данных изображения к устройству обработки информации 34 (фиг.1). Сигналы управления от устройства обработки информации 34 для управления работой датчика 26 включают входной сигнал разрешения интегрирования в блок изображения 44 и входные сигналы управления передачей в блок изображения 44, блок памяти кадра 46 и считывающему регистру 48. В общем, датчик передачи кадра 26 передает одну строку кадра за один раз. Таким образом, строка или ряд сигналов пикселей передается от блока изображения 44 к блоку памяти кадра 46, в то время как строка или ряд сигналов в блоке памяти кадра 46 передаются к регистру считывания. Этот процесс продолжается до тех пор, пока не будет передан весь кадр. Сам по себе датчик передачи кадра 26 хорошо известен в технике.
В общем, устройство обработки информации 34 (фиг.1) попеременно подает напряжение на СИД источник света 14 и лазерный источник света 20 и сканирует связанные двухмерные изображения герметизирующей поверхности тары с растрового матричного датчика 26 камеры 24. Путем сравнения изображения на камере с СИД источника света 14 и с лазерного источника света 22 может быть получена полезная информация. Например, ссылаясь на фиг.4А-4С, устройство обработки информации 34 может получить с камеры 24 двухмерное изображение 52 сегмента герметизирующей поверхности 20, освещенной СИД источником света 14. Используя это изображение 52, устройство обработки информации 34 определяет положение герметизирующей поверхности 20 и предсказывает положение 54 для любой линейной грани или сжатия, которые могут быть расположены в зоне следующего шага внутри герметизирующей поверхности. Устройство обработки информации 34 затем анализирует изображение 56, сканированное с датчика 26 во время освещения лазерным источником света 22, из которого отмечаются две зоны отражения 58, 60. Отражение 58 происходит от верхней части герметизирующей поверхности 20, в то время как отражение 60 происходит от зоны следующего шага, расположенной радиально непосредственно внутри герметизирующей поверхности. Путем аналитического наложения изображений 52, 56 и создания, таким образом, сложного изображения 62, устройство обработки информации 34 может определить, что отражение 58 связано с герметизирующей поверхностью 20, в то время как отражение 60 находится в зоне следующего шага 54, в которой может ожидаться линейная грань или излишнее сжатие. Таким образом, отражение 60, находящееся внутри зоны линейной грани или излишнего сжатия 54, может быть сравнено по месту относительно отражения 58 для определения имеет ли линейная грань достаточную высоту, чтобы создать условия излишнего сжатия, требующие удаления этой тары, а также возможное действие по исправлению исходного изделия в отливочной машине. Это сравнение может быть выполнено автоматически в устройстве обработки информации 34 посредством поэлементного сравнения изображений 52, 56, или может быть выполнено оператором вручную на дисплее 36, на котором отображается изображение 62.
Фиг. 5А-5D иллюстрируют три последовательных составных изображения 62а, 62b, 62с относительно герметизирующей поверхности тары 20. То есть устройство обработки информации 34 (фиг.1) подает напряжение на каждый источник света 14, 22 и сканирует датчик 26 по мере того, как включается каждый источник света, чтобы получить составное изображение 62 при каждом приращении вращения тары. Фиг.5А-5D иллюстрируют три таких составных изображения 62а, 62b, 62с при трех приращениях вращения тары. В каждом изображении герметизирующая поверхность 20 ясно показана как освещенная СИД источником света 14. В изображении 62а в позиции 64 показано отклонение складки в отделке, а второе такое отклонение показано в позиции 66а. Однако, поскольку изображение 62а захватывает только часть складки в отделке 66а, это отклонение может быть не замечено или проигнорировано при обработке изображения. Полное отклонение типа складки в отделке показано в точке 66b. Таким образом, путем управления работой источников света 14, 22 и сканированием камеры 24 так, чтобы получить перекрывающиеся изображения 62а, 62b, 62с, определяется отклонение типа складки в отделке, которая иначе была бы не замечена, потому что она находится рядом с границей между последовательными кадрами. Другие источники света, такие как составной СИД, могут быть использованы совместно с источниками света 14, 22, как описано в вышеописанной сопутствующей заявке.
Таким образом, чтобы получить два различных изображения от двух источников света, один источник света освещает тару по время одного кадра камеры, а другой источник света освещает тару во время следующего кадра камеры. Кадры изображения камеры имеют одинаковую длительность по времени. Эта последовательность повторяется по мере того, как тара вращается (фиг.1) или поступательно перемещается (фиг.2). Данные элементов изображения, накопленные в датчике камеры, могут быть загружены из матрицы пикселей, после чего отдельные пиксели могут обобщать новые данные изображения. Обычный способ получения двух последовательных изображений одной камерой состоит в стробировании двух источников света в двух соседних кадрах камеры, и поэтому восприятие этих двух изображений будет разделено одним временем кадра. В высокоскоростном растровом матричном датчике 128х128 камера может быть синхронизирована на частоте 16 МГц, так что время, выделенное на каждый кадр, будет равно 1 мс. Для проверочной машины, работающей со скоростью 360 бутылок в минуту (с использованием 50% времени для проверки и поворота каждой бутылки 1,5 раза за период проверки), и при бутылках, имеющих конец диаметром в один дюйм, конец будет вращаться со скоростью около 0,060 дюйма в 1 мс. Если обработка бутылки меньше оптимальной, и бутылка движется в радиальном направлении на одну часть при двух частях движения по окружности на коротком расстоянии, тогда конец будет перемещаться радиально на 0,030 дюйма за каждую 1 мс времени кадра. Это может легко сместить отражение герметизирующей поверхности 58 (фиг. 4В и 4С) в зону линейной грани 54, например, вызывая ложное детектирование линейной грани или избыточного сжатия. Более того, прием и интегрирование окружающего света за 1 мс кадрового времени даст нежелательное отношение сигнал - шум камеры. Предпочтительно стробировать источники света 14, 22 в течение очень короткого промежутка времени, такого как порядка 15 микросекунд. За это время тара повернется только на примерно 0,001 дюйма, что уменьшит пятно от движения. Более того, время интегрирования может быть ограничено до 15 микросекунд длительности стробирования каждого источника света.
Фиг. 6 показывает один источник света и технику управления сканированием кадра, которая может быть применена. СИД источник света 14 стробируется в конце кадра 1, а лазерный источник света 22 стробируется в начале кадра 2. Данные пикселей передаются от блока изображения к блоку памяти во время межкадровых периодов и выгружаются из регистра считывания датчика к устройству обработки изображения во время следующего кадра. (Следует принять во внимание, конечно, что "кадр 1" и "кадр 2" на фиг.6 и фиг.7-8 постоянно чередуются во время работы. Так, кадр 1 и кадр 2 на фиг.6 могут быть связаны с составным изображением 62а на фиг.5А, например. Следующая последовательность кадр 1 - кадр 2 затем будет связана с составным изображением 62b и т.п.. Путем стробирования СИД источника света 14 в конце кадра 1, а лазерного источника света 22 в начале кадра 2,задержка по времени между освещениями источниками света минимизирована, так что контейнер не будет значительно перемещен между периодами получения двухмерных изображений, связанных с кадрами 1 и 2. Такая технология минимизирует проблему перемещения тары между сканированиями кадров, но не решает проблемы окружающего света, падающего на датчики камеры. Пиксели в датчике 26 будут принимать и интегрировать посторонний свет во время всей длительности обоих кадров 1 и 2 на фиг.6, и данные, связанные с окружающим светом, будут передаваться к устройству обработки изображения.
Фиг. 7 и 8 иллюстрируют технологии управления источником света и сканирования кадра, которые используют возможность, доступную на многих растровых матричных датчиках, позволить интегрирование на индивидуальных элементах изображения через сигнал управления разрешением интегрирования от устройства обработки информации 34. Таким образом, элементам изображения в матрице датчика будет разрешено интегрировать падающий на них свет во время длительности разрешающего сигнала, но они должны передать данные во время разрешающего сигнала, или данные пикселей будут потеряны. Когда разрешения нет, пиксели надежно заземлены. Фиг.7 иллюстрирует одну технологию использования этой особенности. Интегрирование пикселями разрешено в конце кадра 1 и в конце кадра 2. СИД источник света 14 стробируется в конце кадра 1, а лазерный источник света 22 стробируется в конце кадра 2. Данные пикселей передаются во время межкадровых периодов непосредственно следующих друг за другом кадров 1 и 2 и загружаются через регистр считывания во время периода последующего кадра. Технология, показанная на фиг.7, эффективно решает проблему окружающего света, падающего на пиксели, путем разрешения интегрирования на элементах изображения только во время, когда связанные источники света стробируются. Однако будет иметь место значительное перемещение проверяемой зоны тары между периодами сканирования изображения в концах кадров 1 и 2.
Фиг. 8 иллюстрирует источник света и устройство управления сканированием кадра, которая здесь предпочтительна. Интегрирование данных пикселей разрешено в конце кадра 1, во время которого СИД источник света 14 стробируется, как описано ранее. Данные пикселей затем загружаются во время межкадрового периода между кадром 1 и кадром 2. Интегрирование окружающего света во время кадра 1 этим минимизируется. Интегрирование данных пикселей снова разрешается с началом кадра 2, и лазерный источник света 22 стробируется в начале кадра 2. Это минимизирует эффект движения контейнера между временами стробирования источников света. В этот момент оба изображения от источника 14 и источника 22 полностью находятся на датчике 26 в одно и то же время. Передача данных начинается сразу же после того, как лазерный источник света стробируется. Однако интегрирование должно оставаться разрешенным на период передачи данных от блока изображения 44 к блоку записи 46 или 50 (фиг.3А и 3В), так что эти данные не будут потеряны. Это позволяет некоторому количеству окружающего света войти в кадр 2 во время, когда данные элемента изображения считываются с растрового матричного датчика. Таким образом, данные (с кадра 1) снимаются с блока изображения датчика в то же время, когда данные (из кадра 2) считываются с регистра считывания. Блок изображения датчика будет продолжать интегрировать свет до тех пор, пока они не будут считаны в секцию записи. Первая строка, считанная в блоке записи, будет иметь очень короткое время интегрирования. Однако последняя строка, записанная в секцию записи, будет иметь полный кадр времени интегрирования окружающего света. Это имеет эффект расширения или "размазывания" окружающего света на полный кадр. Последняя строка данных изображения интегрирует с самого начала изображения и продолжает интегрировать окружающий свет по мере того, как данные передаются по одной строке за один раз в секции изображения матрицы. Строка данных перемещается через блок изображения матрицы в течение времени интегрирования. Строка данных интегрирует различный окружающий свет в каждой точке изображения, и поэтому эффективно "загрязняет" изображение окружающего света. Изображение от стробируемого источника света не загрязняется. Теоретически это увеличивает интегрирование окружающего света в среднем на коэффициент два. Однако практически окружающий свет, когда камера направлена на тару, неравномерен по всему изображению. Если окружающий свет помещен в центре кадра и имеет величину в одну десятую полной амплитуды, тогда любая строка пикселей самое большее будет перед этим изображением окружающего света на матрице в течение только одной десятой общего времени кадра, уменьшая максимальную амплитуду на коэффициент десять. Таким образом, окружающий свет эффективно равен нулю на первой строке, сканированной с блока изображения, и имеет полную одну десятую амплитуды на последней строке, сканированной с блока изображения. Для визуализации каждого сканированного изображения предпочтительно использовать технологию детектирования величины контуров изображения. Эта технология включает сравнение данных каждого элемента изображения каждой строки с данными от соответствующего пикселя в предыдущей строке, и ввод данных изображения как функции разницы между ними. Может быть установлен предел сравнения, чтобы приспособиться к "загрязнению" окружающим светом, так что только действительный контур изображения будет детектирован. Это управление светом и технология сканирования кадра дает преимущество архитектуры обычно доступных и недорогих ПЗС-датчиков и камер, хотя логика синхронизации в камере должна быть модифицирована, как было описано.
Устройство контроля тары 12 содержит первый источник света 14 для генерации световой энергии первого вида и направления этой световой энергии от первого источника на предварительно определенную часть 20 проверяемой тары и второй источник света 22 для генерации световой энергии второго вида, отличающейся от первого вида, и направления этой световой энергии на ту же предварительно определенную часть тары. Растровый матричный светочувствительный датчик 26 расположен так, чтобы принимать двухмерное изображение части тары, освещенной первым и вторым источниками света. Первый и второй источники света последовательно и попеременно стробируются, и первое и второе двухмерные изображения части проверяемой тары загружаются с приемника. Промышленные отклонения, влияющие на оптические свойства тары, определяются путем сравнения первого и второго двухмерных изображений от соответствующих источников света, сканируемых со светочувствительного датчика. Светочувствительный датчик включает блоки 44, 46, 48 для сканирования двухмерных изображений в последовательные кадры, и первое и второе изображения получаются путем сканирования последовательных кадров с датчика, во время которого первый и второй источники света попеременно стробируются. Технический результат - минимизация воздействия как движения тары, так и окружающего света. 2 с. и 25 з. п. ф-лы, 8 ил.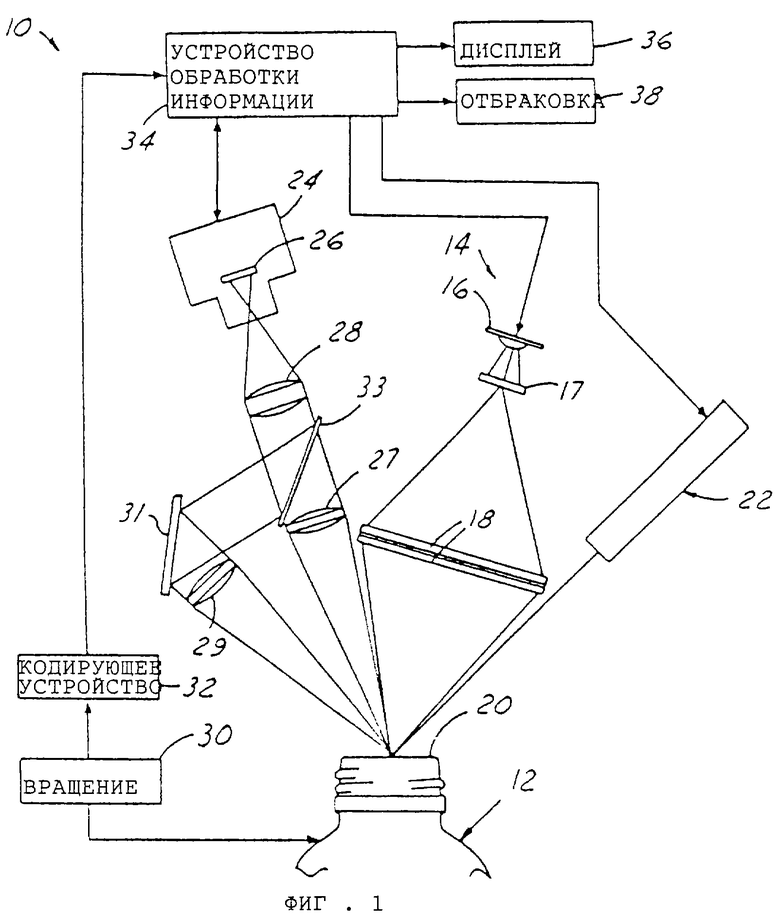
(а) попеременно направляют первый и второй световые энергии различного вида на часть (20) тары,
(b) получают первое и второе двухмерные изображения части тары, освещенной в упомянутом этапе (а) во время освещения упомянутыми первой и второй световыми энергиями соответственно, и
(c) детектируют промышленные отклонения на таре, влияющие на оптические свойства тары, путем сравнения упомянутых первого и второго изображений по отношению друг к другу, в котором упомянутый этап (b) содержит следующие действия: (b1) направляют упомянутые первую и вторую световые энергии попеременно на один растровый матричный светочувствительный датчик (26) для создания двухмерных изображений освещенной части тары на упомянутом датчике и (b2) сканируют упомянутые двухмерные изображения с упомянутого датчика, в котором упомянутый этап (с) содержит этап сравнения упомянутых двухмерных изображений по отношению друг к другу, связанных с упомянутыми первой и второй световыми энергиями.
(b3), в котором управляют накоплением световой энергии на пикселях в течение, по меньшей мере, одного из упомянутых первых и вторых кадров для уменьшения влияния окружающего света во время накопления световой энергии на пикселях.
| US 5489987 А, 6.02.1996 | |||
| Тепловой расходомер | 1974 |
|
SU497477A2 |
| ЕР 0388600 А2, 30.01.1990 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА ПЕРЕМЕЩАЕМЫХ ПО КРУГОВОЙ ТРАЕКТОРИИ ПОЛЫХ ИЗДЕЛИЙ | 1990 |
|
RU2009474C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО К АВТОМАТАМ ДЛЯ ОТБРАКОВКИ ДВИЖУЩИХСЯ БУТЫЛОК С ЖИДКОСТЬЮ, СОДЕРЖАЩЕЙ НЕРАСТВОРИМЫЕ ЧАСТИЦЫ | 0 |
|
SU244642A1 |

