Изобретение относится к медицинской технике, а именно к кроватям, которые используются в различных медицинских, лечебно-профилактических учреждениях, в быту, в домах престарелых и инвалидов.
Известна медицинская кровать госпитальная качающаяся [1].
Недостатком данной кровати является необеспечение свободного вращения больного относительно горизонтальных осей.
Наиболее близким по технической сущности и достигаемому результату является кровать медицинская, содержащая неподвижное основание, поворотный привод и ложе, которое может вращаться относительно продольной и поперечной осей [2].
Недостаток прототипа состоит в том, что данная кровать обладает ограниченными функциональными возможностями: изменение положения ложа относительно осей не может меняться в автоматическом режиме с заданными и регулируемыми скоростью, амплитудой и периодом колебаний (автоколебания), что не обеспечивает оптимальных условий улучшения кровообращения всего организма.
Цель изобретения - расширение функциональных возможностей кровати путем обеспечения автоколебания плоскости ложа относительно поперечной горизонтальной оси основания с регулируемыми скоростью, амплитудой и периодом колебаний, что существенно увеличивает гравитационную составляющую кровотока. Значимой и оптимальной эта составляющая становится лишь при вращении ложа относительно поперечной горизонтальной оси вращения и определенных скорости, амплитуде и периоде колебаний, которые зависят от индивидуальных особенностей человека.
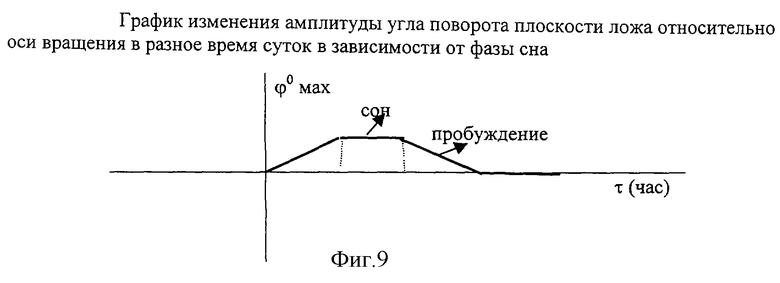
Указанный технический результат достигается за счет того, что кровать медицинская содержит неподвижное основание, ложе и привод, причем ложе закреплено на основании с помощью соединения, обеспечивающего вращение всей плоскости ложа относительно поперечной горизонтальной оси основания в вертикальной плоскости. В привод введен блок автоколебаний, обеспечивающий непрерывное автоматическое качание ложа кровати с изменяющимися в процессе качания амплитудой, угловой скоростью и периодом колебаний. Изменение скорости угла поворота ложа кровати относительно оси вращения в течение одного периода колебаний может осуществляться по линейному, криволинейному, синусоидальному и трапецеидальному законам, а изменение амплитуды и периода колебаний в разное время суток зависит от фазы сна. Ось вращения ложа кровати расположена таким образом, что она проходит на уровне сердца в горизонтальном положении тела человека. Расположение оси вращения на уровне сердца обусловлено тем, что изменение амплитуды в этой точке минимально, а поскольку направление кровотока идет от сердца и к сердцу, то и нагрузка на сердце будет минимальной. Введение в привод блока автоколебаний позволяет непрерывно менять положение ложа и тела больного, что в свою очередь у лежачих больных препятствует возникновению таких осложнений, как онемение, отек, застой крови, образование пролежней, вследствие нарушения кровоснабжения, вызванного длительным неподвижным нахождением больного в лежачем положении, а также улучшает качество сна.
Таким образом: выполнение кровати, состоящей из неподвижного основания, ложа и привода с блоком автоколебаний, которые обеспечивают непрерывное вращение ложа относительно поперечной горизонтальной оси кровати, проходящей на уровне сердца в горизонтальном положении больного, с изменяемыми амплитудой, скоростью и периодом колебаний, является новым для кровати, что соответствует критерию "новизна".
Вышеперечисленная совокупность отличительных признаков не известна из уровня техники на данный момент и не следует из общеизвестных правил конструирования кроватей, и это доказывает соответствие критерию "изобретательский уровень".
Конструктивная реализация кровати медицинской с указанной совокупностью существенных признаков не представляет никаких конструктивно-технических, технологических трудностей, что позволяет сделать вывод о соответствии критерию "промышленная применимость".
На фиг. 1 представлен общий вид кровати (угол поворота ложа кровати относительно оси равен нулю).
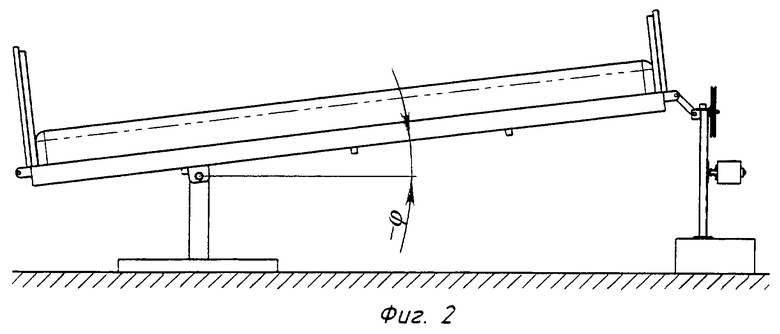
На фиг.2 представлен вариант рабочего положения - в момент опускания ложа (угол поворота ложа кровати относительно оси максимальный со знаком минус).
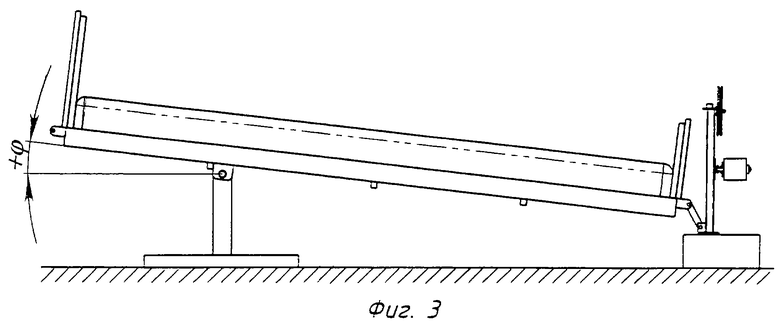
На фиг.3 представлен вариант рабочего положения - в момент подъема ложа (угол поворота ложа кровати относительно оси максимальный со знаком плюс).
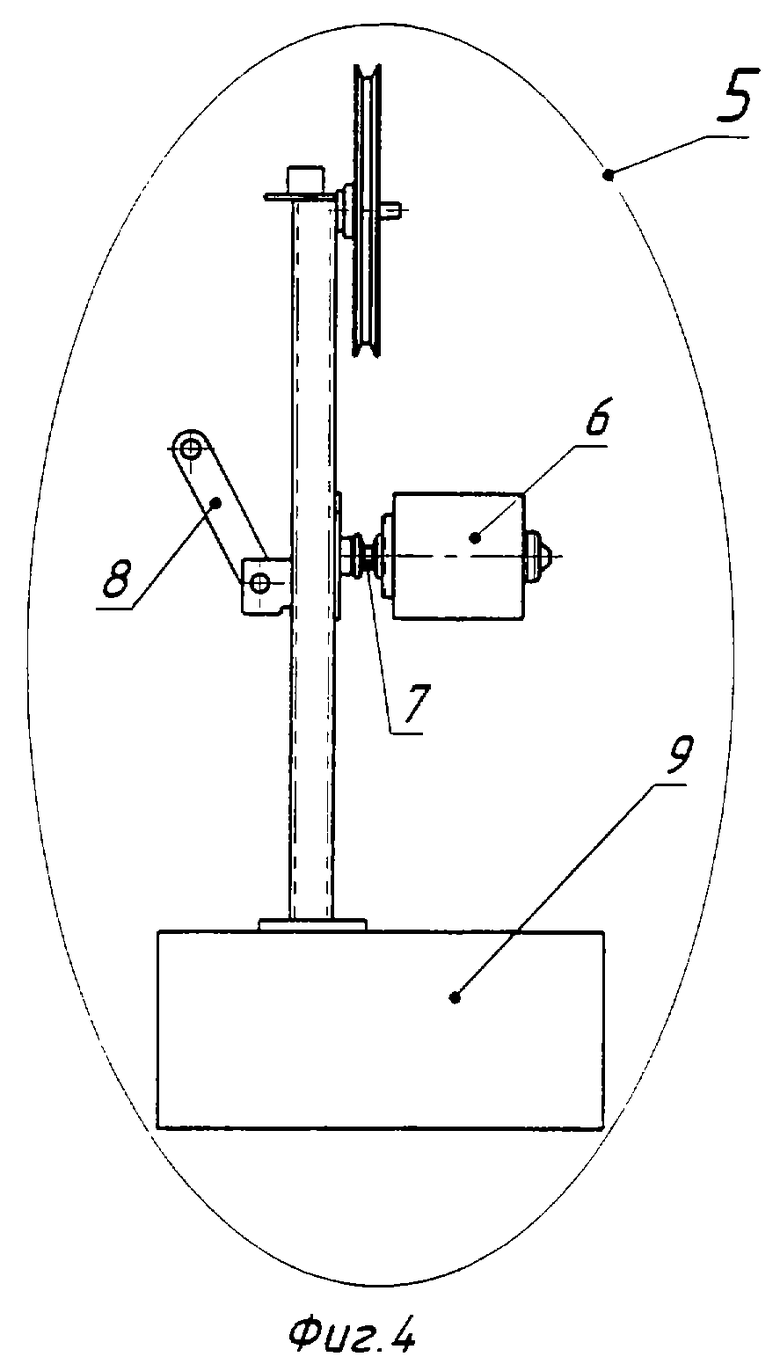
На фиг.4 представлена принципиальная схема устройства привода.
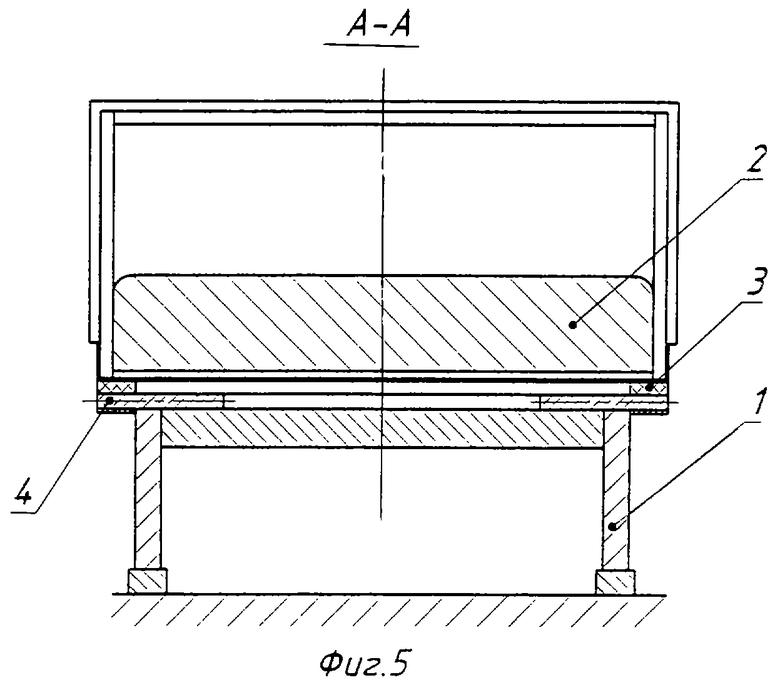
На фиг.5 представлена кровать в разрезе, вид по А-А.
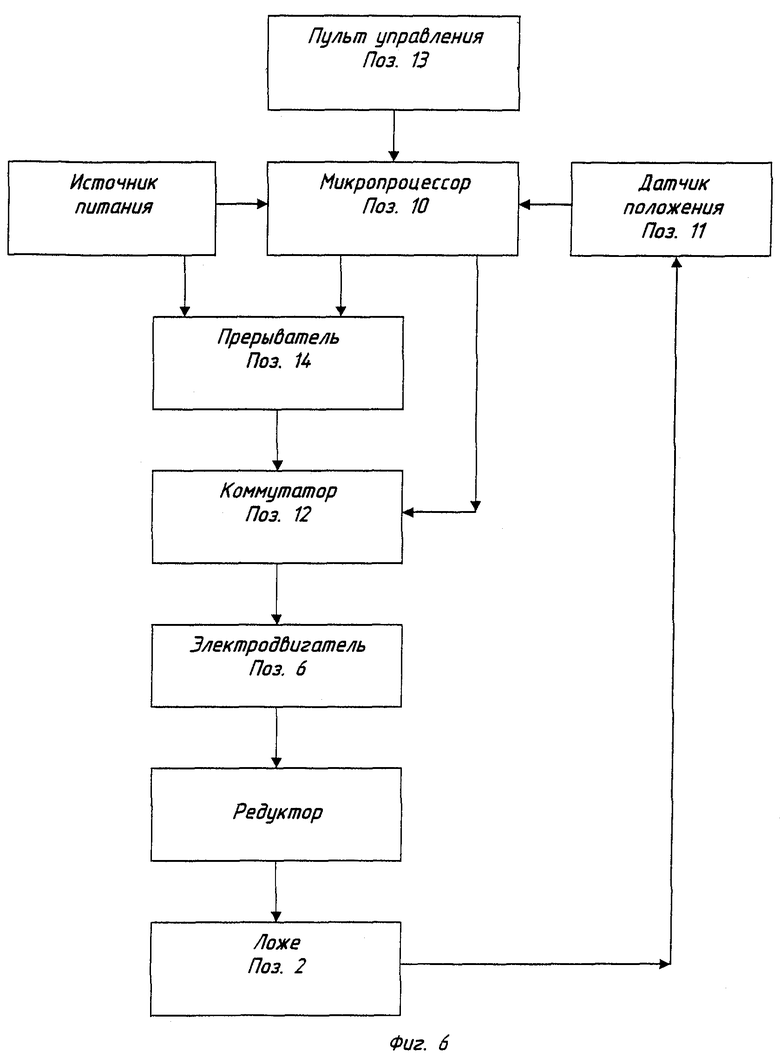
На фиг.6 представлена принципиальная схема управления кроватью.
На фиг.7-9 представлены графики, поясняющие работу кровати.
Кровать медицинская состоит (фиг.1) из неподвижного основания 1, ложа 2, которое закреплено на оси 3 с помощью соединения 4, обеспечивающего вращение всей плоскости ложа в вертикальной плоскости относительно поперечной горизонтальной оси, закрепленной жестко на основании, привода 5.
Привод (фиг.4) состоит из реверсивного электродвигателя 6, редуктора 7, шатуна 8, блока автоколебаний 9.
В блок автоколебаний входит (см. фиг.6) микропроцессор 10, угловой датчик положения ложа 11, коммутатор 12, пульт управления 13, прерыватель 14, перекидной переключатель 15.
Управление программой осуществляется микропроцессором 10. Управление скоростью, амплитудой и периодом колебаний осуществляется скважностью и полярностью включения электродвигателя. С помощью коммутатора 12 устанавливается направление движения ложа вверх или вниз.
Принцип работы кровати. Больного размещают на кровати. В зависимости от терапевтической задачи в памяти микропроцессора 10 задают таблицу скважности включения электродвигателя 6 и положение коммутатора 12, определяющего направление вращения электродвигателя для каждого дискретного интервала времени с учетом сигнала, поступающего с датчика положения, что и определяет полностью характеристики колебательного движения ложа. Для каждого требуемого закона изменения положения ложа задается своя таблица.
При запуске программы блока автоколебаний (см. фиг.6) микропроцессор 10 считывает сигнал с пульта управления 13 и с углового датчика положения 11 и посылает сигнал на прерыватель 14 и коммутатор 12. Сигнал с коммутатора 12 через перекидной переключатель 15 подается на электродвигатель 6, редуктор 7 и передаточное звено-шатун 8 начинает опускать ложе 2 кровати, за счет вращения соединения 4 на оси 3 неподвижного основания 1, вниз до заданного угла отклонения датчика положения 11. Достигнув заданного положения угла отклонения датчика положения 11, коммутатор 12, при переключении перекидного переключателя 15, меняет направление движения, и ложе 2 кровати начинает подниматься вверх до заданного значения угла отклонения датчика положения 11. Достигнув заданного угла отклонения датчика положения, коммутатор меняет движение в противоположную сторону хода, и ложе кровати начинает движение вниз и т. д. , таким образом, обеспечивается непрерывное качание ложа в автоматическом режиме. Управление механизмом кровати доступно для больного, при необходимости он может выбрать программу с помощью дистанционного пульта управления и вернуть кровать в исходное (горизонтальное) положение.
Изобретение по пп. 1, 2 формулы изобретения иллюстрируется следующим примером.
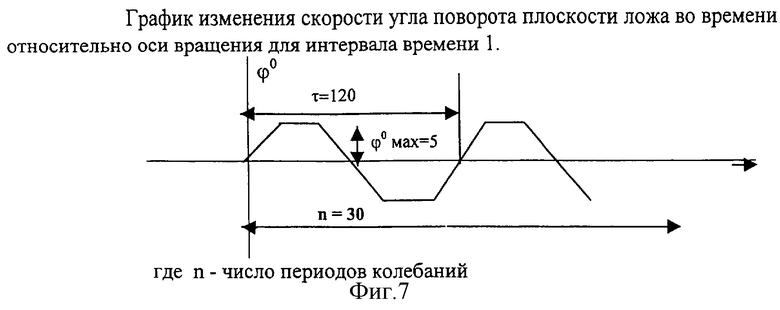
Интервал времени 1 (фаза засыпания) - 1 ч.
Амплитуда угла поворота - 5o.
Период колебаний - 120 с.
Закон изменения угла поворота в периоде Vϕ° - трапеция.
Скорость изменения угла поворота V1ϕ° = 0,25o/с и V2ϕ° = 0.
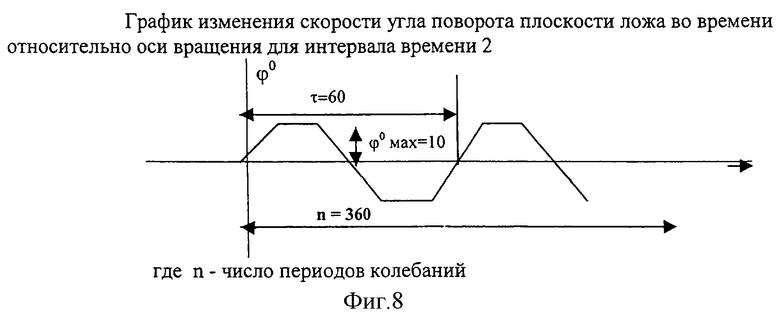
Интервал времени 2 (фаза сна) - 6 ч.
Амплитуда угла поворота ϕ°max = 10o.
Период колебаний τ = 60 c.
Закон изменения угла поворота в периоде - трапеция.
Скорость изменения угла поворота V1ϕ° = 1o/с и V2ϕ° = 0.
Использование настоящего изобретения позволяет расширить функциональные возможности медицинской кровати и существенно облегчить состояние и ускорить процесс лечения и выздоровления больных, которым изменение положения тела жизненно необходимо.
Источники информации
1. Заявка РФ 93030254, кл. 6 A 61 G 7/008, от 1993.06.17, опубл. 1995, БИ 32.
2. Патент RU 2186555, кл. 7 A 61 G 7/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕАБИЛИТАЦИОННАЯ КИНЕТИЧЕСКАЯ СИСТЕМА ДЛЯ ОБЕЗДВИЖЕННЫХ БОЛЬНЫХ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ | 2012 |
|
RU2490002C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2009 |
|
RU2464002C2 |
| Многофункциональная кровать | 2018 |
|
RU2692898C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2013 |
|
RU2538459C2 |
| Медицинская кровать | 2018 |
|
RU2692896C1 |
| Многофункциональная медицинская кровать | 2021 |
|
RU2753199C1 |
| ВИБРАЦИОННАЯ КРОВАТЬ | 2001 |
|
RU2215514C2 |
| Медицинская кровать | 1990 |
|
SU1799584A1 |
| ВИБРАЦИОННАЯ КРОВАТЬ ФАДЕЕВЫХ | 2005 |
|
RU2283639C1 |
| КРОВАТЬ МЕДИЦИНСКАЯ | 2008 |
|
RU2357716C1 |
Изобретение относится к медицинской технике, а именно к кроватям, которые используются в различных медицинских, лечебно-профилактических учреждениях, в быту, в домах престарелых и инвалидов. Кровать содержит неподвижное основание, ложе и привод. Ложе закреплено на основании с помощью соединения, обеспечивающего вращение всей плоскости ложа относительно основания в вертикальной плоскости. В привод введен блок автоколебаний, который обеспечивает непрерывное качание ложа кровати с изменяемыми амплитудой, скоростью и периодом колебаний. Изменение скорости угла поворота ложа относительно оси вращения в течение одного периода колебания осуществляют по линейному, криволинейному, синусоидальному или трапецеидальному законам. Ось вращения расположена на уровне сердца в горизонтальном положении тела человека. В результате расширяются функциональные возможности кровати путем обеспечения автоколебания плоскости ложа относительно поперечной горизонтальной оси основания с регулируемыми скоростью, амплитудой и периодом колебаний, что существенно увеличивает гравитационную составляющую кровотока. 1 з.п.ф-лы, 9 ил.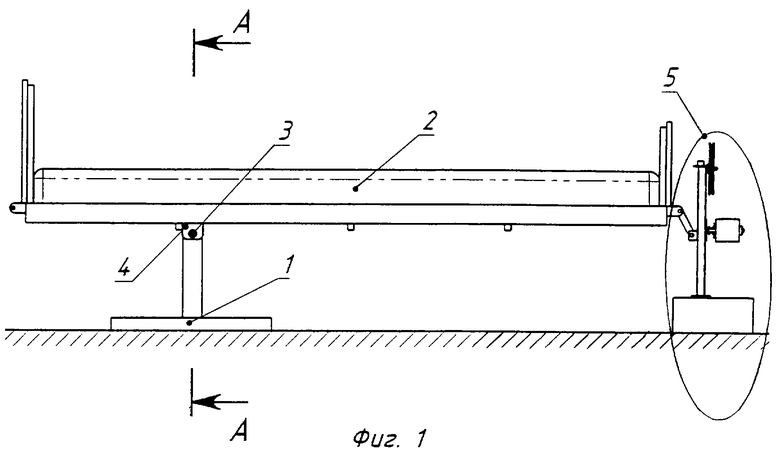
| КРОВАТЬ МЕДИЦИНСКАЯ | 2000 |
|
RU2186555C2 |
| US 5023967 А, 18.06.1991 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| DE 4115916 А, 12.12.1991. | |||

