Изобретение относится к медицинской технике, в частности к реабилитационным кроватям для размещения и обслуживания тяжелых больных и устройствам для их управления, и может быть использовано для круглосуточного обеспечения различных видов реабилитационных мероприятий обездвиженных больных.
Лечение больных, пострадавших и раненных с тяжелой сочетанной травмой, требует круглосуточного выполнения реабилитационных мероприятий по предотвращению пролежней, атонии, атрофии мышц, улучшению деятельности сердечно-сосудистой системы и улучшению микроциркуляции тканей путем позиционирования элементов кровати.
Известны функциональные, медицинские и реабилитационные кровати с регулируемыми секциями для поддержания тела пациента в необходимом положении (RU 87353 U1, МПК A61G 7/00, опубл. 10.10.2009; RU 2261695 С2, МПК A61G 7/00, опубл. 10.10.2005; RU 2231348 С1, МПК A61G 7/002, опубл. 27.06.2004; RU 2224493 C1, МПК A61G 7/00, опубл. 27.02.2004; RU 2026660 C1, МПК A61G 7/002, опубл. 20.01.1995).
Функциональная кровать по патенту (RU 2026660 C1, МПК A61G 7/002, опубл. 20.01.1995) предназначена для размещения и обслуживания тяжелобольных и содержит основание со спинками, которое включает в себя раму на колесах с тормозами и связанное с ней ложе в виде трех подвижных секций с приводами их подъема и опускания. Каждый привод подъема и опускания выполнен в виде телескопически размещенных труб, имеющих возможность стопорения одна относительно другой посредством закрепленного во внутренней трубе конусообразного элемента, с конусной поверхностью которого имеют возможность контакта шарики установленной во внешней трубе обоймы, связанной через подпружиненную тягу, рычаг и тросик с органом управления.
Общими признаками известной кровати и заявляемой является наличие ложа в виде подвижных секций с приводами их подъема и опускания.
Кровать упрощает изменения положения подвижных секций в пространстве, однако не может быть использована для программного управления положением секций.
Известны варианты функциональной кровати с регулируемыми секциями для поддержания тела пациента в необходимом положении (RU 2261695 С2, МПК A61G 7/00, опубл. 10.10.2005). Согласно первому изобретению группы кровать содержит основание и установленную на нем раму, на которой смонтировано ложе, включающее спинную, тазобедренную, промежуточную и ножную секции. Тазобедренная секция соединена с рамой, а спинная и промежуточная имеют механизмы регулирования угла их наклона. Ножная секция снабжена, по меньшей мере, одним фиксатором ее углового положения относительно промежуточной секции. В результате расширяются функциональные возможности за счет обеспечения независимого регулирования положения ножной секции относительно промежуточной и обеспечивает повышение жесткости и надежности устройства. Согласно второму изобретению группы кровать содержит основание и установленную на нем раму с ложем, включающим, по меньшей мере, спинную секцию, и механизм регулирования высоты ложа. Механизм имеет линейный двигатель и, по меньшей мере, одну пару шарнирно соединенных между собой рычагов, у которой верхний конец одного рычага шарнирно соединен с рамой, а его нижний конец выполнен с возможностью вращения и перемещения в направляющей основания. Верхний конец другого рычага выполнен с возможностью вращения и перемещения в направляющей рамы, а его нижний конец шарнирно соединен с основанием. Корпус двигателя и его подвижная часть соединены соответственно с основанием и с верхним концом одного из рычагов шарнирами, расположенными со стороны спинной секции. В результате повышаются эксплуатационные качества устройства - жесткость, прочность и, как следствие, надежность. Согласно третьему изобретению группы кровать содержит основание, раму, ложе и механизм регулирования высоты и угла наклона ложа. Этот механизм имеет два линейных двигателя и одну пару рычагов. Нижние концы рычагов шарнирно соединены с основанием, верхний конец одного из рычагов шарнирно соединен с рамой, а верхний конец другого выполнен с возможностью вращения и перемещения в направляющей рамы. Корпусы двигателей шарнирно связаны с основанием, а их подвижные части соединены с соответствующими рычагами шарнирами, расположенными в верхней части рычагов. Это также повышает эксплуатационные качества устройства - жесткость, прочность и, как следствие, надежность устройства.
Общими признаками известной кровати с заявляемой является наличие основания рамы, на которой смонтировано ложе, включающее спинную, тазобедренную, промежуточную и ножную секции при этом тазобедренная секция соединена с рамой, а спинная и промежуточная имеют механизмы регулирования угла их наклона. Недостатком указанной кровати является отсутствие боковых наклонов ложа и движения стоп, а также невозможность программного управления положением секций, что снижает функциональные возможности кровати.
Медицинская кровать по патенту (RU 2224493 С1, МПК A61G 7/00, опубл. 27.02.2004) позволяет существенно облегчит состояние и ускорить процесс лечения и выздоровления больных, которым изменение положения тела жизненно необходимо. Кровать содержит неподвижное основание, ложе и привод. Ложе закреплено на основании с помощью соединения, обеспечивающего вращение всей плоскости ложа относительно основания в вертикальной плоскости. Привод состоит из реверсивного электродвигателя, редуктора, шатуна, блока автоколебаний. В блок автоколебаний входит микропроцессор, угловой датчик положения ложа, коммутатор, пульт управления, прерыватель, перекидной переключатель. Управление программой осуществляется микропроцессором. Управление скоростью, амплитудой и периодом колебаний осуществляется скважностью и полярностью включения электродвигателя. С помощью коммутатора устанавливается направление движения ложа вверх или вниз.
В привод введен блок автоколебаний, который обеспечивает непрерывное качание ложа кровати с изменяемыми амплитудой, скоростью и периодом колебаний. Изменение скорости угла поворота ложа относительно оси вращения в течение одного периода колебания осуществляют по линейному, криволинейному, синусоидальному или трапецеидальному законам. Ось вращения расположена на уровне сердца в горизонтальном положении тела человека. В результате расширяются функциональные возможности кровати путем обеспечения автоколебания плоскости ложа относительно поперечной горизонтальной оси основания с регулируемыми скоростью, амплитудой и периодом колебаний, что существенно увеличивает гравитационную составляющую кровотока.
Общими признаками известной кровати и заявляемой является наличие блока управления (автоколебаний). Кровать обеспечивает непрерывное качание в автоматическом режиме только ложа, что является недостатком данной кровати.
Патентом (RU 2231348 С1, МПК A61G 7/002, опубл. 27.06.2004) заявлена функциональная кровать, которая может быть использовано для круглосуточного обеспечения различных видов реабилитационного лечения лежащего на кровати пациента. Функциональная кровать содержит основание в виде рамы на колесах с тормозами, торцевые спинки и ложе в виде подвижных секций с приводами их подъема и опускания. Кровать снабжена панелью туловища, которая расположена между рамой и ложем. Ложе составлено из спинной панели, головной панели, бедренной панели, панели голеней и панели стоп. Каждая панель выполнена в виде раскрывающихся створок с пневматическим приводом их подъема и опускания. Кровать обеспечивает программно-управляемое изменение положения туловища, спины, головы, бедер, голеней и стоп пациента. Кровать упрощает изменения положения секций кровати в пространстве и повышение надежности эксплуатации кровати в непрерывном круглосуточном режиме работы.
Недостатком кровати является отсутствие датчиков позиционирования углового положения секций, что снижает точность их установки в заданном положении.
В патенте (RU 87353 U1, МПК A61G 7/00, опубл. 10.10.2009) описана реабилитационная кровать, которая содержит основание на колесах с тормозами, панель с торцевыми съемными спинками и ложем с расположенным на нем противопролежневым матрацем. Ложе состоит из подвижных секций с приводами их позиционирования, соединенными с выходами блока формирования сигналов управления. Приводы выполнены в виде актюаторов, снабженных датчиками позиционирования секций, причем выходы этих датчиков соединены с входами блока формирования сигналов управления, а оси поворота секций расположены выше вершин углов их поворота на половину толщины противопролежневого матраца. Для обеспечения подъема ложа и его наклонов панель выполнена в виде рамной конструкции с площадками, между основанием и площадками установлены снабженные датчиками позиционирования рамы актюаторы в виде двух телескопических вертикально размещенных труб, верхние концы которых скреплены с площадками рамной конструкции карданными шарнирами.
Общими признаками известной кровати с заявляемой являются наличие основания на колесах, рамы с торцевыми съемными спинками, ложа, которое состоит из подвижных секций с механизмами их позиционирования, выполнением приводов в виде актюаторов, снабженных датчиками позиционирования, и наличием блока управления. Кровать по патенту RU 87353 U1, 2009 г. является наиболее близкой по большинству совпадающих признаков к кровати, входящей в заявляемые реабилитационный комплекс и поэтому принята в качестве прототипа.
Недостатком кровати является низкая надежность карданных шарниров, обеспечивающих боковые и вертикальные наклоны кровати, так как они работают под большой нагрузкой, складывающейся из веса пациента и веса верхней части кровати.
Устройство для управления системой, входящее в состав реабилитационного комплекса, является объектом самостоятельного изобретения.
Известен блок управления для медицинской кровати по патенту (RU 2224493 С1, МПК A61G 7/00, опубл. 27.02.2004), в который входит микропроцессор, угловой датчик положения ложа, коммутатор, пульт управления, прерыватель, перекидной переключатель. Управление программой осуществляется микропроцессором. Управление скоростью, амплитудой и периодом колебаний осуществляется скважностью и полярностью включения электродвигателя. С помощью коммутатора устанавливается направление движения ложа вверх или вниз. Блок управления обеспечивает непрерывное качание в автоматическом режиме только ложа, и поэтому не может быть использован для управления заявляемой кроватью.
Наиболее близким к заявляемому устройству для управления системой является блок формирования сигналов управления реабилитационной кроватью, описанный в патенте на полезную модель RU 87353 U1, 2009 г., который принят в качестве прототипа устройства для управления заявляемой системы. Устройство для управления кроватью, принятое за прототип, содержит блок формирования команд управления, которые обеспечивают позиционирование секций ложа и рамы в требуемых положениях и угловой ориентации.
Однако блок формирования, принятый за прототип, не обеспечивает контроль формируемых сигналов управления и не обеспечивает возможностью накопления результатов реабилитационного лечения и выработки рекомендаций по программе реабилитации поступившего пациента.
Общей задачей, на решение которой направлена данная группа изобретений, является создание реабилитационной кинетической системы, обеспечивающей реабилитацию практически всех категорий больных и инвалидов с патологиями опорно-двигательного, сегментарного аппарата, повреждения головного мозга в результате травм и заболеваний в различных стадиях.
Единый технический результат, достигаемы при использовании данной группы изобретений, заключается в расширении функциональных возможностей системы и в повышении надежности ее работы.
Технический результат достигается тем, что в реабилитационной кинетической системе,
включающей реабилитационную кровать и устройство для управления системой, причем реабилитационная кровать содержит раму основания, установленную на колесах, раму ложа, которое включает последовательно соединенные шарнирами, по меньшей мере, секцию спины, секцию таза, секцию бедра и секцию голени, а также секцию стопы, причем секция таза соединена неподвижно с рамой ложа, а секция спины, секция бедра, секция голени и секция стопы имеют механизмы регулирования наклона относительно рамы ложа, а устройство для управления системой содержит блок формирования команд управления для программного многократно повторяемого циклического позиционирования секций спины, таза, бедра, голени, стопы, и рамы ложа, согласно изобретению, реабилитационная кровать снабжена рамой наклона, которая расположена между рамой основания и рамой ложа, и снабжена механизмами регулирования латеральных наклонов рамы наклона относительно рамы основания, и механизмами регулирования продольного наклона рамы ложа относительно рамы наклона, вся система рам и секций содержит восемь механизмов регулирования, каждый из которых содержит актуатор с элементами передачи движения в виде рычагов и шарниров, актуаторы секций спины, голени и бедра шарнирно соединены с опорами на раме секции таза, актуатор секции стопы - с опорой на подвижной рамке секции голени, актуаторы латеральных углов наклона - с опорами на раме основания, актуатор наклона головной части рамы ложа - с опорой на раме ложа, актуатор наклона ножной части рамы ложа - с опорой на раме наклона, оси рычагов секций спины, голени и бедра и наклона головной части рамы ложа закреплены на раме ложа, оси рычагов латеральных наклонов - на раме основания, оси рычага наклона ножной части рамы ложа - на раме наклона, плечи рычагов всех секций соединены шарнирно со штоками актуаторов, концы плеч рычагов секций спины, бедра установлены подвижно в направляющих, закрепленных на рамах секций спины и бедра, соответственно, концы рычагов плеч секции голени установлены подвижно в стойках на секции голени, концы плеч рычагов правого латерального наклона установлены подвижно в направляющих, закрепленных на раме наклона, концы плеч рычагов левого латерального наклона установлены подвижно в стойках, закрепленных на раме наклона, концы плеч рычагов наклона головной части рамы ложа установлены подвижно в стойках на раме наклона, концы плеч рычагов наклона ножной части рамы ложа установлены подвижно в направляющих на раме ложа, шарнирное соединение бедро-голень расположено на подвижной в продольном направлении каретке секции бедра с возможностью фиксации заданной длины секции бедра, секция стопы установлена на подвижной в продольном направлении рамке секции голени с возможностью фиксации заданной длины секции голени, а устройство для управления системой выполнено с возможностью дополнительного формирования команд управления для позиционирования рамы наклона относительно рамы основания, и рамы ложа относительно рамы наклона, а также с возможностью накопления результатов реабилитационного лечения, выработки рекомендаций по программе реабилитации и их приема/передачи.
Технический результат достигается также тем, что:
рама основания содержит две продольные балки, торцевую поперечину, две внутренние поперечины, четыре кронштейна крепления колес, две стойки с осевыми частями шарнирного соединения актуаторов правого и левого латерального наклонов, четыре стойки с осями для установки вала рычага левого и правого латеральных наклонов;
рама наклона содержит две продольные боковые балки, две внутренние продольных балки, две торцевые поперечины и первую и вторую внутренние поперечины корытообразной формы, две стойки для крепления концов плеч рычага левого латерального наклона, и две направляющие для установки опорных роликов концов плеч рычага правого латерального наклона, при этом на первой внутренней поперечине рамы наклона установлена опора с осевой частью шарнирного соединения актуатора наклона ножной части рамы ложа, а на концах продольных боковых балок со стороны головы расположены оси для установки вала рычага наклона ножной части рамы ложа;
рама ложа содержит две продольные боковые балки, первую торцевую поперечину, вторую торцевую поперечину, внутреннюю поперечину, две продольные направляющие, закрепленные на первой и второй поперечинах, раму секции таза, неподвижно закрепленную на продольных боковых балках, на продольных боковых балках последовательно расположены оси вала рычага секции спины, оси вала рычага секции бедра, оси вала рычага секции голени, а на стойках - оси вала рычага наклона ножной части рамы ложа, на продольных боковых балках установлены также четыре кронштейна для установки бокового ограждения, на правой продольной боковой балке - труба разводки, и кронштейн разъема;
на раме таза установлены втулочные части шарнирных соединений секций спины-таза, втулочные части шарнирных соединений секций таза-голени, осевые части шарнирных соединений актуатора спины, актутора бедра и актуатора голени;
рычаг секции спины содержит вал, плечо актуатора и два параллельных плеча секции спины, закрепленные на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч секции спины оканчиваются опорными роликами;
рычаг секции бедра сдержит вал, плечо актуатора, и два параллельных плеча секции бедра, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч секции бедра оканчиваются опорными роликами;
рычаг секции голени содержит вал, плечо актуатора секции голени, и два параллельных плеча секции голени, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча секции голени, при этом плечи секции голени выполнены с возможностью удлинения в продольном направлении;
рычаг правого латерального наклона содержит вал, плечо актуатора правого наклона и два параллельных плеча правого наклона, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч правого наклона оканчиваются опорными роликами;
рычаг левого латерального наклона содержит вал, плечо актуатора левого наклона и два параллельных плеча левого наклона, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч левого наклона оканчиваются осями;
рычаг наклона ножной части верхней рамы содержит вал, плечо актуатора наклона ножной части и два параллельных плеч наклона ножной части, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч наклона ножной части оканчиваются опорными роликами;
рычаг наклона головной части верхней рамы содержит вал, плечо актуатора наклона головной части и два параллельных плеч наклона головной части, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч наклона головной части оканчиваются осями.
Технический результат в части устройства для управления системой достигается тем, что
в устройство для управления системой, содержащее блок формирования команд управления, согласно изобретению, введены блок ввода/вывода, последовательно соединенные блок обработки и хранения программ лечения и блок контроля программ реабилитации, последовательно соединенные блок интерфейсный и блок коммутации, а также блок приема/передачи программ управления и сервер, при этом вход/выход блока ввода/вывода соединен двухсторонней связью с входом/выходом блока обработки и хранения программ реабилитации, к первому входу которого подключен второй выход блока контроля программ реабилитации, выход блока контроля программ реабилитации соединен с входом блока формирования команд управления, выход которого соединен с первым входом блока интерфейсного, выходная шина блока коммутации соединена с управляющими входами актуаторов, выходы датчиков положения которых соединены с второй входной шиной блока интерфейсного, второй выход которого соединен с вторым входом блока обработки и хранения программ реабилитации, а блок приема/передачи программ управления связан двунаправленными каналами связи с вторым входом/выходом блока обработки и хранения программ реабилитации и с сервером, который выполнен с возможностью накопления результатов реабилитационного лечения и выработки рекомендаций по программе реабилитации.
Изобретение иллюстрируется чертежами, на которых представлены:
на фиг.1 - исходное положение кровати;
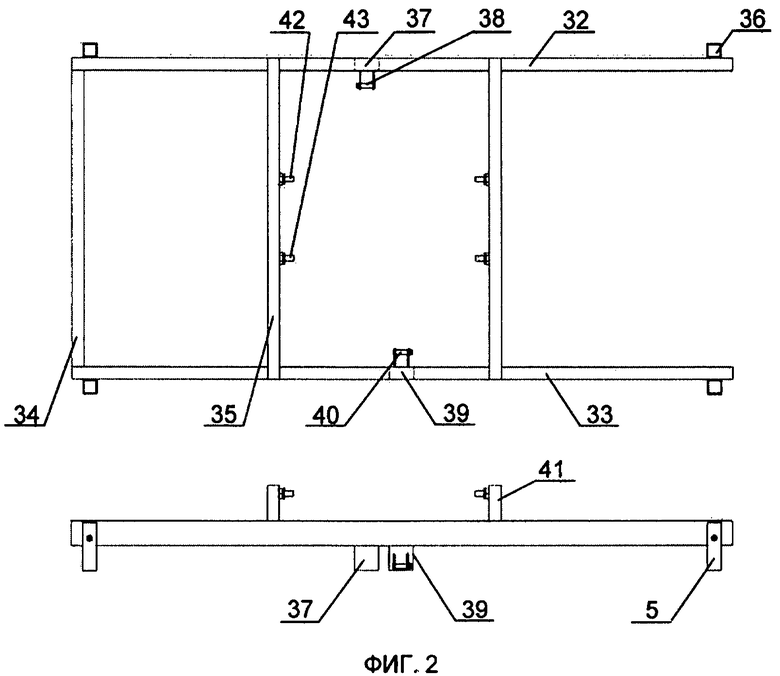
на фиг.2 - рама основания;
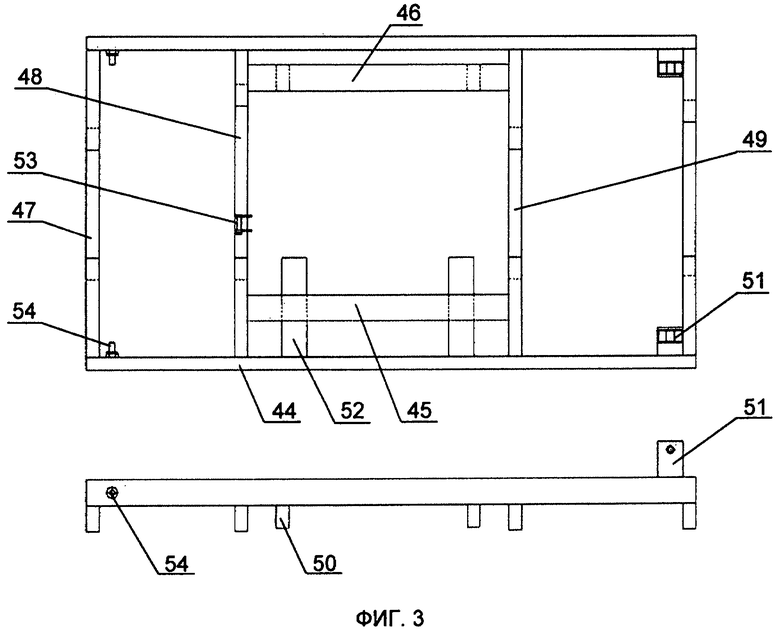
на фиг.3 - рама наклона;
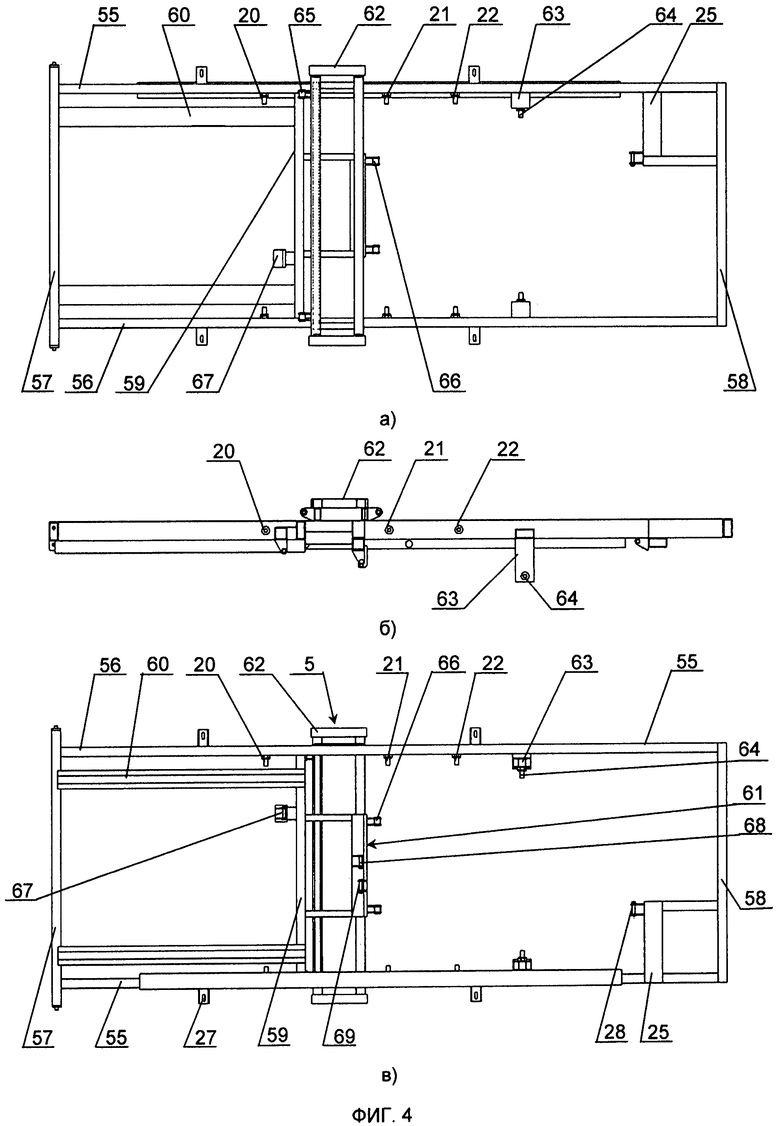
на фиг.4 - рама ложа;
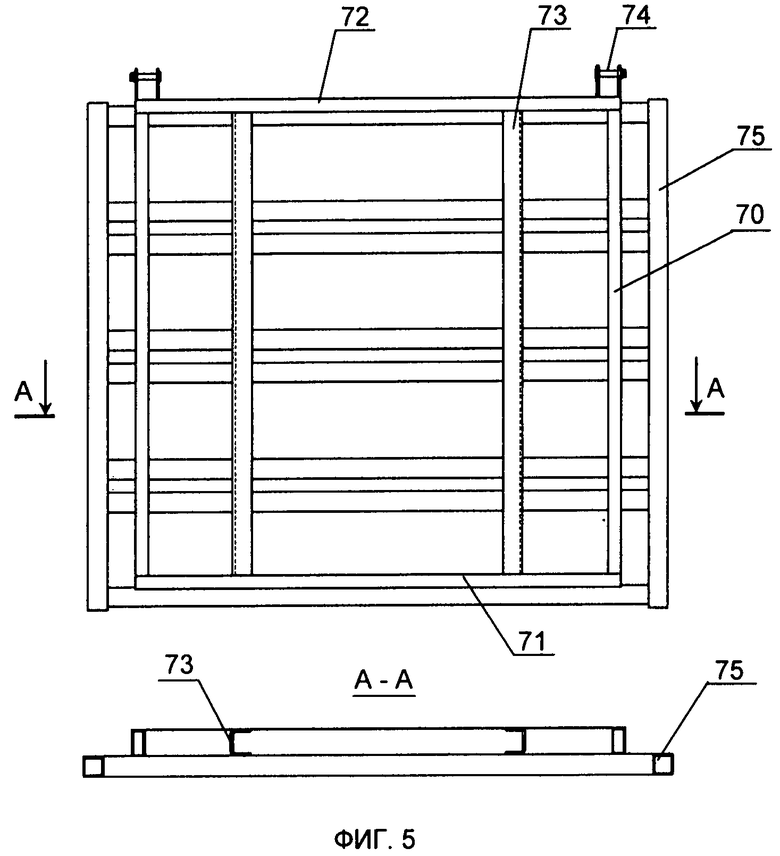
на фиг.5 - секция спины;
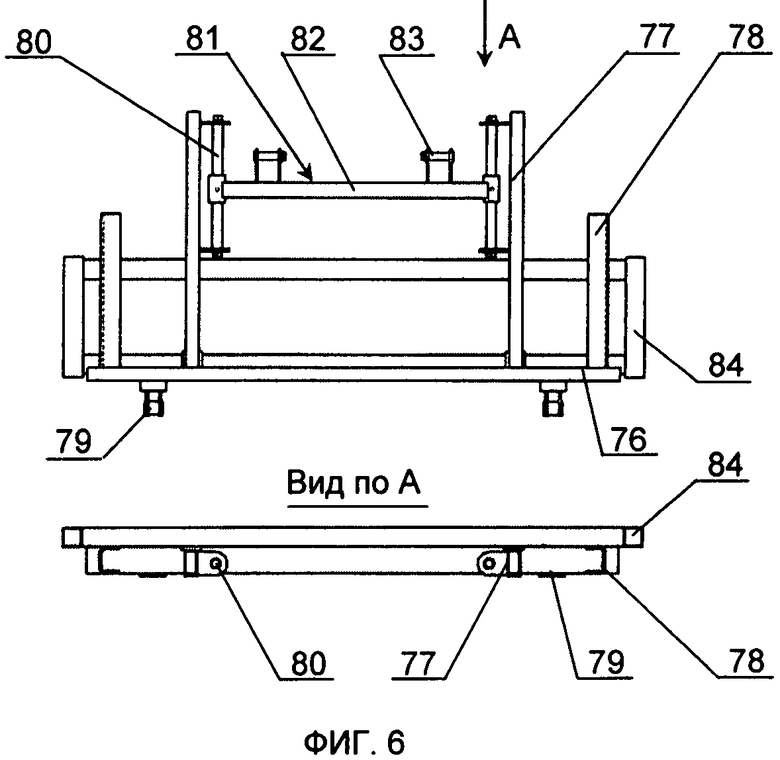
на фиг.6 - секция бедра;
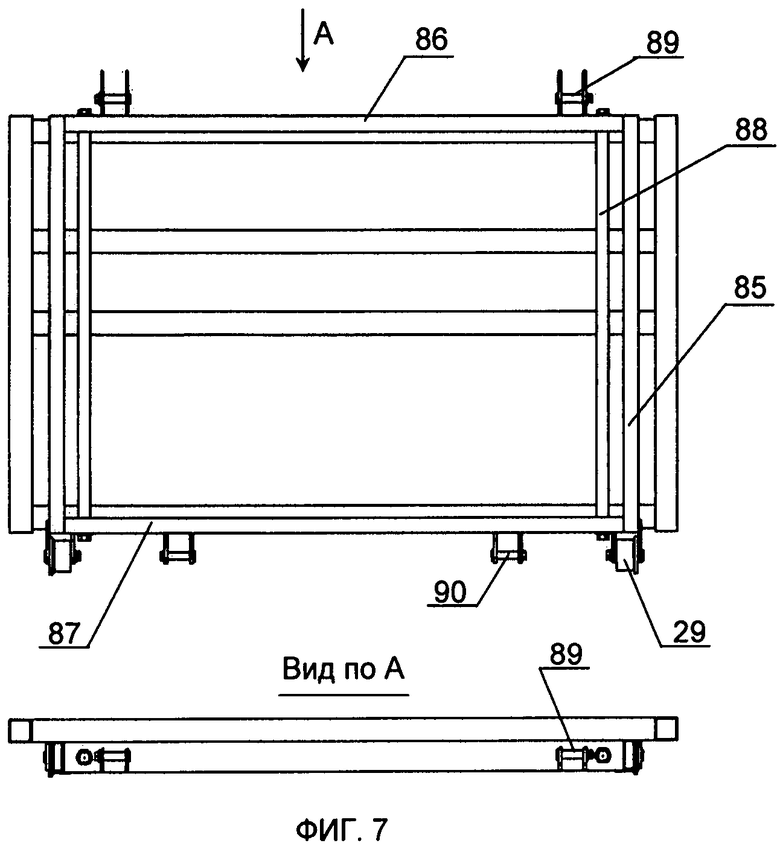
на фиг.7 - секция голени;
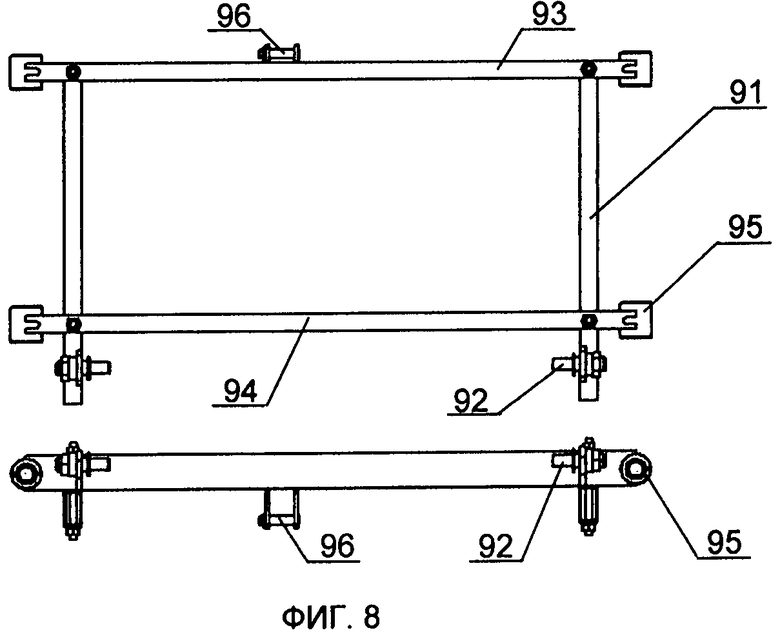
на фиг.8 - подвижная рамка;
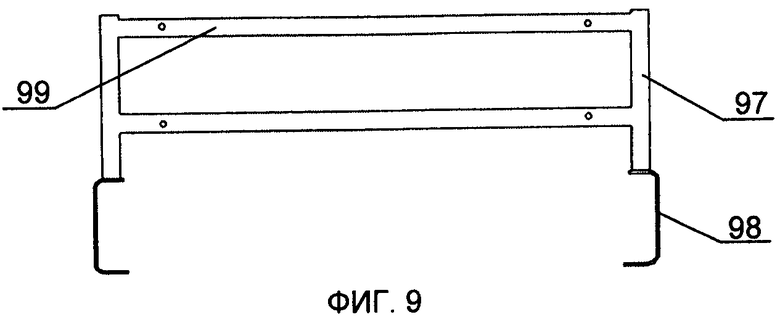
на фиг.9 - секция стопы;
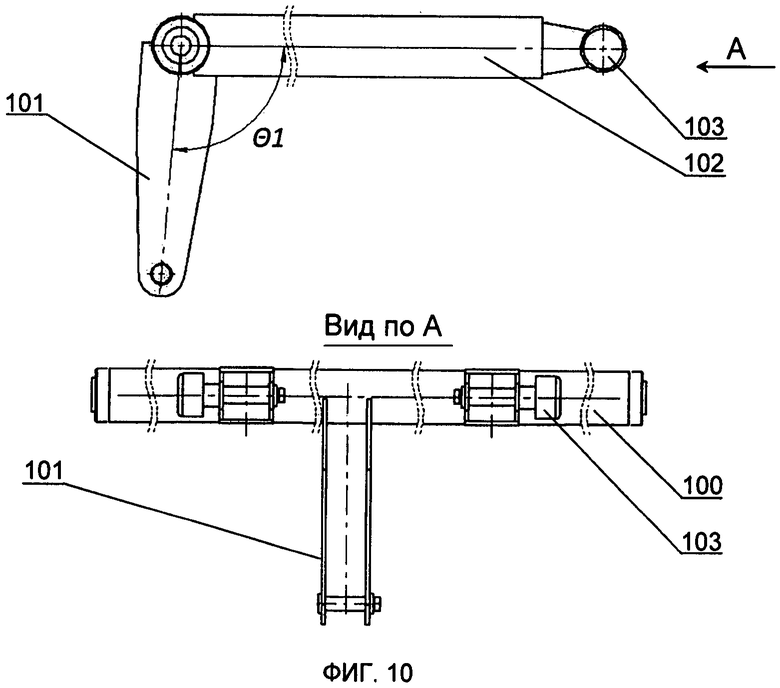
на фиг.10 - рычаг секции спины;
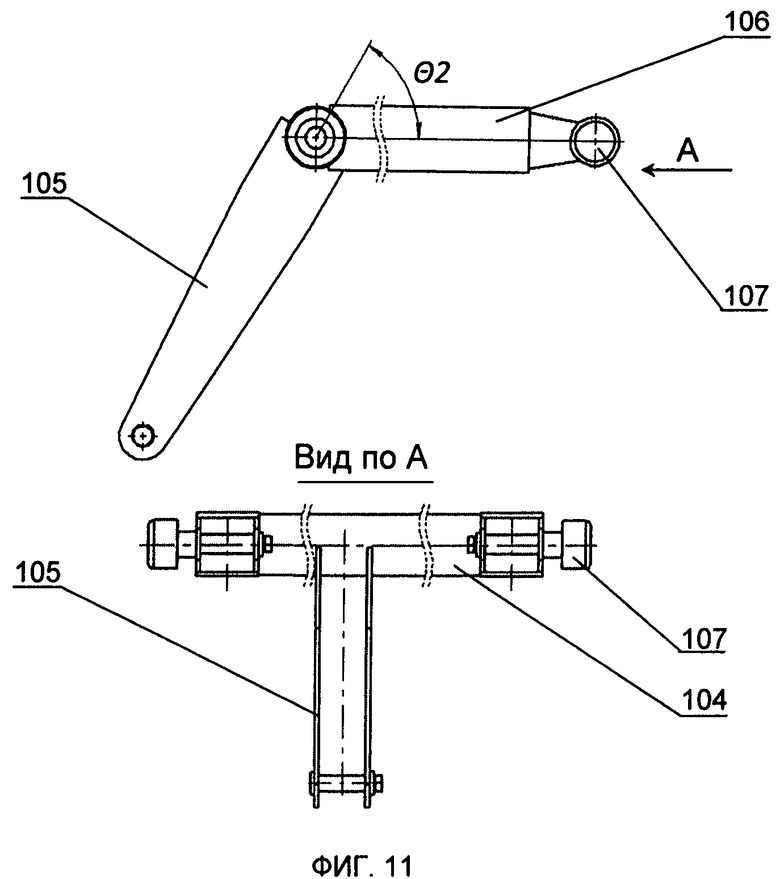
на фиг.11 - рычаг секции бедра;
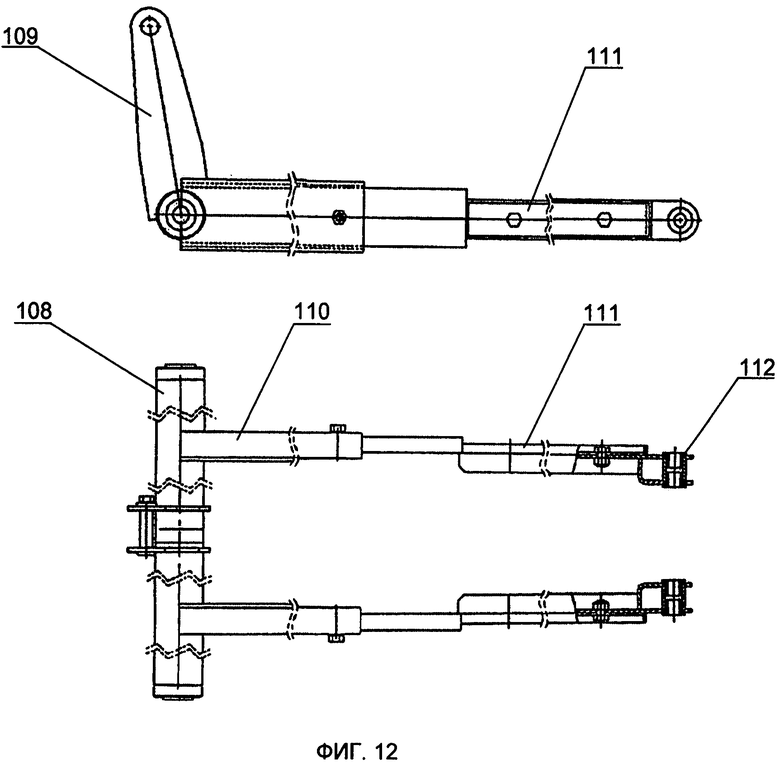
на фиг.12 - рычаг секции голени;
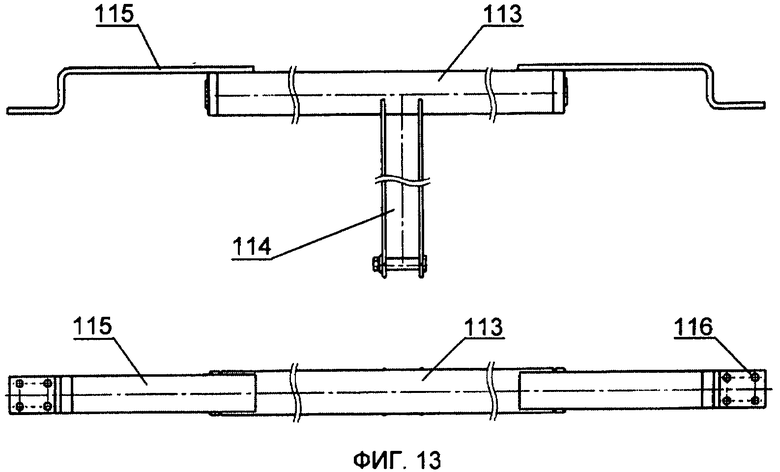
на фиг.13 - рычаг секции стопы;
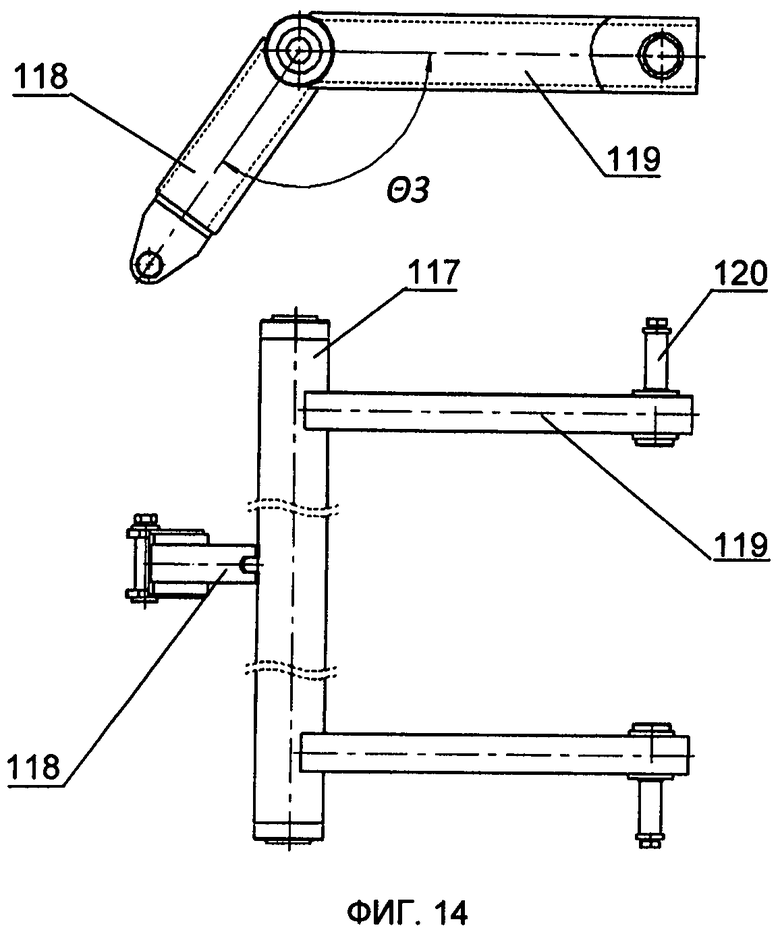
на фиг.14 - рычаг левого латерального наклона;
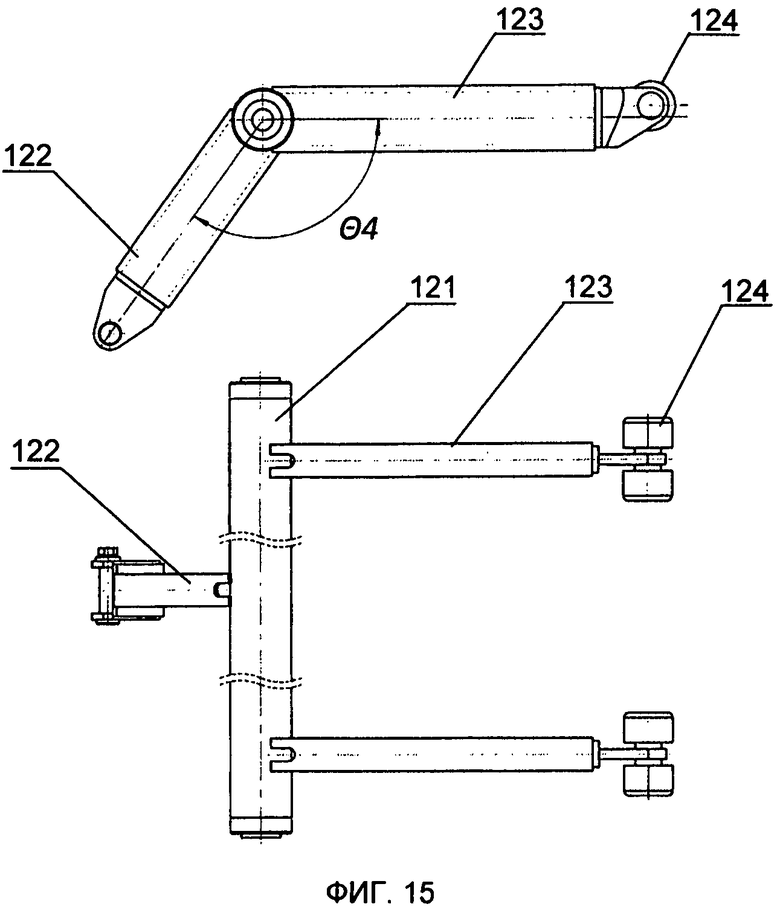
на фиг.15 - рычаг правого латерального наклона;
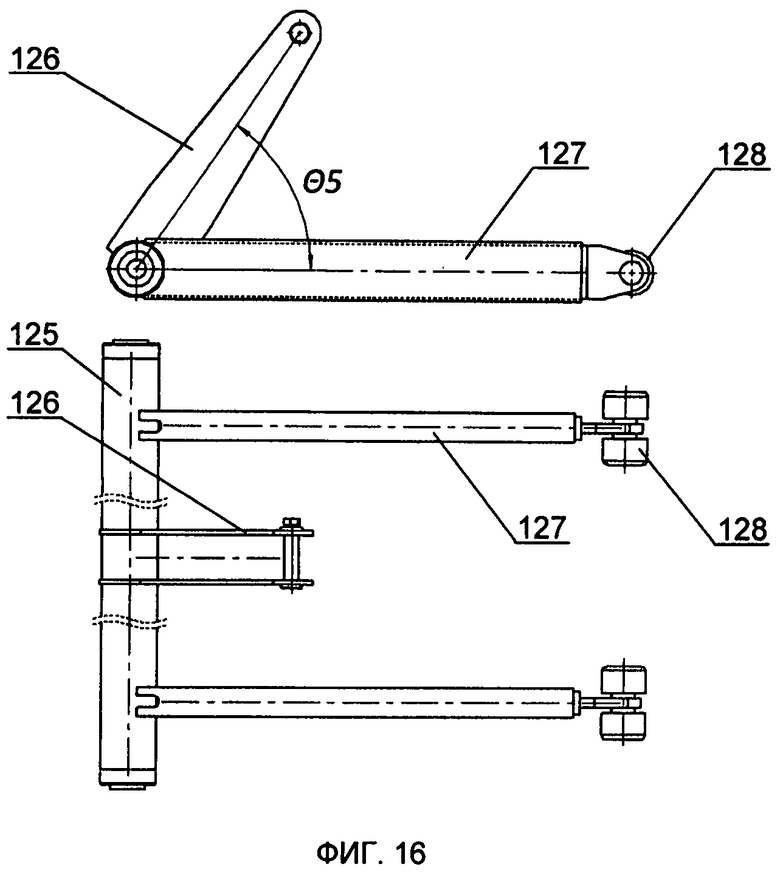
на фиг.16 - рычаг наклона головной части рамы ложа;
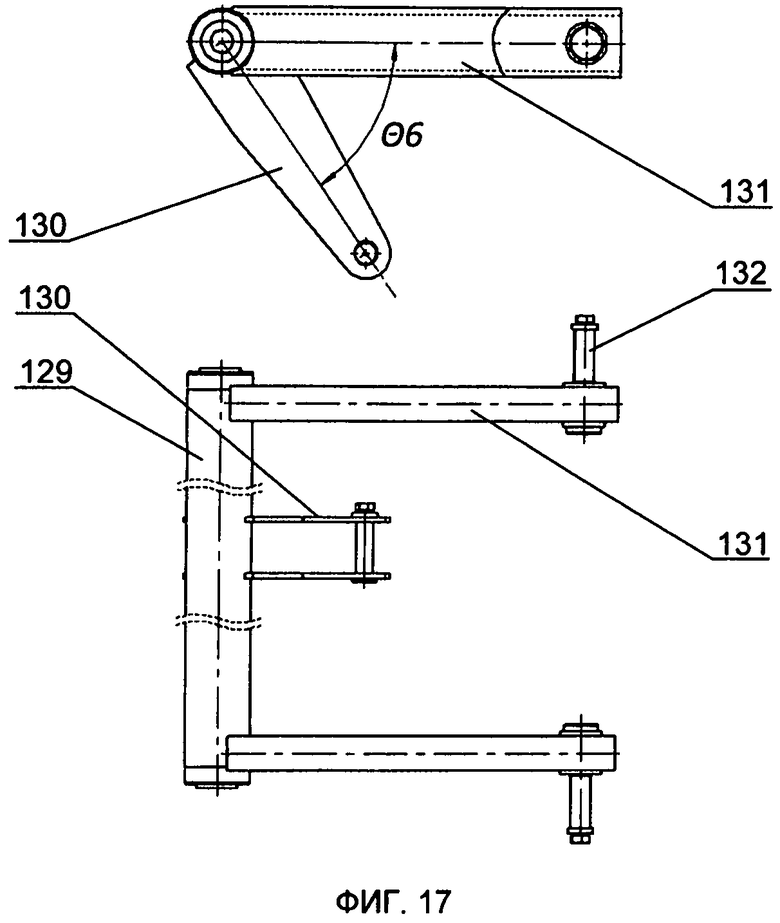
на фиг.17 - рычаг наклона ножной части рамы ложа;
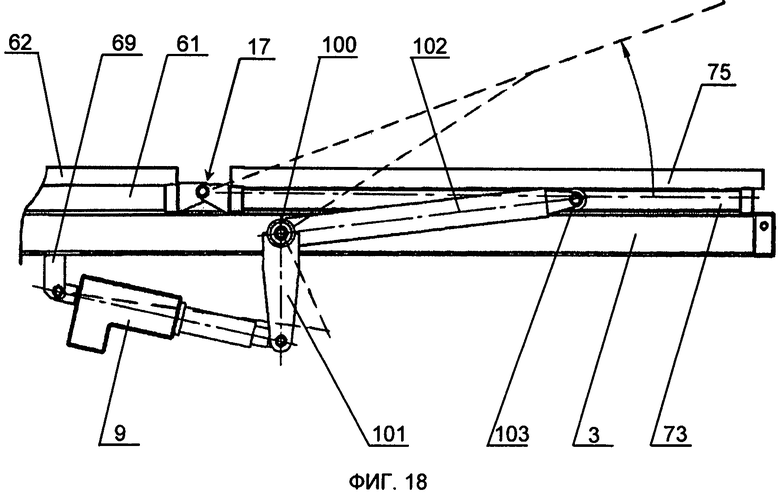
на фиг.18 - механизм регулирования наклона секции спины;
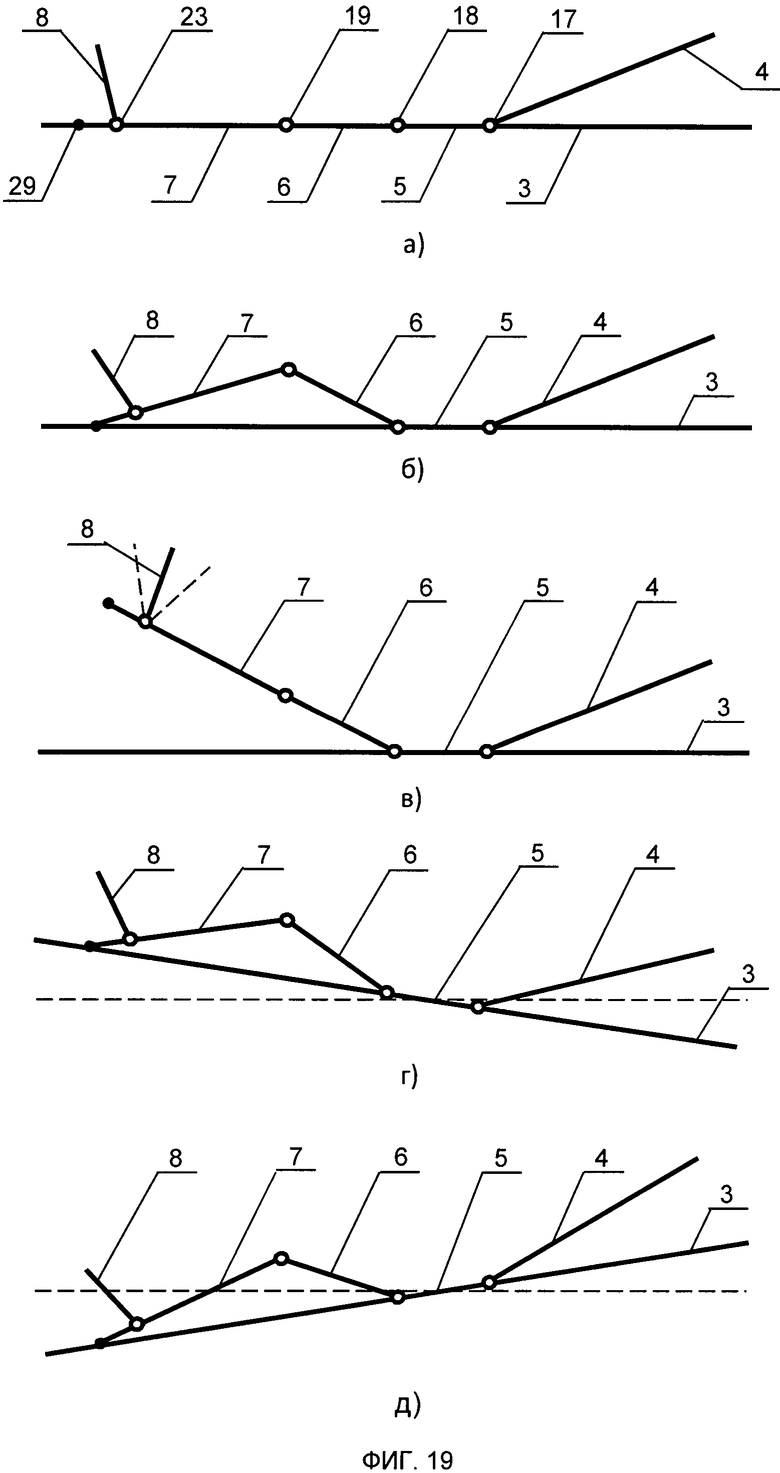
на фиг.19 - рабочие положения секций;
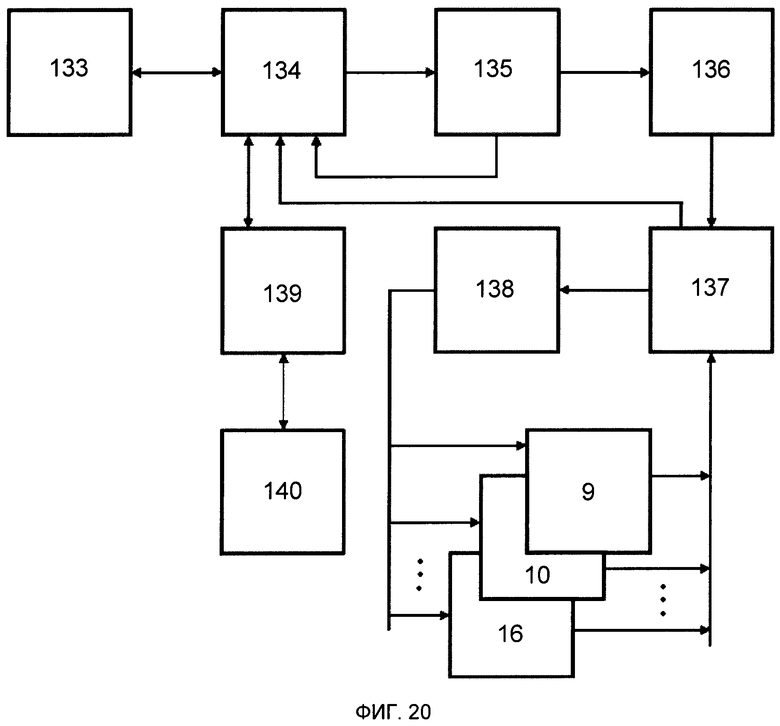
на фиг.20 - структурная электрическая схема устройства для управления системой.
Реабилитационная кинетическая система состоит из реабилитационной кровати, содержащей раму 1 основания, раму 2 наклона и раму 3 ложа, и устройства 31 для управления системой. Рама 1 основания является опорной, и установлена на четырех колесах 30, по крайней мере, два из которых, преимущественно со стороны ног, снабжены центральными тормозами (на чертежах не показаны). На раме 3 ложа смонтированы последовательно соединенные шарнирными соединениями 17, 18 и 19 секция 4 спины, секция 5 таза, секция 6 бедра и секция 7 голени. Секция 8 стопы установлена на секции 7 голени. Рама 2 наклона расположена между рамой 1 основания и рамой 3 ложа и предназначена для обеспечения латеральных наклонов рамы 2 наклона относительно рамы 1 основания и продольных наклонов рамы 3 ложа относительно рамы 2 наклона.
Вся система рам и секций содержит восемь механизмов регулирования, которые содержат актуаторы 9-16 с элементами передачи движения в виде рычагов и шарниров. На раме 1 ложа установлены ось 20 рычага секции спины, ось 21 рычага секции бедра, ось 22 рычага секции голени. Ось 23 рычага секции стопы установлена на секции голени.
Устройство 31 для управления системой подключается к кровати с помощью разъема, устанавливаемого на кронштейне 25 рамы 3 ложа, а монтаж проводов выполняется с использованием трубы 24 разводки. В головной части кровати установлена торцевая спинка 26, а к кронштейнам 27 крепятся боковые ограждения.
На фиг.2 приведено изображение рамы 1 основания, головная части расположена слева. Рама 1 основания содержит две продольные боковые балки 32 и 33, торцевую поперечину 34, две внутренние поперечины 35, четыре кронштейна 36 крепления колес, стойку 37 с втулочной частью 38 шарнирного соединения актуатора 13 правого латерального наклона, стойку 39 с втулочной частью 40 шарнирного соединения актуатора 14 левого латерального наклона, четыре стойки 41 с двумя осями 42 для установки вала рычага левого латерального наклона, и двумя осями 43 для установки вала рычага правого латерального наклона.
Рама 2 наклона содержит (см. фиг.3) две продольные боковые балки 44, две внутренние продольные балки 45 и 46, две торцевые поперечины 47, две внутренние поперечины 48 и 49, две стойки 50, две стоки 51 и две направляющие 52. Торцевые и внутренние поперечины 47, 48 и 49 имеют корытообразную форму, которая обеспечивает свободное перемещение актуаторов при работе механизма. На поперечине 48 рамы 2 наклона находится кронштейн 53 шарнирного крепления актуатора 16 наклона ножного конца рамы ложа, а на внутренних концах балок 44 (со стороны головы) установлены оси 54 для установки вала рычага наклона ножного конца рамы ложа. Стойки 51 предназначены для крепления осей концов плеч рычага наклона головного конца рамы 3 ложа. Стойки 50 предназначены для крепления осей концов плеч рычага левого латерального наклона. Направляющие 52 предназначены для установки опорных роликов 128 концов плеч рычага правого латерального наклона.
На фиг.4 приведено изображение рамы 3 ложа, где 4а - вид сверху, 4б - вид сбоку, 4в - вид снизу. Рама 3 ложа содержит две продольные боковые балки 55 и 56, торцевую поперечину 57, торцевую поперечину 58, внутреннюю поперечину 59, две продольные направляющие 60, закрепленные на поперечинах 58 и 59, секцию таза 5, содержащую раму 61 секции таза, неподвижно закрепленную на продольных боковых балках 55 и 56, и панель 62 секции таза, установленную сверху на раме 61 секции таза.
На продольных боковых балках 55 и 56 рамы ложа осесиммеррично расположены оси 20 вала рычага секции спины, оси 21 вала рычага секции бедра, оси 22 вала рычага секции голени, а на стойках 63 - оси 64 вала рычага наклона головной части рамы ложа.
На раме 61 таза установлены втулочные части 65 шарнирных соединений 17 секций спина-таз, втулочные части 66 шарнирных соединений 18 секций таз-бедро, осевая часть 67 шарнирного соединения актуатора 10 бедра, осевой часть 68 шарнирного соединения актуатора 11 голени, осевой часть 69 шарнирного соединения актуатора 9 спины.
На продольных боковых балках 55 и 56 установлены также четыре кронштейна 27 для установки бокового ограждения, на продольной боковой балке 55 - труба 24 разводки, и кронштейн 25 разъема.
Секция 5 спины обеспечивает подъем спины пациента.
Секция 5 спины содержит (см. фиг.5) раму, составленную из двух боковых балок 70 и двух поперечин 71 и 72, на которых снизу установлены две продольные П-образные направляющие 73 для опорных роликов плеч рычага спины. На поперечине 72 установлены две осевые части 74 шарнирного соединения 17 секций спина-таз. Сверху на раме установлена панель 75 секции спины.
Секция 6 бедра обеспечивает подъем бедренной части пациента со сгибанием ног в коленях.
Секция 6 бедра содержит (см. фиг.6) раму, составленную из поперечной балки 76, двух консолей 77 и двух продольные направляющих 78 для опорных роликов 107 рычага бедра. На поперечной балке 76 установлены две втулочные части 79 шарнирных соединений 19 секций бедро-голень. На консолях 77 закреплены два штыря 80, на которых установлена каретка 81 с возможностью ее перемещения по штырям 80 и фиксации заданного положения. На поперечине 82 каретки закреплены две осевые части 83 шарнирного соединения 18 таз-бедро. Сверху на раме закреплена панель 84 секции бедра. Изменение положения каретки 81 позволяет изменять расстояние между шарнирными соединениями 18 таз-бедро и 19 бедро-голень, то есть регулировать длину секции 6 бедра под размер бедра пациента.
Секция 7 голени обеспечивает выпрямление ног пациента в коленях при поднятом бедре.
Секция 7 голени содержит (см. фиг.7) раму, составленную из двух продольных балок 85, на концах которых установлены опорные ролики 29 секции голени, и двух поперечин 86 и 87, на которых установлены два продольных штыря 88. На поперечине 86 установлены две осевые части 89 шарнирного соединения 19 бедро-голень, а на поперечине 87 - две осевые части 90 шарнирного соединения плеч 110 рычага секции 7 голени.
На штырях 88 установлена подвижная рамка (см. фиг.8), составленная из двух боковых балок 91, на выступающих концах которых установлены оси 92 для установки вала 113 рычага секции 8 стопы, и двух поперечин 93 и 94, на выступающих концах которых установлены муфты 95, обеспечивающие возможность перемещения рамки и ее фиксации в заданном положении. На поперечине 93 установлена осевая часть шарнирного соединения 96 актуатора 12 секции 8 стопы.
Изменение положения подвижной рамки позволяет изменять расстояние между шарнирными соединениями 19 бедра-голени и секцией 8 стопы, закрепленной на вале 113 рычага секции 8 стопы, то есть регулировать длину секции 7 голени под размер голени пациента.
Секция 8 стопы обеспечивает сгибание и разгибание стоп пациента.
Секция 8 стопы содержит (см. фиг.9) раму из двух боковых балок 97, на выступающих концах которых установлены П-образные кронштейны 98 для крепления рамы секции 8 стопы к кронштейнам 115 вала 113 рычага секции стопы, и двух поперечин 99. На рамку секции стопы надевается мягкий чехол, на котором со стороны ног расположены крепления для стоп, с фиксацией, например в виде липучек (на чертежах не показаны).
Секция 6 таза закреплена на раме 3 неподвижно. Секции ложа: спины, таза, бедра, голени и стопы, рама 2 наклона и рама 3 ложа имеют механизмы регулирования их перемещения. Вся система рам и секций содержит восемь механизмов регулирования, каждый из которых содержит актуаторы с элементами передачи движения в виде рычагов и шарниров. Механизм регулирования наклона секции 4 спины содержит актуатор 9, рычаг секции спины и продольные направляющие 73. Корпус актуатора 9 шарнирно соединен с опорой 69 на раме 61 таза. Рычаг секции спины содержит (см. фиг.10) вал 100, плечо 101 актуатора, соединенное шарнирно со штоком актуатора 9, и два параллельных плеча 102 секции спины, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора на угол θ1. Вал 100 рычага спинной секции установлен на осях 20, расположенных на продольных балках 55 и 56 рамы 3 ложа. Концы плеч 102 рычага секции спины оканчиваются опорными роликами 103, которые размещены в направляющих 73 секции спены (см. фиг.5), с возможностью вращения и перемещения. При выдвижении штока актуатора 9 (см. фиг.16) плечо 101 актуатора и, следовательно, плечи 102 спинной секции поворачиваются, при этом линейное движение опорных роликов 103 по направляющим 73 преобразуется во вращательное движение секции 4 спины на шарнирном соединении 17, и последняя изменяет угол наклона относительно рамы 3 ложа, то есть происходит подъем секции 4 спины (см. фиг.19а).
Соотношение длин плеч и угла их разворота выбирают из условия обеспечения подъема секции спины на заданный угол при известной длине рабочего хода штока актуатора.
Принцип действия механизмов регулирования угла наклона секций спины и бедра одинаков.
Механизм регулирования наклона секции 5 бедра содержит актуатор 10, рычаг секции бедра и продольные направляющие 78, закрепленные на раме секции 5 бедра. Рычаг секции бедра (см. фиг.11) состоит из вала 104, плеча 105 актуатора, соединенного шарнирно со штоком актуатора 10, и двух параллельных плеч 106 секции бедра, закрепленных на валу 104 с разносом вдоль оси вала и с поворотом относительно плеча 105 на угол θ2. Вал 104 рычага секции бедра установлен на осях 21, расположенных на продольных балках 55 и 56 рамы 3 ложа. Корпус актуатора 10 шарнирно соединен с опорой 67 (см. фиг.4в) на раме 61 таза, а конец штока шарнирно соединен с плечом 105 актуатора. Концы плеч 106 секции бедра оканчиваются опорными роликами 107, которые размещены в направляющих 78 (см. фиг.6) с возможностью вращения и перемещения. При выдвижении штока актуатора 10, плечо 104 актуатора и, следовательно, плечи 106 секции бедра поворачиваются вокруг оси, при этом линейное движение роликов 107 по направляющим 78 преобразуется во вращательное движение секции 5 бедра, и последняя изменяет угол наклона относительно рамы 3 ложа. Одновременно за счет шарнирного соединения 19 бедро-голень поднимается головной край секции голени, при этом опорные ролики 29 секции голени скользят по поверхности продольных балок 55 и 56 рамы 3 ложа, то есть происходит изменение положений секций бедра и голени, что обеспечивает подъем бедра пациента со сгибанием ног в коленях (см. фиг.19г).
Механизм регулирования наклона секции 7 голени содержит актуатор 11 и рычаг секции голени. Корпус актуатора 11 шарнирно соединен с осевой частью 68 шарнирного соединения на раме 61 таза. Рычаг секции голени (см. фиг.12) содержит вал 108, плечо 109 актуатора, соединенное шарнирно со штоком актуатора 11, и два параллельных плеча 110 секции голени, закрепленных на валу с разносом вдоль оси вала и с поворотом относительно плеча 109 актуатора. Вал 108 рычага секции голени установлен на осях 22 на продольных балках 55 и 56 рамы 3 ложа. Оконечные части 111 плеч 110 секции голени выполнены подвижными в продольном направлении, например телескопическими, что необходимо для изменения длины плеч 110 при изменении углового положения секции 7 голени.
Концы плеч 110 секции голени заканчиваются втулками 112, которые закреплены в осевых частях 90 шарнирного соединения, расположенных на поперечине 87 в конце секции 5 голени (см. фиг.7). При выдвижении штока актуатора 11, плечо 109 актуатора и, следовательно, плечи 110 секции голени поворачиваются вокруг оси, ножной конец секции 5 голени поднимается и секция 7 голени изменяет угол наклона относительно секции 6 бедра, что обеспечивает выпрямление колен в поднятом положении бедер (см. фиг.19в). Подъем и опускание секции 7 голени возможет только при поднятом положении секции 6 бедра.
Механизм регулирования наклона секции 8 стопы содержит актуатор 12 и рычаг секции стопы. Корпус актуатора 12 шарнирно соединен с осевой частью 96 шарнирного соединения, установленной на подвижной рамке (см. фиг.8). Рычаг секции стопы (см. фиг.13) состоит из вала 113, плеча 114 актуатора, соединенного шарнирно со штоком актуатора 12, и двух изогнутых под прямым углом кронштейнов 115, закрепленных на концах вала в одной плоскости с плечом 114 актуатора. На концах кронштейнов 115 крепится рамка секции 8 стопы, например с помощью с помощью крепежных отверстий 116. Вал 113 рычага секции стопы установлен на осях 92 на подвижной рамке (см. фиг.8). При выдвижении штока актуатора 12, плечо 114 актуатора и, следовательно, кронштейны 115 поворачиваются, и рамка секции 8 стопы изменяет угол наклона относительно секции 7 голени (см. фиг.19г), что обеспечивает подошвенное и тыльное сгибания стоп пациента.
Механизм регулирования левого латерального наклона рамы 2 наклона содержит актуатор 13 и рычаг левого наклона. Корпус актуатора 13 шарнирно соединен осью с втулочной частью 38 шарнирного соединения, установленной на стойке 37 боковой балки 32 рамы основания (см. фиг.2). Рычаг левого наклона содержит 9 (см. фиг.14) вал 117, плечо 118 актуатора левого наклона, соединенное шарнирно со штоком актуатора 13, и двух параллельных плеч 119 рычага левого наклона, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора 118 на угол θ3. Вал 117 рычага левого наклона установлен на осях 42 стоек 41 (см. фиг.2), установленных на продольных балках 35 рамы 1 основания. Концы плеч 119 рычага левого наклона оканчиваются осями 120, которые установлены в стойках 50 на раме 2 наклона, с возможностью вращения (см. фиг.3). При выдвижении штока актуатора 13, плечо актуатора 118 и, следовательно, плечи 119 рычага левого наклона поворачиваются вокруг оси, поднимая правый край рамы 2 наклона относительно рамы 1 основания, что обеспечивает левый латеральный наклон тела пациента.
Механизм регулирования правого латерального наклона рамы 2 наклона содержит актуатор 14 и рычаг правого латерального наклона. Корпус актуатора 14 шарнирно соединен осью с втулочной частью 40, установленной на стойке 39 боковой балки 33 рамы 1 основания (см. фиг.2). Рычаг правого латерального наклона содержит (см фиг.15) вал 121, плечо 122 актуатора правого наклона, соединенное шарнирно со штоком актуатора, и двух параллельных плеч 123 рычага правого наклона, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора на угол θ4. Вал 121 рычага правого наклона установлен на осях 43 стоек 41, установленных на продольных балках 35 рамы 1 основания (см. фиг.2). Концы плеч 123 правого наклона оканчиваются опорными роликами 124, которые размещены в направляющих 52 рамы 2 наклона, с возможностью вращения и перемещения (см. фиг.3). При выдвижении штока актуатора 14, плечо 122 актуатора и, следовательно, плечи 123 рычага правого наклона поворачиваются вокруг оси, при этом линейное движение роликов 124 по направляющим 52 преобразуется во вращательное движение рамы 2 наклон, левый край рамы поднимается, тем самым изменяя угол правого наклона рамы 2 наклона и рамы 3 ложа относительно рамы 1 основания, что обеспечивает правый латеральный наклон тела пациента.
При одновременном включении актуатора 13 левого латерального наклона и актуатора 14 правого латерального наклона происходит изменение высоты рамы 2 наклона, которая остается при этом в горизонтальном положении.
Механизм регулирования наклона ножной части рамы 3 ложа содержит актуатор 15 и рычаг наклона ножной части. Корпус актуатора 15 шарнирно соединен с осевой частью 53 шарнирного соединения, установленного на поперечной балке 48 рамы 2 наклона (см. фиг.3). Рычаг наклона ножной части содержит (см. фиг.16) вал 125, плечо 126 актуатора наклона ножной части, соединенное шарнирно со штоком актуатора 15, и двух параллельных плеч 127 рычага наклона ножной части, закрепленных на валу 125 с разносом вдоль оси вала и поворотом относительно плеча 126 актуатора на угол 65. Вал 125 рычага наклона ножной части установлен на осях 54 на продольных боковых балках 44 рамы 2 наклона (см. фиг.3). Концы плеч 127 наклона ножной части оканчиваются опорными роликами 128, которые размещены в продольных направляющих 60 рамы 3 верхней с возможностью вращения и перемещения (см. фиг.4в). При выдвижении штока актуатора, плечо 126 актуатора и, следовательно, плечи 127 наклона ножной части поворачиваются вокруг оси, при этом линейное движение роликов 128 по направляющим 60 преобразуется во вращательное движение рамы 3 ложа, которая наклоняется в строну ног относительно рамы 2 наклона, что обеспечивает продольный наклон тела пациента (см. фиг.19д).
Механизм регулирования наклона головной части рамы 3 ложа содержит актуатор 16 и рычаг наклона головной части. Корпус актуатора 16 соединен с осевой частью 28 шарнирного соединения, установленного на кронштейне 25 разъема. Рычаг наклона головной части (см. фиг.17) содержит вал 129, плечо 130 актуатора, соединенное шарнирно со штоком актуатора, и двух параллельных плеч 131 рычага наклона головной части, закрепленных на валу 129 с разносом вдоль оси вала и поворотом относительно плеча 130 актуатора на угол θ6. Вал 129 рычага наклона головной части установлен на осях 64, закрепленных на стойках 63 рамы 3 ложа (см. фиг.4). Концы плеч 129 наклона головной части оканчиваются осями, которые установлены в стойках 51 на раме 2 наклона, с возможностью вращения. При выдвижении штока актуатора, плечо 130 актуатора и, следовательно, плечи 131 рычага наклона головной части поворачиваются вокруг оси, при этом рама 3 ложа наклоняется в сторону головы относительно рамы 2 наклона, что обеспечивает продольный наклон тела пациента (см. фиг.19г).
При одновременном включении актуатора 15 наклона ножной части и актуатора 16 наклона головной части рамы ложа происходит изменение высоты рамы 3 ложа, которая остается при этом в горизонтальном положении.
В целом функциональная кровать обеспечивает регулирование длины секции бедра и голени и управление (см. фиг.19) девятью положениями секций и ложа: подъем секции 4 спины (фиг.19а), секции 6 бедра (фиг.19б) и секции 7 голени (фиг.19в), наклон секции 8 стопы (фиг.19в), продольный наклон головной (фиг.19г) и ножной (фиг.19д) части рамы 3 ложа, левый и правый латеральные наклоны рамы 3 ложа, подъем рамы 3 ложа. При этом допустим любая последовательность изменения положения элементов.
Функциональная кровать обеспечивает движение сегментов кровати в следующих предельных значениях: угловой подъем и опускание секции спины - от 0° до 60°; угол сгибания и разгибания секций бедро-голень -40°; подошвенное сгибание секции стопы от 90° до 130°, тыльное сгибание секции стопы - от 90° до 70°, боковые наклоны рамы ложа - от 0° до 20°, продольные наклоны рамы ложа - от 0° до 20; скорость углового движения до 0,5 град/с.
Устройство для управления системой предназначено для планирование лечения, создания, изменение, удаление программ и сценариев лечения, ведение статистики лечения пациента.
Устройство для управления системой содержит последовательно соединенные блок 133 ввода/вывода данных, блок 134 обработки и хранения программ реабилитации, блок 135 контроля программ реабилитации, блок 136 формирования команд управления, блок 137 интерфейсный и блок 138 коммутации. Второй выход блока 135 контроля программ реабилитации соединен с первым входом блока 134 обработки и хранения программ реабилитации. Выходная шина блока 138 коммутации соединена с управляющими входами актуаторов 9-16, выходы датчиков положения которых соединены с второй входной шиной блока 137 интерфейсного. Второй выход блока 137 соединен с вторым входом блока 134 обработки и хранения программ реабилитации, к первому входу которого подключен блок 133 ввода/вывода данных. Блок 139 приема/передачи программ управления связан двунаправленными каналами связи с вторым входом/выходом блока 134 обработки и хранения программ реабилитации и с сервером 140, который выполнен с возможностью накопления результатов реабилитации и выработки рекомендаций по программе реабилитации.
Заявляемая реабилитационная кинетическая система в составе реабилитационной кровати и устройства для управления системой предназначена для лечения обездвиженных больных методом импульсной кинетикотерапии доктора Вагина А.А. (см. Вагин А.А. Патофизиологическое обоснование применения постоянной длительной импульсной кинетикотерапии в лечении и реабилитации больных с последствиями спинальной травмы. Дис…. канд. мед. наук. СПб, 2010, 185 с), который заключается в круглосуточном непрерывном движении элементов функциональной кровати системы по заданному алгоритму, заданной продолжительности и цикличности лечения.
Реабилитационная кинетическая система функционирует следующим образом. В исходном положении рамы опущены и находятся в горизонтальном положении. С учетом роста пациента регулируют длину секций бедра и голени. Укладывают на секции ложа противопролежневый матрац, на котором размещают пациента с фиксацией стоп на секции стопы.
Введем понятие «программа реабилитации», под которой будем понимать последовательность управляющих команд для воздействий на сегменты тела человека с помощью соответствующих секций и рам кровати. Первоначально программа задается врачом для конкретного пациента, исходя из диагноза больного с указанием: последовательности изменения положений сегментов тела человека, значений углов и скорости подъема, экспозиции по времени между изменениями положения сегментов тела и всего тела человека.
Заявляемая реабилитационная кинетическая система обеспечивает все необходимые движения сегментов тела пациента для реализации метода лечения обездвиженных больных методом импульсной кинетикотерапии: угловой подъем спины с удержанием ее до окончания действия всего времени цикла, сгибание бедренных, коленных суставов, тыльное сгибание стоп, разгибание коленного сустава, прямая нога при этом поднята вверх, разгибание стоп в исходное положение, сгибание коленного сустава, разгибание коленного сустава, тазобедренного сустава и возвращение конечностей в исходное положение, возвращение туловища в исходное положение, поворот на правый бок, возвращение в исходное положение, поворот на левый бок и возвращение в исходное положение, подъем тела со стороны головы, возвращение в исходное положение, подъем тела со стороны стоп, возвращение в исходное положение.
Режим вертикального подъема ложа, обеспечиваемый механизмами регулирования кровати, является технологическим, и предназначен для удобства обслуживания пациента, а также для удобства проведения регламентных работ.
Программа реабилитации устанавливается с помощью блока 133 ввода/вывода данных и записывается в базу данных блока 134 с указанием данных о пациенте, диагнозе больного и других данных. В дальнейшем программа реабилитации может быть задана автоматически под конкретного больного, исходя из данных, накопленных в базе данных блока 134 по данной патологии или поступивших от сервера 140.
В блоке 135 контроля производится проверка данных на однозначность и корректность и проверка программы реабилитации на возможные ошибки, например недопустимые углы подъема, скорости подъема и другие.
Блок 136 формирования команд управления формирует последовательность команд по подъему и спуску секций кровати в соответствии с заданной программой реабилитации.
Все управляющие входы механизмов регулирования объединены в единую шину (командный интерфейс), который принимает на исполнение последовательность команд (программу реабилитации). Команды передаются на механизмы регулирования через блок 138 коммутации последовательно со строгой нумерацией команд. Блок коммутации содержит коммутаторы по числу механизмов регулирования, которые при поступлении команды меняют движение секции в противоположную сторону.
Команда подъема секций формируется в результате пересчета угла подъема секции в величину движения штока актуатора. При достижении штоком заданной позиции в актуаторе формируется ответная команда (сигнальный флаг), при получении которого в блоке накопления программ реабилитации начинается выполнение следующей команды.
По экстренному случаю для перевода секций в горизонтальное положение оператор с блока ввода вывода подает команду - экстренное выключение, при получении которой на шину управления подается последовательность команд, предусматривающих возвращение всех штоков в исходное положение. Перевод секций в горизонтальное положение возможен также в ручном режиме за счет последовательного вытягивание фиксаторов штоков в актуаторах, что приводит к быстрому переводу секций в горизонтальное положение.
Конструктивная реализация реабилитационной кинетической систем с указанной совокупностью существенных признаков не представляет конструктивно-технических, технологических трудностей, что позволяет сделать вывод о соответствии критерию "промышленная применимость".
Повышение надежности работы реабилитационной кровати обеспечивается применением простых и схожих по конструкции рычагов и шарнирных соединений в механизмах регулирования и использованием в них только одного типа актуатора.
Контроль программы реабилитации, а также накопление результатов реабилитационного лечения и выработка рекомендаций по программе реабилитации поступившего пациента на локальном или удаленном сервере, расширяют функциональные возможности системы, и обеспечивают повышение безопасности и надежности ее работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАБИЛИТАЦИОННОГО ЛЕЧЕНИЯ ОБЕЗДВИЖЕННОГО БОЛЬНОГО | 2010 |
|
RU2435560C2 |
| Многофункциональная кровать | 2018 |
|
RU2692898C1 |
| СПОСОБ РЕАБИЛИТАЦИОННОГО ЛЕЧЕНИЯ ОБЕЗДВИЖЕННОГО БОЛЬНОГО | 2007 |
|
RU2336857C1 |
| Медицинская кровать | 2018 |
|
RU2692896C1 |
| СПОСОБ ИМПУЛЬСНОЙ КИНЕТИКОТЕРАПИИ ОБЕЗДВИЖЕННЫХ БОЛЬНЫХ | 2011 |
|
RU2456973C1 |
| ФУНКЦИОНАЛЬНАЯ КРОВАТЬ | 2002 |
|
RU2231348C1 |
| КРОВАТЬ ФУНКЦИОНАЛЬНАЯ ГАЛЕБСКОГО 19 | 2019 |
|
RU2699008C1 |
| Многофункциональная медицинская кровать | 2021 |
|
RU2753199C1 |
| КРОВАТЬ МЕДИЦИНСКАЯ ФУНКЦИОНАЛЬНАЯ | 2007 |
|
RU2348391C1 |
| ИНТЕГРИРОВАННЫЙ РЕАБИЛИТАЦИОННЫЙ КОМПЛЕКС | 2019 |
|
RU2713076C1 |
Изобретение относится к медицинской технике, в частности к реабилитационным кроватям для размещения и обслуживания тяжелых больных и устройствам для их управления. Система состоит из реабилитационной кровати, содержащей раму 1 основания, раму 2 наклона и раму 3 ложа, и устройства 31 для управления системой. Рама 1 основания является опорой и установлена на четырех колесах 30. На раме 3 ложа смонтированы последовательно соединенные шарнирными соединениями 17, 18 и 19 секция 4 спины, секция 5 таза, секция 6 бедра и секция 7 голени. Секция 8 стопы установлена на секции 7 голени. Рама 2 наклона расположена между рамой 1 основания и рамой 3 ложа и предназначена для обеспечения латеральных наклонов рамы 2 наклона относительно рамы 1 основания и продольных наклонов рамы 3 ложа относительно рамы 2 наклона. Вся система рам и секций содержит восемь механизмов регулирования, которые содержат актуаторы 9-16 с элементами передачи движения в виде рычагов и шарниров. Система обеспечивает все необходимые движения сегментов тела пациента для реализации метода лечения обездвиженных больных методом импульсной кинетикотерапии по методу Вагина А.А. Система обладает расширенными функциональными возможностями по контролю программы реабилитации, накоплению результатов реабилитационного лечения и выработке рекомендаций по программе реабилитации поступившего пациента на локальном или удаленном сервере, повышенной безопасностью и надежностью ее работы. Изобретение позволяет повысить надежность работы системы. 2 н. и 11 з.п. ф-лы, 20 ил.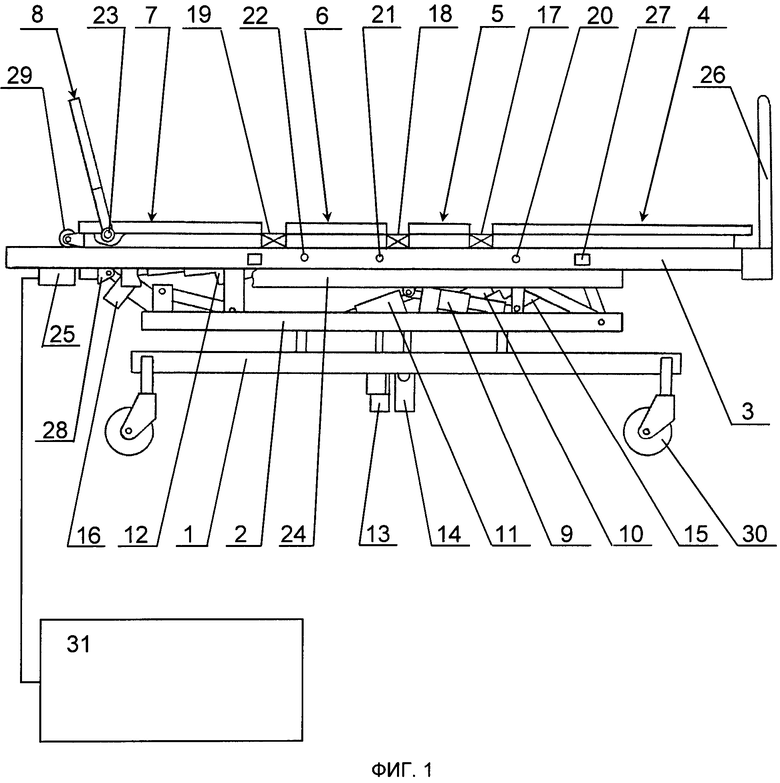
1. Реабилитационная кинетическая система, включающая реабилитационную кровать и устройство для управления системой, причем кровать содержит раму основания, установленную на колесах, раму ложа, которое включает последовательно соединенные шарнирами, по меньшей мере, секцию спины, секцию таза, секцию бедра и секцию голени, а также секцию стопы, причем секция таза соединена неподвижно с рамой ложа, а секция спины, секция бедра, секция голени и секция стопы имеют механизмы регулирования их наклона относительно рамы ложа, а устройство для управления системой содержит блок формирования команд для программного многократно повторяемого циклического позиционирования секций спины, таза, бедра, голени, стопы и рамы ложа, отличающаяся тем, что функциональная кровать снабжена рамой наклона, которая расположена между рамой основания и рамой ложа и снабжена механизмами регулирования латеральных наклонов рамы наклона относительно рамы основания и механизмами регулирования продольного наклона рамы ложа относительно рамы наклона, вся система рам и секций содержит восемь механизмов регулирования, каждый из которых содержит актуатор с элементами передачи движения в виде рычагов и шарниров, актуаторы секций спины, голени и бедра шарнирно соединены с опорами на раме секции таза, актуатор секции стопы - с опорой на подвижной рамке секции голени, актуаторы латеральных наклонов - с опорами на раме основания, актуатор наклона головной части рамы ложа - с опорой на раме ложа, актуатор наклона ножной части рамы ложа с опорой на раме наклона, оси рычагов секций спины, голени и бедра и наклона головной части рамы ложа закреплены на раме ложа, оси рычагов латеральных наклонов - на раме основания, оси рычага наклона ножной части рамы ложа - на раме наклона, плечи рычагов всех секций соединены шарнирно со штоками актуаторов, концы плеч рычагов секций спины и бедра установлены подвижно в направляющих, закрепленных на рамах секций спины и бедра соответственно, концы плеч рычага секции голени установлены подвижно в стойках на секции голени, концы плеч рычагов правого латерального наклона установлены подвижно в направляющих, закрепленных на раме наклона, концы плеч рычагов левого латерального наклона установлены подвижно в стойках, закрепленных на раме наклона, концы плеч рычагов наклона головной части рамы ложа установлены подвижно в стойках на раме наклона, концы плеч рычагов наклона ножной части рамы ложа установлены подвижно в направляющих на раме ложа, шарнирное соединение бедро - голень расположено на подвижной в продольном направлении каретке секции бедра с возможностью фиксации заданной длины секции бедра, секция стопы установлена на подвижной в продольном направлении рамке секции голени с возможностью фиксации заданной длины секции голени, а устройство для управления системой выполнено с возможностью дополнительного формирования команд управления для позиционирования рамы наклона относительно рамы основания и рамы ложа относительно рамы наклона, а также с возможностью накопления результатов реабилитационного лечения, выработки рекомендаций по программе реабилитации и их приема/передачи.
2. Система по п.1, отличающаяся тем, что рама основания содержит две продольные балки, торцевую поперечину, две внутренние поперечины, четыре кронштейна крепления опорных колес, две стойки с осевыми частями шарнирного соединения актуаторов правого и левого латеральных наклонов, четыре стойки с осями для установки вала рычага левого и правого латеральных наклонов.
3. Система по п.1, отличающаяся тем, что рама наклона содержит две продольные боковые балки, две внутренние продольных балки, две торцевые поперечины и первую и вторую внутренние поперечины корытообразной формы, две стойки для крепления концов плеч рычага левого латерального наклона и две направляющие для установки опорных роликов концов плеч рычага правого латерального наклона, при этом на первой внутренней поперечине рамы наклона установлена осевая часть шарнирного соединения актуатора наклона ножной части рамы ложа, а на концах продольных боковых балок со стороны головы расположены оси для установки вала рычага наклона ножной части рамы ложа.
4. Система по п.1, отличающаяся тем, что рама ложа содержит две продольные боковые балки, первую торцевую поперечину, вторую торцевую поперечину, внутреннюю поперечину, две продольные направляющие, закрепленные на первой и второй поперечинах, раму секции таза, неподвижно закрепленную на продольных боковых балках, на которых последовательно расположены оси вала рычага секции спины, оси вала рычага секции бедра, оси вала рычага секции голени, а на стойках - оси вала рычага наклона ножной части рамы ложа, на продольных боковых балках установлены также четыре кронштейна для установки бокового ограждения, на правой продольной боковой балке - труба разводки и кронштейн разъема.
5. Система по п.1, отличающаяся тем, что на раме таза установлены втулочные части шарнирных соединений секций спины - таза, втулочные части шарнирных соединений секций таза - голени, осевые части шарнирных соединений актуатора спины, актутора бедра и актуатора голени.
6. Система по п.1, отличающаяся тем, что рычаг секции спины содержит вал, плечо актуатора и два параллельных плеча секции спины, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч секции спины оканчиваются опорными роликами.
7. Система по п.1, отличающаяся тем, что рычаг секции бедра содержит вал, плечо актуатора и два параллельных плеча секции бедра, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч секции бедра оканчиваются опорными роликами.
8. Система по п.1, отличающаяся тем, что рычаг секции голени содержит вал, плечо актуатора секции голени, и два параллельных плеча секции голени, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча, при этом плечи секции голени выполнены с возможностью удлинения в продольном направлении.
9. Система по п.1, отличающаяся тем, что рычаг правого латерального наклона содержит вал, плечо актуатора правого наклона и два параллельных плеча правого наклона, которые закреплены на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч правого наклона оканчиваются опорными роликами.
10. Система по п.1, отличающаяся тем, что рычаг левого латерального наклона содержит вал, плечо актуатора левого наклона и два параллельных плеча левого наклона, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч левого наклона оканчиваются осями.
11. Система по п.1, отличающаяся тем, что рычаг наклона ножной части верхней рамы содержит вал, плечо актуатора наклона ножной части и два параллельных плеча наклона ножной части, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч наклона ножной части оканчиваются опорными роликами.
12. Система по п.1, отличающаяся тем, что рычаг наклона головной части верхней рамы содержит вал, плечо актуатора наклона головной части и два параллельных плеча наклона головной части, закрепленных на валу с разносом вдоль оси вала и поворотом относительно плеча актуатора, при этом концы плеч наклона головной части оканчиваются осями.
13. Устройство для управления системой, содержащее блок формирования команд управления, отличающееся тем, что в него введены блок ввода/вывода, последовательно соединенные блок обработки и хранения программ реабилитации и блок контроля программ реабилитации, последовательно соединенные блок интерфейсный и блок коммутации, а также блок приема/передачи программ управления и сервер, при этом вход/выход блока ввода/вывода соединен двухсторонней связью с входом/выходом блока обработки и хранения программ реабилитации, к первому входу которого подключен второй выход блока контроля программ реабилитации, выход блока контроля программ реабилитации соединен с входом блока формирования команд управления, выход которого соединен с первым входом блока интерфейсного, выходная шина блока коммутации соединена с управляющими входами актуаторов, выходы датчиков положения которых соединены с второй входной шиной блока интерфейсного, второй выход которого соединен с вторым входом блока обработки и хранения программ реабилитации, а блок приема/передачи программ управления связан двунаправленными каналами связи с вторым входом/выходом блока обработки и хранения программ реабилитации и с сервером, который выполнен с возможностью накопления результатов реабилитационного лечения и выработки рекомендаций по программе реабилитации.
| Устройство для измерения мощности, передаваемой вращающимся валом | 1946 |
|
SU87353A2 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ПАЦИЕНТА (ВАРИАНТЫ) И СПОСОБ ПОДДЕРЖАНИЯ ТЕЛА ЧЕЛОВЕКА НА МАТРАЦЕ | 1989 |
|
RU2128479C1 |
| Приспособление для определения длины кулиссного дышла у парораспределительных механизмов паровоза | 1928 |
|
SU9577A1 |
| US 6175920 B1, 16.01.2001. | |||

