Изобретение относится к области проведения работ по подъему затонувших объектов.
Известна система для подъема затонувших судов и других объектов, состоящая из понтона, снабженного опускаемыми дугообразными ковшами, на свободных концах которых расположены цепная пила и устройство для формирования высоконапорной струи воды, целью которых является размыв грунта под затонувшим судном. Процесс подъема заключается в позицировании ковшей относительно бортов затонувшего судна, размыв грунта под судном с одновременным движением ковшей до их соединения друг с другом, после чего наполняются газом множество емкостей, расположенных на внутренней поверхности ковшей, тем самым обеспечивая необходимую подъемную силу для отрыва от грунта и всплытия затонувшего судна к поверхности воды (патент США №3722448, кл. В 63 С 7/24, 1973 г.).
Недостатками являются малая величина достижимых глубин, невысокая нагрузочная способность.
Известен способ подъема затонувшего объекта посредством секционной, последовательно наращиваемой штанги, которая посекционно фиксируется на базовом судне и осуществляет грузозахватным приспособлением последней секции соединение с затонувшим объектом, после чего осуществляют посекционный подъем этой штанги с фиксацией ее на базовом судне при демонтаже очередной верхней секции и фиксацию поднятого затонувшего объекта на базовом судне, причем на секциях штанги при ее опускании закрепляются понтоны, которые последовательно заполняются водой при погружении штанги и затем продуваются при ее подъеме (патент РФ №2062732, МПК В 63 С 7/08, опубл. 27.06.1996 г.).
Система, реализующая известный способ, содержит базовое судно-катамаран с двумя вспомогательными понтонами в носовой и кормовой частях, подъемными механизмами, а также механизмом фиксации несущего органа. Несущий орган включает в себя штангу, состоящую из секций с нулевой плавучестью с возможностью их последовательного соединения. Со штангой связана траверса, выполненная с грузозахватным приспособлением (см. там же).
Известное техническое решение для подъема затонувших объектов является сложным по технической реализации и трудоемким. Кроме того, оно не может использоваться на больших глубинах в условиях ветровых и волновых нагрузок ввиду наличия колонны секционных штанг, которые трудно ориентировать для проведения работ над затонувшим объектом.
Наиболее близким к предложенному является способ подъема затонувшего объекта, заключающийся в управляемом с базового судна погружении многоотсечного судоподъемного понтона посредством заполнения отсеков, закреплении на затонувшем объекте грузоподъемных тросов с помощью водолазов и последующем всплытии понтона путем продувки его отсеков и буксировке затонувшего объекта (Молчанов В.А. Возвращение из глубин. - Л.: Судостроение, 1982, с.123 и 124).
Данный способ также неприемлем для больших глубин в связи с необходимостью использования труда водолазов. Кроме того, он является трудоемким и дорогим ввиду необходимости пробивки тоннелей под корпусом затонувшего объекта для проводки грузоподъемных тросов, необходимости привлечения большого количества судов обеспечения, таких как плавучий кран, дежурный буксир, водолазный бот. Большая зависимость от погодных условий (не >3 баллов) делает известный способ неудобным в эксплуатации.
Предложенное изобретение направлено на улучшение эксплуатационных характеристик процесса подъема затонувших объектов за счет уменьшения трудоемкости, автоматизации размыва грунта и проводки грузоподъемных тросов, возможности работы на больших глубинах и малой зависимости от погодных условий.
Поставленная задача достигается способом подъема затонувшего объекта, заключающимся в погружении многоотсечного понтона посредством заполнения отсеков забортной водой, ориентировании понтона относительно продольной оси затонувшего объекта, пробивке тоннелей в грунте под корпусом затонувшего объекта с последующей проводкой грузоподъемных тросов и закреплении их на понтоне, всплытии понтона путем продувки его отсеков и буксировке затонувшего объекта, в котором в отличие от прототипа осуществляют управляемое с базового судна последовательное заполнение отсеков с возможностью регулирования скорости погружения понтона на рабочую глубину, а проводку грузоподъемных тросов под корпусом затонувшего объекта осуществляют одновременно с пробивкой тоннелей с помощью управляемых гибких многозвенных манипуляторов, расположенных на одном из бортов понтона, путем размыва грунта и эжекции пульпы пропускаемой под давлением забортной водой через гибкий рукав, проходящий сквозь звенья манипулятора, а закрепление грузоподъемных тросов на другом борту понтона осуществляют автоматически посредством поиска крепежных узлов понтона последними подвижными звеньями манипуляторов с помощью устройств слежения.
Проводку грузоподъемных тросов под корпусом затонувшего объекта можно осуществлять одновременно с обоих бортов понтона с последующим их закреплением на других бортах.
Поставленная задача достигается также системой для подъема затонувших объектов, состоящей из базового судна с установленными на нем воздушным компрессором и системой энергоснабжения, погружаемого многоотсечного понтона с системами крепления грузоподъемных тросов и кабель-шланговой связки, соединяющей компрессор и систему энергоснабжения с погружаемым понтоном, в которой в отличие от прототипа погружаемый многоотсечный понтон оборудован системой локации для обнаружения затонувшего объекта и определения положения понтона относительно него, системой ориентирования с движителями для позиционирования понтона относительно затонувшего объекта и установленными на обоих бортах в шахматном порядке управляемыми гибкими многозвенными манипуляторами с закрепленными на них грузоподъемными тросами, причем каждый манипулятор выполнен в виде многозвенной сборки, каждое звено которой имеет возможность изгибаться в двух направлениях, а последнее звено, содержащее автоматическое сцепное устройство - в любом направлении, причем на концевой части последнего звена установлена система слежения, а также сопло гидропневмомонитора и эжектор, связанные через проходящий сквозь все звенья манипулятора гибкий рукав с установленным на базовом судне насосом для подачи под давлением забортной воды.
Известно использование гибких манипуляторов в различных отраслях промышленности (US 4494417, В 05 В 15/06, В 25 J 9/06, 22.01.1985 г.).
В предложенной совокупности существенных признаков способа и устройства использование многозвенных гибких манипуляторов обеспечивает новые свойства, позволяющие автоматизировать подъем затонувших объектов с больших глубин независимо от погодных условий.
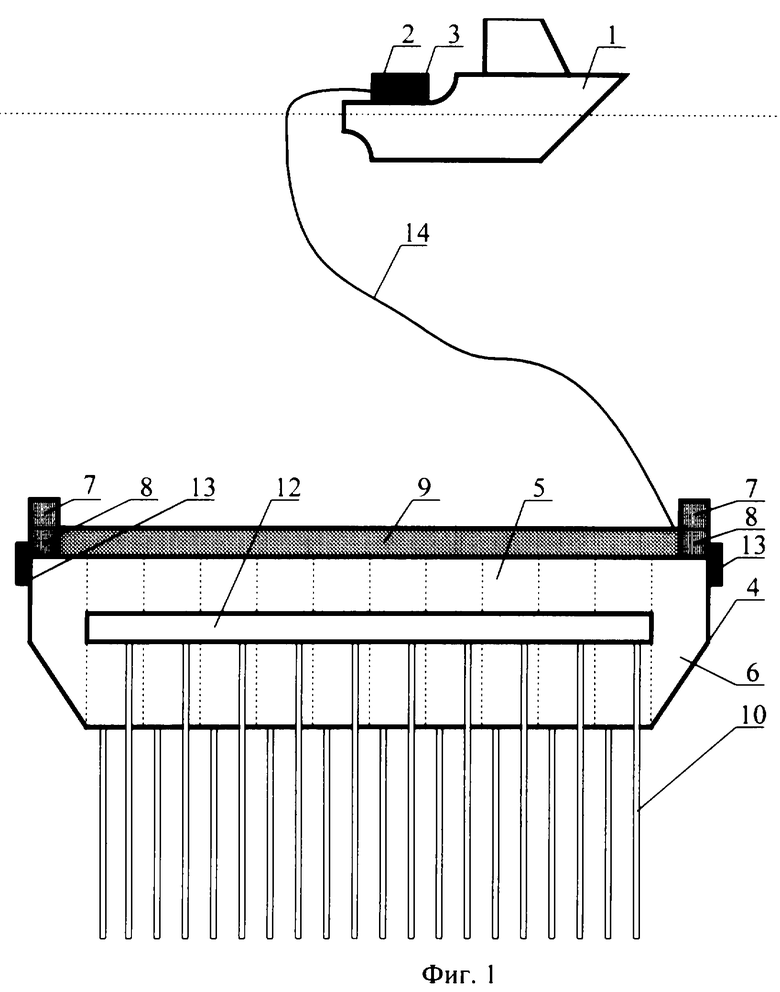
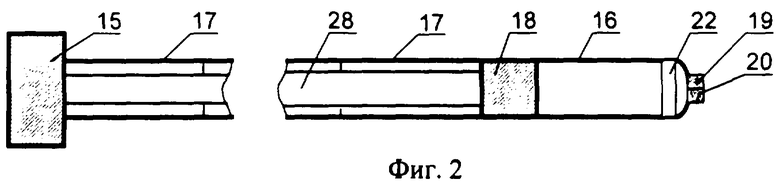
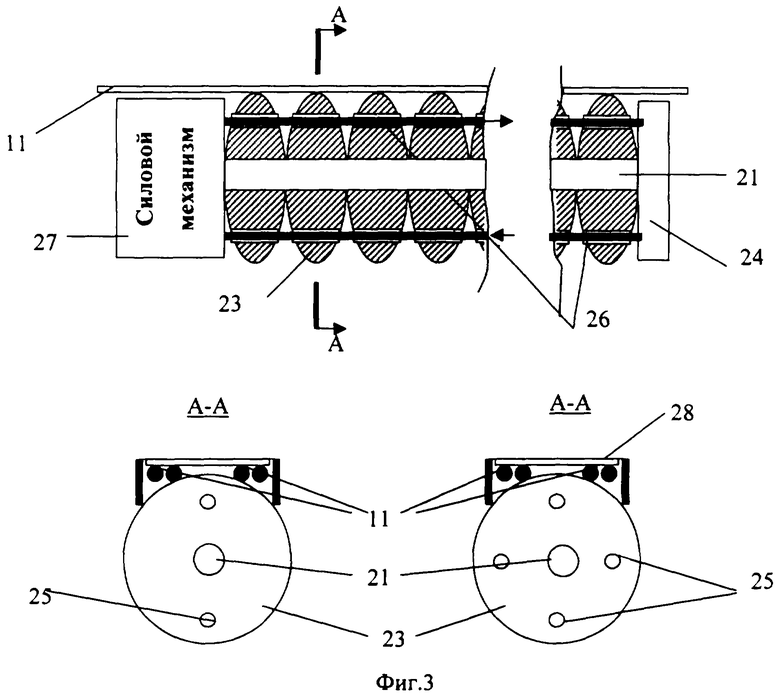
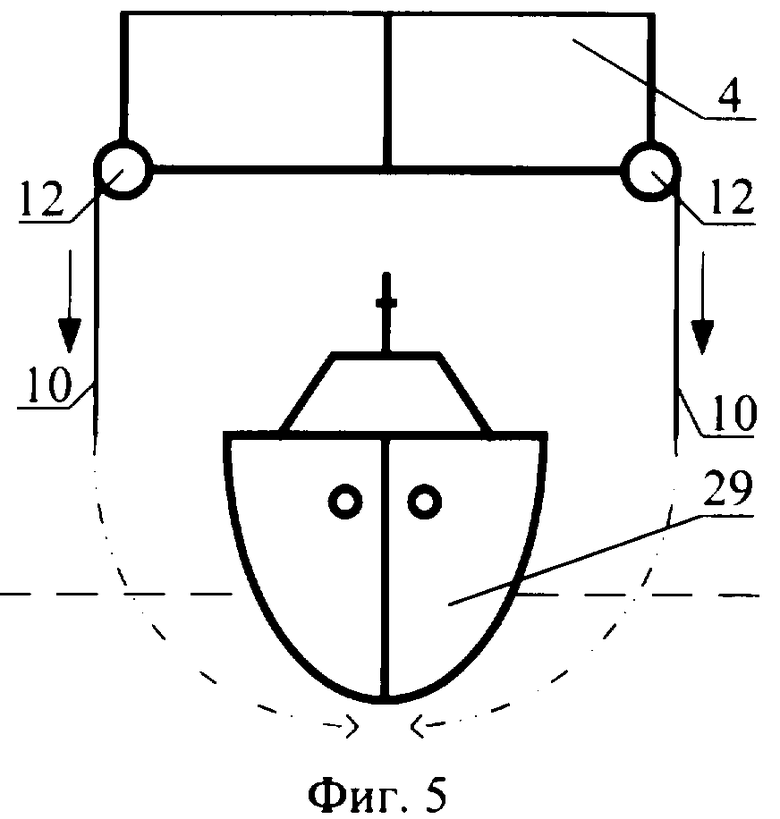
Сущность изобретения поясняется чертежами. На фиг.1 показана система для подъема затонувших объектов; на фиг.2 - гибкий многозвенный манипулятор; на фиг.3 - отдельное звено гибкого многозвенного манипулятора; на фиг.4, 5 - схемы проводки.
Система (фиг.1) для подъема затонувших объектов состоит из базового судна - буксира 1 с установленными на нем воздушным компрессором 2 и системой энергоснабжения 3, а также погружаемого много отсечного понтона 4. Погружаемый понтон, состоящий из отсеков 5, обеспечивающих необходимую грузоподъемность, и дифферентовочных отсеков 6, служащих для его выравнивания, оборудован системой локации 7 для обнаружения затонувшего объекта и определения положения понтона относительно его, движителями 8 системы ориентирования, обеспечивающими наиболее благоприятное позиционирование понтона относительно затонувшего объекта, системой продувки отсеков 9, многозвенными гибкими манипуляторами 10 с закрепленными на них грузоподъемными тросами 11, системами 12 крепления свободных концов грузоподъемных тросов к понтону, устройствами крепления буксировочных тросов 13. Для обеспечения связи, энергоснабжения и управления установленными на погружаемом понтоне устройствами он соединен с буксиром посредством кабель-шланговой связки 14.
Каждый манипулятор 10 (фиг.2, 3) выполнен в виде многозвенной сборки, крепящейся к понтону посредством механизма 15. Последнее звено 16 манипулятора обладает возможностью изгибаться в любом направлении (объемный изгиб), все остальные звенья 17 - только в двух направлениях (плоский изгиб). Закрепленные на манипуляторе грузоподъемные тросы 11 имеют на конце замковое устройство 18, посредством которого манипулятор крепится к системе крепления 12 погружаемого понтона. На концевой части последнего звена манипулятора расположены сопло гидромонитора 19 и эжектор 20, связанные через проходящий сквозь осевые отверстия 21 всех звеньев манипулятора гибкий рукав с насосом для подачи под давлением забортной воды. Кроме того, на концевой части последнего звена установлена система слежения 22 для контроля положения замкового устройства 18 относительно крепежного узла системы крепления 12 понтона.
Каждое из звеньев 16 и 17 манипулятора может быть выполнено аналогично гибкой руке манипулятора (US 4494417, В 05 В 15/06, опубл. 22.01.1985 г.) и состоит из чечевицеобразных сегментов 23 (фиг.3). Каждое звено заканчивается устройством крепления 24 следующего звена манипулятора. Для того, чтобы обеспечить жесткость конструкции и реализовать изгиб звеньев манипулятора в заданной плоскости, в чечевицеобразных сегментах выполнены отверстия 25 (по два в каждом сегменте для звеньев плоского изгиба или по четыре - для звеньев объемного изгиба), через которые проходят силовые тросы 26, определенный тип натяжения которых реализуется силовым механизмом 27. Силовой механизм звена манипулятора, натягивая один из тросов и в то же самое время ослабляя другой, вызывает изгиб звена в ту или другую сторону. Через сквозные осевые отверстия 21 всех сегментов проводятся кабели питания силовых механизмов каждого звена, каналы передачи информации от датчиков, гибкий шланг для подачи под давлением воды в гидромонитор 20.
Для уменьшения величины контактного давления и упрощения крепления к манипулятору грузоподъемные тросы 11 крепятся к опорной пластине 28.
Многозвенные манипуляторы расположены на понтоне в шахматном порядке, их количество определяется длиной корпуса затонувшего объекта, несущей способностью тросов.
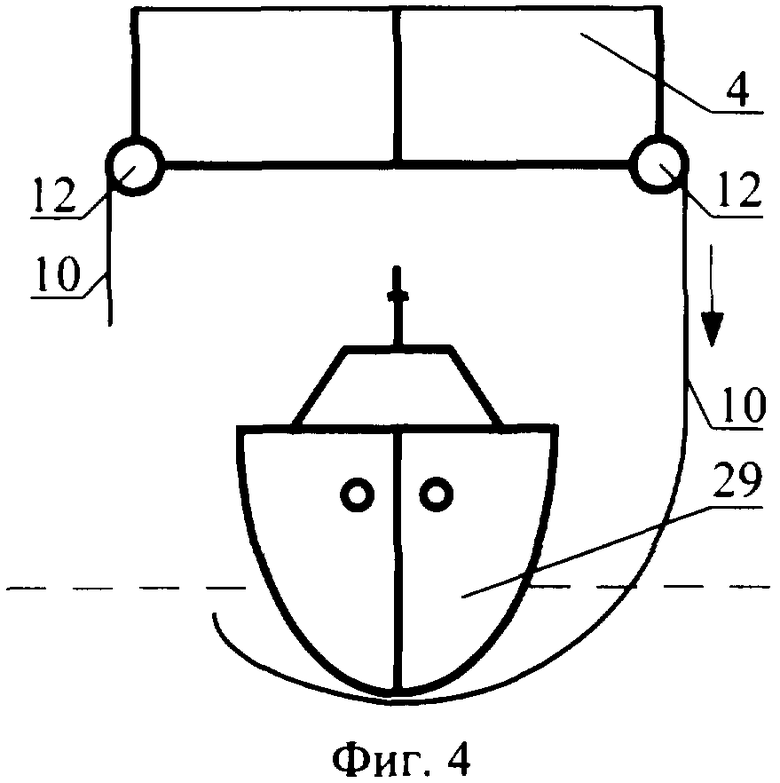
Подъем затонувшего объекта, например судна 29, осуществляют следующим образом.
Базовое судно 1 буксирует погружаемый понтон 4 к месту проведения подъемных работ - затонувшему объекту 29. Затем производят спуск многоотсечного понтона путем заполнения отсеков 5 и 6 забортной водой до глубины нахождения затонувшего объекта 29. При этом скорость погружения регулируют путем изменения скорости поступления забортной воды в отсеки понтона любыми известными методами, например, посредством регулирования сечения проходных отверстий (Молчанов В.А. Возвращение из глубин. - Л.: Судостроение, 1982, с.131 и 132). С помощью системы локации 7 на последнем участке погружения определяют расположение затонувшего объекта и относительное положение и ориентацию понтона, что в свою очередь является информацией для запуска движителей 8 системы ориентирования погружаемого понтона в автоматизированном и ручном режимах с целью совмещения продольных осей затонувшего объекта и понтона. После погружения понтона до глубины, определяемой длиной манипуляторов, манипуляторы 10 одной из сторон понтона (фиг.4) начинают размывать грунт под затонувшим объектом 29 и посредством управляемого собственного изгиба совместно с медленным погружением понтона 4 проводят под затонувшим объектом грузоподъемные тросы. После выхода тросов с другой стороны затонувшего объекта начинается этап их закрепления на понтоне, состоящий из дальнейшего погружения понтона, и поисковых движений последних звеньев манипуляторов, при этом последнее, наиболее подвижное звено 16 манипулятора, снабженное системой слежения 22, ищет замковым устройством 18 крепежный узел системы крепления 12 понтона, совершая движения в конусоподобном рабочем пространстве.
После закрепления всех грузоподъемных тросов 11, заведенных под затонувший объект 29 манипуляторами одного борта понтона, начинается этап заведения грузоподъемных тросов манипуляторами другого борта понтона 4. Отличие этого этапа состоит в том, что при проведении манипуляторов 10 используются только их степени подвижности без участия движения понтона.
Возможно также одновременное заведение под затонувший объект 29 манипуляторов 10 с обеих сторон погружаемого понтона 4 (фиг.5), если это позволяет характер донного грунта.
После закрепления всех грузоподъемных тросов начинается процесс подъема затонувшего объекта, заключающийся в продувке отсеков 5 понтона 4. Для дифферентовки в процессе подъема системы "понтон - затонувший объект" во время подъема используются специальные дифферентовочные отсеки 6, расположенные на оси понтона с разных концов. Выравнивание системы осуществляется путем продувки или заполнения этих отсеков.
После всплытия система "понтон - затонувший объект" крепится посредством устройства крепления 13 буксировочным тросом к базовому судну 1 и транспортируется к месту разделки или ремонта.
Таким образом, предложенное изобретение позволяет увеличить рабочие глубины, исключить водолазные работы, автоматизировать процессы размыва и уборки грунта, проводки и закрепления грузоподъемных тросов, что обеспечивает улучшение эксплуатационных характеристик процесса подъема затонувших объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЗОГЕНЕРАТОР ДЛЯ УСТРОЙСТВА СУДОПОДЪЕМА С БОЛЬШИХ ГЛУБИН, УСТРОЙСТВО СУДОПОДЪЕМА С БОЛЬШИХ ГЛУБИН И СПОСОБ СУДОПОДЪЕМА С БОЛЬШИХ ГЛУБИН | 2011 |
|
RU2476347C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1998 |
|
RU2200111C2 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2002 |
|
RU2229418C2 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 2005 |
|
RU2359861C2 |
| Плавучий кессон-завод | 1983 |
|
SU1188249A1 |
| НАДВОДНОЕ СУДНО ДЛЯ ОЧИСТКИ ОТ ГРЯЗНОЙ ЖИДКОСТИ | 1991 |
|
RU2035349C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312038C1 |
| СПОСОБ ПОДЪЁМА ПОДВОДНЫХ ЛОДОК | 2001 |
|
RU2228281C2 |
Способ подъема затонувшего объекта заключается в управляемом погружении многоотсечного понтона, пробивке тоннелей в грунте под корпусом затонувшего объекта с одновременной проводкой грузоподъемных тросов с помощью управляемых многозвенных манипуляторов, расположенных на одном из бортов понтона, автоматическом закреплении тросов на другом борту понтона и всплытии понтона путем продувки его отсеков. Система для реализации данного способа, кроме упомянутых устройств, содержит базовое судно с установленными на нем воздушным компрессором и системой энергоснабжения, а также кабель-шланговую связку для соединения этого судна с многоотсечным понтоном. Такое выполнение способа подъема и системы для его реализации обеспечивает улучшение эксплуатационных характеристик процесса подъема затонувших объектов за счет уменьшения трудоемкости, автоматизация размыва грунта и проводки грузоподъемных тросов. 2 с. и 1 з.п. ф-лы,5 ил.
| МОЛЧАНОВ В.А | |||
| Возвращение из глубин | |||
| - Л.: Судостроение, 1982, с.123-124 | |||
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2062732C1 |
| US 3722448 А, 27.03.1973 | |||
| US 4494417 A, 22.01.1985. | |||

