Изобpетение относится к охране внешней среды и областям техники, связанным с решением вопросов экологии моря или иных водоемов, с созданием технических средств, обеспечивающих экологически чистые способы подъема затонувших судов подводных лодок, танкеров и других загрязненных объектов.
Известно надводное судно для очистки от грязной жидкости преимущественно затонувшего объекта, содержащее цистерну для приема грязной жидкости.
Недостатком такого судна является невозможность дистанционного автоматического управления работами по очистке затонувшего объекта от грязной жидкости, что снижает эксплуатационные качества судна.
Цель изобретения повышение эксплуатационных качеств судна путем обеспечения возможности дистанционного автоматического управления работами по очистке затонувшего объекта от грязной жидкости.
Это достигается тем, что судно оснащено прочным опусканием с помощью лебедок и тросов на глубину отсеком с гибким шлангом, соединенным с ним одним концом снаружи через вентиль, имеющий кабель буксир для дистанционного управления работой этого вентиля, и системой насосов и трубопроводов для перекачки грязной жидкости из упомянутого отсека в указанную цистерну, а также самоходным глубоководным аппаратом, системой удержания надводного судна в заданной точке на поверхности акватории в процессе приема грязной жидкости, при этом система поиска выполнена с приборами гидролокации, магнитометрами и приборами обнаружения радиоактивности, расположенными на надводном судне, а также с приборами гидролокации, обнаружения источников гидроакустических сигналов, магнитных масс, радиоактивности и осветителями затонувшего объекта, размещенными на глубоководном аппарате, который снабжен гидроакустическими приемниками и передатчиками для связи с надводным судном, механическими руками-манипуляторами, содержащими шарнирно соединенные между собой рычаги с захватами на концах для доставки упомянутым аппаратом другого свободного конца указанного шланга к затонувшему объекту и подачи его внутрь этого объекта, при этом система удержания надводного судна выполнена с системой якорей, гидроакустическими буями, имеющими возможность размещения вблизи затонувшего объекта, и с установленными на борту надводного судна приемниками-пеленгаторами сигналов этих буев, а также с носовыми и кормовыми движителями и ЭВМ для пpиема координат расположения этих буев и управления работой движителей.
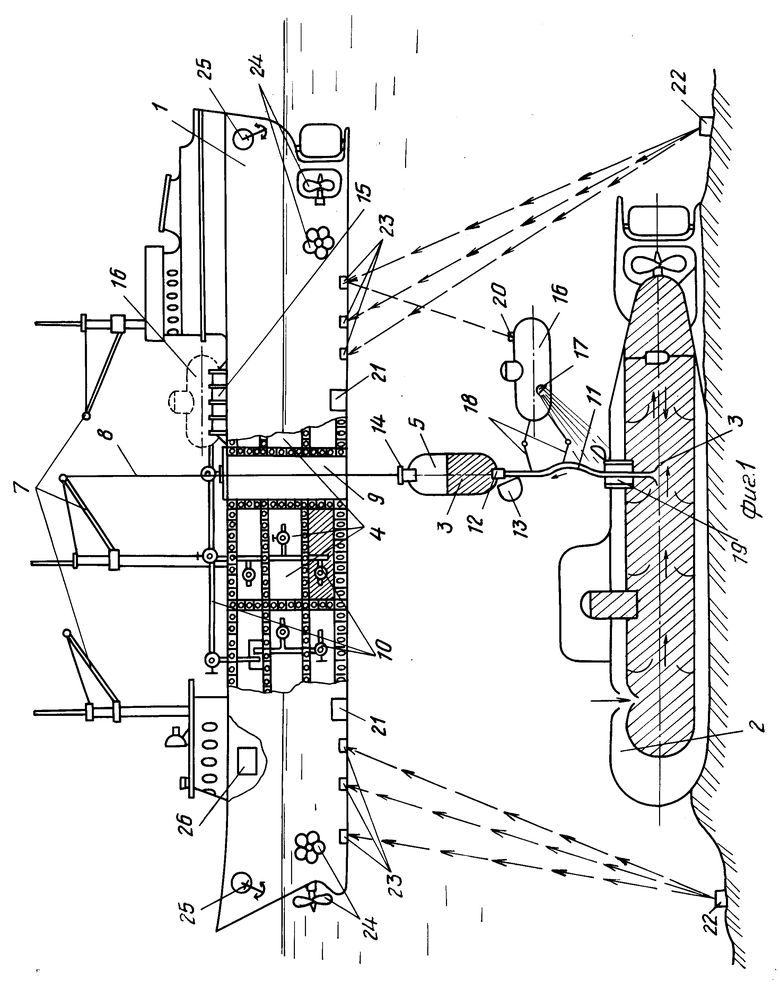
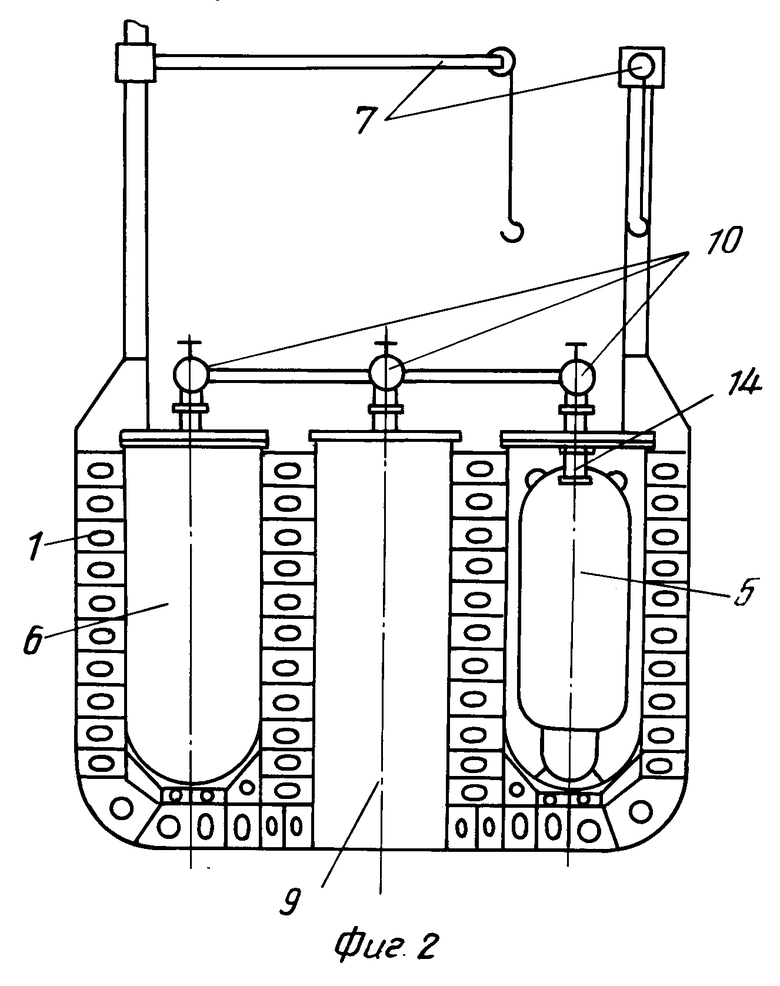
На фиг. 1 показано надводное судно для очистки затонувшего объекта от грязной жидкости и сам затонувший объект; на фиг.2 поперечный разрез корпуса надводного судна.
Корпус надводного судна 1 для очистки затонувшего объекта 2 от грязной жидкости 3 состоит из функциональных отсеков и стационарных грузовых отсеков 4, предназначенных для приема и транспортировки грязной жидкости. На судне имеются также съемные погружаемые грузовые отсеки 5, размещенные в специальных нишах 6, грузовые стрелы 7 с лебедками и тросами 8 для подъема и спуска отсеков 5 через шахту 9, система трубопроводов 10 с клапанами, вентилями и насосами для перекачки грязной жидкости из отсека в отсек и откачки в базовые хранилища.
Съемные грузовые отсеки 5 снабжены каждый гибким шлангом 11, соединенным одним концом с отсеком через дистанционно открываемый и закрываемый вентиль 12 и размещенным в контейнере 13 на корпусе отсека, а также патрубком 14 с клапаном для подсоединения к трубопроводу 10.
Судно оснащено установленным на специальном штатном основании 15 самоходным глубоководным аппаратом 16, имеющим осветители 17, манипуляторы 18 и предназначенным для поиска и осмотра затонувшего объекта, доставки к нему гибкого шланга 11 и заводки шланга внутрь объекта через отверстие 19 в корпусе объекта. Кроме того, судно оборудовано системой 20 связи с глубоководным аппаратом, бортовой системой 21 поиска затонувшего объекта, автоматической системой удержания судна в заданной точке, включающей в себя гидроакустические буи 22, приемники-пеленгаторы 23 сигналов буев, движители 24, якоря 25, и управляющей этой системой ЭВМ 26.
Операция по очистке от грязной жидкости затонувшего объекта выполняется в следующей последовательности.
Надводное судно 1 с помощью бортовой системы 21 производит поиск затонувшего объекта 2, фиксирует его положение на грунте гидроакустическими буями 22, становится над ним в рабочее положение, маневрируя движителями 24 по командам ЭВМ 26, выдаваемым на основании обработки данных, получаемых приемниками-пеленгаторами 23 с буев 22, и отдает якоря 25. В процессе операции положение судна автоматически корректируется системой удержания, управляемой ЭВМ 26.
Со штатного основания 15 на борту судна грузовыми стрелками 7 с лебедками и тросами 8 снимается и опускается на воду самоходный глубоководный аппарат 16, тросы 8 отдаются и аппарат погружается. Погрузившись, аппарат 16 уточняет местоположение и состояние объекта 2, производит поиск наиболее допустимых отверстий 19 на корпусе объекта, сообщает полученную информацию на танкер с помощью системы 20 и докладывает о готовности к операции.
На борту судна по команде из центра управления из одной из ниш 6 извлекается с помощью стрел 7 и тросов 8 съемный отсек 5, через шахту 9 погружается на заданную глубину и в нем открывается контейнер 13.
Глубоководный аппарат, используя осветители 17, с помощью манипуляторов 18 захватывает гибкий шланг 11, вытягивает его из контейнера 13, заводит свободный конец шланга в отверстие 19 на корпусе объекта и подает внутрь объекта.
После сообщения аппарата 16 о завершении заводки шланга 11 по команде из центра управления открывается вентиль 12 и грязная жидкость начинает поступать в грузовой отсек 5. Когда отсек заполняется, вентиль 12 закрывается, шланг 11 извлекается из объекта, укладывается в контейнер 13, после чего грузовой отсек поднимается на борт судна, заводится в нишу 6 и через патрубок 14 подсоединяется к трубопроводу 10, начинается откачка грязной жидкости в стационарные грузовые отсеки 4. Одновременно проводится операция по спуску другого отсека 5.
После завершения очистки затонувшего объекта или после заполнения грузовых отсеков судна грязной жидкостью глубоководный аппарат 16 всплывает и поднимается с помощью стрел 7 на штатное основание 15. Судно 1 направляется на базу, где подключает трубопроводы 10 к береговым системам и производит откачку грязной жидкости из своих грузовых отсеков в базовые емкости.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДВОДНОЕ СУДНО ДЛЯ ОЧИСТКИ ОТ РАДИОАКТИВНОЙ ЖИДКОСТИ | 1992 |
|
RU2057047C1 |
| ПОДВОДНЫЙ ТАНКЕР | 1993 |
|
RU2062731C1 |
| ПОДВОДНЫЙ ТАНКЕР ДЛЯ ОЧИСТКИ ОТ РАДИОАКТИВНОЙ ЖИДКОСТИ | 1992 |
|
RU2032589C1 |
| СПОСОБ ОЧИСТКИ ЗАТОНУВШЕГО ОБЪЕКТА | 1991 |
|
RU2006422C1 |
| БЫСТРОХОДНОЕ СПАСАТЕЛЬНОЕ СУДНО | 2023 |
|
RU2798921C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Глубоководное спасательное судно для подъема затонувших объектов | 1990 |
|
SU1796544A1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| МОГИЛЬНИК ДЛЯ ЗАТОНУВШЕЙ АТОМНОЙ ПОДВОДНОЙ ЛОДКИ | 1994 |
|
RU2081464C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1995 |
|
RU2111890C1 |
Использование: охрана внешней среды и в областях техники, связанных с решением вопросов экологии моря или иных водоемов. Сущность изобретения: устройство оснащено прочным опускаемым с помощью лебедок и тросов на глубину отсеком с гибким шлангом, соединенным с ним одним концом снаружи через вентиль, имеющий кабель-буксир для дистанционного управления работой этого вентиля, и системой насосов и трубопроводов для перекачки грязной жидкости из отсека в цистерну, а также самоходным глубоководным аппаратом, системой поиска затонувшего объекта и автоматической системой удержания надводного судна в заданной точке на поверхности акватории в процессе приема грязной жидкости. Глубоководный аппарат снабжен гидроакустическими приемниками и передатчиками для связи с надводным судном, а также механическими руками-манипуляторами. Система удержания надводного судна выполнена с системой якорей и гидроакустическими буями, а также с установленными на борту надводного судна приемниками-пеленгаторами сигналов этих буев, носовыми и кормовыми движителями и ЭВМ для приема координат расположения этих буев и управления работой движителей судна. 2 ил.
НАДВОДНОЕ СУДНО ДЛЯ ОЧИСТКИ ОТ ГРЯЗНОЙ ЖИДКОСТИ преимущественно затонувшего объекта, содержащее цистерну для приема грязной жидкости, отличающееся тем, что оно оснащено прочным опускаемым с помощью лебедок и тросов на глубину отсеком с гибким шлангом, соединенным с ним одним концом снаружи через вентиль, имеющий кабель-буксир для дистанционного управления работой этого вентиля, и системой насосов и трубопроводов для перекачки грязной жидкости из упомянутого отсека в указанную цистерну, а также самоходным глубоководным аппаратом, системой поиска затонувшего объекта и автоматической системой удержания надводного судна в заданной точке на поверхности акватории в процессе приема грязной жидкости, при этом упомянутая система поиска выполнена с приборами гидролокации, магнитометрами и приборами обнаружения радиоактивности, расположенными на надводном судне, а также с приборами гидролокации, обнаружения источников гидроакустических сигналов, магнитных масс, радиоактивности и осветлителями затонувшего объекта, размещенными на указанном глубоководном аппарате, который снабжен гидроакустическими приемниками и передатчиками для связи с надводным судном, механическими руками-манипуляторами, содержащими шарнирно соединенные между собой рычаги с захватами на концах для доставки упомянутым аппаратом другого свободного конца указанного шланга к затонувшему объекту и подачи его внутрь этого объекта, при этом упомянутая система удержания надводного судна выполнена с системой якорей и гидроакустическими буями, имеющими возможность размещения вблизи затонувшего объекта и с установленными на борту надводного судна приемниками-пеленгаторами сигналов этих буев, а также с носовыми и кормовыми движителями и ЭВМ для приема координат расположения этих буев и управения работой указанных движителей.
| Патент США N 4307769, кл | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
