Изобретение относится компенсационным устройствам систем трубопроводов, преимущественно к обвязкам газонефтеперекачивающих станций.
Известен выбираемый в качестве аналога компенсатор сдвиговых перемещений (см. каталог фирмы WITZENMAN GmbH Metallschlauck - Fabrik Pforzheim (Order no 456 1973 edition HYDRA Handbook Expansion Joints); патент ФРГ №2903570, МКИ F 16 L 27/02, опубликован 08.05.80, заявка от 31.01.1979; каталог фирмы HAWIKO Kompensatoren - und Apparatebau GmbH and Co, KG фиг.50), содержащий два сильфона с концевыми фланцевыми элементами и тяги, при этом тяги соединены с концевыми фланцевыми элементами через шарнирные пары трения.
Причиной, препятствующей использованию известных компенсаторов, являются значительные жесткость и, соответственно, перестановочные усилия при компенсационных перемещениях. В реальных условиях применения (обвязки газонефтеперекачивающих станций) при требуемых параметрах (Ду 400-1000 мм и Ру 7,5 МПа) в трубопроводах возникают значительные распорные усилия (1200-6000 кН), при этом перестановочные усилия компенсаторов, являясь функцией распорного усилия, при использовании в тягах пар трения также значительны (от 120-600 до 60-300 кН при условии выполнения определенных мероприятий по снижению коэффициента трения в шарнирных парах). Известные компенсаторы находят применение в условиях статических перемещений трубопроводов, но для защиты агрегатов в условиях динамических воздействий требуются компенсаторы малой жесткости. В реальных условиях при номинальной мощности агрегата в 2500 кВт создаются значительные динамические нагрузки, при этом насосный агрегат может быть установлен на амортизаторах. Развязка агрегата с трубопроводом с помощью компенсатора требует обеспечения компенсационных перемещений не только сдвига по всей плоскости, но и поворотных перемещений. Конструкция аналогов построена на принципе двухплоскостного параллелограмма, который обеспечивает только сдвиговые перемещения, не допуская угловых (поворотных перемещений).
Наиболее близким по технической сущности и совокупности признаков к заявляемому объекту является Pipe Compensator (Компенсатор для труб), Акцептованная заявка Великобритании №1450555, заявлено 29.11.1973, опубликовано 22.09.1976. Приоритет Швейцария, конвенционная заявка №17406 / 72 от 29.11.1972, МКИ F 16 L 51/00, 51/02, 51/04, НКИ F2G 5А 5В 6F, включающий сильфоны с концевыми фланцами и тяги в виде плоских направляющих, жестко закрепленных на концевых фланцах и расположенных вдоль оси сильфона. В варианте исполнения для обеспечения компенсационных перемещений по всей плоскости сдвига компенсатор содержит, по крайней мере, три соединительных тяги (стержня), при этом тяги выполнены круглыми в поперечном сечении и равномерно расположены по окружности.
В известном компенсаторе решается задача снижения жесткости компенсатора и, соответственно, перестановочного усилия на механизмы и трубопровод от воздействия динамических и статических нагружений сдвига только строго в одном направлении, перпендикулярном плоскости плоских тяг (направляющих). Известный компенсатор, выбранный в качестве прототипа, не обеспечивает перемещений по всей плоскости сдвига, т.к. конструкция прототипа выполнена в виде одноплоскостного параллелограмма.
Прототипом предусмотрено решение задачи обеспечения сдвига по всей плоскости путем использования круглых тяг (стержней), работающих в упругой области. Изгибная жесткость круглых тяг выше изгибной жесткости плоских тяг, и, соответственно, усилие, передающееся на механизмы, больше. Кроме того, конструкция прототипа построена на принципе упругого параллелограмма, который обеспечивает только сдвиговые перемещения в плоскости при невозможности компенсировать угловые перемещения.
Задача - создание компенсатора сдвигово-поворотных перемещений малой жесткости при обеспечении перемещений по всей плоскости сдвига, а также выполнение компенсатором поворотных (угловых) перемещений.
В компенсаторе сдвигово-поворотных перемещений малой жесткости, содержащем сильфон(ы) с концевыми фланцами и тяги, в виде плоских направляющих, расположенных вдоль оси сильфона(ов) и жестко закрепленных одними концами на концевых фланцах, согласно предлагаемому решению, установлены две пары упругих плоских направляющих в двух взаимно перпендикулярных плоскостях, а между сильфоном(ами) и плоскими направляющими дополнительно введен жесткий соединительный элемент, выполненный в виде катушки, к кольцам которой жестко попарно закреплены другие концы пар плоских направляющих. Вместе с тем, сильфон(ы) взаимодействуют с концевыми фланцами через сферические опоры.
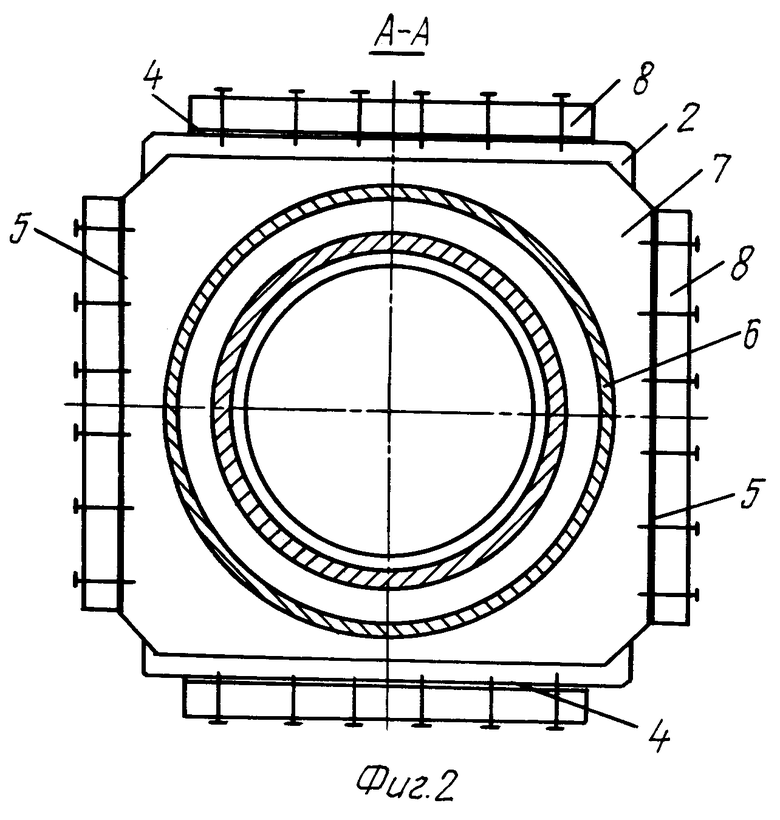
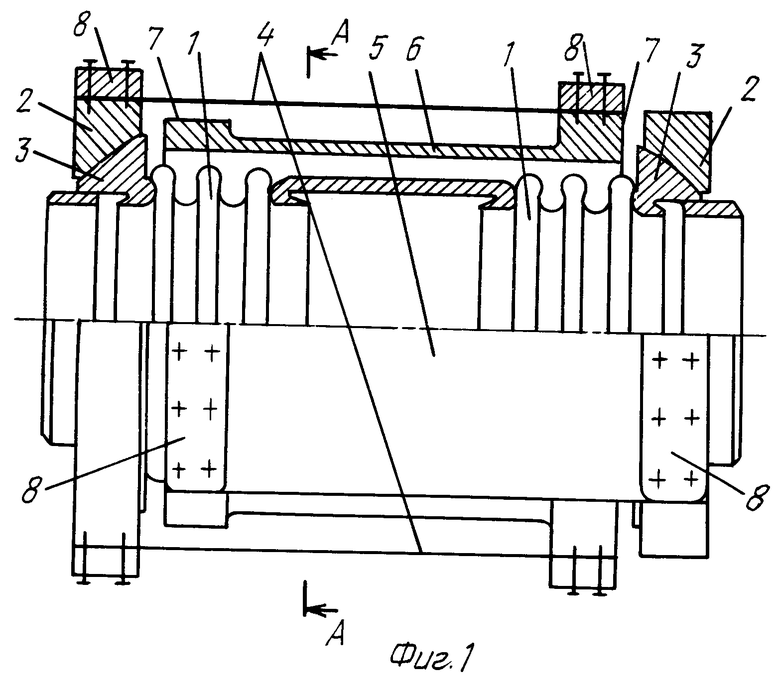
Компенсатор сдвигово-поворотных перемещений малой жесткости поясняется чертежами, где на фиг.1 представлен продольный разрез компенсатора, на фиг.2 - поперечный разрез компенсатора.
Компенсатор сдвигово-поворотных перемещений малой жесткости включает в себя сильфоны 1, взаимодействующие с концевыми фланцами 2 через сферические опоры 3, первую пару плоских направляющих 4 и расположенную перпендикулярно к ней вторую пару плоских направляющих 5. Между сильфонами и плоскими направляющими расположен жесткий соединительный элемент в виде катушки 6 с кольцами 7 для крепления плоских направляющих с помощью планок 8. Такими же планками 8 противоположные концы плоских направляющих 4 и 5 закреплены на концевых фланцах 2.
Сравнение жесткостных характеристик прототипа и предлагаемого решения с учетом обеспечения перемещений по всей плоскости сдвига подтверждается следующим рассмотрением.
Введем граничные условия:
- Задаемся равенством растягивающих напряжений в тягах компенсаторов, возникающих от действия распорного усилия.
- Задаемся равенством изгибной жесткости прототипа и предлагаемого решения.
- Для обеспечения перемещений по всей плоскости сдвига конструкция прототипа содержит как минимум три тяги круглого поперечного сечения, равномерно расположенных по окружности. Предлагаемая конструкция содержит две пары плоских тяг прямоугольного сечения, расположенных в двух взаимно перпендикулярных плоскостях.
Растягивающие напряжения в тягах

где Q - распорное усилие компенсатора;
F - площадь поперечного сечения тяг.
C учетом граничных условий площади поперечных сечений тяг должны быть равны Fкругл=Fплоск,
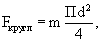
где m - количество стержней круглого сечения;
d - диаметр круглого сечения;
Fплоск=nbh,
где n=2 - количество плоских тяг, воспринимающих распорное усилие Q;
b - ширина плоской тяги;
h - высота плоской тяги,
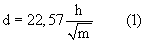
применимо соотношение

тогда
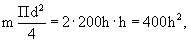
отсюда
Изгибная жесткость C=EJ, где Е - модуль упругости;J - момент инерции сечения,
Jкругл=m×0,05d4,
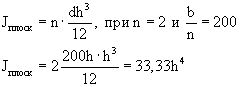
При одинаковом материале тяг
Jкругл=Jплоск; m×0,05d4 или md4=666,6h4. (2)
Подставим значения d из (1) в (2), тогда

отсюда m=389,3 шт.,
т.е. при теоретическом равенстве изгибной жесткости прототипа и предлагаемого решения необходимо использовать 390 шт. тяг круглого сечения диаметром (например, при h=3 мм) d=3,43 мм.
В случае применения трех тяг круглого сечения (m=3), как указано в прототипе, отношение изгибных жесткостей составит
Таким образом, изгибная жесткость конструкции, выполненной по прототипу, а, соответственно, и перестановочное усилие в 130 раз больше, чем в предлагаемом решении. При 100 шт. тяг круглого сечения изгибная жесткость прототипа в 4 раза больше, чем в предлагаемом решении, при 200 шт. - в 2 раза и при 390 тягах круглого сечения изгибная жесткость прототипа равна изгибной жесткости предлагаемой конструкции.
Конструкция компенсатора с использованием 390 тяг потребует увеличения радиальных размеров более чем в 2 раза, т.к. необходимо обеспечить не только размещение 390 тяг, причем равномерно, но и обеспечить размещение устройств их крепления. При этом значительно увеличится масса концевых фланцев, что потребует специальных устройств ее разгрузки для обеспечения работоспособности конструкции при условии ее малой жесткости.
Сомнительность существования конструкции компенсатора с использованием 390 шт. тяг или даже 100 шт. подтверждается:
- невозможностью обеспечения абсолютно одинаковых физико-механических свойств 390 шт. тяг,
- невозможностью обеспечения абсолютно одинаковых геометрических размеров (допуск на диаметр) 390 шт. тяг,
- невозможностью обеспечения абсолютно одинакового момента затяжки при фиксации 390 шт. тяг.
Указанные факторы приводят к неодинаковым деформациям и, соответственно, к разным напряжениям в 390 тягах при воздействии распорного усилия. В условиях рабочих статических и особенно динамических нагрузок (вибрация и удар) при выполнении компенсатором компенсационных перемещений (сдвиговых) наиболее напряженные тяги, получив дополнительные напряжения от динамических нагрузок, могут быть перегружены. При этом возможный выход из строя одной тяги приведет к увеличению неравномерности распределения нагрузок, а затем к “цепной реакции” выхода из строя тяг.
В условиях реальности угловых компенсационных перемещений, даже весьма незначительных при работе компенсаторов в системах обвязки нефтеперекачивающих станций, часть тяг получит дополнительные напряжения растяжения, а часть разгрузятся, что приведет к дальнейшей неравномерности распределения нагрузок по тягам и возможному выходу из строя наиболее нагруженных тяг.
Преимущество предлагаемого технического решения с использованием двух пар взаимно перпендикулярных плоских тяг очевидно.
Взаимодействие наружных концов сильфона(ов) с концевыми фланцами через сферические опоры позволяет компенсатору самоустанавливаться при монтаже в систему, не вызывая при этом дополнительных напряжений в элементах конструкции, а также обеспечить необходимые угловые компенсационные перемещения статического характера, не вызывая неравномерности напряжений в тягах и, соответственно, их перегрузку. Таким образом, расширяются возможности использования предлагаемого компенсатора, как сдвигово-поворотного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАТОР СДВИГОВО-ПОВОРОТНЫХ ПЕРЕМЕЩЕНИЙ | 2002 |
|
RU2224168C1 |
| КОМПЕНСАТОР СДВИГОВО-ПОВОРОТНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2293903C1 |
| КОМПЕНСАТОР СДВИГОВО-ПОВОРОТНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2293902C2 |
| СИЛЬФОННЫЙ КОМПЕНСАТОР СДВИГОВЫХ И УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 2002 |
|
RU2249750C2 |
| СИЛЬФОННОЕ КОМПЕНСИРУЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2396480C1 |
| РАЗГРУЖЕННЫЙ СИЛЬФОННЫЙ КОМПЕНСАТОР | 1995 |
|
RU2084749C1 |
| СДВИГОВЫЙ СИЛЬФОННЫЙ КОМПЕНСАТОР | 1996 |
|
RU2103589C1 |
| КОМПЕНСАТОР (ВАРИАНТЫ) | 2007 |
|
RU2372546C2 |
| УПЛОТНИТЕЛЬНЫЙ УЗЕЛ КОМПЕНСИРУЮЩЕГО РАСТРУБНОГО ПАТРУБКА | 1991 |
|
RU2035653C1 |
| СПОСОБ ИСПЫТАНИЙ СИЛЬФОННЫХ КОМПЕНСАТОРОВ | 2008 |
|
RU2367829C1 |
Изобретение относится к строительству и используется при сооружении и эксплуатации трубопроводов для компенсации сдвигово-поворотных перемещений элементов трубопроводов с большими условными проходами и с высоким давлением перекачиваемой среды. Компенсатор содержит сильфоны с концевыми фланцами, тяги в виде плоских расположенных вдоль оси сильфонов направляющих, жестко закрепленных концами на фланцах. Две пары упругих плоских направляющих установлены в двух взаимно перпендикулярных плоскостях, а между сильфонами и плоскими направляющими дополнительно введен жесткий соединительный элемент в виде катушки, с кольцами которой попарно жестко скреплены другие концы плоских направляющих. Обеспечиваются компенсационные перемещения во всех направлениях плоскости сдвига и любых по направлению угловых поворотах элементов трубопровода. Расширяет арсенал технических средств. 1 з.п. ф-лы, 2 ил.
| GB 1450555 А, 22.09.1976 | |||
| КОМПЕНСАТОР ПЕРЕМЕЩЕНИЙ ТРУБОПРОВОДА | 1998 |
|
RU2146786C1 |
| Способ моделирования паркинсонического синдрома | 1985 |
|
SU1298793A1 |
| 1972 |
|
SU414455A1 | |
| Устройство для размагничивания пульпы ферромагнитных материалов с различной коэрцитивной силой | 1973 |
|
SU546373A1 |

