Изобретение относится к способу устранения детонационных стуков в двигателе внутреннего сгорания (ДВС) при его работе в динамическом режиме с использованием устройства сбора и предварительной обработки данных, с помощью которого определяют по меньшей мере один рабочий параметр ДВС, блока управления, с помощью которого в зависимости по меньшей мере от одного измеренного рабочего параметра рассчитывают угол опережения зажигания, соответственно момент зажигания с учетом в динамическом режиме величины упреждения динамического изменения нагрузки, устройства выявления детонационных стуков, с помощью которого определяют интенсивность детонационных стуков, и устройства обнаружения динамических режимов, с помощью которого распознают переход ДВС на динамический режим работы, при этом на основании по меньшей мере одного рабочего параметра ДВС с помощью блока управления рассчитывают величину пропорционального нагрузке фактического сигнала, величину пропорционального нагрузке будущего сигнала, а также разность значений нагрузки, вычисляемую по разности указанных величин фактического и будущего пропорциональных нагрузке сигналов, и в зависимости от указанной разности значений нагрузки определяют величину упреждения динамического изменения нагрузки путем выборки этой величины упреждения динамического изменения нагрузки по хранящейся в памяти блока управления многопараметровой характеристике, при этом содержащиеся в этой многопараметровой характеристике значения соответствуют определенным диапазонам разности нагрузок, а величину упреждения динамического изменения нагрузки каждый раз считывают из той области многопараметровой характеристики, в которой диапазон разности нагрузок соответствует фактической разности значений нагрузки.
Ниже настоящее изобретение и лежащая в его основе проблематика, несмотря на возможность его применения в любых двигателях внутреннего сгорания, рассматриваются применительно к ДВС транспортного средства.
Устройство и способ устранения детонационных стуков в ДВС известно из DE 3420465 C2. В таких известных устройстве и способе определяются рабочие параметры ДВС и на основании этих измеренных рабочих параметров в блоке управления рассчитываются соответствующие регулирующие воздействия для управления прежде всего такими процессами, как зажигание и впрыскивание топлива. Таким путем, например, на основании данных о частоте вращения и приложенной нагрузке рассчитывается оптимальный момент зажигания.
Кроме того, в известном устройстве предусмотрен датчик детонационного сгорания, который регистрирует отдельно в каждом цилиндре шумы, создаваемые в процессе сгорания. Сигналы от этого датчика детонационного сгорания подаются далее в схему обработки сигналов детонационных стуков, где после отфильтровывания фоновых шумов эти сигналы сравниваются с некоторым эталонным уровнем детонационных стуков. При обнаружении детонационного сгорания в одном из цилиндров момент зажигания в этом цилиндре, определенный на основании частоты вращения и нагрузки, изменяется для устранения детонации в сторону позднего и тем самым смещается от границы детонации. По истечении заданного количества циклов бездетонационного сгорания указанный измененный в сторону позднего момент зажигания постепенно возвращается к рассчитанному блоком управления заданному значению. Поскольку у холодного, т.е. не прогретого, двигателя опасность возникновения детонационного сгорания отсутствует, система регулирования по детонации обычно активизируется лишь по достижении двигателем заданной температуры, т.е. после его прогрева. Ниже указанной температуры включения системы регулирования по детонации возникновение детонации исключено, поскольку преобладающие в камере сгорания термические условия не допускают детонационного сгорания.
В известных системах температура двигателя обычно определяется по температуре охлаждающей жидкости или по температуре горючей смеси на входе в камеру сгорания.
В заявке DE 4401828 A1 описан способ, позволяющий в момент расчета количества дозируемого топлива предельно точно предсказывать степень наполнения воздухом того цилиндра, в который происходит впрыскивание этого топлива.
Согласно описанному в DE 4401828 А1 техническому решению предлагается определять величину пропорционального нагрузке будущего сигнала, характеризующего ожидаемую относительную степень наполнения воздухом цилиндра. Величину пропорционального нагрузке будущего сигнала определяют на основании пропорционального нагрузке фактического основного сигнала, пропорционального нагрузке фактического вспомогательного сигнала, который опережает указанный пропорциональный нагрузке фактический основной сигнал, и углового интервала поворота коленчатого вала. Этот угловой интервал поворота коленчатого вала может быть задан в зависимости от выражаемого в единицах времени или единицах угла поворота коленчатого вала предварительно накопленного количества топлива, продолжительности впрыскивания топлива и времени вычислений. Преимущество, связанное с использованием подобной величины, характеризующей угловой интервал поворота коленчатого вала, заключается в том, что благодаря этому создается возможность определять величину пропорционального нагрузке будущего сигнала в наиболее поздний момент времени и тем самым с наиболее высокой точностью.
Величину пропорционального нагрузке будущего сигнала целесообразно определять с помощью фильтра нижних частот, постоянную которого можно задавать в зависимости от нагрузки. Значение постоянной фильтра считывается при возрастании нагрузки по одной характеристике, а при падении нагрузки – по другой характеристике. Тем самым создается возможность заранее определять степень наполнения воздухом цилиндров ДВС с наименьшими затратами времени на вычисления.
Величину пропорционального нагрузке вспомогательного сигнала определяют на основании углового положения дроссельной заслонки, частоты вращения вала ДВС и при необходимости расхода воздуха, проходящего к дроссельной заслонке по байпасному каналу, и корректируют в зависимости от температуры впускаемого в ДВС воздуха и барометрического давления.
При открытии дроссельной заслонки на небольшой угол величину пропорционального нагрузке вспомогательного сигнала можно также определять на основании измеренного расходомером массового расхода воздуха, что, как правило, позволяет повысить точность такого сигнала в этом рабочем диапазоне.
Величину пропорционального нагрузке основного сигнала можно определять, например, на основании измеренного во впускном коллекторе давления и частоты вращения, на основании измеренного расходомером массового расхода воздуха или путем фильтрации пропорционального нагрузке вспомогательного сигнала.
Подобный подход может использоваться при работе двигателя и в переходном, и в установившемся режиме, поскольку при определении величины пропорционального нагрузке будущего сигнала используется пропорциональный нагрузке вспомогательный сигнал, согласованный с пропорциональным нагрузке основным сигналом. Корректирующее значение (поправка), необходимое для указанного согласования пропорционального нагрузке вспомогательного сигнала, рассчитывается путем интегрирования величины рассогласования между пропорциональным нагрузке основным сигналом и подвергнутым фильтрации пропорциональным нагрузке вспомогательным сигналом, скорректированным на соответствующую поправку. При этом подвергнутый фильтрации пропорциональный нагрузке вспомогательный сигнал получают путем фильтрации скорректированного пропорционального нагрузке вспомогательного сигнала.
При осуществлении этого известного способа пропорциональный нагрузке будущий сигнал используется только для определения количества впрыскиваемого топлива.
Проблематика, лежащая в основе настоящего изобретения, заключается в том, что ДВС с принудительным (искровым) воспламенением рабочей смеси проявляют при динамических изменениях нагрузки (т.е. в динамическом режиме) повышенную по сравнению с установившимся режимом работы склонность к детонации, устранить которую обычно пытаются за счет использования так называемого адаптивного упреждения динамического изменения нагрузки, т.е. за счет дополнительного изменения момента зажигания в сторону позднего в период работы ДВС в динамическом режиме. Подобное дополнительное упреждение динамического изменения нагрузки вводится при превышении градиентом нагрузки, т.е. мгновенной скоростью, соответственно мгновенным возрастанием скорости изменения нагрузки, некоторого порогового значения. После этого упреждение динамического изменения нагрузки сохраняется в течение некоторого периода времени и затем его величина постепенно уменьшается путем соответствующего регулирования до нуля.
Недостаток этого известного описанного выше подхода заключается, как было установлено, в том, что градиент нагрузки, который является разностной, т.е. мгновенной, величиной, не несет никакой информации об изменении нагрузки, которое фактически происходит в течение всего последующего периода работы ДВС в динамическом режиме. Такое изменение нагрузки определяется лишь в более поздний момент времени путем интегрирования градиента нагрузки по времени, что, однако, слишком поздно для задания величины упреждения динамического изменения нагрузки.
Иными словами, при использовании обычного подхода выдаваемая величина упреждения динамического изменения нагрузки зависит только от того, насколько быстро изменяется эта нагрузка в некоторый момент времени при работе ДВС в динамическом режиме. Следовательно, при незначительном быстром изменении нагрузки выдается та же величина упреждения динамического изменения нагрузки, что и при значительном и таком же быстром изменении этой нагрузки.
Сказанное проиллюстрировано на фиг.5. На показанной на этом чертеже диаграмме t означает время, tdyst означает момент начала работы ДВС в динамическом режиме, tdyena означает момент окончания работы ДВС в динамическом режиме в случае "а", tdyenb означает момент окончания работы ДВС в динамическом режиме в случае "b", rl означает степень наполнения, а drl означает градиент степени наполнения. В случае "а" происходит значительное и быстрое изменение степени наполнения Δrla, а в случае "b" – незначительное и такое же быстрое изменение степени наполнения Δrlb.
Вместе с тем температурные изменения, происходящие внутри двигателя и влияющие на его склонность к детонации, в случае "а" являются более значительными и поэтому величина упреждения динамического изменения нагрузки соответственно должна была бы быть существенно выше. Однако для этого в момент перехода ДВС на работу в динамическом режиме интегрированная величина ожидаемого изменения нагрузки уже должна быть известна. В существующих устройствах устранения детонационных стуков в ДВС подобная информация отсутствует.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать способ устранения детонационных стуков в ДВС при его работе в динамическом режиме, который позволял бы решить описанные выше проблемы.
Указанная задача решается согласно изобретению благодаря тому, что содержащееся в многопараметровой характеристике значение для величины упреждения динамического изменения нагрузки корректируют в каждом случае в момент окончания динамического режима работы ДВС в соответствии с интенсивностью детонационных стуков, выявленных с помощью устройства выявления детонационных стуков.
Преимущество предлагаемого в изобретении способа по сравнению с известными решениями состоит в том, что оно позволяет физически обоснованно и динамически с более высокой точностью задавать величину упреждения динамического изменения нагрузки и благодаря этому более эффективно устранять детонационные стуки в динамическом режиме работы ДВС.
Предлагаемый в изобретении алгоритм адаптации позволяет получать более точные адаптивные значения, а тем самым и улучшить динамическую характеристику. При этом создается возможность более эффективной оценки адаптивных значений на достоверность, что упрощает их применение.
Для усовершенствования известных из уровня техники подходов в изобретении предлагается задавать величину упреждения динамического изменения нагрузки на уровне предсказанного изменения пропорционального нагрузке сигнала, соответственно изменения степени наполнения. При этом следует отметить, что понятия "пропорциональный нагрузке сигнал" и "пропорциональный степени наполнения (цилиндра ДВС воздухом) сигнал" имеют в контексте настоящего описания синонимичные значения, поскольку они взаимосвязаны простым коэффициентом пропорциональности.
Так, например, на основании величины задаваемого крутящего момента, определяемой по положению педали акселератора и на основании других входных параметров или величин, можно рассчитать величину заданной нагрузки, соответственно заданной степени наполнения. Регулируемое изменение фактической нагрузки в сторону заданного значения путем установки дроссельной заслонки в соответствующее положение и при необходимости управления турбонагнетателем системы наддува ДВС происходит при этом с некоторой задержкой. Иными словами, в момент большого изменения нагрузки, необходимого для координации крутящего момента, такое изменение несколько запаздывает по отношению к фактической степени наполнения цилиндра. Однако уже предсказанная к этому моменту времени разность значений нагрузки является мерой изменения нагрузки, фактически ожидаемого в динамическом режиме.
Это означает, что в динамическом режиме для задания величины упреждения динамического изменения нагрузки вместо сигнала, характеризующего мгновенный градиент нагрузки, используется разность между предсказанным и мгновенным пропорциональными нагрузке сигналами.
Величина упреждения динамического изменения нагрузки более точно, чем прежде, согласуется с фактическими физическими потребностями, т.е. с величиной и скоростью изменения нагрузки. Тем самым исключается выдача неоправданно большой величины упреждения динамического изменения нагрузки, сопровождаемой снижением кпд и ухудшением реакции двигателя на соответствующее воздействие. При этом можно использовать уже имеющиеся величины, используемые в системе управления двигателем.
В результате устраняется одна из основных причин появления детонации при работе ДВС в динамическом режиме, которую невозможно оптимально учесть в используемых на сегодняшний день алгоритмах динамической адаптации, применяемых в системах регулирования по детонации.
Согласно одному из предпочтительных вариантов осуществления предлагаемого в изобретении способа в качестве рабочих параметров определяют частоту вращения, и/или температуру впускаемого в ДВС воздуха, и/или угловое положение дроссельной заслонки, и/или давление во впускном коллекторе, и/или объемный либо массовый расход впускаемого в ДВС воздуха, и/или угол поворота коленчатого вала, и/или температуру ДВС. В этом случае предпочтительно, чтобы содержащиеся в многопараметровой характеристике значения для величины упреждения динамического изменения нагрузки были дополнительно распределены по диапазонам частоты вращения, при этом соответствующее значение для величины упреждения динамического изменения нагрузки считывается из той области многопараметровой характеристики, в которой диапазон частоты вращения соответствует фактической частоте вращения.
В соответствии со следующим предпочтительным вариантом осуществления предлагаемого в изобретении способа факт перехода ДВС на динамический режим работы устанавливают с помощью устройства обнаружения динамических режимов в том случае, когда градиент нагрузки превышает заданное пороговое значение.
Величину пропорционального нагрузке будущего сигнала предпочтительно вычислять на основании пропорционального нагрузке фактического основного сигнала, пропорционального нагрузке фактического вспомогательного сигнала, который опережает указанный пропорциональный нагрузке фактический основной сигнал, и на основании углового интервала поворота коленчатого вала, задаваемого в зависимости от времени вычисления, выраженного в единицах времени или единицах угла поворота коленчатого вала. В этом случае величину пропорционального нагрузке фактического вспомогательного сигнала предпочтительно определять на основании углового положения дроссельной заслонки, частоты вращения вала ДВС и при необходимости расхода воздуха, проходящего к дроссельной заслонке по байпасному каналу и/или через дополнительные байпасные клапаны. Величину же пропорционального нагрузке фактического основного сигнала предпочтительно определять на основании измеренного во впускном коллекторе давления и частоты вращения, на основании измеренного расходомером массового расхода воздуха или путем фильтрации пропорционального нагрузке фактического вспомогательного сигнала.
В соответствии еще с одним предпочтительным вариантом осуществления предлагаемого в изобретении способа величину пропорционального нагрузке будущего сигнала определяют с учетом регулируемого изменения углового положения распределительного вала и/или рециркуляции отработавших газов.
Согласно еще одному предпочтительному варианту осуществления предлагаемого в изобретении способа разность значений нагрузки, определенную с помощью блока управления в момент начала работы ДВС в динамическом режиме, сравнивают с разностью значений нагрузки, определенной в момент окончания работы ДВС в динамическом режиме, и значение для величины упреждения динамического изменения нагрузки, хранящееся в соответствующей области многопараметровой характеристики, корректируют в многопараметровой характеристике в момент окончания работы ДВС в динамическом режиме только в том случае, когда разность указанных разностей значений нагрузки в момент начала и окончания указанного динамического режима меньше заданного значения.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
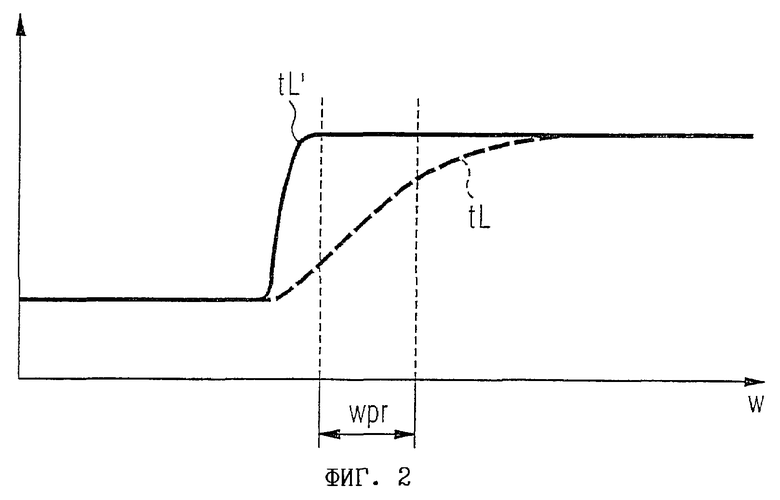
на фиг.1 – технические средства, обеспечивающие работу ДВС, в котором может использоваться предлагаемое в изобретении решение,
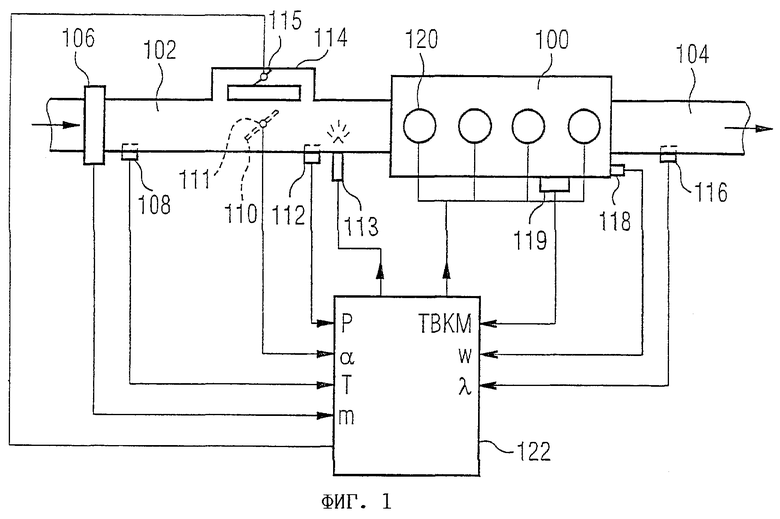
на фиг.2 – диаграмма, иллюстрирующая характер изменения пропорционального нагрузке основного сигнала tL (прерывистая линия) и пропорционального нагрузке вспомогательного сигнала tL' (сплошная линия) в зависимости от угла w поворота коленчатого вала;
на фиг.3 – блок-схема, иллюстрирующая последовательность выполнения операций для первого варианта осуществления изобретения;
на фиг.4 – диаграмма, отражающая изменение во времени степени наполнения воздухом цилиндров ДВС и градиента степени наполнения воздухом цилиндров, для второго варианта осуществления изобретения, а именно в случае "с" при наличии предсказанного для момента времени tdyst изменения нагрузки и в случае "d" при отсутствии предсказанного для момента времени tdyst изменения нагрузки;
на фиг.5 – диаграмма, отражающая изменение во времени степени наполнения воздухом цилиндров ДВС и градиента степени наполнения воздухом цилиндров, а именно в случае "а" при значительном быстром изменении нагрузки и в случае "b" при незначительном, но также быстром изменении нагрузки.
На всех чертежах конструктивно или функционально одинаковые элементы обозначены одними и теми же позициями.
На фиг.1 показаны технические средства, обеспечивающие работу двигателя 100 внутреннего сгорания (ДВС), в котором может использоваться предлагаемое в изобретении решение.
Сначала более подробно рассмотрены показанные на чертеже элементы, используемые для управления ДВС 100. По впускному тракту 102 в ДВС 100 подается топливовоздушная (горючая) смесь, а отработавшие газы (ОГ) отводятся по выпускному тракту 104. Во впускном тракте 102 последовательно расположены, если смотреть в направлении потока впускаемого воздуха, расходомер 106 для измерения объемного или массового расхода воздуха, например термоанемометрический проволочный расходомер воздуха, температурный датчик 108 для определения температуры впускаемого воздуха, дроссельная заслонка 110 с датчиком 111 определения ее углового положения, датчик 112 давления и одна или несколько форсунок 113. Обычно в подобных системах, как минимум, используются расходомер 106 для измерения объемного или массового расхода воздуха и датчик 112 давления.
В обход того участка впускного тракта, на котором установлена дроссельная заслонка 110, проходит байпасный канал 114 с расположенным в нем регулятором 115 частоты вращения при холостом ходе. Необходимость в использовании байпасного канала 114 и регулятора 115 частоты вращения при холостом ходе может отпасть в том случае, если частота вращения при холостом ходе регулируется с помощью дроссельной заслонки 110. При необходимости могут быть предусмотрены дополнительные байпасные клапаны, которые при холостом ходе обеспечивают поддержание частоты вращения на необходимом уровне, например, при включении кондиционера. В выпускном тракте 104 расположен кислородный датчик 116. На самом ДВС 100 установлены датчик 118 углового положения коленчатого вала и датчик 119 определения температуры ДВС 100. Кроме того, для воспламенения горючей смеси в цилиндрах в ДВС 100 предусмотрены, например, четыре свечи 120 зажигания.
Выходные сигналы описанных выше датчиков передаются в центральный блок 122 управления. Такими сигналами являются, в частности, сигнал m от расходомера 106, измеряющего объемный или массовый расход воздуха, сигнал Т от температурного датчика 108, предназначенного для определения температуры впускаемого воздуха, сигнал α от датчика 111 определения углового положения дроссельной заслонки 110, сигнал р от датчика 112 давления, сигнал λ от кислородного датчика 116, сигнал w от датчика 118 углового положения коленчатого вала и сигнал ТВКМ от датчика 119 определения температуры ДВС 100. Блок 122 управления, обрабатывая сигналы указанных датчиков, управляет форсункой, соответственно форсунками 113, регулятором 115 частоты вращения при холостом ходе и свечами 120 зажигания, регулируя момент зажигания.
Расчет параметров упреждения динамического изменения нагрузки должен быть закончен к моменту ts замыкания контактов прерывателя системы зажигания, т.е. такой расчет должен быть проведен задолго до достижения коленчатым валом угла, соответствующего началу наполнения цилиндра.
Вместе с тем для расчета параметров упреждения динамического изменения нагрузки необходимо использовать величину, характеризующую изменение степени наполнения воздухом соответствующего цилиндра ДВС и определяемую как разность пропорционального нагрузке основного сигнала tL, выдаваемого по достижении коленчатым валом угла, соответствующего началу наполнения цилиндра, и пропорционального нагрузке основного сигнала, выдаваемого в момент начала динамического изменения нагрузки, т.е. необходима возможность предсказывать разность между значениями степени наполнения, соответственно разность между значениями нагрузки.
Известный из DE 4401828 А1 способ позволяет приблизительно предсказывать величину пропорционального нагрузке сигнала tL, выдаваемого по достижении коленчатым валом угла, соответствующего началу наполнения цилиндра, и называемого ниже будущим (предваряющим) пропорциональным нагрузке сигналом tLPr. При этом используется прежде всего тот факт, что известен основной фактор, влияющий на характеристику будущего пропорционального нагрузке сигнала tLPr, т.е. известно угловое положение α дроссельной заслонки 111, а также тот факт, что сигнал α несколько опережает сигнал tL. Сказанное более подробно проиллюстрировано на фиг.2.
На фиг.2 изображена диаграмма, на которой показано изменение пропорционального нагрузке основного сигнала tL (прерывистая линия) и пропорционального нагрузке вспомогательного сигнала tL' (сплошная линия) в зависимости от угла w поворота коленчатого вала. В установившемся режиме кривые, характеризующие изменение сигналов tL и tL', совпадают (левая (соответственно крайняя правая) часть диаграммы). При переходе от более низкой к более высокой нагрузке кривая, описывающая изменение сигнала tL', имеет существенно более крутой наклон по сравнению с кривой, описывающей изменение сигнала tL, что позволяет на основании фактических значений сигналов tL' и tL предсказывать будущие значения сигнала tL, т.е. определять на основании фактических пропорциональных нагрузке вспомогательного tL' и основного tL сигналов величину будущего сигнала tLPr, пропорционального нагрузке.
Определять будущий пропорциональный нагрузке сигнал tLPr можно на основе простой модели впускного газопровода (впускного коллектора), описываемой характеристикой фильтра нижних частот первого порядка с зависящей от нагрузки постоянной фильтра. При фактическом значении угла w поворота коленчатого вала величину будущего пропорционального нагрузке сигнала tLPr для будущего угла поворота коленчатого вала, равного w + wPr, можно предсказать с помощью следующей формулы:
tLPr=tL(w+wPr)=tL(w)+(tL'(w)–tL(w))·(1–exp(–wPr/wF)).
В приведенной выше формуле wPr означает прогнозируемый угол, т.е. разность между будущим углом поворота коленчатого вала, для которого предсказывается значение будущего пропорционального нагрузке сигнала tLPr (обычно этот угол представляет собой тот угол поворота коленчатого вала, который соответствует началу наполнения цилиндра), и мгновенным углом w поворота коленчатого вала.
Как указывалось выше, преобразование пропорционального нагрузке сигнала tL в пропорциональный степени наполнения сигнал rl и наоборот является тривиальной процедурой.
При обычно применяемом в настоящее время процессе адаптации и выдачи величины wkrdya упреждения динамического изменения нагрузки, на использовании которого основано настоящее изобретение, с началом динамического режима в момент времени tdyst, например при превышении величиной drl порогового значения, определяется диапазон stkrnx частоты вращения, в котором лежит мгновенная частота вращения вала ДВС и который сохраняется в регистре, выполненном в виде запоминающего устройства с произвольной выборкой (ЗУПВ). Величина wkrdya упреждения динамического изменения нагрузки, адаптированная к этому диапазону stkrnx частоты вращения в предшествующие динамические режимы, считывается из ЗУПВ. Детонационные стуки, возникающие при определенных условиях в динамическом режиме, классифицируются по их интенсивности на детонационные стуки нормальной и высокой интенсивности. На основе подобной классификации в конце динамического режима в момент времени tdyen, например при величине drl меньше порогового значения, определяется значение, на которое при определенных условиях необходимо скорректировать выданную величину упреждения динамического изменения нагрузки, т.е. происходит адаптация новой величины упреждения динамического изменения нагрузки для указанного диапазона частоты вращения wkrdya'. При этом диапазон, в котором допустима подобная адаптация, ограничен заданными пределами.
На фиг.3 показана блок-схема, иллюстрирующая последовательность выполнения операций для первого варианта осуществления изобретения.
Согласно этому первому варианту осуществления изобретения диапазон адаптации, помимо его зависимости от частоты вращения, задаваемой в виде диапазона stkrnx частоты вращения, ставится также в зависимость от ожидаемой в момент времени tdyst предсказанной разности значений нагрузки ΔrlPr=rlPr-rl, задаваемой аналогичным образом в виде диапазона stkrdrlx разности нагрузок.
С этой целью при обнаружении начала динамического режима в момент времени tdyst (шаг 400), как и ранее, на основании фактической частоты n вращения определяется и сохраняется в памяти диапазон stkrnx частоты вращения. Дополнительно формируется и сохраняется в памяти (шаг 410) ожидаемая разность значений нагрузки ΔrlPr = rlPr – rl.
На основе этой разности ΔrlPr по соответствующей характеристике определяется и сохраняется в памяти соответствующий диапазон stkrdrlx разности нагрузок. Значения stkrnx и stkrdrlx адресованы в этом случае в тот диапазон адаптации, из которого считывается величина wkrdya упреждения для последующего динамического режима (шаг 420).
Подобному значению необязательно может быть также присвоен зависящий от температуры весовой коэффициент и после этого такое значение может передаваться на дальнейшую обработку.
В динамическом режиме возникающие детонационные стуки классифицируются по интенсивности, на основании которой при обнаружении окончания динамического режима в момент времени tdyen (шаг 430) определяется значение, на которое при определенных условиях необходимо скорректировать выдаваемую величину упреждения динамического изменения нагрузки с получением в результате скорректированной величины wkrdya' упреждения динамического изменения нагрузки для следующего цикла (шаг 440). На этом выполнение показанной на блок-схеме процедуры заканчивается.
Схематично показанная на фиг.4 диаграмма, отражающая изменение во времени степени наполнения воздухом цилиндров ДВС и градиента степени наполнения воздухом цилиндров, позволяет пояснить второй вариант осуществления изобретения, а именно в случае "с" при наличии предсказанного для момента времени tdyst изменения нагрузки и в случае "d" при отсутствии предсказанного для момента времени tdyst изменения нагрузки.
В дополнение к рассмотренному выше первому варианту осуществления изобретения во втором варианте значение поправки проверяется на достоверность с целью определить, совпадает ли величина Δrl изменения степени наполнения цилиндра, фактически происходящего в динамическом режиме, в достоверных (практически применимых) пределах с предварительно рассчитанной величиной ΔrlPr изменения степени наполнения цилиндра.
Для этого одновременно с началом динамического режима значение rl, характеризующее степень наполнения цилиндра, сохраняется в ЗУПВ в виде начального значения rldyst. Равным образом в момент окончания динамического режима значение rl снова сохраняется в ЗУПВ в виде конечного значения rldyen. Если величина, характеризующая изменение степени наполнения воздухом цилиндра Δrl = rldyen – rldyst, отклоняется вниз от предварительно рассчитанного значения ΔrlPr изменения степени наполнения цилиндра самое большее на величину DRLSPE, то в этом случае процесс адаптации возможен. Иными словами, накапливающий регистр активизируется для повторного расчета адаптивного значения только в том случае, когда выполняется следующее условие:
DRLSPE+rldyen–rldyst≥ΔrlPr, соответственно rldyen–rldyst≥ΔrlPr–DRLSPE.
В противном случае адаптация нецелесообразна, поскольку выдаваемая на основании значения ΔrlPr величина упреждения динамического изменения нагрузки не согласуется с фактически происходящим изменением степени наполнения воздухом цилиндра, равным rldyen – rldyst.
Таким образом, в показанном на фиг.4 случае "с" при Δrlc≥ΔrlPr-DRLSPE адаптация целесообразна, тогда как в случае "d" при Δrld<ΔrlPr–DRLSPE адаптация не имела бы смысла.
Скорость уменьшения регулируемой величины упреждения динамического изменения нагрузки по окончании динамического режима также целесообразно ставить в зависимость от результата сравнения DRLSPE+rldyen-rldyst≥ΔrlPr. Если фактическое изменение нагрузки меньше предсказанного значения по меньшей мере на величину DRLSPE, то скорость уменьшения регулируемой величины упреждения увеличивается, например удваивается. В противном случае подобное уменьшение регулируемой величины упреждения происходит с нормальной заданной скоростью.
В следующем – третьем – варианте осуществления изобретения предлагается формировать диапазон адаптации только в зависимости от ожидаемой величины ΔrlPr, характеризующей разность степеней наполнения воздухом цилиндра и задаваемой в виде диапазона stkrdrlx разности нагрузок (т.е. не в зависимости от диапазона частоты вращения). Именно эта величина является определяющим параметром, характеризующим склонность ДВС к детонации в динамическом режиме. Эта величина в неявном виде зависит от частоты вращения, поскольку максимально возможное изменение нагрузки зависит от частоты вращения. Еще одна зависимость от частоты вращения проявляется во влиянии температуры. Поэтому упоминавшийся выше зависящий от температуры весовой коэффициент целесообразно использовать не только в отношении смоделированной температуры evtmod у впускного клапана, но и дополнительно в отношении частоты вращения n, задавая его в виде многопараметровой характеристики (n, evtmod). Тем самым создается возможность определять фактические, зависящие от частоты вращения величины в физически оптимальных местах. В остальном используемый в третьем варианте подход соответствует таковому, используемому в первом, соответственно втором, вариантах.
Настоящее изобретение не ограничено рассмотренными выше предпочтительными вариантами его осуществления и предполагает возможность внесения в него различных изменений и модификаций. С учетом сказанного изобретение не ограничено, в частности, описанной выше в качестве примера процедурой предсказания. Так, например, погрешность обновления данных при расчете угла опережения зажигания может быть скомпенсирована за счет использования предсказанного сигнала с дополнительным учетом регулируемого изменения углового положения распределительного вала и рециркуляции отработавших газов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЗАЖИГАНИЕМ | 1999 |
|
RU2222710C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ДЕТОНАЦИОННОГО СТУКА ПРИ СМЕНЕ РЕЖИМОВ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2009 |
|
RU2528780C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И КОРРЕКЦИИ ОШИБОК ПРИ КОНТРОЛЕ РАБОЧИХ ПАРАМЕТРОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2271459C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2387859C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 1998 |
|
RU2212555C2 |
| УСТРОЙСТВО ДЛЯ ПОДАВЛЕНИЯ ДЕТОНАЦИИ В ДВИГАТЕЛЯХ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2220318C2 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПО ДЕТОНАЦИИ ПРИ ВЫХОДЕ ИЗ СТРОЯ ДАТЧИКА ФАЗЫ | 2000 |
|
RU2243407C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2264548C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКА | 2001 |
|
RU2266555C2 |
| СПОСОБ ПРОГРЕВА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2256087C2 |



Изобретение относится к способу устранения детонационных стуков в двигателе внутреннего сгорания (ДВС) при его работе в динамическом режиме. Технический результат заключается в эффективном устранении детонационных стуков в динамическом режиме работы ДВС. Способ устранения детонационных стуков в ДВС осуществляется с использованием устройства сбора и предварительной обработки данных, блока управления, устройства выявления детонационных стуков и устройства обнаружения динамических режимов. С помощью устройства сбора и предварительной обработки данных определяют рабочие параметры ДВС. С помощью устройства обнаружения динамических режимов распознают переход ДВС на динамический режим работы. С помощью блока управления в зависимости от измеренных рабочих параметров рассчитывают угол опережения зажигания с учетом в динамическом режиме величины упреждения динамического изменения нагрузки, которую выбирают по хранящейся в памяти блока управления многопараметровой характеристике. При этом содержащееся в многопараметровой характеристике значение для величины упреждения динамического изменения нагрузки корректируют в каждом случае в момент окончания динамического режима работы ДВС в соответствии с интенсивностью детонационных стуков, выявленных с помощью устройства выявления детонационных стуков. 9 з.п. ф-лы, 5 ил.
| DE 4401828 A1, 27.07.1995.DE 3420465 A, 06.05.1986.US 5445127 A, 29.08.1995.US 4694800 A, 22.09.1987.US 5503126 A, 02.04.1996.RU 2099583 C1, 20.12.1997. |

