Настоящее изобретение относится к способу и устройству управления силовым агрегатом транспортного средства, в котором по меньшей мере в соответствии задаваемым водителем воздействием формируют по меньшей мере одно заданное значение крутящего момента силового агрегата или по меньшей мере одно заданное значение мощности силового агрегата и путем управления силовым агрегатом устанавливают это по меньшей мере одно заданное значение, при этом максимально допустимый крутящий момент или максимально допустимую мощность определяют, исходя по меньшей мере из задаваемого водителем воздействия. Изобретение относится также к соответствующему устройству управления силовым агрегатом транспортного средства, имеющему средства, которые по меньшей мере в зависимости от задаваемого водителем воздействия определяют по меньшей мере одно заданное значение крутящего момента или по меньшей мере одно заданное значение мощности для управления силовым агрегатом и которые устанавливают крутящий момент или мощность силового агрегата на это по меньшей мере одно заданное значение, при этом предусмотрены средства, которые по меньшей мере в зависимости от задаваемого водителем воздействия определяют значение максимально допустимого крутящего момента или максимально допустимой мощности.
Подобные способ и устройство известны из DE A 19536038. Согласно этой публикации для управления силовым агрегатом крутящий момент или мощность силового агрегата с помощью соответствующей электроники регулируют по меньшей мере в зависимости от положения регулируемого водителем органа управления. На основании этого положения, в котором находится указанный орган управления, а также по меньшей мере на основании частоты вращения вала двигателя определяют ту величину максимально допустимого крутящего момента или максимально допустимой мощности, которую крутящий момент или мощность силового агрегата не должны превышать при текущем режиме работы. Исходя из таких рабочих параметров как частота вращения вала двигателя и расход впускаемого воздуха, определяют фактически установленный крутящий момент или фактически установленную мощность силового агрегата, сравнивают их с максимально допустимым значением и обеспечивают срабатывание в ответ на отклонение в случае, если расчетные значения крутящего момента или мощности превысят их максимально допустимые значения.
Такой метод контроля обеспечивает надежную работу силового агрегата, эффективно предотвращая возникновение повышенного, нежели это определяется выбором водителя, крутящего момента этого силового агрегата. При этом срабатывание описанной в указанной выше публикации системы контроля целесообразно обеспечить только при фактическом наличии отклонения. Наряду с этим возможно возникновение таких рабочих ситуаций, например, в переходных режимах, в которых система контроля в случае узкого заданного диапазона допустимых значений будет срабатывать и при отсутствии отклонений. Такое поведение этой системы является нежелательным.
Исходя из вышеизложенного, в основу настоящего изобретения была положена задача разработать соответствующие меры, которые позволили бы предотвратить нежелательное, или ложное, срабатывание описанной выше системы контроля.
В отношении способа указанного в начале описания типа эта задача решается благодаря тому, что по меньшей мере одно заданное значение ограничивается максимально допустимым крутящим моментом или максимально допустимой мощностью в случае превышения этим заданным значением соответствующего максимально допустимого значения.
В отношении устройства указанного в начале описания типа положенная в основу изобретения задача решается благодаря тому, что в таком устройстве предусмотрены средства, ограничивающие указанное по меньшей мере одно заданное значение максимально допустимым значением в случае превышения этим заданным значением указанного максимально допустимого значения.
Из DE A 19619320 известна система управления двигателем внутреннего сгорания (ДВС) с ориентированной на крутящий момент функциональной структурой. При этом на основании положения регулируемого водителем органа управления с учетом по меньшей мере частоты вращения вала двигателя формируется определяемое в соответствии с задаваемым водителем воздействием заданное значение крутящего момента. Значение этого крутящего момента объединяется с использованием логических операций в координаторах, предназначенных для регулирования степени наполнения цилиндров ДВС и для синхронизированных с коленчатым валом воздействий (например, регулирование момента зажигания) с внешними и внутренними воздействиями, используемыми для регулирования крутящего момента. Затем полученные в результате заданные моменты преобразуют, например, в заданные значения момента зажигания и положения дроссельной заслонки. Такая система управления двигателем представлена на фиг.1 и 2.
Благодаря ограничению в силовом агрегате по меньшей мере одного заданного значения крутящего момента его максимально допустимым значением, соответственно за счет принятия аналогичных мер, когда система управления двигателем вместо значений крутящих моментов рассчитывает значения мощности, срабатывание системы контроля, работа которой основана на сравнения расчетных и максимально допустимых значений крутящего момента или мощности, и ее реакция на отклонения будут иметь место только при фактическом наличии таких отклонений. Такое техническое решение значительно повышает комфортабельность езды и готовность силового агрегата к работе. Особое преимущество при контроле за работой силового агрегата, осуществляемом сравнением расчетных и максимально допустимых значений крутящего момента или мощности, заключается в возможности задавать очень узкий диапазон предельных значений, благодаря чему при фактическом появлении отклонения в зоне действия системы управления двигателем такое отклонение можно очень быстро обнаружить и очень быстро принять соответствующие контрмеры по его устранению.
Кроме того, особое преимущество состоит в том, что в системе управления двигателем с ориентированной на изменение крутящего момента функциональной структурой заданные значения крутящих моментов как по цепи регулирования степени наполнения цилиндров, так и по цепи быстрых воздействий путем прекращения впрыскивания топлива, путем воздействия на систему дозирования топлива и/или путем воздействия на систему регулирования момента зажигания ограничены максимально допустимым крутящим моментом. Такое решение эффективно предупреждает превышение максимально допустимого крутящего момента, а тем самым и срабатывание системы контроля за крутящим моментом, даже в переходных режимах и в особых ситуациях. То же самое относится и к функциональной структуре, ориентированной на изменение мощности.
Особое преимущество состоит в наличии гистерезиса между введением ограничения и его снятием, предпочтительно в наличии такого гистерезиса у указанных параметров, регулируемых по цепи быстрых воздействий.
Согласно одному из предпочтительных вариантов в качестве по меньшей мере одного заданного значения предлагается использовать заданное значение крутящего момента или мощности, устанавливаемое путем регулирования степени наполнения цилиндров двигателя внутреннего сгорания (ДВС).
В этом случае заданное значение для установки с помощью цепи регулирования степени наполнения цилиндров ДВС предпочтительно ограничивать максимально допустимым значением, выбирая минимальное значение из образующих заданное значение величин и максимально допустимого значения.
Согласно еще одному варианту в качестве по меньшей мере одного заданного значения предпочтительно использовать заданное значение крутящего момента или мощности для синхронизированных с коленчатым валом управляющих воздействий, таких как воздействие для регулирования дозирования топлива и воздействие для регулирования момента зажигания. В этом случае заданное значение предпочтительно сравнивать с максимально допустимым значением, и при превышении этим заданным значением максимально допустимого значения далее в качестве заданного значения использовать максимально допустимое значение. При этом ограничение предпочтительно снимать в том случае, когда заданное значение меньше предварительно установленного значения, определенного на основании максимально допустимого значения.
Согласно изобретению предпочтительно учитывать влияние системы регулирования тягового момента, развиваемого двигателем (СРТМД). Поскольку регулирование момента развиваемого двигателем тягового момента может повышать мощность последнего, ограничение при активизированной системе регулирования развиваемого двигателем тягового момента снимают. Тем самым предупреждается нежелательное влияние на выполняемую системой регулирования развиваемого двигателем тягового момента функцию. Наиболее предпочтительно включить эту систему только в цепь быстрых воздействий, чтобы она при необходимости могла на непродолжительное время повышать крутящий момент.
Согласно еще одному варианту предлагается определять заданное значение для дозирования топлива и с учетом дополнительных воздействий определять заданное значение для установки с помощью цепи регулирования момента зажигания, при этом ограничение вводится в том случае, когда заданное значение для момента зажигания превышает максимально допустимое значение, и снимается в том случае, когда заданное значение для дозирования топлива меньше предварительно установленного значения. Иными словами, при наличии возможности отключать воздействие, используемое для регулирования момента зажигания, особенно предпочтительно вводить ограничение в зависимости от регулируемого изменения момента зажигания крутящего момента, а снимать ограничение - в зависимости от рассчитываемого, в частности, исходя из положения педали акселератора крутящего момента, регулируемого дозированием топлива. Поскольку при отсутствии воздействия, используемого для регулирования момента зажигания, заданный крутящий момент для этого момента зажигания ориентирован на момент воздействия, т.е. на базовый момент, устанавливаемый на основе предварительно запрограммированных многопараметровых характеристик, тем самым обеспечивается ограничение фактического значения крутящего момента его базовым значением. Преимущество такого решения заключается в повышении надежности работы системы.
В соответствии со следующим вариантом предлагается также осуществлять сравнение еще одного максимально допустимого крутящего момента или максимально допустимой мощности с вычисленным фактическим крутящим моментом силового агрегата или с вычисленной фактической мощностью и обеспечивать срабатывание в ответ на отклонения при превышении фактическим значением максимально допустимого значения.
Другие преимущества предлагаемых в изобретении способа и устройства представлены в последующем описании.
Ниже изобретение более подробно рассмотрено на примере вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - функциональная схема устройства управления двигателем внутреннего сгорания,
на фиг.2 - схема ориентированной на изменение крутящего момента функциональной структуры системы управления силовым агрегатом,
на фиг. 3 - блок-схема определения максимально допустимого крутящего момента и связанных с этим мер контроля,
на фиг.4 - схема ограничения значения заданного для установки с помощью цепи регулирования степени наполнения цилиндров крутящего момента в зависимости от максимально допустимого крутящего момента и
на фиг. 5 и 6 - два примера выполнения, поясняющие принцип ограничения заданного крутящего момента максимально допустимым крутящим моментом для установки на него с помощью цепи быстрых воздействий.
На фиг. 1 показано устройство управления многоцилиндровым двигателем 10 внутреннего сгорания (ДВС). Это устройство управления имеет электронный блок 12 управления, состоящий по меньшей мере из одного микрокомпьютера 14, одного входного блока 16 (или блока ввода данных) и одного выходного блока 18 (или блока вывода данных). Входной блок 16, выходной блок 18 и микрокомпьютер 14 соединены между собой коммуникационной шиной 20, служащей для обмена данными между ними. Ко входу входного блока 16 подсоединены входные линии 22, 24, 28 и 30. При этом линия 22 проходит от измерительного блока 32, определяющего положение β педали акселератора, линия 24 проходит от измерительного блока 34, определяющего частоту вращения nmot вала двигателя, линия 28 проходит от измерительного блока 38, определяющего количество hfm впускаемого воздуха, а линия 30 проходит по меньшей мере от еще одного блока 40 управления, например от блока управления противобуксовочной системой (ПБС), системой управления коробкой передач (СУКП) и/или системой регулирования тягового момента, развиваемого двигателем (СРТМД) (т.е. момента, развиваемого двигателем при полностью отпущенной педали акселератора). Для определения количества впускаемого воздуха в зависимости от варианта выполнения изобретения предусмотрены расходомер, измеряющий массовый расход воздуха, расходомер, измеряющий количественный расход воздуха, или датчики давления, измеряющие давление во впускном газопроводе или в камере сгорания. Наряду с указанными рабочими параметрами блок управления определяет и другие необходимые для управления двигателем параметры, такие как температура двигателя, скорость движения и т.д. К выходу выходного блока 18 подсоединена выходная линия 42, проходящая к дроссельной заслонке 44 с электроприводом, установленной в системе 46 впуска воздуха ДВС. Кроме того, на чертеже показаны выходные линии 48, 50, 52, 54 и т.д., соединенные с исполнительными или регулировочными устройствами для дозирования топлива, подаваемого в цилиндры ДВС 10, соответственно для регулирования момента зажигания в каждом цилиндре.
На примере показанной на фиг.2 схемы поясняются основные особенности ориентированной на регулирование крутящего момента функциональной структуры системы управления ДВС. Показанные на этой схеме элементы в предпочтительном варианте являются частями заложенной в микрокомпьютер программы, при этом отдельные блоки обозначают специальные части этой программы с таблицами, однопараметровыми характеристиками, многопараметровыми характеристиками и/или вычислительными алгоритмами.
Ко входу элемента 100, определяющего задаваемый водителем момент miped, подсоединены входные линии 22, 24 и 28. Информация об этом моменте поступает по линии 102 на элементы 104 и 106, к каждому из которых также подведена линия 30. Элементы 104 и 106 служат для выбора необходимых для управления двигателем значений заданного момента milsol и misol соответственно на основании поступивших в эти элементы значений заданного крутящего момента, задаваемых водителем, а также на основании задающих воздействия от внешних систем miext (например, ПБС, СУКП, СРТМД) и внутренних miint (например, ограничение частоты вращения вала двигателя, ограничение скорости движения). Выбранные заданные значения по линиям 108, соответственно 110 поступают в вычислительные блоки 112 и 114. Вычислительный блок 112, исходя из поступившего в него заданного значения, на основании по меньшей мере частоты вращения вала двигателя и расхода воздуха (фактическое наполнение свежей горючей смесью) рассчитывает величину коррекции момента зажигания и/или прерывает впрыскивание, и/или выдает управляющее воздействие для изменения состава горючей смеси. Аналогичным образом вычислительный блок 114, исходя из поступившего в него заданного значения, на основании по меньшей мере частоты вращения вала двигателя и расхода воздуха (фактическое наполнение свежей горючей смесью) рассчитывает степень наполнения цилиндра горючей смесью, выдавая по линии 42 соответствующее управляющее воздействие на привод, регулирующий положение дроссельной заслонки. Для обмена данными вычислительные блоки 112 и 114 соединены в предпочтительном варианте шиной 116.
Применяя описанный выше подход, который пояснен на примере фиг.2, различные воздействия, используемые для регулирования крутящего момента вала ДВС (воздействие со стороны ПБС, со стороны СРТМД, со стороны СУКП, со стороны водителя и т.д.), координируют регулированием степени наполнения цилиндров (медленное воздействие) с помощью дроссельной заслонки во впускном трубопроводе и/или регулированием дозирования топлива и момента зажигания (быстрое воздействие).
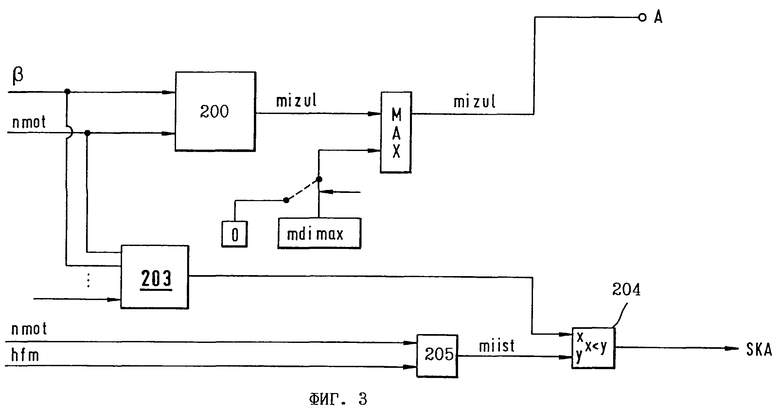
Показанная на фиг. 1 система управления на основании поступающих в нее входных величин рассчитывает параметры мощности ДВС, вследствие чего ошибка в вычислениях может привести к недопустимому превышению мощности, затрачиваемой двигателем на привод, а тем самым и к возникновению во время движения опасных ситуаций. Поэтому в соответствии с фиг.3 предусмотрена проверка правильности расчетов, используемых для регулирования мощности. Такую проверку производят в соответствии с приведенным в начале описания уровнем техники путем определения максимально допустимого момента mizul, его сравнения с вычисленным фактическим моментом miist ДВС, и в случае превышения фактическим моментом максимально допустимого момента принятия соответствующих мер, позволяющих среагировать на возникшее в результате такого превышения отклонение, что обеспечивается, например, отключением подачи топлива по сигналу SKA.
Подход, используемый для определения максимально допустимого момента и контроля за крутящим моментом, поясняется на примере предпочтительного варианта по фиг.3. В этом случае, как и на последующих чертежах, для наглядности использованы блок-схемы. Описываемые функции в указанном предпочтительном варианте выполняются входящим в состав блока управления двигателем микрокомпьютером по заложенным в него программам. Сначала на основании входных величин, которыми являются положение β педали акселератора и частота вращения nmot вала двигателя, по меньшей мере из одной многопараметровой характеристики 200 считывается значение максимально допустимого момента mizul. В предпочтительном варианте с этой целью используется предварительно определенная многопараметровая характеристика. Указанная многопараметровая характеристика устанавливает зависимость для соответствующего конкретному положению педали акселератора значения максимального момента, допустимого при определенной частоте вращения, с учетом таких повышающих крутящий момент функций, как, например, регулирование частоты вращения при холостом ходе. Считанное из многопараметровой характеристики значение пропускают, как и в упомянутом в начале описания уровне техники, через не показанный на схеме фильтр нижних частот. Этот фильтр реагирует только на уменьшение значения, выбираемого из многопараметровой характеристики.
В другом предпочтительном варианте предусмотрено использование двух многопараметровых рактеристик, устанавливающих зависимость крутящего момента от частоты вращения вала двигателя и от положения педали акселератора, при этом величина максимально допустимого крутящего момента складывается из значений, выбранных из обеих указанных многопараметровых характеристик. При этом в одной из многопараметровых характеристик учитываются повышающие максимально допустимый момент условия пуска двигателя и регулирование частоты вращения на холостом ходу при частоте вращения ниже заданной. В этом случае фильтрации подвергают только значения из другой многопараметровой характеристики.
Определенная таким путем величина максимально допустимого момента mizul поступает в обозначенный на схеме через МАХ блок выбора максимального значения, где она сравнивается с предварительно установленным постоянным значением mdimax. Последняя величина представляет собой максимально устанавливаемый момент. Значение mdimax выдается при активизированном регуляторе скорости движения (РСД-вкл. ). При отключенном (или деактивизированном) регуляторе скорости движения значение параметра на соответствующем входе блока выбора максимального значения равно нулю. Большее из поступивших значений момента (mizul, mdimax или 0) при последующей обработке используется в качестве максимально допустимого момента mizul. Благодаря такому решению в режиме регулирования скорости движения при полностью отпущенной педали акселератора максимально допустимый момент не будет слишком малым, и не будет происходить ложного срабатывания на превышение такого момента. Максимально допустимый момент mizul используется для ограничения заданных моментов ("выход А"), как это описано ниже со ссылкой на фиг.4-6.
Исходя из указанного максимально допустимого заданного момента, в результате получают фактический момент. На более высоком уровне контроля этот фактический момент miist сравнивается с допустимым моментом mimax.
Вычисление этого допустимого момента осуществляется тем же образом, что и допустимого заданного момента. Пример такого вычисления описан в приведенном в начале описания уровне техники. Его выполняют на шаге 203 вычисления. Максимально допустимый момент mimax, как правило, больше допустимого момента mizul, используемого для ограничения. При фильтрации (на шаге 203) в данном случае следует учитывать постоянную времени впускного трубопровода, задержку регулятора положения и повышающие крутящий момент функции (например, характеристику демпфера дроссельной заслонки).
В случае превышения фактическим моментом miist максимально допустимого момента mimax (что определяется компаратором 204) для устранения обнаруженного отклонения, при необходимости по истечении определенного времени задержки, выдается сигнал SKA на отключение подачи топлива. Фактический момент miist вычисляется в блоке 205 по меньшей мере на основании частоты вращения nmot вала двигателя и расхода впускаемого воздуха hfm.
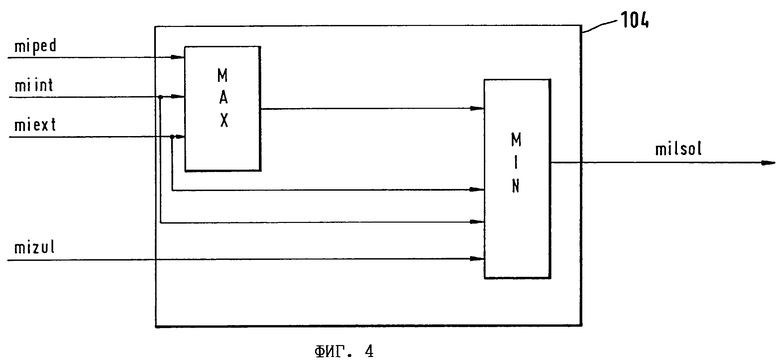
На фиг.4 поясняется принцип ограничения заданного для установки с помощью цепи регулирования степени наполнения значения крутящего момента milsol. Эту функцию в предпочтительном варианте выполняет координатор 104, в котором в блоке МАХ выбора максимального значения момент miped, определенный по заданному водителем положению педали акселератора, сравнивается с повышающими крутящий момент воздействиями от внешних и/или внутренних систем и функций, например от СРТМД. Затем наибольшее значение сравнивается в блоке MIN выбора минимального значения с понижающими крутящий момент воздействиями от внешних и/или внутренних систем и функций, например от ПБС, от системы ограничения частоты вращения и скорости движения и т.д. В указанный блок MIN выбора минимального значения дополнительно поступает значение максимально допустимого момента mizul. Из этих заданных значений крутящего момента соответственно выбирается наименьшая величина, которая выдается в качестве заданного значения крутящего момента milsol для установки на него с помощью цепи регулирования степени наполнения. При превышении же всеми влияющими на изменение крутящего момента воздействиями величины максимально допустимого крутящего момента для установки с помощью цепи регулирования степени наполнения в качестве заданного значения выдается значение указанного максимально допустимого крутящего момента. Таким путем заданное значение крутящего момента milsol, задаваемое для установки на него с помощью цепи регулирования степени наполнения, ограничивается максимально допустимым моментом mizul.
Ограничительное регулирование осуществляют и по цепи синхронизированных с коленчатым валом воздействий. На фиг.5 показан первый пример выполнения координатора 106. Вначале аналогично показанному на фиг.4 примеру в блоках MIN, МАХ выбора максимального и/или минимального значения на основании момента miped, определяемого по положению педали акселератора, а также на основании внешнего miext и/или внутреннего miint заданных моментов формируется заданный момент misolv для установки на него с помощью цепи синхронизированных с коленчатым валом воздействий. Затем это полученное заданное значение крутящего момента misolv сравнивается компаратором 300 с допустимым моментом mizul. При превышении вычисленным заданным значением момента misolv максимально допустимого значения mizul компаратор 300 выдает на логический элемент И 302 сигнал логической единицы (сигнал "1"). Далее заданное значение крутящего момента misolv поступает на компаратор 304, в котором оно сравнивается со сформированным на основании максимально допустимого крутящего момента mizul значением (mizul-mihyst). Это значение представляет собой максимально допустимый крутящий момент mizul, уменьшенный на величину предварительно установленного гистерезисного крутящего момента mihyst. При заданном значении крутящего момента ниже этого значения на логический элемент ИЛИ 306 поступает сигнал "1". Выход этого логического элемента ИЛИ соединен со входом сброса RS-триггера 308 и с инвертирующим входом логического элемента И 302. Кроме того, на логический элемент ИЛИ 306 поступает сигнал B_msr, имеющий положительный уровень при активизированной системе регулирования тягового момента, развиваемого двигателем. Выход логического элемента И 302 соединен с S-входом (или входом сигнала установки) RS-тригтера 308. Сигнал с Q-выхода триггера 308 подается на переключательный элемент 310, который при поступлении на него соответствующего сигнала переключается в такое коммутационное положение, в котором далее в цепь быстрых воздействий в качестве заданного значения крутящего момента misol вместо заданного значения крутящего момента misolv передается максимально допустимый момент mizul.
В случае превышения заданным значением крутящего момента misolv максимально допустимого крутящего момента mizul при неактивизированной системе регулирования тягового момента, развиваемого двигателем (т.е. B_msr=0), триггер 308 устанавливается логическим элементом И 302 в состояние "1". На Q-выходе устанавливается "высокий" уровень, в результате чего переключательный элемент 310 переключается в показанное штриховой линией положение. Если же заданное значение крутящего момента меньше максимально допустимого крутящего момента, уменьшенного на значение гистерезисного момента, компаратор 304 формирует сигнал, по которому триггер 308 устанавливается в исходное состояние, при этом одновременно на его S-входе по сигналу от логического элемента И 302 происходит смена уровня на логический "0". В результате по сигналу с Q-выхода триггера 308 переключательный элемент 310 снова переключается в положение, показанное сплошной линией. При активизированной системе регулирования тягового момента, развиваемого двигателем (т.е. B_msr=1), на входе сброса триггера 308 по сигналу от логического элемента ИЛИ 306 устанавливается уровень логической "1", а к S-входу постоянно приложено напряжение низкого уровня, соответствующего логическому "0". Таким образом переключательный элемент 310 удерживается в его показанном сплошной линией положении, что при активизированной системе регулирования тягового момента, развиваемого двигателем, позволяет при необходимости повысить заданное значение крутящего момента misol для установки на него с помощью цепи быстрых воздействий выше максимально допустимого момента mizul.
В предпочтительном варианте выполнения, показанном на фиг.6, на основании заданного значения крутящего момента misolv, полученного в блоке MINMAX выбора минимального/максимального значения, определяется заданное значение крутящего момента misolz, используемого при получении управляющего воздействия для регулирования момента зажигания. При этом учитываются, в частности, аддитивные поправочные, составляющие Δmi регулирования частоты вращения при холостом ходе (РЧВХХ) и функции предотвращения рывков (ФПР). С этой целью предусмотрена возможность переключать задаваемое значение момента зажигания (переключатель 400), благодаря чему в определенных ситуациях работы двигателя при формировании заданного значения крутящего момента для установки на него изменением момента зажигания за основу берется не заданное значение крутящего момента misolv, а базовое значение момента mibas. В этом случае базовое значение момента mibas соответствует крутящему моменту, который мог бы быть установлен при текущем режиме работы ДВС с учетом предварительно запрограммированных установок для момента зажигания и диапазона изменения коэффициента избытка воздуха λ. Базовое значение крутящего момента формируется на основании расхода впускаемого воздуха hfm и частоты вращения nmot вала двигателя, а также на основании тех влияющих на крутящий момент кпд, которые достигаются при базовой установке для момента зажигания и базовой установке для коэффициента избытка воздуха λ. Принцип ограничения обоих заданных значений крутящего момента соответствует таковому по фиг.5. Заданное значение крутящего момента, используемое при получении управляющего воздействия для изменения момента зажигания, подается при этом в компаратор 300 и таким образом принимает участие в принятии решения о необходимости ввести ограничение. В отличие от этого заданное значение крутящего момента misolv, задаваемое для установки на него с помощью цепи регулирования степени наполнения, поступает в компаратор 304, который принимает решение о снятии ограничения. После принятия решения о введении ограничения или о его снятии соответствующим образом срабатывает переключательный элемент 310. Для ограничения оба заданных значения крутящего момента misol и misolz заменяются на максимально допустимый крутящий момент mizul.
Выше изобретение описано на примере функциональной структуры, ориентированной на крутящий момент. Однако аналогичный подход используется и для управления двигателем на основании показателей мощности. В последнем случае указанные выше значения крутящего момента заменяют на соответствующие показатели мощности, которая, как очевидно, взаимосвязана с крутящим моментом через частоту вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267630C2 |
| СПОСОБ УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ (ВАРИАНТЫ) | 2001 |
|
RU2267632C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2264548C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2267631C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2264549C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2263810C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2239078C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РАБОТОЙ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ С НЕПОСРЕДСТВЕННЫМ ВПРЫСКИВАНИЕМ БЕНЗИНА | 1999 |
|
RU2236607C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ СИЛОВОГО АГРЕГАТА | 2008 |
|
RU2463466C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2240934C2 |



Изобретение относится к способу управления силовым агрегатом транспортного средства. Описаны способ и устройство управления силовым агрегатом транспортного средства, при этом в соответствии с задаваемым водителем воздействием формируется заданное значение крутящего момента или мощности, которое служит для управления силовым агрегатом, при этом определяется максимально допустимый момент или максимально допустимая мощность, а заданное значение ограничивается максимально допустимым значением в случае, если оно превысит указанное максимально допустимое значение. Техническим результатом является предотвращение нежелательного (ложного) срабатывания системы контроля. 2 с. и 8 з.п. ф-лы, 6 ил.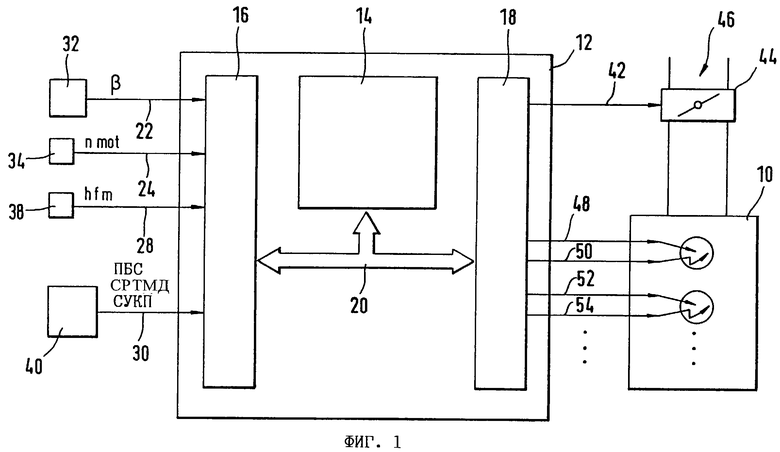
| DE 19536038 A1, 03.04.1997 | |||
| EP 0771943 A2, 07.05.1997 | |||
| DE 4314118 A1, 10.11.1994 | |||
| US 5692472 A, 02.12.1997 | |||
| Способ управления двигателем внутреннего сгорания | 1988 |
|
SU1636580A1 |

