Изобретение относится к океанологической технике и может быть использовано для дистанционного контроля состояния морской поверхности.
Известно устройство того же назначения, с помощью которого отслеживается положение свободной поверхности воды [1].
Устройство содержит буй положительной плавучести, в котором смонтировано три ортогонально ориентированных акселерометра, по выходным сигналам которых судят о параметрах морского волнения.
Недостатком аналога [1] является необходимость наличия в составе устройства трех ортогонально ориентированных акселерометров для контроля интенсивности морского волнения, а также отсутствие на выходах акселерометра оптического сигнала, который по оптико-волоконной линии связи можно было бы передать в надводный центр обработки информации и регистрации.
Известно устройство для контроля интенсивности морского волнения, содержащее заякоренный радиофицированный буй положительной плавучести с расположенными внутри его блоками электронной аппаратуры в виде усилителя и регистратора, электрически соединенного с радиопередатчиком буя, волоконно-оптический преобразователь параметров морского волнения, расположенный в морской среде и соединенный механической связью с буем положительной плавучести и выполненный в виде предметной и опорной волоконных катушек, оптически согласованных с источником когерентного света и фотоприемником в интерферометр, снабженный фазосдвигающим устройством, при этом выход фотоприемника подключен к усилителю [2].
Данное техническое решение [2] принято за прототип.
Волоконно-оптический преобразователь в прототипе выполнен в виде двух ортогонально ориентированных мембран, подпружиненных волоконными катушками. При расположении устройства в море на одну из мембран будет воздействовать полное давление, а на другую - гидростатическое. При этом на выходе интерферометра выделяется оптический сигнал, пропорциональный волновому давлению.
Поскольку выходной сигнал в прототипе оптический, то информация об интенсивности морского волнения может передаваться непосредственно по волоконно-оптической линии связи на подводный центр сбора информации, минуя радиоканал, что является преимуществом прототипа [2] по сравнению с аналогом [1].
Недостатком прототипа является односторонний характер получаемой информации: в прототипе по существу регистрируются только вертикальные колебания буя положительной плавучести под действием поверхностных волн. В то время как интенсивность морского волнения наиболее полно характеризуют пространственные колебания буя во всех направлениях.
Техническим результатом, получаемым от внедрения изобретения, является получение изотропной (независимой от направления) информации о колебаниях морских волн, по которой судят об интенсивности морского волнения.
Данный технический результат достигают за счет того, что известное устройство для контроля интенсивности морского волнения, содержащее заякоренный радиофицированный буй положительной плавучести с расположенными внутри его блоками электронной аппаратуры в виде усилителя и регистратора, электрически соединенного с радиопередатчиком буя, волоконно-оптический преобразователь параметров морского волнения, расположенный в морской среде и соединенный механической связью с буем положительной плавучести и выполненный в виде предметной и опорной волоконных катушек, оптически согласованных с источником когерентного света и фотоприемником в интерферометр, снабженный фазосдвигающим устройством, при этом выход фотоприемника подключен к усилителю, дополнительно содержит две сферические подложки отрицательной плавучести, одна из которых выполнена полой из упругого материала с расположенной внутри ее инерционной массой преимущественно в виде металлического шарика, при этом на наружной поверхности сферических подложек намотаны соответственно предметная и опорная волоконные катушки, причем предметная волоконная катушка намотана на поверхность полой подложки с натягом, а электронная аппаратура дополнительно содержит интегратор, подключенный входом к выходу усилителя, а выходом - к регистратору.
В частном случае механическая связь волоконно-оптического преобразователя с буем положительной плавучести выполнена независимой для обеих сферических подложек.
В частности, механическая связь полой сферической подложки с буем положительной плавучести выполнена мягкой.
Устройство может дополнительно содержать управляемое спускоподъемное устройство (или механизм) для полой сферической подложки с испытательным органом, установленные внутри буя, причем механическая связь полой сферической подложки с буем положительной плавучести кинематически согласована с управлением спускоподъемным механизмом, а в электронную аппаратуру дополнительно введены компаратор, двухуровневый источник опорных напряжений, масштабирующее устройство и блок управления, при этом выход интегратора дополнительно подключен к первому входу компаратора, соединенному вторым входом с двухуровневым источником опорных напряжений, а выходом - через блок управления с исполнительным органом спускоподъемного устройства и через масштабирующее устройство - со вторым входом регистратора.
В другом частном случае механическая связь полей сферической подложки с буем положительной плавучести может быть выполнена жесткой.
А механическая связь сферической подложки, на наружной поверхности которой намотана опорная волоконная катушка, может быть выполнена мягкой и с возможностью изменения заглубления подложки относительно буя положительной плавучести.
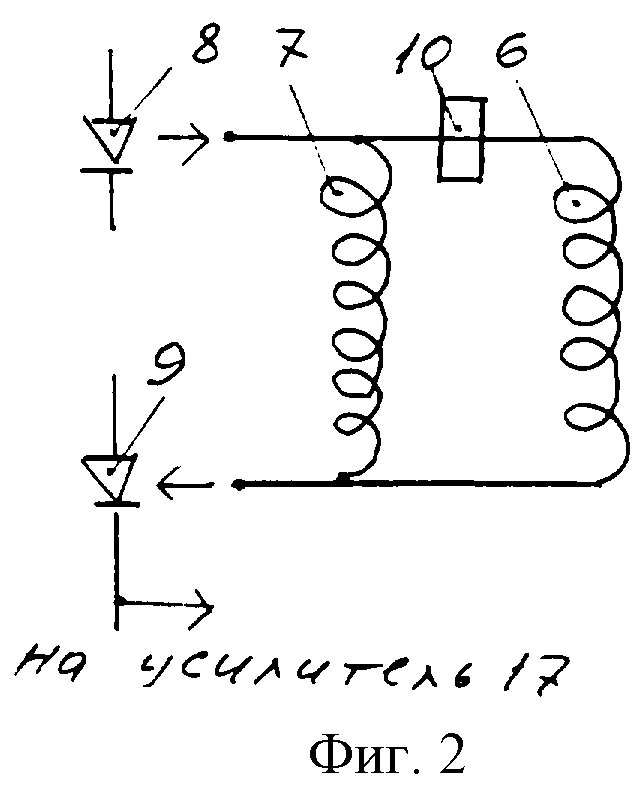
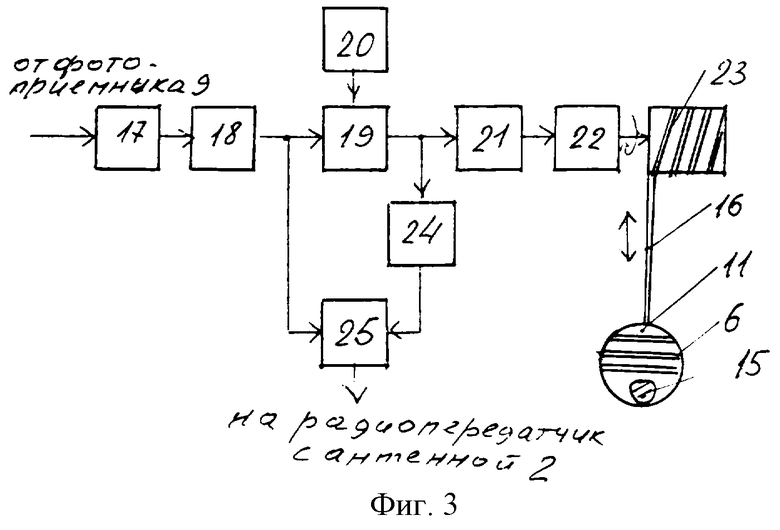
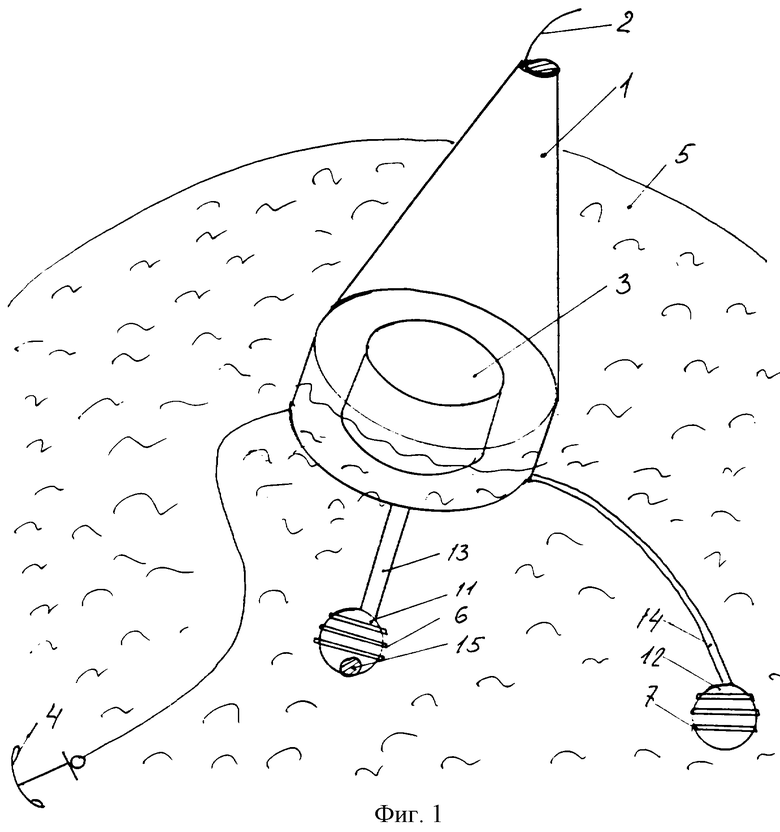
Изобретение поясняется чертежами, где на фиг.1 представлена общая схема устройства с жесткой связью буя положительной плавучести с полой упругой подложкой предметной волоконной катушки и с мягкой связью буя с подложкой опорной волоконной катушки. На фиг.2 представлена оптическая схема интерферометра волоконно-оптического преобразователя устройства. На фиг.3 представлена блок-схема электронной аппаратуры для случая мягкой связи буя положительной плавучести с полой упругой подложкой.
Устройство контроля интенсивности морского волнения содержит радиофицированный буй 1 положительной плавучести (фиг.1) с радиоантенной 2, внутри которого расположены блоки электронной аппаратуры волоконно-оптического преобразователя (фиг.2, 3) и блоки приемопередающей радиоаппаратуры (не выделены).
Все перечисленные элементы заключены в герметичный контейнер 3, расположенный внутри буя 1.
Буй 1 положительной плавучести заякорен с помощью якорного устройства 4 на исследуемой морской акватории 5 (фиг.1).
Имеется также волоконно-оптический преобразователь параметров морского волнения, выполненный в виде предметной (6) и опорной (7) волоконных катушек, оптически согласованных с источником 8 когерентного света и фотоприемником 9 в интерферометр, собранный, например, по схеме Цендера-Маха (фиг.2).
Интерферометр снабжен фазосдвигающим устройством 10, расположенным в одной из волоконных катушек.
Волоконные катушки 6, 7 интерферометра намотаны на две сферические подложки 11, 12 (фиг.1), связанные одной или двумя независимыми механическими связями с буем 1 положительной плавучести.
На фиг.1 представлен случай, когда подложка 11 предметной волоконной катушки соединена жесткой связью 13 с буем 1, а подложка 12 соединена с буем 1 мягкой связью 14.
Сферическая подложка 11 выполнена полой из упругого материала преимущественно из нержавеющей стали. Предметная катушка 6 намотана на подложку 11 с натягом. Внутри подложки 11 расположена инерционная масса 15, выполненная преимущественно в виде металлического шарика.
Размеры инерционной массы 15 и подложки 11 выбираются исходя из того, чтобы при волнении поверхности моря механические колебания шарика достигали диаметрального размера подложки 6.
Механическая связь подложки 6 может быть выполнена и мягкой (фиг.3). В этом случае сферическая подложка 11 отрицательной плавучести подвешивается на кабель-трос 16 к бую 1 положительной плавучести и колеблется под действием морского волнения независимо от буя 1.
Интенсивность колебания подложки 6 зависит от глубины ее погружения относительно плавающего буя 1. Для того, чтобы выходной сигнал интерферометра не выходил за квазилинейный диапазон преобразования, в электронной аппаратуре (фиг.3) предусмотрена система автоматического заглубления и подъема подложки 6 в зависимости от интенсивности морского волнения.
Электронная аппаратура (фиг.3) содержит усилитель 17, соединенный входом с выходом фотоприемника 9 (фиг.2), интегратор 18, компаратор 19, двухуровневый источник 20 опорных напряжений, блок 21 управления исполнительным органом 22 спускоподъемного устройства, представленого на чертеже в виде барабана 23. Электронная аппаратура также включает в себя масштабирующее устройство 24 и регистратор 25.
В одном из вариантов устройства механическая связь 14 сферической подложки 12 выполняется с возможностью изменения заглубления подложки относительно буя 1 положительной плавучести. Для этого буй 1 снабжается еще одним спускоподъемным устройством, управляемым по радиоканалу или необходимое заглубление подложки 12 устанавливается перед эксплуатацией устройства заранее. Глубина погружения сферической подложки 12 в этом варианте исполнения устройства должна быть такой, чтобы поверхностные волны не влияли на опорную волоконную катушку 7.
Электронные блоки 17...21, 24, 25 особенностей не имеют. Электрические связи между блоками описаны выше и представлены на фиг.3.
Источник 8 когерентного света и фотоприемник 9 можно располагать в буе 1 или в полой подложке 11.Оптическая связь всех элементов интерферометра осуществляется по одному и тому же оптическому волокну.
Постоянная времени интегрирования интегратора 18 выбирается, исходя из достаточного сглаживания выходного сигнала усилителя 17 для его последующего сравнения с двумя опорными напряжениями, задаваемыми двухуровневым источником 20 опорных напряжений. Величина опорных напряжений задает рабочий квазилинейный участок работы интерферометра, начальная разность фаз, которого предварительно настраивается на 90° с помощью фазосдвигающего устройства 10.
Блок 21 управления преобразует выходной сигнал с компаратора 19 (сравнивающее устройство) в необходимый для работы исполнительного органа 22 вид. Он может быть выполнен в виде усилителя постоянного тока, если в качестве исполнительного органа 22 применяется электродвигатель (в частности шаговый), на ось вращения которого насажен барабан 23.
Выход регистрирующего устройства 25 соединен с модулирующим входом радиопередатчика (не показан) с антенной 2.
Блоки питания (не показаны) включаются по радиосигналу с надводного центра управления и регистрации (не показан).
Связь буя 1 с надводным центром управления и регистрации может осуществляться по волоконной линии связи (не показана). В этом случае оптический сигнал с интерферометра помимо фотоприемника 9 направляется на вход волоконной линии связи (данный вариант на чертеже не представлен).
Устройство работает следующим образом.
Перед эксплуатацией устройство проходит метрологические испытания на предмет выбора оптимальных величин заглубления предметной и опорной волоконных катушек 6, 7.
На приемопередающую радиоантенну 2 направляется командный сигнал для включения в работу электронной аппаратуры и волоконно-оптического интерферометра, располагаемых в герметичном контейнере 3 буя 1.
Находящаяся внутри упругой сферической подложки 11 инерционная масса 15, ударяясь при наклонах буя о стенки подложки, вызывает характерный акустический сигнал, приводящий к дополнительной разности фаз интерферирующих лучей на выходе интерферометра. После детектирования оптического сигнала фотоприемником 9 и усиления электрического сигнала усилителем 17, последний поступает на интегратор 18, в котором сглаживается и преобразуется в постоянное напряжение, величина которого пропорциональна интенсивности морского волнения. Полученный сигнал поступает на регистратор и радиопередатчик с антенной 2.
При этом различные виды помех: гидроакустические шумы моря, шумы от скоростного напора морской среды, пульсаций плотности, температуры, солености не будут сказываться на результаты измерений, поскольку одинаково воздействуют на предметную и опорную волоконные катушки 6, 7.
В случае, изображенным на фиг.1 (жесткая связь подложки 11 с буем 1), устройство будет регистрировать сравнительно низкочастотные колебания морского волнения, обусловленные колебаниями буя 1.
В случае, представленным на фиг.3 (мягкая связь подложки 11 с буем 1), подложка 11 будет совершать самостоятельные по отношению к бую 1 колебания, в том числе и более высокочастотные по сравнению с описанным выше случаем.
При мягкой связи подложки 11 с буем 1 появляется возможность регулировки величины заглубления полой подложки 11 в зависимости от интенсивности морского волнения на акватории 5. При этом интерферометр работает на максимально возможной величине входного сигнала без опасения зашкаливания прибора.
Как известно, квазилинейный участок преобразования в интерферометре по разности фаз занимает примерно величину ±25°. Если выходной сигнал интегратора 18 превышает первую пороговую величину двухуровневого источника 20 опорных напряжений, то на выходе компаратора 19 появляется выходной сигнал, который после его усиления в блоке 21 управления подается на исполнительный орган 22. Последний, таким образом, воздействует на барабан 23 спускоподъемного устройства, что сферическая подложка 11 опускается на заданную величину (если исполнительный орган выполнен, например, в виде шагового двигателя) и величина заглубления предметной волоконной катушки 7 увеличивается. Что приводит к уменьшению входного сигнала на интерферометр.
Одновременно тот же выходной сигнал с компаратора 19 направляется через масштабирующее устройство 24 на вход регистратора 25, соответственно изменяя его чувствительность (т.е. регистратор 25 будет работать по другой шкале).
Если входной сигнал на интерферометре будет меньше заданной пороговой величины, то сравнение выходного сигнала с интегратора 18 будет вестись в компараторе 19 со вторым пороговым значением напряжения двухуровневого источника 20 опорных напряжений. На выходе компаратора 19 появляется сигнал другой полярности, который через блок 21 управления воздействует на исполнительный орган 22, уменьшая величину заглубления подложки 11 с помощью спускоподъемного устройства.
Таким образом, интерферометр всегда работает на квазилинейном участке своей выходной кривой преобразования, которая, как известно, является синусоидой.
Подложка 12 с опорной волоконной катушкой 7 может в различных вариантах исполнения располагаться на той же механической связи, что и полая подложка 11 с предметной волоконной катушкой 6, или на самостоятельной жесткой или мягкой механической связи, как показано на фиг.1.
В случае мягкой механической связи наиболее оптимальной величиной заглубления подложки 12 будет такая, на которой полностью отсутствует воздействие морского волнения на опорную волоконную катушку 7 интерферометра. Такое заглубление задается заранее перед эксплуатацией устройства с помощью самостоятельного спускоподъемного устройства подложки 12 (не показано).
Следует отметить, что в отличие от прототипа в заявленном устройстве проводится не измерение параметров морского волнения, например, волнового давления, пропорциональное силовому воздействию морских волн на буй 1 или подложку 6.
Поскольку в данном техническом решении регистрируются силовое воздействие морских волн с различных направлений, то данный контроль интенсивности морских волн будет осуществляться наиболее достоверно по сравнению с прототипом при любом варианте исполнения устройства.
Этим достигается поставленный технический результат.
Источники информации
1. Европейский патент ЕПВ №0106777, кл. G 01 Р 13/02, G 01 P 15/00, 1984
2. Патент РФ №2112943, кл.G 01 L 11/00, 1998 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОГИДРОФОН | 2003 |
|
RU2231088C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ СЕЙСМОПРИЁМНИК | 2002 |
|
RU2219567C1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2002 |
|
RU2231033C2 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ВНУТРЕННИХ ВОЛН В МОРСКОЙ СРЕДЕ | 2002 |
|
RU2231026C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ТЕРМОАНЕМОМЕТР | 2005 |
|
RU2287829C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 1993 |
|
RU2061226C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР САНЬЯКА ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 1994 |
|
RU2107282C1 |
| СИСТЕМА ДЛЯ ТРАЛОВОГО РЫБОПРОМЫСЛА | 2002 |
|
RU2238644C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ОКЕАНЕ | 1995 |
|
RU2105955C1 |
Изобретение относится к океанологической технике и может быть использовано для дистанционного контроля состояния морской поверхности. Существо изобретения заключается в том, что на буе положительной плавучести закрепляются две сферические подложки отрицательной плавучести. Первая сферическая подложка выполняется полой и упругой, на ее поверхности с натягом закрепляется предметная (измерительная) волоконная катушка интерферометра. Опорная катушка интерферометра наматывается на вторую сферическую подложку. Внутри полой подложки располагают инерционную массу, например, в виде металлического шарика. Обе подложки располагаются на исследуемой морской акватории и подвергаются воздействию морских волн. На выходе интерферометра будет появляться сигнал, пропорциональный интенсивности морского волнения. Техническим результатом является получение независимой от направления информации о колебаниях морских волн. 5 з.п. ф-лы, 3 ил.
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВОЛНОВОГО ДАВЛЕНИЯ У ПОВЕРХНОСТИ МОРЯ | 1996 |
|
RU2112943C1 |
| Способ получения 2-гидроперфторпропилена | 1956 |
|
SU106777A1 |
| RU 2075040 С1, 10.03.1997 | |||
| US 4135394 А, 23.01.1979 | |||
| US 3769838 А, 06.11.1973 | |||
| JP 10148524 А, 02.06.1998. | |||

