I. Область техники
Настоящее изобретение относится к системе связи. Более конкретно, настоящее изобретение относится к новому и усовершенствованному способу и устройству для синхронизации базовой станции посредством сигналов, передаваемых от подвижной станции, которая находится параллельно на связи с синхронизируемой базовой станцией.
II. Предшествующий уровень техники
Использование способа модуляции многостанционного доступа с кодовым разделением каналов (CDMA) является только одной из нескольких технологий для поддерживания связи, в которой присутствует большое количество системных пользователей. Хотя известны другие способы, такие как многостанционный доступ с временным разделением каналов (TDMA), многостанционный доступ с частотным разделением каналов (FDMA), и схемы модуляции AM, такие как система с одной боковой полосой с сжатием/расширением амплитуды (ACSSB), CDMA имеет значительные преимущества перед этими другими технологиями модуляции. Использование способа CDMA в системах связи множественного доступа описано в патенте США № 4901307, озаглавленном "Система связи множественного доступа с передачей сигналов в широком спектре с использованием спутниковых или наземных ретрансляторов", и патенте США № 5103459, озаглавленном "Система и способ для генерации форм волны сигнала в сотовой телефонной системе CDMA", оба из которых переданы правопреемнику настоящего изобретения и включены сюда в виде ссылки. Способ для обеспечения подвижной связи CDMA был стандартизован в Соединенных Штатах Ассоциацией промышленности связи в стандарте TIA/EIA/IS-95-A, озаглавленном "Стандарт совместимости станций на основе подвижных станций для двухрежимной широкополосной сотовой системы с передачей сигнала в широком спектре", который называется здесь как IS-95.
В только что упомянутых патентах описывается способ множественного доступа, в котором большое количество пользователей подвижных станций, каждая из которых содержит приемопередатчик, поддерживают связь через спутниковые ретрансляторы или наземные базовые станции (известные также как сотовые базовые станции или сотовые узлы), используя сигналы связи многостанционного доступа с кодовым разделением каналов (CDMA) с передачей сигналов в широком спектре. При использовании связи CDMA частотный спектр может быть повторно использован многократно, таким образом позволяя увеличение количества пользователей в системе. Использование способа CDMA дает значительно большую спектральную эффективность, чем может быть достигнута при использовании других способов множественного доступа.
Способ для одновременной демодуляции данных, которые проходят по разным трактам распространения от одной базовой станции, и для одновременной демодуляции данных, избыточно подаваемых от более чем одной базовой станции, описан в патенте США № 5109390 (патенте `390), озаглавленном "Приемник разнесения в системе сотовой связи CDMA", переданном правопреемнику настоящего изобретения и включенном сюда в виде ссылки. В патенте `390 отдельно демодулированные сигналы объединяются, чтобы обеспечить оценку передаваемых данных, которые имеют большую надежность, чем данные, демодулированные каким-либо одним трактом или от какой-либо одной базовой станции.
Эстафетные передачи могут быть разделены на две категории - жесткие передачи и мягкие передачи. В жесткой передаче, когда подвижная станция покидает исходную базовую станцию и входит в область базовой станции пункта назначения, подвижная станция прерывает свой канал связи с исходной базовой станцией и после этого устанавливает новый канал связи с базовой станцией пункта назначения. При мягкой передаче подвижная станция завершает установление канала связи с базовой станцией пункта назначения до прекращения канала связи с исходной базовой станцией. Таким образом, при мягкой эстафетной передаче, подвижная станция в течение некоторого периода времени излишне поддерживает связь как с исходной базовой станцией, так и с базовой станцией пункта назначения.
При мягких передачах вероятность прекращения разговора гораздо меньше, чем при жестких передачах. Кроме того, когда подвижная станция передвигается вблизи границы зоны обслуживания базовой станции, она может выполнять повторные запросы на эстафетную передачу в ответ на небольшие изменения в среде передачи. Эта проблема, называемая пинг-понговым переключением, также значительно снижается мягкой передачей. Процесс осуществления мягкой эстафетной передачи подробно описан в патенте США № 5101501, озаглавленном "Способ и система для обеспечения мягкой эстафетной передачи при соединении в сотовой телефонной системе CDMA", переданном правопреемнику настоящего изобретения и включенном сюда в виде ссылки.
Усовершенствованная техника мягкой эстафетной передачи описана в патенте США № 5267261, озаглавленном "Мягкая эстафетная передача, поддерживаемая подвижной станцией, в системе сотовой связи CDMA", переданном правопреемнику настоящего изобретения и включенном сюда в виде ссылки. В системе по патенту `261 процесс мягкой эстафетной передачи усовершенствован путем измерения уровня "пилотных" сигналов, передаваемых каждой базовой станцией, в подвижной станции. Эти измерения уровня пилотного сигнала помогают в процессе мягкой эстафетной передачи путем облегчения идентификации подходящих базовых станций, являющихся кандидатами для эстафетной передачи.
Кандидаты из базовых станций могут быть разделены на четыре группы. Первая группа, называемая Активным набором, содержит базовые станции, которые в текущее время находятся в связи с подвижной станцией. Вторая группа, называемая Набором кандидатов, содержит базовые станции, сигналы от которых были определены как имеющие достаточный уровень, чтобы использоваться подвижной станцией, но в текущее время они не используются. Базовые станции добавляются к Набору кандидатов, когда их измеренная энергия пилотного сигнала превосходит заданный порог Т. Третья группа есть набор базовых станций, которые находятся вблизи подвижной станции (и которые не включены в Активный набор или Набор кандидатов). И четвертая группа - это Остальной набор, который состоит из всех остальных базовых станций.
В IS-95 базовая станция-кандидат отличается фазовым сдвигом псевдошумовой (ПШ) последовательности пилотного канала. Когда подвижная станция осуществляет поиск, чтобы определить уровень пилотного сигнала от базовой станции-кандидата, она выполняет операцию корреляции, в которой отфильтрованный принятый сигнал коррелируется к набору гипотез смещения ПШ. Способ и устройство для выполнения операции корреляции подробно описаны в совместно рассматриваемой заявке на патент США № 08/687694, поданной 26 июля 1996 г., озаглавленной "Способ и устройство для выполнения поискового захвата в системе связи CDMA", которая передана правопреемнику настоящего изобретения и включена сюда в виде ссылки.
Задержка распространения между базовой станцией и подвижной станцией неизвестна. Эта неизвестная задержка создает неизвестный сдвиг в ПШ кодах. Процесс поиска пытается определить неизвестный сдвиг в ПШ кодах. Чтобы выполнить это, подвижная станция сдвигает по времени выходной сигнал генераторов ПШ кода его устройства поиска. Диапазон поискового сдвига называется окном поиска. Окно поиска центрировано около гипотезы ПШ сдвига. Базовая станция передает к подвижной станции сообщение, указывающее ПШ сдвиги пилотных сигналов базовых станций, находящихся в физической близости от нее. Подвижная станция будет центрировать свое окно поиска около гипотезы ПШ сдвига.
Подходящий размер окна поиска зависит от нескольких факторов, включая приоритет пилотного сигнала, быстродействие процессоров поиска и ожидаемое рассеяние задержки поступления сигнала по многим трактам. Стандарты CDMA (IS-95) определяют три параметра окна поиска. Поиск пилотных сигналов в Активном наборе и Наборе кандидатов управляется Окном Поиска "А". Пилотные сигналы Соседнего набора ищутся в окне "N" и пилотные сигналы Остального набора ищутся в окне "R". Размеры окна устройства поиска приведены в таблице, где элементарная посылка равна 1/1, 2288 МГц.
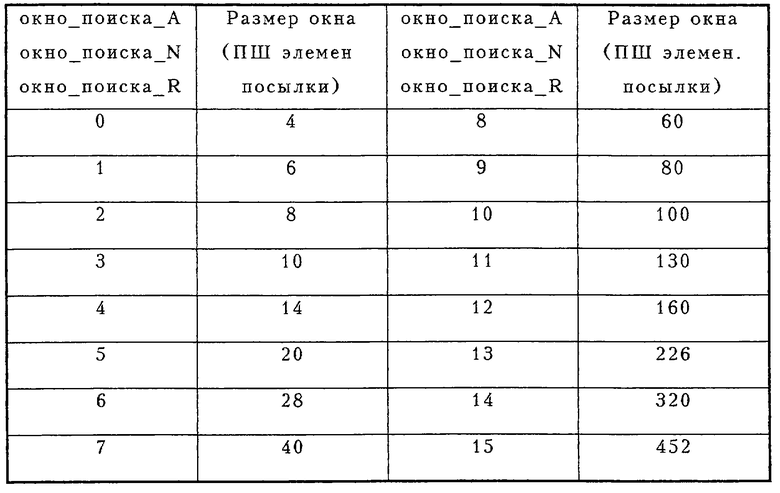
Размер окна является оптимально выбранным соотношением между скоростью поиска и вероятностью пропуска сильного тракта, лежащего вне окна поиска.
Базовая станция передает к подвижной станции сообщение, которое определяет гипотезу ПШ, которую подвижная станция должна искать относительно своего смещения ПШ. Например, исходная базовая станция может дать указание подвижной станции искать пилотный сигнал на 128 ПШ элементарных посылок впереди своего ПШ сдвига. Подвижная станция в ответ устанавливает свой демодулятор устройства поиска на 128 элементарных посылок впереди в выходном элементарном цикле и ищет пилотный сигнал, используя окно поиска, центрированное около определенного смещения. Когда подвижная станция получила указание искать гипотезу ПШ, чтобы определить ресурсы, доступные для выполнения эстафетной передачи, критичным становится то, что ПШ сдвиг пилотного сигнала станции назначения очень близок по времени к указанному сдвигу. Скорость поиска имеет критическое значение вблизи границ зоны обслуживания базовой станции, потому что задержки в завершении необходимых поисков могут привести к прерыванию разговоров.
В системах CDMA в Соединенных Штатах эта синхронизация базовой станции достигается обеспечением каждой базовой станции приемником Глобального Спутника Позиционирования (GPS). Однако имеются случаи, когда базовая станция не может принимать сигнал GPS. Например, в метро и тоннелях сигналы GPS уменьшаются до степени, которая препятствует их использованию для синхронизации по времени базовых станций или микробазовых станций. Настоящее изобретение обеспечивает способ и систему для обеспечения синхронизации по времени в этих обстоятельствах, где часть сети способна принимать централизованный хронирующий сигнал и достигать синхронизации от него, а часть базовых станций не способна принимать централизованный хронирующий сигнал.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение является новым и усовершенствованным способом и устройством для синхронизации по времени базовой станции, которая не способна принимать централизованный хронирующий сигнал, в сети, где некоторые из базовых станций способны принимать централизованный хронирующий сигнал. Опорная базовая станция имеет временную синхронизацию путем приема централизованного хронирующего сигнала или использования другого средства. В примере выполнения опорная базовая станция синхронизируется, используя приемник глобального спутника позиционирования (GPS). Подчиненная базовая станция не имеет возможности синхронизироваться, из-за, например, неспособности принимать централизованный хронирующий сигнал.
В настоящем изобретении подчиненная базовая станция достигает синхронизации с опорной базовой станцией через сообщения, передаваемые от подвижной станции и принимаемые подвижной станцией в области мягкой эстафетной передачи между опорной базовой станцией и подчиненной базовой станцией. Во-первых, опорная базовая станция измеряет двухстороннюю задержку прохождения сигнала между подвижной станцией и опорной базовой станцией. Затем подчиненная базовая станция ищет до тех пор, пока она не захватит сигнал, передаваемый подвижной станцией, называемый сигналом обратного канала связи. В ответ на получение сигнала обратного канала связи подчиненная базовая станция регулирует свое согласование по времени так, чтобы подвижная станция могла захватить ее сигнал, называющийся сигналом прямого канала связи. Этот шаг может быть не нужен, если погрешность согласования по времени в подчиненной базовой станции не является грубой.
Когда подвижная станция получает сигнал от подчиненной базовой станции, она измеряет и сообщает разницу между величиной времени, которое требуется для прохождения сигнала от опорной базовой станции до нее, и количеством времени, которое требуется сигналу для прохождения от подчиненной базовой станции до нее. Последнее измерение, которое требуется, это измерение подчиненной базовой станцией разности времени между моментом времени, когда она приняла сигнал обратного канала связи от подвижной станции, и моментом времени, когда она передала сигнал к подвижной станции.
Выполняется ряд вычислений над измеренными величинами времени, описанные здесь подробно, чтобы определить разницу времени в подчиненной базовой станции, и производится регулировка согласования по времени подчиненной базовой станции в соответствии с ними. Следует заметить, что все упомянутые измерения выполнены во время нормальной работы системы связи CDMA IS-95.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные особенности, цели и преимущества настоящего изобретения станут более понятными из подробного описания, приведенного ниже, со ссылкой на чертежи, на которых одинаковые ссылочные позиции соответственно указаны по всем чертежам и на которых:
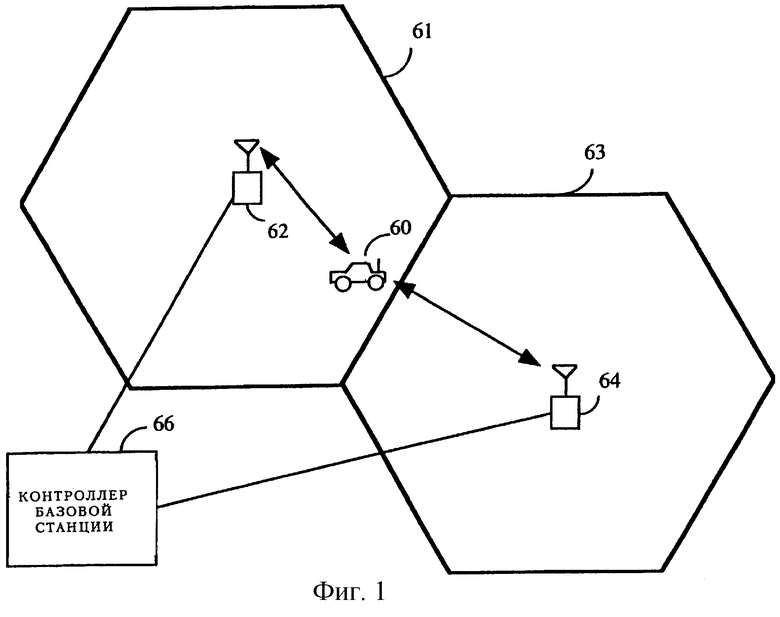
фиг.1 есть блок-схема, иллюстрирующая конфигурацию сети системы радиосвязи, содержащей опорную базовую станцию и подчиненную базовую станцию;
фиг.2 есть схема, иллюстрирующая различные передачи между подвижной станций, синхронной базовой станцией и асинхронной базовой станцией и соответствующие интервалы времени;
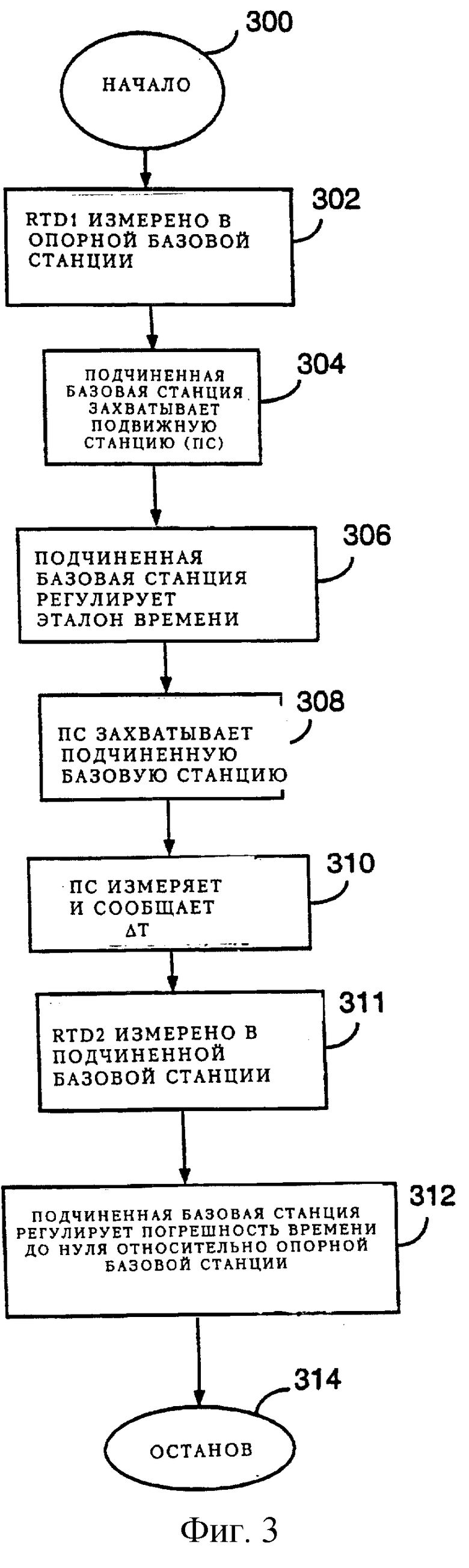
фиг.3 есть блок-схема, иллюстрирующая способ синхронизации базовой станции, которая неспособна принимать централизованный хронирующий сигнал;
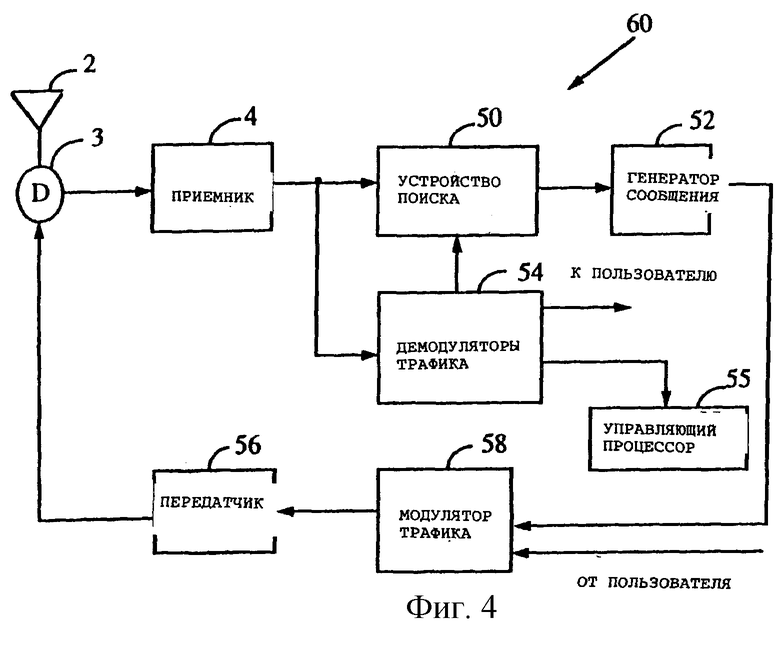
фиг.4 есть блок-схема подвижной станции согласно настоящему изобретению;
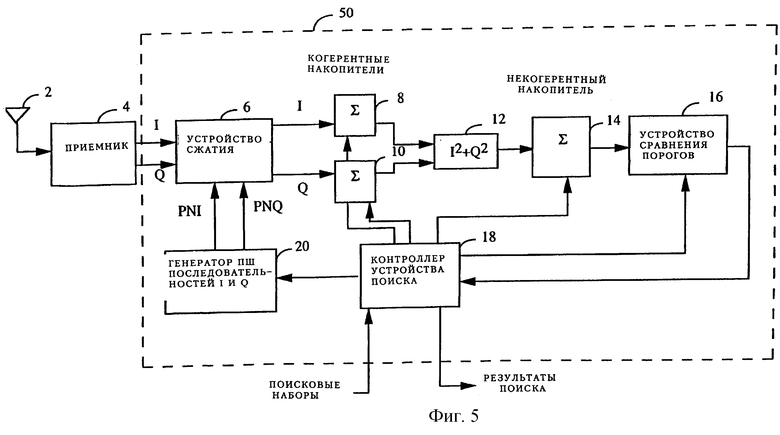
фиг.5 есть блок-схема устройства поиска в подвижной станции согласно настоящему изобретению;
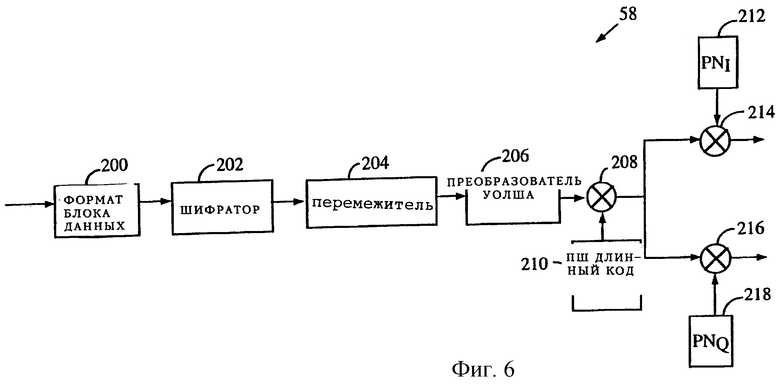
фиг.6 есть блок-схема модулятора канала трафика подвижной станции согласно настоящему изобретению;
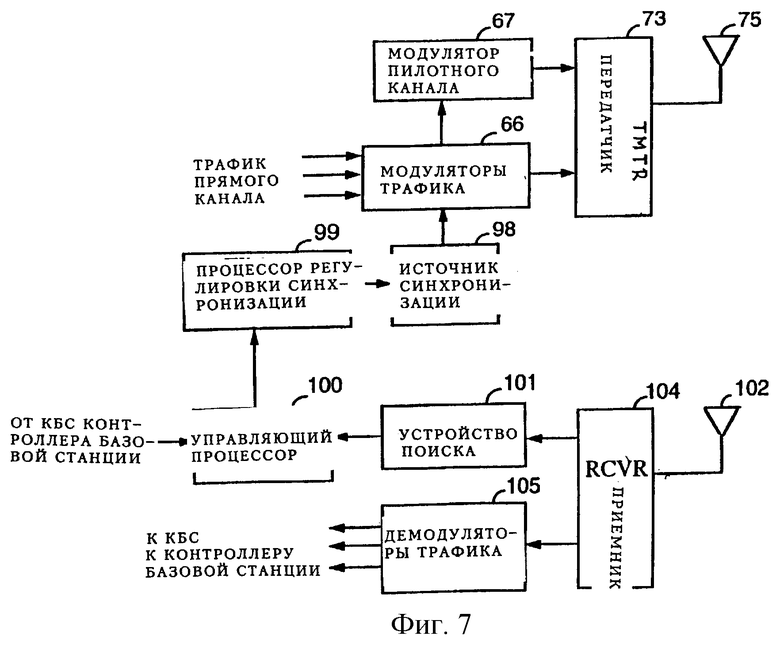
фиг.7 есть блок-схема базовой станции согласно настоящему изобретению;
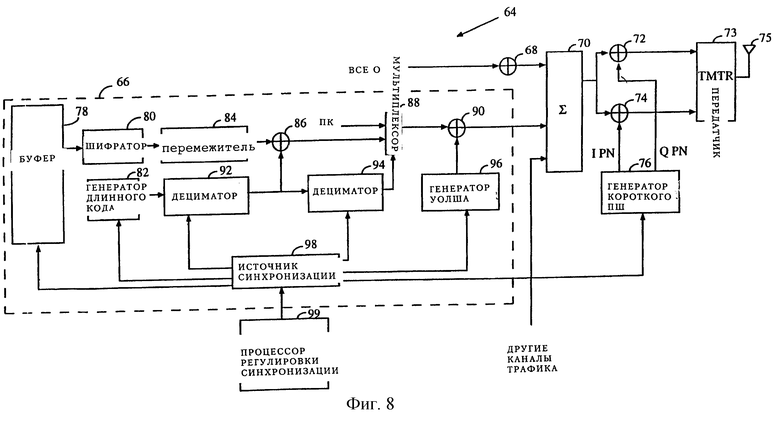
фиг.8 есть блок-схема системы передачи базовой станции согласно настоящему изобретению и
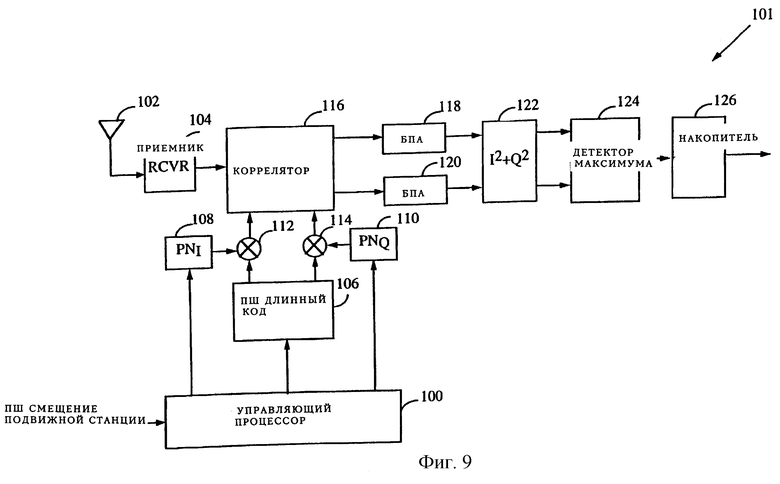
фиг.9 есть блок-схема системы приема базовой станции согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
I. Обзор вычисления погрешности согласования по времени
Ссылаясь на фиг.1, подвижная станция 60 находится в связи с базовой станцией 62, поскольку она примерно находится в пределах зоны обслуживания, очерченной границей 61 зоны обслуживания базовой станции. Базовая станция 62 синхронизирована с остальной частью сети посредством центральной системы согласования по времени, такой как глобальная система позиционирования (GPS). В противоположность этому, базовая станция 64 не синхронизирована с центральной системой согласования по времени. Контроллер 66 базовой станции направляет вызовы от КТСОП к базовой станции 62 или 64 посредством линии Т1 или другого средства. Кроме того, синхронизация частоты подается к базовой станции 64 через линии Т1.
В течение коротких периодов времени синхронизация частоты может быть обеспечена с приемлемой степенью точности через линии Т1 способами, хорошо известными в уровне техники. Однако в этих схемах для обеспечения частотной информации имеются общие сбои. Эти сбои приводят к погрешности согласования по времени, которые могут быть скорректированы использованием настоящего изобретения. Ввиду связи между фазой и частотой, нерегулярная коррекция фазы согласно настоящему изобретению позволит использование менее точных источником частоты, когда это необходимо.
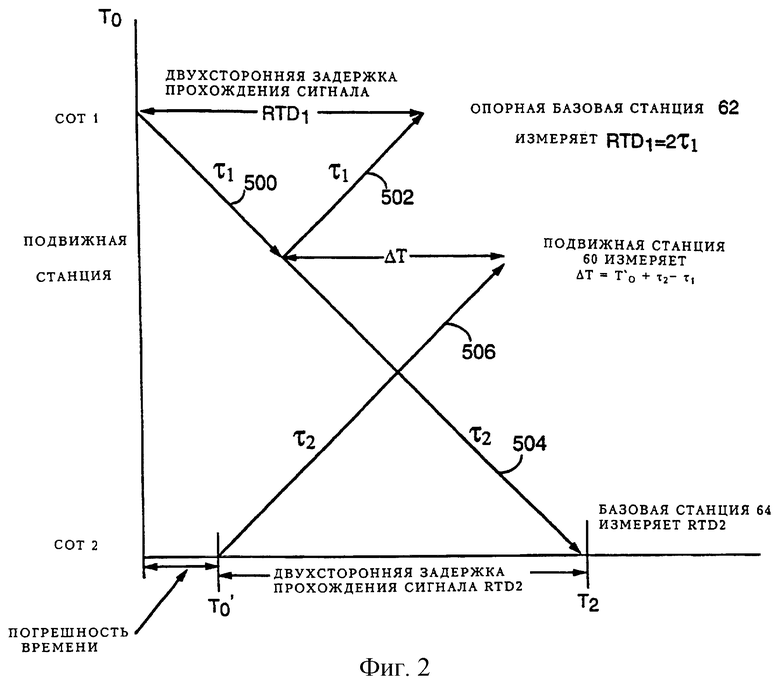
На фиг.2 показаны иллюстрации передачи и соответствующих интервалов времени, используемых для синхронизации согласования по времени подчиненной базовой станции 64 с синхронизированным согласованием по времени опорной базовой станции 62. Тракт сигнала 500 иллюстрирует передачу сигнала прямого канала связи от опорной базовой станции 62 к подвижной станции 60. Интервал времени, на котором происходит эта передача, обозначает τ1. В подвижной станции 60 начало передач блока данных на обратном канале связи согласовано по времени с началом поступления блока данных на прямом канале. Это согласование по времени стандартизовано в IS-95 и включено в оборудование, спроектированное в соответствии с этим, так что способы и устройства для выполнения этого согласования хорошо известны в уровне техники.
Передача 502 показывает передачу блока данных обратного канала связи от подвижной станции 60 к опорной базовой станции 62. Время, необходимое для сигнала 500, чтобы пройти от базовой станции 62 до подвижной станции 60 (τ1), равно времени, необходимому сигналу 502 для прохождения от базовой станции 62 к подвижной станции 60 (тоже τ1). Поскольку базовая станция 62 знает время, когда она передала сигнал 500, и знает время, когда она приняла сигнал 502, базовая станция 62 может вычислить время двухсторонней задержки прохождения сигнала (RTD1), которое является первой величиной, необходимой для вычисления погрешности по времени (τ`о-τо).
Тракт сигнала 504 есть передача сигнала обратного канала связи от подвижной станции 60, идущего по другому пути распространения к подчиненной базовой станции 64. Время, требующееся сигналу 504 для прохождения от подвижной станции 60 к подчиненной базовой станции 64, обозначено τ2. Время, за которое сигнал 504 обратного канала связи достигает базовой станции 64, обозначено Т2. Время, требующееся сигналу 506 прямого канала связи для прохождения от базовой станции 64 к подвижной станции 60, также равно τ2. Кроме того, базовая станция 64 может измерить разность времени между моментом, когда она приняла сигнал обратного канала связи от подвижной станции 60, и моментом времени, когда она передала свой сигнал прямого канала связи к подвижной станции 60. Эта разность времени обозначена RTD2. Знание этих времен позволяет вычислить погрешность времени (τ`o-τo). Способ вычисления погрешности времени τ`o описан ниже.
Сначала из фиг.2 можно наблюдать, что

Проведя операции с членами уравнения (1) и (2), получим следующее:


Чтобы упростить написание, обозначим новую переменную RTD2 как

Из фиг.2 можно видеть, что

Поэтому

RTD2=2τ2-ΔT.
Путем подстановки можно видеть, что погрешность времени (T`o-Тo) равна




Поскольку базовая станция 64 знает величину своей погрешности согласования по времени (T`o-Тo), она регулирует свое согласование по времени так, чтобы синхронизировать его с согласованием по времени базовой станции 62. Эти измерения подвержены погрешностям, так что в предпочтительном варианте исполнения избыточно выполняется много измерений, чтобы гарантировать точность коррекции согласования по времени.
Теперь описываются способ и устройство для измерения каждой из необходимых в уравнении (12) величин.
II. Измерение двухсторонней задержки прохождения сигнала (RTD1)
На фиг.3 показана блок-схема, иллюстрирующая способ согласно настоящему изобретению для синхронизации подчиненной базовой станции 64 по времени с опорной базовой станцией 62. В шаге 300 способ синхронизации начинается с подвижной станцией 60, находящейся в связи с опорной базовой станцией 62 и в диапазоне, позволяющем проводить связь с подчиненной базовой станцией 64. В шаге 302 измеряется время двухсторонней задержки прохождения сигнала (RTD1), требующееся для сигнала, чтобы пройти от опорной станции 62 к подвижной станции 60 и обратно от подвижной станции 60 к опорной базовой станции 62. Это выполняется путем выравнивания границ блоков данных, принятых подвижной станцией 60, с границами блоков данных, переданных подвижной станцией 60. Способ и устройство для обеспечения этого выравнивания хорошо известны в уровне техники. Таким образом, двухсторонняя задержка прохождения сигнала (RTD1) измерена как разность времени между началом блоков данных, переданных опорной базовой станцией 62, и началом блоков данных, принятых опорной базовой станцией 62 от подвижной станции 60.
Ссылаясь на фиг.4, блоки данных прямого канала связи от опорной базовой станции 62 принимаются антенной 2 и подаются через дуплексор (антенный переключатель) 3 к приемнику (RCVR) 4. Приемник 4 преобразует с понижением частоты, отфильтровывает и усиливает принятый сигнал и подает его к устройству поиска 50 и демодуляторам трафика (TRAFFIC DEMODS) 54. Устройство поиска 50 ищет пилотные каналы в соответствии со списком соседних станций, переданным опорной базовой станцией 62. Список соседних станций передается как данные сигнализации на канале трафика от опорной базовой станции 62. Сигнал, показывающий начало принятых блоков данных от опорной базовой станции 62, подается к управляющему процессору 55. Управляющий процессор 55 генерирует и подает сигнал выравнивания по времени к модулятору 58 трафика, который выравнивает начало блоков данных, переданных от подвижной станции 60, с началом блоков данных, принятых в подвижной станции 60.
Блоки данных от пользователя подвижной станции 60 подаются к модулятору 58 трафика, который в ответ на синхронизирующий сигнал от управляющего процессора 55 выравнивает по времени блоки данных, переданные через передатчик (TMTR) 56, с блоками данных, принятыми подвижной станцией 60 от опорной базовой станции 62. Блоки данных обратного канала связи преобразуются с повышением частоты, фильтруются и усиливаются передатчиком 56, затем подаются через дуплексер 3 для передачи через антенну 2.
III. Захват подвижной станции подчиненной базовой станцией
Фиг.6 иллюстрирует модулятор 58 канала трафика подвижной станции 60. Блоки данных подаются к форматтеру 200 блоков данных. В иллюстрируемом варианте выполнения форматтер 200 блоков данных генерирует и присоединяет набор бит контроля циклическим избыточным кодом (CRC) и генерирует набор бит конца. В иллюстрируемом варианте выполнения форматтер 200 блоков данных следует протоколу формата блока данных, стандартизованному в IS-95 и подробно описанному в патенте США № 5600754, озаглавленном "Способ и система для расположения данных вокодера для маскирования сбоев, индуцированных каналом передачи", который передан правопреемнику настоящего изобретения и включен сюда в виде ссылки.
Форматированный блок данных подается к шифратору 202, который кодирует данные для коррекции ошибок и детектирования. В иллюстрируемом варианте выполнения шифратор 202 является сверточным шифратором. Закодированные символы данных подаются к перемножителю 204, который изменяет порядок следования символов в соответствии с заданным форматом перемежения. Символы с измеренным порядком следования подаются к преобразователю Уолша 206. В иллюстрируемом варианте выполнения преобразователь Уолша 206 принимает восемь кодированных символов и преобразует этот набор символов в последовательность Уолша из 64 элементарных посылок. Символы Уолша подаются к средству 208 расширения, которое расширяет символы Уолша в соответствии с длинным кодом расширения. Генератор 210 длинного ПШ кода генерирует псевдошумовую (ПШ) последовательность, которая расширяет данные и отделяет эти данные от данных обратного канала, передаваемых от других подвижных станций, находящихся по соседству.
В иллюстрируемом варианте выполнения данные передаются в соответствии с форматом модуляции квадратурной фазовой манипуляции (QPSK), в котором каналы I и Q расширяются в соответствии с короткой ПШ последовательностью. Расширенные данные подаются к средствам расширения 214 и 216, которые выполняют вторую операцию расширения на данных в соответствии с короткой ПШ последовательностью, выданной ПШ генераторами (PNI и PNQ) 212 и 218 соответственно.
В шаге 304 подчиненная базовая станция 64 получает сигнал обратного канала связи, переданный подвижной станцией 60. Контроллер 66 базовой станции посылает сигнал к подчиненной базовой станции 64, показывая смещение ПШ кода, которое подвижная станция 62 использует, чтобы расширить свой сигнал обратного канала связи. В ответ на этот сигнал от контроллера 66 базовой станции подчиненная базовая станция 64 выполняет поиск для подвижной станции 60, центрированно около сдвига ПШ, указанного сигналом от контроллера 66 базовой станции.
В иллюстрируемом варианте выполнения банк подчиненной базовой станции 64 загружает сигналы генератора 106 ПШ длинного кода и генераторов 108 и 110 ПШ короткого кода ее устройства поиска (показанных на фиг.9) в соответствии с сигналом от контроллера 66 базовой станции. Процесс работы устройства поиска подчиненной базовой станции 64 подробно описан здесь далее.
Фиг.7 иллюстрирует устройство подчиненной базовой станции 64. В подчиненной базовой станции 64 принимается сигнал от контроллера 66 базовой станции, показывающий ПШ подвижной станции 60. Это сообщение подается управляющему процессору 100. В ответ на это управляющий процессор 100 вычисляет диапазон поиска окна, центрированного у определенного смещения ПШ. Управляющий процессор 100 подает параметры поиска к устройству поиска 101, и в ответ на эти параметры подчиненная базовая станция 64 проводит поиск сигнала, передаваемого подвижной станцией 60. Сигнал, принятый антенной 102 подчиненной базовой станции 64, подается к приемнику 104, который преобразует с понижением частоты, фильтрует и усиливает принятый сигнал и подает его к устройству поиска 101. Кроме того, принятый сигнал подается к демодуляторам 105 трафика, которые демодулируют данные трафика обратного канала и подают эти данные к контроллеру 66 базовой станции. Контроллер 66 базовой станции, в свою очередь, подает их к коммутируемой телефонной сети общего пользования (КТСОП).
Фиг.9 более подробно иллюстрирует устройство поиска 101. Демодуляция сигнала обратного канала связи подробно описана в одновременно рассматриваемой заявке на патент США № 08/372632, поданной 13 января 1995 г., озаглавленной "Архитектура демодулятора сотового узла для системы связи множественного доступа с передачей сигналов в широком спектре", и совместно рассматриваемой заявке на патент США № 08/316.177, поданной 30 сентября 1994 г., озаглавленной "Многоканальный процессор поиска для системы связи множественного доступа с передачей сигналов в широком спектре", обе из которых переданы правопреемнику настоящего изобретения и включены сюда в виде ссылок. Оценка смещения ПШ подвижной станции 60 подается к управляющему процессору 100 от контроллера 66 базовой станции. В ответ на оценку ПШ смещения, поданную контроллером 66 базовой станции, управляющий процессор 100 генерирует первоначальную гипотезу длинной ПШ последовательности и первоначальную гипотезу короткой ПШ последовательности для поиска, который должен быть выполнен подчиненной базовой станцией 64. В иллюстрируемом варианте выполнения банк данных управляющего процессора 100 загружает регистры сдвига ПШ генераторов 106, 108 и 110.
Сигнал, принятый антенной 102, преобразуется с понижением частоты, фильтруется, усиливается и подается к коррелятору 116. Коррелятор 116 коррелирует принятый сигнал к объединенным гипотезам длинной и коротких ПШ последовательностей. В иллюстрируемом варианте выполнения гипотеза ПШ последовательности генерируется путем умножения коротких ПШ гипотез, генерируемых ПШ генераторами 108 и 110, на длинную ПШ последовательность, генерируемую ПШ генератором 106. Одна из объединенных гипотез ПШ последовательности используется для сжатия канала I, а другая используется для сжатия канала Q принятого сигнала QPSK.
Два ПШ сжатых сигнала подаются к процессорам быстрого преобразования Адамара (БПА) (FHT) 118 и 120. Конструкция и работа процессоров быстрого преобразования Адамара подробно описана в одновременно рассматриваемой заявке на патент США № 08/173460, поданной 22 декабря 1993 г., озаглавленной "Способ и аппаратура для выполнения быстрого преобразования Адамара", которая передана правопреемнику настоящего изобретения и включена сюда в виде ссылки. Процессоры БПА 118 и 120 коррелируют сжатые сигналы со всеми возможными символами Уолша, чтобы создать матрицу результирующих амплитуд для средства 122 вычисления энергии (I2+ Q2). Средство 122 вычисления энергии вычисляет энергию элементов матрицы амплитуд и подает величины энергии к детектору 124 максимума, который выбирает корреляцию максимальной энергии. Энергии максимальной корреляции подаются к накопителю 126, который накапливает энергию для множества символов Уолша, и на основании этих накопленных значений энергии определяется, может ли подвижная станция 60 быть захвачена в этом ПШ смещении.
IV. Регулировка начального согласования по времени подчиненной базовой станцией
Когда подвижная станция 60 захвачена, тогда в блоке 306 подчиненная базовая станция 64 регулирует свое согласование по времени так, чтобы подвижная станция 60 была способна успешно получать ее передачи прямого канала. Подчиненная базовая станция 64 вычисляет регулировку начального согласования по времени путем определения разности между ПШ смещением, при котором она захватила сигнал обратного канала связи от подвижной станции 60, и ПШ смещением, которое использует опорная базовая станция 62 для приема сигнала обратного канала связи от подвижной станции 60. Используя эту разность ПШ смещений, подчиненная базовая станция 64 регулирует согласование по времени своего пилотного сигнала таким образом, что когда подвижная станция 60 ищет ее пилотный сигнал, он будет находиться внутри окна поиска подвижной станции 60.
V. Захват подчиненной базовой станции подвижной станцией
При поиске сигнала подвижной станции подчиненной базовой станции 64 необходимо иметь какую-либо индикацию времени. В предпочтительном варианте выполнения погрешность времени подчиненной базовой станции 64 поддерживается равной 1 мс или менее 1 мс посредством альтернативной схемы синхронизации. Имеются схемы, которые позволяют подчиненной базовой станции 64, которая неспособна принимать сигнал GPS, поддерживать время с уровнем меньшей точности. Один возможный способ получения степени начальной синхронизации состоит в ручной установке времени подчиненной базовой станции 64 с определенными интервалами. Второй способ состоит в установлении времени с использованием приемника WWV, исполнение которого хорошо известно в уровне техники. В отличие от сигнала GPS, WWV централизованный сигнал времени передается на очень низкой частоте и способен проникать в туннели и метро. Однако приемники WWV не способны обеспечить степень синхронизации по времени, необходимую для обеспечения связи CDMA.
В иллюстрируемом варианте выполнения подчиненная базовая станция 64 регулирует свое согласование по времени в соответствии с предположением, что подвижная станция 60 расположена непосредственно по соседству с подчиненной базовой станцией 64. Таким образом, начальная регулировка синхронизации выполняется с предположением, что не будет задержки распространения между подчиненной станцией 64 и подвижной станцией 60. После этого подчиненная базовая станция 64 регулирует свои генераторы 72 и 74 ПШ последовательностей вперед по времени, что учитывает большее и большее время задержки распространения между подчиненной базовой станцией 64 и подвижной станцией 60. Когда подвижная станция 60 захватила пилотный канал подчиненной базовой станции 64, используя обычные процедуры, может быть выполнена окончательная регулировка согласования по времени для подчиненной базовой станции 64 в соответствии с описанными выше вычислениями.
Как известно в уровне техники и как стандартизовано в IS-95, пилотные каналы различных базовых станций различаются друг от друга фазой их ПШ генераторов. Опорная базовая станция 62 дает указание подвижной станции 60 искать подчиненную базовую станцию 64 через список соседних станций. Опорная базовая станция 62 указывает посредством данных сигнализации, что пилотный сигнал подчиненной базовой станции 64 может быть захвачен на смещении ПШ фазы, который описан относительно принятого ПШ смещения опорной базовой станции 62. Это сообщение демодулируется и декодируется демодуляторами 54 трафика и подается к устройству поиска 50. В ответ устройство поиска 50 выполняет поиск, центрированный на смещении ПШ фазы около ПШ фазы, указанной в сигнале от опорной базовой станции 62.
Пилотный сигнал обычно генерируется регистром сдвига с линейной обратной связью, исполнение которого подробно описано в вышеупомянутых патентах. Для того, чтобы захватить пилотный сигнал от подчиненной базовой станции 64, подвижная станция 60 должна синхронизироваться к принятым сигналам от подчиненной базовой станции 64 как по фазе ϕ, так и по частоте ω. Цель работы устройства поиска состоит в нахождении фазы принятого сигнала ψ. Как описано ранее, относительно точная синхронизация частоты может быть подана к подчиненной базовой станции 64 посредством канала Т1 связи от контроллера базовой станции 66, как известно в уровне техники. Способ, которым подвижная станция определяет фазу принятого сигнала, состоит в проверке набора гипотез фазы, называемого окном поиска, и определении того, является ли одна из гипотез смещения правильной.
Фиг.5 более подробно иллюстрирует устройство поиска 50 подвижной станции. Сигнал широкого спектра принимается в антенне 2. Целью устройства является усиление синхронизации между псевдошумовыми (ПШ) последовательностями, генерируемыми генератором ПШ последовательностей 20, и принятым сигналом широкого спектра, который расширен идентичными ПШ последовательностями неизвестной фазы, переданным подчиненной базовой станцией 64. В иллюстрируемом варианте выполнения как генератор 76 пилотного сигнала (с фиг.7), так и ПШ генератор 20 являются регистрами сдвига максимальной длины, которые генерируют последовательности ПШ кода для расширения и сжатия пилотных сигналов соответственно. Таким образом, операция получения синхронизации между кодами, используемыми для сжатия принятого пилотного сигнала, и ПШ кодом расширения принятого пилотного сигнала, включает определение временного смещения регистра сдвига.
Сигнал широкого спектра подается антенной 2 к приемнику 4. Приемник 4 преобразует с понижением частоты, фильтрует, усиливает сигнал и подает сигнал к элементу 6 сжатия. Элемент 6 сжатия умножает принятый сигнал на ПШ код, генерируемый ПШ генератором 20. Благодаря случайной шумоподобной природе ПШ кодов, произведение ПШ кода и принятого сигнала должно быть в основном равно нулю, за исключением точки синхронизации.
Контроллер 18 устройства поиска подает гипотезу смещения к ПШ генератору 20. Гипотеза смещения определяется в соответствии с сигналом, переданным к подвижной станции 60 опорной базовой станцией 62. В иллюстрируемом варианте выполнения принятый сигнал модулируется с помощью квадратурной фазовой манипуляции (QPSK), так что ПШ генератор 20 подает ПШ последовательность для компонента модуляции I и отдельную последовательность для компонента модуляции Q к элементу 6 сжатия. Элемент 6 сжатия умножает ПШ последовательность на ее соответствующий компонент модуляции и подает два произведения выходных компонентов к когерентным накопителям 8 и 10.
Когерентные накопители 8 и 10 суммируют произведение по длине последовательности произведения. Когерентные накопители 8 и 10 реагируют на сигналы от контроллера 18 устройства поиска для переустановки, фиксации и установки периода суммирования. Суммы произведений подаются от сумматоров 8 и 10 к средству 12 возведения в квадрат. Средство 12 возведения в квадрат возводит в квадрат каждую из сумм и суммирует их вместе.
Сумма квадратов подается средством 12 возведения в квадрат к некогерентному объединителю 14. Некогерентный объединитель 14 определяет величину энергии с выхода средства 12 возведения в квадрат. Некогерентный накопитель 14 служит, чтобы противодействовать действию расхождения частот между передающими часами базовой станции и приемными часами подвижной станции, и помогает в детектировании статистики в среде замирания. Некогерентный накопитель 14 подает сигнал энергии к средству 16 сравнения. Средство 16 сравнения сравнивает величину энергии с заданными порогами, поданными средством 18 контроллера устройства поиска. Результаты каждого сравнения затем подаются обратно к контроллеру 18 устройства поиска. Результаты, поданные обратно к контроллеру 18 устройства поиска, включают как энергию корреляции, так и ПШ смещение, которое получается в измерении.
В настоящем изобретении контроллер 18 устройства поиска выдает ПШ фазу, при которой он синхронизируется к базовой станции 64. Это смещение используется для вычисления погрешности времени, как описано здесь далее.
В иллюстрируемом варианте выполнения, когда подвижная станция 60 захватывает подчиненную базовую станцию 64, она вычисляет разницу между моментом времени, когда она приняла сигнал от подчиненной базовой станции 64, и моментом времени, когда она получила сигнал от опорной базовой станции 62. Эта величина подается к генератору 52 сообщения, который генерирует сообщение, указывающее величину разницы. Сообщение передается как данные сигнализации на обратном канале к опорной базовой станции 62 и к подчиненной базовой станции 64, которые посылают сообщение обратно к контроллуру 66 базовой станции.
VI. Измерение задержки между передачей сигнала прямого канала связи от подчиненной базовой станции и приемом сигнала обратного канала связи в подчиненной базовой станции
В шаге 311 подчиненная базовая станция 64 измеряет разность времени между моментом, когда она принимает сигнал обратного канала связи от подвижной станции 60 (Т2), и моментом времени, когда она передает свой сигнал прямого канала связи к подвижной станции 60 (T1). Подчиненная базовая станция 64 записывает ПШ смещение в момент времени, когда она передает свой сигнал прямого канала связи, и после детектирования сигнала обратного канала связи от подвижной станции 60 вычисляет разность времени RTD2. В иллюстрируемом варианте выполнения эта вычисленная разность времени подается подчиненной базовой станцией 64 к контроллеру базовой станции 66 и вычисление регулировки согласования по времени проводится в (контроллере) базовой станции 66. Опытному специалисту будет понятно, что настоящее изобретение может быть легко распространено на случай, в котором вычисление выполняется в базовых станциях или подвижных станциях.
VII. Регулировка согласования по времени подчиненной базовой станции
Контроллер 66 базовой станции в ответ выполняет вычисление, описанное в уравнении (12), и посылает индикацию необходимой регулировки согласования по времени к подчиненной базовой станции 64. Ссылаясь снова к фиг. 7, сигнал регулировки согласования по времени принимается подчиненной базовой станцией 64 в управляющем процессоре 100. Управляющий процессор 100 генерирует и подает управляющий сигнал к процессору 99 регулировки синхронизации. Процессор 99 регулировки синхронизации генерирует сигнал, который изменяет время источника 98 синхронизации на величину, указанную в сигнале от контроллера 66 базовой станции.
Изобретение относится к системе связи. В настоящем изобретении подчиненная базовая станция достигает синхронизации с опорной базовой станцией через сообщение, переданное от подвижной станции и принятое подвижной станцией в области мягкой эстафетной передачи между опорной базовой станцией и подчиненной базовой станцией. Сначала опорной базовой станцией измеряется двухсторонняя задержка прохождения сигнала между подвижной станцией и опорной базовой станцией. Когда подвижная станция захватывает сигнал от подчиненной базовой станции, она измеряет и сообщает разницу между величиной времени, которое требуется для прохождения сигнала от опорной базовой станции до нее, и величиной времени, которое требуется сигналу для прохождения от подчиненной базовой станции до нее. Последним необходимым измерением является измерение подчиненной базовой станцией разности времени между моментом времени, когда она получает сигнал обратного канала связи от подвижной станции, и моментом времени, когда она передает сигнал к подвижной станции. Выполняется ряд вычислений над измеренными величинами времени, подробно описанный здесь, чтобы определить разность времени в подчиненной базовой станции, и в соответствии с ним выполняется регулировка согласования по времени подчиненной базовой станции. Технический результат заключается в обеспечении синхронизации по времени, когда часть сети способна принимать централизованный хронирующий сигнал и достигать синхронизации от него, а часть базовых станций не способна его принимать. 2 с. и 5 з.п.ф-лы, 9 ил.
| Экономайзер | 0 |
|
SU94A1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
RU2084916C1 |
| EP 0766417 A1, 02.04.1997 | |||
| US 5519710 А, 21.05.1996. | |||
