Изобретение относится к добыче полезных ископаемых со дна морей и океанов. Известен привод исполнительного механизма механогидравлического горного комбайна, включающий гидротурбину, маслонасос с механизмом управления, датчик давления, золотник и гидроцилиндры вертикальной и горизонтальной подачи, у которого дополнительно механизм управления насосом, золотник и датчик давления шарнирно связаны между собой посредством рычага, при этом механизм управления насосом размещен между золотником и датчиком давления (авт. свид. СССР № 922277, М. Кл.3 Е 21 С, 3/00, Б.И. №15, 1982 г.).
Недостатком известного привода является невозможность обеспечения жесткой кинематической связи гидравлической турбины и объемного насоса привода гусеничной тележки, что приводит к неустойчивой работе системы, а также снижает ее производительность.
Известна установка с самоходной тележкой для сбора конкреций в условиях дна Мирового океана, содержащая плавсредство, промежуточный и подводный модули, в последнем из которых самоходная тележка, барабан-рыхлитель с резцами, привод в виде прямоточной многоступенчатой гидротурбины, работающей на воде, наконечник-сопло гидроподъемного трубопровода и барабан для наматывания и сматывания гибкого трубопровода (патент РФ № 2112139, Е 21 С, 50/00, Б.И. № 15, 1998 г.) - ПРОТОТИП.
Недостатком известной установки является отсутствие кинематической связи между гидравлической турбиной с мягкой механической характеристикой и приводом гусеничного хода с жесткой механической характеристикой, с чем связана неустойчивость работы привода машины, что может привести к поломке оборудования (в частности, поломке исполнительного органа машины).
Задачей изобретения является создание устойчивой работы самоходной тележки за счет обеспечения одинаковой жесткости характеристик привода гусеничного хода и гидравлической турбины.
Поставленная задача решается тем, что самоходная тележка для сбора конкреций в условиях дна Мирового океана, содержащая исполнительный орган в виде барабана-рыхлителя с резцами и встроенным в него приводом в виде многоступенчатой прямоточной гидротурбины, наконечник-сопло гидроподъемного трубопровода и гусеницы хода, согласно изобретению она снабжена установленным на гусеницах хода дополнительным приводом с электрическим кабелем, выполненным в виде асинхронного электродвигателя в водозащищенном исполнении, жестко соединенным с регулируемым маслонасосом с пружинным датчиком давления, делителя расхода на выходе из маслонасоса, золотников реверсирования хода и поворота гусениц хода, причем золотник реверсирования хода связан с объемными гидромоторами через делитель расхода и золотник левого и правого поворота гусениц хода.
Маслонасос привода имеет характеристику с прямо пропорциональной зависимостью давления от расхода рабочей жидкости.
Изобретение поясняется чертежами, где на фиг.1 показан общий вид установки с самоходной тележкой и подводным модулем, на фиг.2 - самоходная тележка, на фиг.3 - вид сверху самоходной тележки, на фиг.4 - подводный модуль, на фиг.5 - схема привода самоходной тележки, на фиг.6 - характеристика маслонасоса с пружинным датчиком давления.
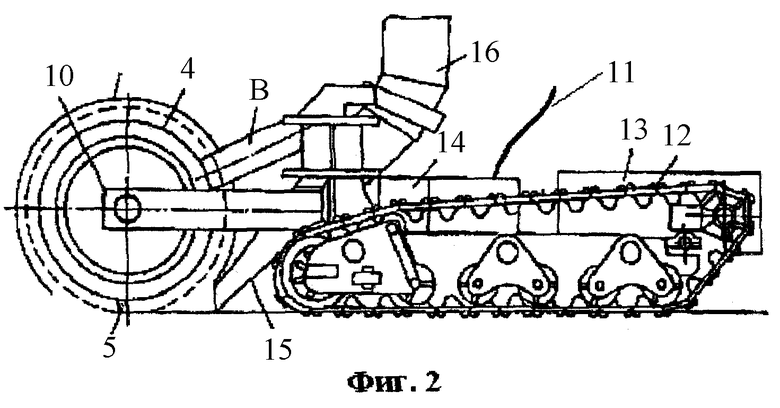
Установка для сбора конкреций, илов и россыпей включает (фиг.1) плавсредство 1, подводный модуль 2 и самоходную тележку 3.
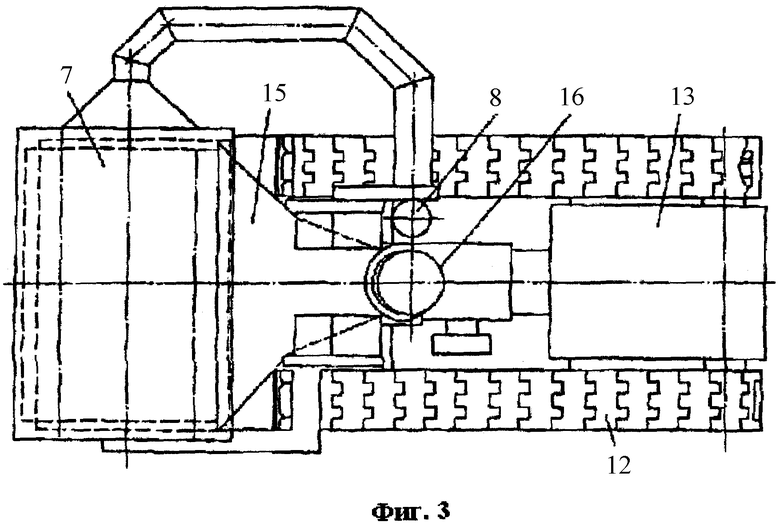
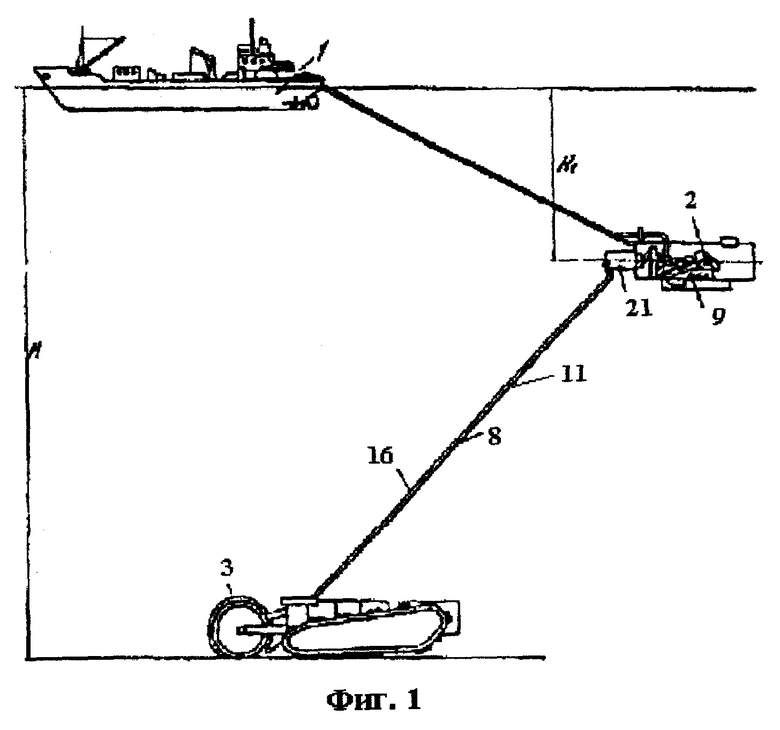
Самоходная тележка 3 (фиг.2 и 3) содержит исполнительный орган в виде барабана-рыхлителя 4 с резцами 5 на его поверхности и защитным кожухом 6. Приводом барабана-рыхлителя 4 является встроенная в него многоступенчатая прямоточная гидротурбина 7, для питания которой через гибкий трубопровод 8 насосом 9, установленным на подводном модуле 2, подается вода. Барабан-рыхлитель 4 подвешен на кронштейне 10, закрепленном на самоходной тележке 3, к которой подведен электрический кабель 11. На самоходной тележке 3 также расположены гусеницы хода 12, дополнительный привод 13, система дистанционного управления 14. Кроме того, на тележке закреплен наконечник-сопло 15 гидроподъемного трубопровода 16 с обратным клапаном и запорным устройством (не показаны).
Подводный модуль 2 (фиг.4) содержит устройства: обезвоживающее 17, аккумулирующее 18, дозирующее 19, транспортирующие: землесос 20, а также барабан 21 для наматывания и сматывания гибкого трубопровода 8 и электрического кабеля 11, конвейер 22.
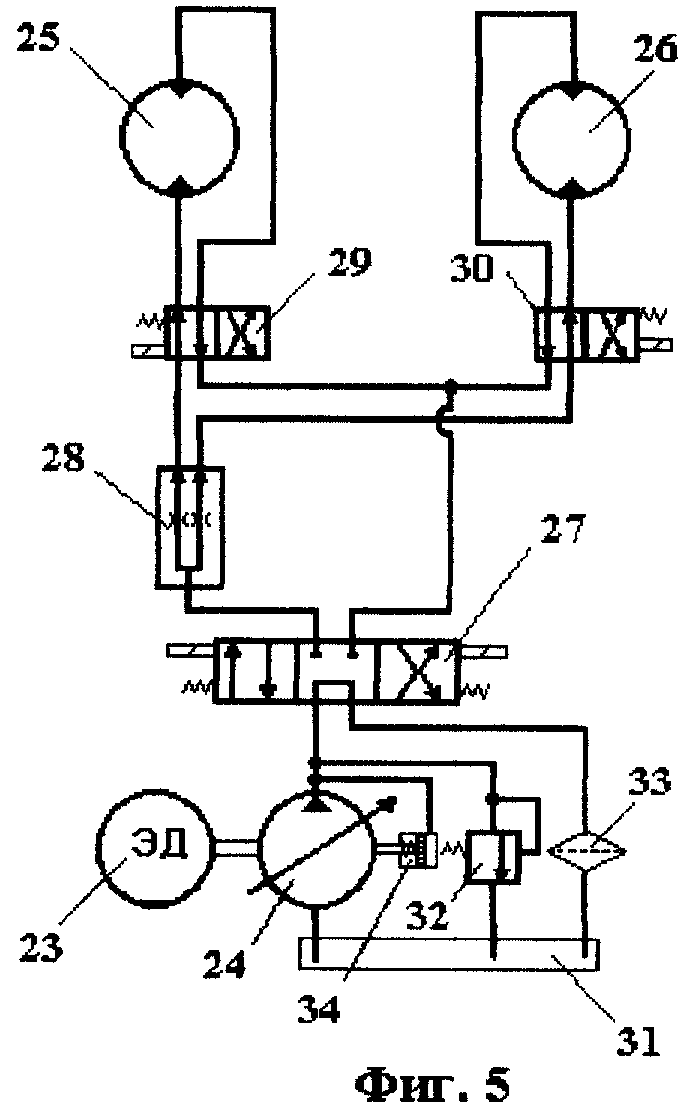
Дополнительный привод 13 самоходной тележки 3 (фиг.5) состоит из асинхронного двигателя 23 в водозащищенном исполнении жестко соединенным с регулируемым маслонасосом 24. Маслонасос 24 обеспечивает питание гидромотора 25 правой и гидромотора 26 левой гусениц. Реверсирование хода самоходной тележки обеспечивается трехпозиционным золотником 27. Равный расход рабочей жидкости обеспечивает делитель расхода 28. Поворот гусениц хода вправо и влево обеспечивается двухпозиционными золотниками 29 и 30. Маслосистема привода снабжена оборудованием, к которому относится герметичный маслобак 31, предохранительный клапан 32, фильтр 33 и пружинный датчик давления 34.
Маслонасос привода имеет прямо пропорциональную зависимость давления от расхода (фиг.6), благодаря чему созданы условия устойчивой работы установки за счет обеспечения одинаковой жесткости характеристик привода гусеничного хода и гидравлической турбины.
Установка работает следующим образом.
После спуска самоходной тележки 3 с подводного модуля 2 на дно, где на поверхности находятся россыпи, илы и конкреции руд, включается насос 9, который из аккумулирующего устройства 18 (зумпфа) по гибкому трубопроводу 8 подает воду под напором на многоступенчатую прямоточную турбину 7 барабана-рыхлителя 4, который, вращаясь, рыхлит илы и россыпи дна, выбрасывая разрыхленную массу к наконечнику-соплу 15. Гусеницы хода 12 самоходной тележки 3 перемещают по дну барабан-рыхлитель 4 и наконечник-сопло 15. Открывается запорное устройство (задвижка) на гидроподъемном трубопроводе 16 и гидросмесь всасывается в наконечник - сопло 15 и далее по трубопроводу 16 за счет разности давлений в подводном модуле 2 из гидросмеси выделяются крупные фракции (конкреции) на обезвоживающем устройстве 17, дозируются в дозирующем устройстве 19 и транспортируются конвейером 22 до места накопления. Остальная жидкая фаза аккумулируется в аккумулирующем устройстве 18 (зумпфе) и ее часть - осветленная вода направляется в насос 9. Конкреции остаются в подводном модуле 2, а илы с остатками воды перекачиваются землесосом 20 на плавсредство 1.
Управление движением самоходной тележки 3 производится с плавсредства 1 через систему дистанционного управления 14, при этом, если самоходная тележка удаляется от подводного модуля 2, то гибкий трубопровод 8, гидроподъемный трубопровод 16 и электрический кабель 11 удлиняются, сматываясь с барабана 21, если же самоходная тележка 3 приближается к модулю, то гибкий трубопровод 8, гидроподъемный трубопровод 16 и электрический кабель 11 укорачиваются, наматываясь на барабан 21.
После обработки заданной площади поверхности дна насос 9 и привод 13 самоходной тележки выключается, закрывается запорное устройство на гидроподъемном трубопроводе 16 и самоходная тележка 3 вместе с барабаном-рыхлителем 4 поднимается к подводному модулю 2, который меняет свое нахождение с помощью плавсредства 1. Затем цикл повторяется до тех пор, пока количество полезных ископаемых в плавсредстве 1 или подводном модуле 2 не достигнет заданного. Тогда все поднимают на плавсредство или буксируют к месту разгрузки.
Асинхронный двигатель 23 в водозащищенном исполнении, подключенный к электросети подводного модуля, запускается.
Регулируемый маслонасос 24 с пружинным датчиком давления 34 подает рабочую жидкость в нагнетательную линию. При среднем положении трехпозиционного золотника 27 поток сбрасывается в герметичный маслобак 31, пройдя через фильтр 33. При этом самоходная тележка 3 неподвижна. При перебрасывании золотника 27 в левое положение поток от насоса подается на делитель расхода 28. От делителя расхода 28 поток приходит к двухпозиционным золотникам 29 и 30. В зависимости от положения этих золотников определяется направление вращения гидромоторов 25 и 26. Они могут вращаться в одном направлении, например по часовой стрелке, золотники 29 и 30 находятся в левом положении, самоходная тележка движется вперед. При переключении золотника 29 в правое положение самоходная тележка начинает поворачиваться влево. При переключении двухпозиционного золотника 30 в правое положение, а двухпозиционного золотника 29 - в левое положение самоходная тележка будет поворачиваться вправо.
Движение самоходной тележки назад будет осуществляться после перебрасывания трехпозиционного золотника 27 в правое положение. При этом двухпозиционные золотники 29 и 30 должны находиться в левом положении. Повороты тележки при движении назад осуществляются аналогичным перебрасыванием двухпозиционных золотников 29 и 30.
При изменении режима работы добычной машины, связанного, например, с увеличением крепости разрушаемого массива, скорость вращения барабана-рыхлителя 4 исполнительного органа уменьшается, при этом нагрузка на гидромоторах 25, 26 гусениц хода 12 возрастает, что приводит к уменьшению скорости их вращения (подачи самоходной тележки на массив) и росту давления в гидросистеме. В связи с этим нагрузка на барабане исполнительного органа снижается, а скорость его вращения восстанавливается. Рост давления в гидросистеме подачи вызывает смещение подпружиненного поршня маслонасоса 24, сжатию пружины и уменьшению подачи рабочей жидкости маслонасоса 24 за счет изменения его рабочего объема.
Таким образом, созданы условия устойчивой работы установки за счет обеспечения одинаковой жесткости характеристик привода гусеничного хода и гидравлической турбины.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ СБОРА ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ПОВЕРХНОСТИ МОРСКОГО ДНА | 1999 |
|
RU2165021C1 |
| УСТАНОВКА С САМОХОДНОЙ ТЕЛЕЖКОЙ ДЛЯ СБОРА КОНКРЕЦИЙ В УСЛОВИЯХ ДНА МИРОВОГО ОКЕАНА | 1996 |
|
RU2112139C1 |
| САМОХОДНАЯ ТЕЛЕЖКА ДЛЯ СБОРА КОНКРЕЦИЙ В УСЛОВИЯХ ДНА МИРОВОГО ОКЕАНА | 1999 |
|
RU2150004C1 |
| ПРОМЕЖУТОЧНАЯ КАПСУЛА ДЛЯ ПОДЪЕМА ТВЕРДЫХ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА МИРОВОГО ОКЕАНА | 2022 |
|
RU2779867C1 |
| УСТАНОВКА ДЛЯ ДОБЫЧИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ СО ДНА АКВАТОРИИ | 2001 |
|
RU2203421C1 |
| ПРЯМОТОЧНАЯ МНОГОСТУПЕНЧАТАЯ ГИДРОТУРБИНА | 2007 |
|
RU2352783C1 |
| ГРУНТОЗАБОРНОЕ УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПОДВОДНЫХ РОССЫПЕЙ | 2004 |
|
RU2280165C1 |
| Устройство для разработки конкреций | 2002 |
|
RU2221144C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ КОНКРЕЦИЙ | 2000 |
|
RU2170823C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ КОНКРЕЦИЙ | 2000 |
|
RU2170824C2 |


Изобретение относится к установкам для добычи полезных ископаемых со дна морей и океанов. Самоходная тележка для сбора конкреций в условиях дна Мирового океана, содержащая исполнительный орган в виде барабана-рыхлителя с резцами и встроенный в него привод в виде прямоточной многоступенчатой гидротурбины, наконечник-сопло гидроподъемного трубопровода и гусеничного хода, снабжена установленным на гусеницах хода дополнительным приводом с электрическим кабелем, выполненным в виде асинхронного двигателя в водозащищенном исполнении, жестко соединенным с регулируемым маслонасосом с пружинным датчиком давления, делителя расхода на выходе из маслонасоса, золотников реверсирования хода и поворота гусениц хода. Золотник реверсирования хода связан с объемными гидромоторами через делитель расхода и золотники левого и правого поворота гусениц хода. Маслонасос привода имеет прямо пропорциональную зависимость давления от расхода. Повышается надежность работы, при этом созданы условия устойчивой работы всей установки за счет обеспечения одинаковой жесткости характеристик приводов гусеничного хода и гидротурбины. 1 з.п. ф-лы, 6 ил.
| УСТАНОВКА С САМОХОДНОЙ ТЕЛЕЖКОЙ ДЛЯ СБОРА КОНКРЕЦИЙ В УСЛОВИЯХ ДНА МИРОВОГО ОКЕАНА | 1996 |
|
RU2112139C1 |
| САМОХОДНАЯ ТЕЛЕЖКА ДЛЯ СБОРА КОНКРЕЦИЙ В УСЛОВИЯХ ДНА МИРОВОГО ОКЕАНА | 1999 |
|
RU2150004C1 |
| УСТАНОВКА ДЛЯ СБОРА ПОЛЕЗНЫХ ИСКОПАЕМЫХ С ПОВЕРХНОСТИ МОРСКОГО ДНА | 1999 |
|
RU2165021C1 |
| Устройство для подъема марганцевых конкреций или подобных образований с морского дна | 1985 |
|
SU1602397A3 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "СУП С МОЙВОЙ И КАПУСТОЙ" | 2014 |
|
RU2560281C1 |

