Изобретение относится к области авиации и, в частности, к соплам воздушно-реактивных двигателей.
Наряду с требованиями, предъявляемыми к реактивным соплам по обеспечению регулирования необходимых режимов во всем эксплуатационном диапазоне работы двигателя, предъявляются и другие требования, например управлять вектором тяги как по тангажу, так и по курсу летательного аппарата, обеспечение реверса тяги и т.п.
Известны плоские реактивные сопла (см. патент ФРГ № 3327385, МПК 7F 02 K 9/84, 29.07.83 г.), которые обеспечивают изменение вектора тяги по тангажу и по курсу. Однако изменение вектора тяги в таких соплах осуществляется как за счет изменения положения подвижных створок, так и за счет изменения положения всего корпуса плоского сопла относительно одной из осей двигателя, что требует повышенных усилий, которые должны развивать силовые гидроцилиндры, вследствие чего известные конструкции имеют большой вес и габариты.
Задачей изобретения является обеспечение регулирования режимов двигателя во всем эксплутационном диапазоне, а также изменение вектора тяги по тангажу и по курсу и обеспечение реверса тяги.
Технический результат достигается тем, что выходное двухмерное сопло для воздушно-реактивного двигателя, содержащее корпус с двумя боковыми и верхней и нижней стенками, плоские подвижные дозвуковые и сверхзвуковые створки, шарнирно связанные с корпусом и между собой, шарнирно-рычажные системы, соединенные со створками и приводами, системы управления режимами изменения вектора тяги и реверса тяги двигателя, при этом плоские подвижные дозвуковые и сверхзвуковые створки размещены внутри корпуса сопла вдоль боковых стенок, на боковых стенках корпуса выполнено по одному сквозному окну на каждой стенке, закрываемому плоскими панелями, передняя сторона которых шарнирно закреплена на передней стороне сквозного окна, а задняя сторона каждой панели контактирует с задней стороной окна с возможностью открытия только внутрь корпуса сопла, каждая панель со стороны заднего конца шарнирно через демпфирующую телескопическую тягу связана с соответствующей ей подвижной сверхзвуковой створкой, при этом шарнирно-рычажная система управления каждой сверхзвуковой створкой состоит из пар тандемно соединенных пневмоцилиндра и гидроцилиндра, при этом каждый пневмоцилиндр жестко закреплен на корпусе сопла, а его шток шарнирно соединен с корпусом гидроцилиндра и снабжен управляемым от системы изменения вектора тяги тормозом с возможностью его фиксации вдоль оси сопла, а поршень гидроцилиндра в середине своего рабочего хода имеет возможность фиксации управляемым от системы изменения вектора тяги, например, гидравлическим упором, гидроцилиндр закреплен на корпусе сопла с возможностью перемещения вдоль продольной оси сопла, шток гидроцилиндра заканчивается подвижным роликом, связанным шарнирно тягой со сверхзвуковой створкой и размещенным в направляющих параллельных продольной оси сопла, закрепленных с помощью неподвижных тяг на его корпусе, при установке на летательный аппарат двигателей парами на каждом двигателе каждый гидроцилиндр, ближайший к сверхзвуковой створке, имеет механические упоры, расположенные в левом и правом крайних положениях от его среднего положения рабочего хода поршня и дополнительно связан с задатчиком максимального отклонения сверхзвуковых створок системы управления изменения вектора тяги в противоположные стороны на каждом двигателе пары, причем на верхней и нижней стенках сопла также выполнено по одному сквозному окну, каждое из которых закрыто составной створкой, состоящей из двух расположенных друг над другом наружной и внутренней половин, задние концы которых связаны общим шарниром, закрепленным на задней стороне окна, в проеме каждого окна между передней его стороной и общим шарниром установлены направляющие, в которых размещены подвижные ролики, соединенные с одной стороны с помощью тяг и шарниров с верхней и нижней половинами составных створок, а с другой стороны с приводом для их поворота относительно общего шарнира - наружных половин наружу сопла, внутренних половин - внутрь сопла до контакта своими свободными сторонами, кроме того, на верхней и нижней стенках корпуса между общим шарниром и срезом корпуса сопла установлены направляющие, в которых расположены подвижные секции панелей на всю ширину этих стенок, соединенные между собой шарнирами и со стенками корпуса - посредством подвижных роликов с возможностью перемещения секций за срез сопла, на каждой задней концевой секции выполнены проушины, при этом каждая проушина шарнирно соединена с рычагом, размещенным внутри соответствующей боковой стенки корпуса, вторые концы рычагов от проушин верхней и нижней концевых секций шарнирно соединены на общей втулке, которая неподвижно закреплена внутри каждой боковой стенки на уровне продольной оси корпуса сопла, кроме того, каждый рычаг в своей средней части шарнирно соединен с приводом для его поворота относительно общей втулки.
Сущность изобретения поясняется чертежами.
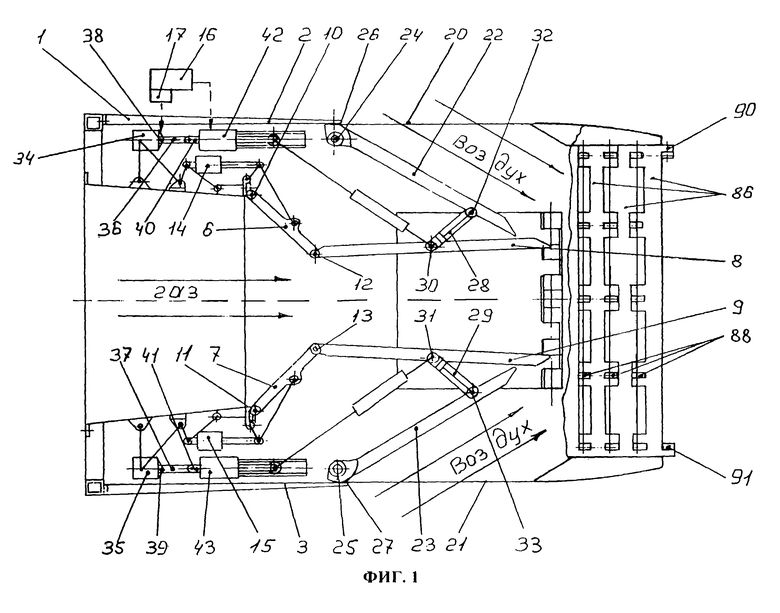
На фиг.1 представлен разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок с минимальной площадью проходного сечения сопла.
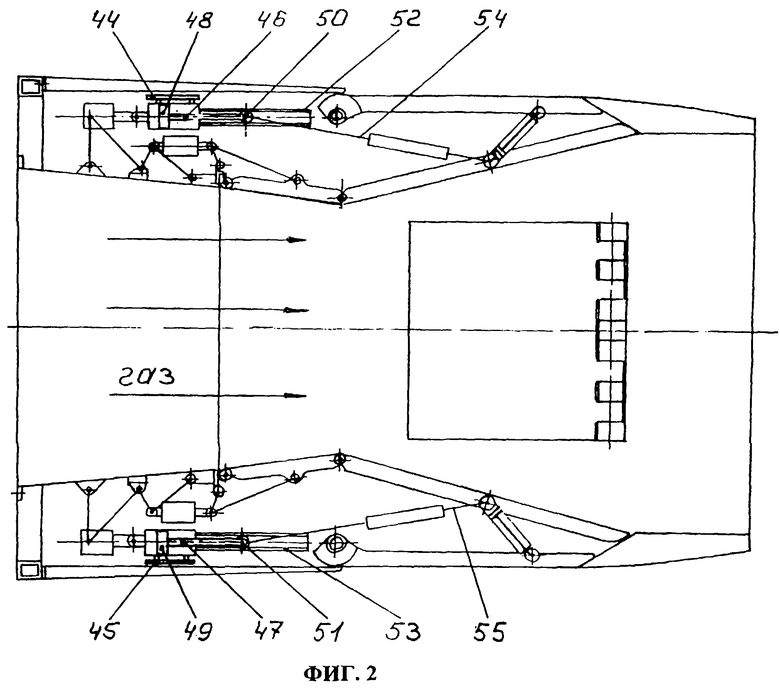
На фиг.2 представлен разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок с максимальной площадью проходного сечения сопла.
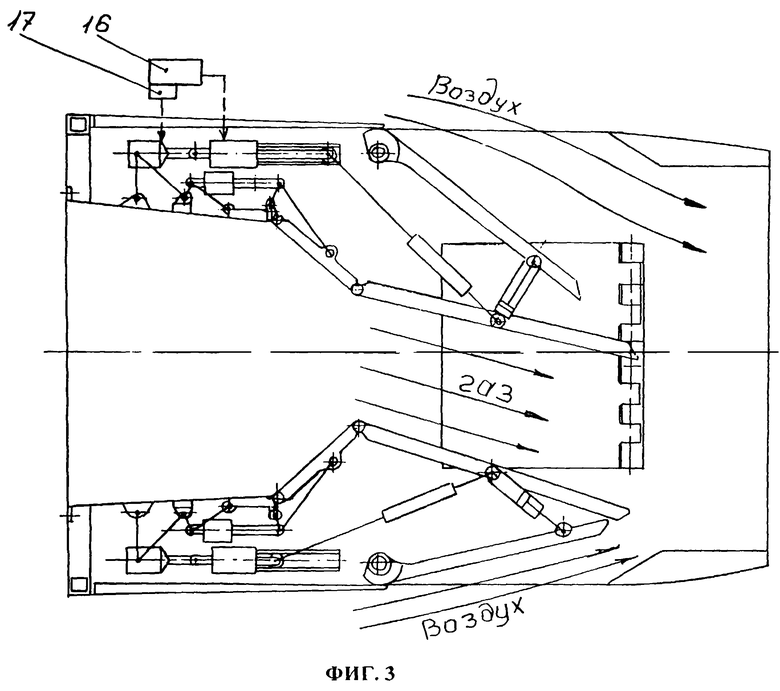
На фиг.3 представлен разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок при изменении вектора тяги по курсу (влево).
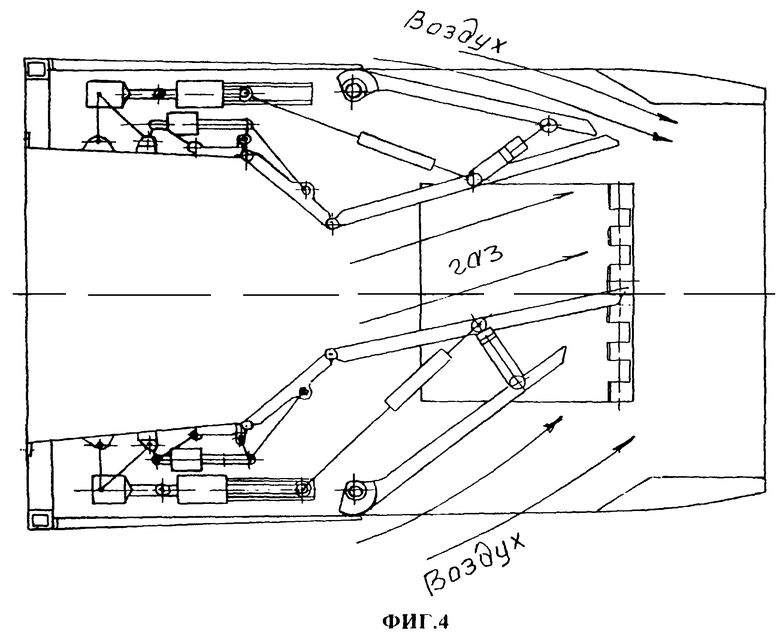
На фиг.4 представлен разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок при изменении вектора тяги по курсу (вправо).
На фиг.5 представлен разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок при открытии в верхней и нижней стенках корпуса сопла сквозных окон и повороте составных створок в положение реверса тяги.
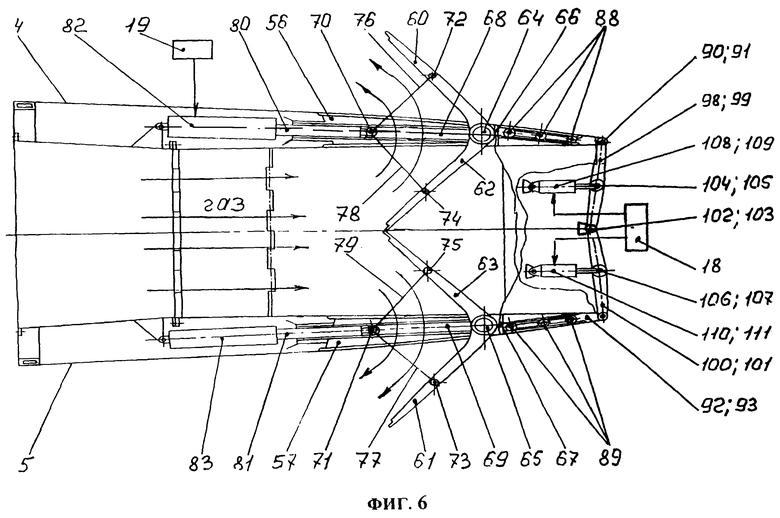
На фиг.6 представлен продольный разрез плоского сопла (вид сбоку) с необходимыми вырезами при открытии в верхней и нижней стенках корпуса сопла сквозных окон и повороте составных створок в положение реверса тяги.
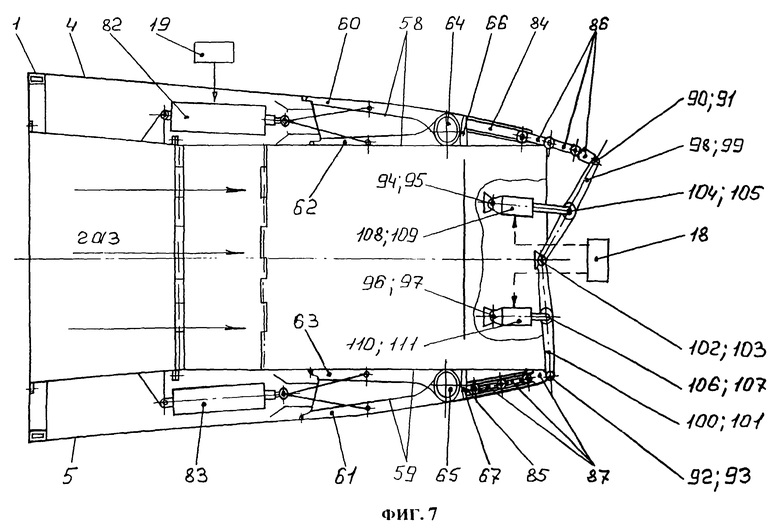
На фиг.7 представлен продольный разрез плоского сопла (вид сбоку) при положении выдвинутых за срез сопла верхних подвижных секций панелей и отклоненных к продольной оси двигателя вниз при изменении вектора по тангажу вниз.
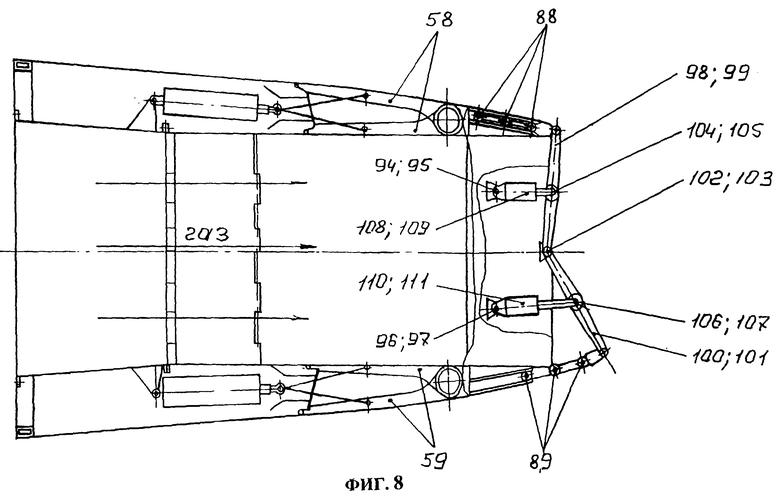
На фиг.8 представлен продольный разрез плоского сопла (вид сбоку) при положении выдвинутых за срез сопла нижних подвижных секций панелей и отклоненных к продольной оси двигателя вверх при изменении вектора по тангажу вверх.
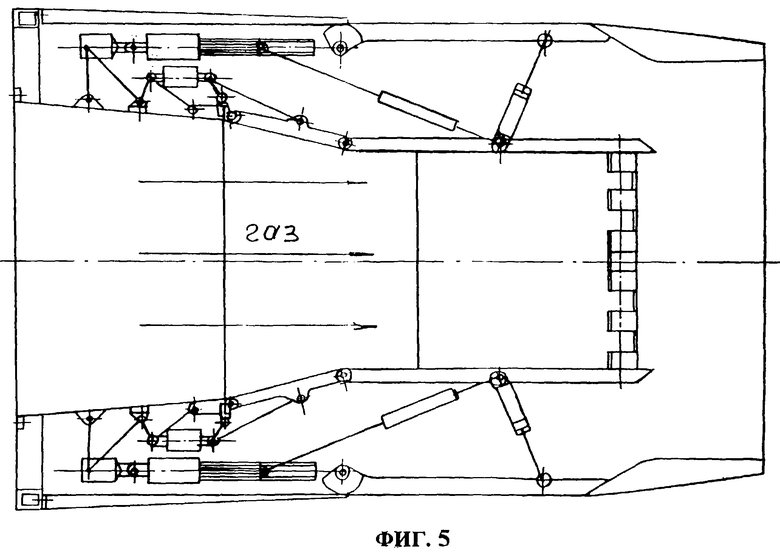
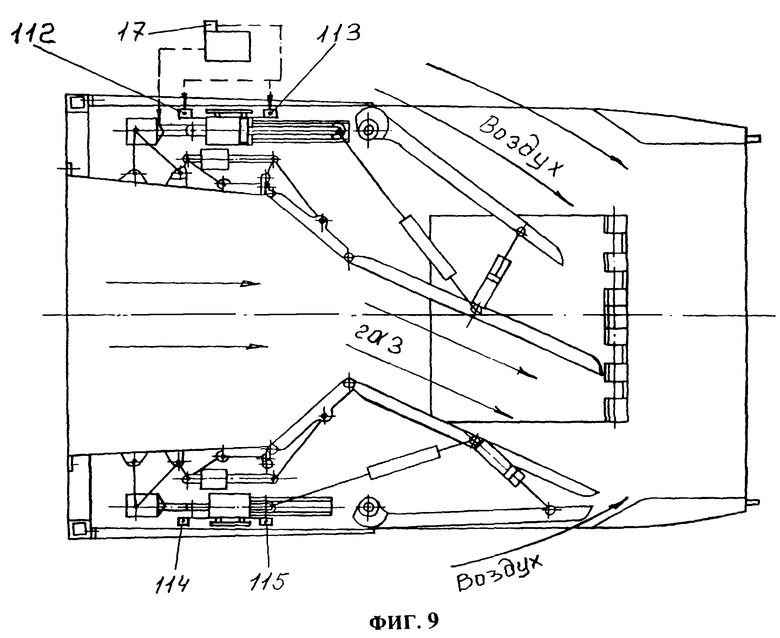
На фиг.9 представлен продольный разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок при максимальном отклонении сверхзвуковых створок влево для уменьшения ИК-заметности в задней полусфере левого двигателя (по полету) при установке на летательный аппарат двигателей парами.
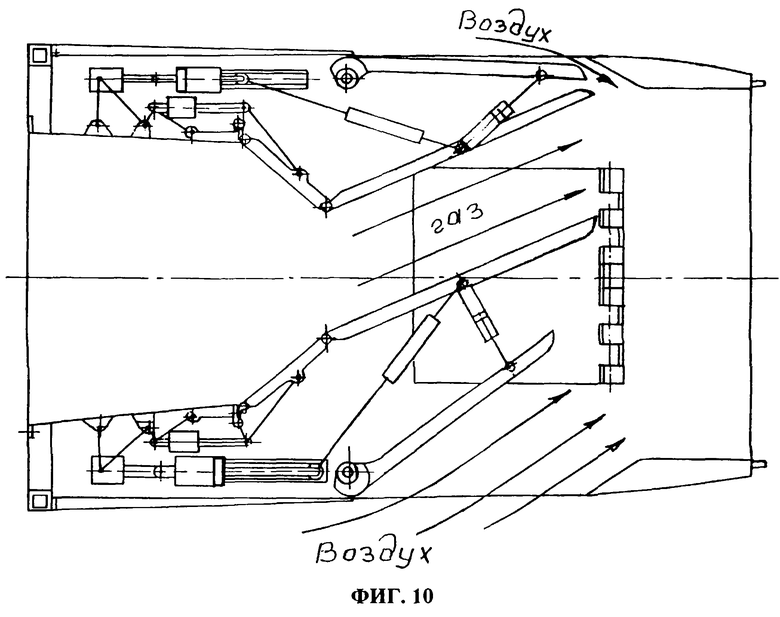
На фиг.10 представлен продольный разрез плоского сопла (вид сверху) при положении дозвуковых и сверхзвуковых створок при максимальном отклонении сверхзвуковых створок вправо для уменьшения ИК-заметности в задней полусфере правого двигателя (по полету) при установке на летательный аппарат двигателей парами.
Выходное двухмерное сопло для воздушно-реактивного двигателя содержит корпус 1 с двумя боковыми 2, 3 и верхней 4 и нижней 5 стенками, плоские подвижные дозвуковые 6, 7 и сверхзвуковые 8, 9 створки, соединенные с корпусом шарнирами 10, 11 и между собой шарнирами 12, 13, шарнирно-рычажные системы с гидроцилиндрами 14, 15, системы изменения вектора тяги по курсу 16 с задатчиком максимального отклонения сверхзвуковых створок 17, тангажу 18 и системы изменения реверса тяги 19, по одному сквозному окну 20 и 21 на каждой боковой стенке, закрываемых плоскими панелями 22, 23, закрепленными шарнирами 24, 25 на передних сторонах 26, 27 окон, демпфирующие телескопические тяги 28, 29 с шарнирами 30, 31, 32, 33, пневмоцилиндры или гидроцилиндры 34, 35, штоки 36, 37 с тормозами 38, 39, которые через шарниры 40, 41 соединены с корпусами гидроцилиндров 42, 43 с гидравлическими упорами 44, 45, штоки 46, 47 поршней 48, 49 снабжены роликами 50, 51, подвижными по направляющим 52, 53, и соединенные шарнирно тягами 54, 55; сквозные окна 56, 57 в верхней и нижней стенках корпуса со створками 58, 59, состоящими из наружных 60, 61 и внутренних 62, 63 половин с общими шарнирами 64, 65, закрепленными на задних сторонах 66, 67 окон, и направляющими 68, 69 с подвижными роликами 70, 71, соединенными с помощью шарниров 72, 73, 74, 75 и тяг 76, 77, 78, 79 со створками и штоками 80 и 81 гидроцилиндров 82, 83 для их привода, кроме того, верхняя и нижняя стенки корпуса содержат направляющие 84, 85 с подвижными секциями панелей 86, 87, соединенными между собой шарнирами 88, 89, проушины 90, 91, 92, 93, шарниры 94, 95, 96, 97, рычаги 98, 99, 100, 101, втулки 102, 103, шарниры 104, 105, 106, 107, приводы (гидроцилиндры) 108, 109, 110, 111, механические упоры 112, 113, 114,115 на гидроцилиндрах в левом и правом крайних положениях рабочего хода поршня.
Выходное двухмерное сопло для воздушно-реактивного двигателя работает следующим образом.
При работе двигателя на бесфорсажных или форсажных режимах в гидроцилиндры 14, 15, 34, 35, 42 и 43 шарнирно рычажных систем подаются соответствующие гидродавления и пневмодавления из системы автоматического управления режимами двигателя (на схемах условно не показано). Для обеспечения минимальной критической площади проходного сечения сопла или какого-либо ее промежуточного значения между максимальной и минимальной величинами в гидроцилиндрах 14, 15, 34,35 поршни перемещаются в правое крайнее положение, при этом штоки гидроцилиндров 14 и 15 через воздействие на шарнирно-рычажную систему поворачивают относительно шарниров 10 и 11 плоские дозвуковые створки 6 и 7 в сторону уменьшения площади проходного сечения и одновременно через шарниры 12 и 13 воздействуют на плоские сверхзвуковые створки 8 и 9. Одновременно штоки 36, 37 пневмоцилиндров или гидроцилиндров 34, 35 через шарниры 40, 41 воздействуют на корпуса гидроцилиндров 42 и 43. При этом одновременно из системы управления 16 в гидроцилиндры 42, 43 поступает сигнал, по которому гидравлическими упорами 44, 45 поршни 48, 49 в середине своего рабочего хода фиксируются от перемещения.
Гидроцилиндры 42, 43 вместе с поршнями 48, 49 и штоками 46, 47 в этом случае работают как обычные жесткие тяги и воздействуют на ролики 50, 51, которые перемещаются по направляющим 52, 53 и воздействуют через тяги 54, 55 и шарниры 30, 31 на сверхзвуковые створки 8, 9 и перемещают их в сторону уменьшения площади проходного сечения сопла. Одновременно створки 8, 9 через шарниры 30, 31, демпфирующие телескопические тяги 28, 29, шарниры 32, 33 воздействуют на плоские панели 22, 23 и поворачивают их во внутреннею полость сопла относительно шарниров 24, 25, закрепленных неподвижно на передних сторонах 26, 27 сквозных окон 20 и 21, открывают их и соединяют внутреннею полость сопла с окружающей атмосферой. Через полностью или частично открытые окна 20, 21 происходит поступление эжектируемого воздуха, который увеличивает давление в образовавшемся донном уступе сопла и одновременно уменьшает потери тяги на режимах работы двигателя с минимальной площадью проходного сечения сопла или какого-либо ее промежуточного значения между максимальной и минимальной величиной.
Для обеспечения максимальной площади раскрытия створок на форсажных режимах в гидроцилиндрах 14, 15, 34, 35 поршни перемещаются в левое крайнее положение, при этом штоки гидроцилиндров 14, 15 через воздействие на шарнирно-рычажную систему поворачивают относительно шарниров 10, 11 плоские дозвуковые створки 6, 7 в сторону увеличения площади проходного сечения и одновременно через шарниры 12, 13 воздействуют на плоские сверхзвуковые створки 8, 9. Одновременно штоки 36, 37 пневмоцилиндров или гидроцилиндров 34, 35 через шарниры 40, 41 воздействуют на корпуса гидроцилиндров 42, 43. При этом одновременно из системы управления 16 в гидроцилиндры 42, 43 поступает сигнал, по которому гидравлическими упорами 44, 45 поршни 48, 49 в середине своего рабочего хода фиксируются от перемещения и гидроцилиндры 42, 43 вместе с поршнями 48, 49 и штоками 46, 47 в этом случае работают как обычные жесткие тяги и воздействуют на ролики 50, 51, которые перемещаются влево по направляющим 52 и 53 и воздействуют через тяги 54 и 55 и шарниры 31 и 32 на сверхзвуковые створки 8 и 9 и перемещают их в сторону увеличения площади проходного сечения сопла. Одновременно створки 8 и 9 через шарниры 30 и 31, демпфирующие телескопические тяги 28 и 29, шарниры 32 и 33 воздействуют на плоские панели 22 и 23 и поворачивают их наружу относительно шарниров 24 и 25, закрепленных неподвижно на передней стороне 26 и 27 сквозных окон 20 и 21, до контакта с задней стороной окон 20 и 21, закрывают их, формируют сверхзвуковую часть проходного сечения сопла и обеспечивают работу двигателя на форсажных режимах.
При изменении вектора тяги по курсу, из системы изменения вектора тяги 16 поступают управляющие сигналы в механические тормоза 38 и 39, штоки 36 и 37 пневмоцилиндров или гидроцилиндров 34 и 35 фиксируется от перемещения вдоль оси сопла и становятся как жесткие упоры. Одновременно в гидроцилиндры 42 и 43 также из системы изменения вектора тяги 16 поступают управляющие сигналы, по которым поршни 48 и 49 снимаются с гидравлических упоров 44 и 45 и могут перемещаться вдоль продольной оси двигателя от своего среднего положения рабочего хода. При поступлении сигнала на изменение вектора тяги по курсу влево поршень 48 гидроцилиндра 42 перемещается от своего среднего положения вправо, поршень 49 гидроцилиндра 43 соответственно в другую сторону - влево от своего среднего положения. При таком движении поршней шток 46 поршня 42 воздействуют на ролики 50, которые перемещаются вправо по направляющим 52 и воздействуют через тяги 54 и шарниры 30 на сверхзвуковую створку 8, которая отклоняется к продольной оси и отклоняет одновременно через шарниры 30 и 32, тягу 28 плоскую панель 22, открывая при этом сквозное окно 20, а шток 47 поршня 43 воздействует на ролики 51, которые перемещаются влево по направляющим 53 и воздействуют через тяги 55 и шарниры 31 на сверхзвуковую створку 9, которая отклоняется от продольной оси и отклоняет одновременно через шарниры 31 и 33, тягу 28 плоскую панель 23, открывая при этом сквозное окно 21. При поступлении сигнала на изменение изменении вектора тяги по курсу вправо поршень 48 гидроцилиндра 42 перемещается от своего среднего положения влево, поршень 49 гидроцилиндра 43 соответственно в другую сторону - вправо от своего среднего положения. При таком движении поршней шток 46 поршня 42 воздействуют на ролики 50, которые перемещаются влево по направляющим 52 и воздействуют через тягу 54 и шарнир 30 на сверхзвуковую створку 8, которая отклоняется от продольной оси и отклоняет одновременно через шарниры 30 и 31, тягу 28 плоскую панель 22, открывая при этом сквозное окно 20, а шток 47 поршня 49 воздействует на ролики 51, которые перемещаются вправо по направляющим 53 и воздействуют через тягу 55 и шарниры 31 на сверхзвуковую створку 9, которая отклоняется к продольной оси и отклоняет одновременно через шарниры 31 и 33, тягу 28 плоскую панель 23, открывая при этом сквозное окно 21. При этом величина отклонения створок при изменении вектора тяги по курсу в ту или другую сторону определяется расчетным или экспериментальным путем и для каждого конкретного случая угол отклонения створок устанавливается по величине управляющего сигнала, поступающего из системы изменения вектора тяги 16, но не более чем на ту величину, которая определяется при движении от своего среднего положения поршней 48 и 49 гидроцилиндров 42 и 43 до механических упоров 112, 113, 114, 115.
Для уменьшения ИК-заметности в задней полусфере двигателя (при установке на летательный аппарат двигателей парами) в первоначальной стадии осуществляются те же действия как и при отклонении створок при изменении реверса тяги по курсу. Далее отклонение сверхзвуковых створок на максимально возможный угол производится при поступления сигналов системы изменения вектора тяги 16 в тормоза 38 и 39, пневмоцилиндры или гидроцилиндры 34 и 35, в гидроцилиндры 42 и 43 и от задатчика максимального отклонения створок 17 на механические упоры 112, 113, 114, 115. Под действием этих управляющих сигналов механические упоры 112, 113, 114, 115 прекращают ограничивать ход движения поршней 48 и 49, и поршни 48 и 49 продолжают свое движение и воздействуют, как при изменении вектора тяги по курсу, на сверхзвуковые створки 8 и 9, которые под этим воздействием отклоняются на максимально возможные углы в противоположные стороны на каждом двигателе пары и закрывают своими панелями более горячие части двигателя.
Для обеспечения реверса тяги двигателя в гидроцилиндры 14, 15, 34, 35, 42 и 43 шарнирно рычажных систем подаются соответствующие сигналы из системы управления режимами двигателя (на схемах условно не показано) и из системы изменения реверса тяги 19 в гидроцилиндры 82 и 83. При этом для обеспечения реверса дозвуковые и сверхзвуковые створки 6, 7 и 8, 9 по специальным сигналам из системы управления режимами двигателя занимают специальное промежуточное положение между минимальной и максимальной площадью проходного сечения сопла. Для этого в гидроцилиндрах 14, 15, 34, 35 поршни перемещаются в промежуточное положение, штоки гидроцилиндров 14 и 15 через воздействие на шарнирно-рычажную систему поворачивают относительно шарниров 10 и 11 плоские дозвуковые створки 6 и 7 и занимают промежуточное положение и одновременно через шарниры 12 и 13 воздействуют на плоские сверхзвуковые створки 8 и 9. Одновременно штоки 36 и 37 пневмоцилиндров или гидроцилиндров 34 и 35 через шарниры 40 и 41 воздействуют на корпуса гидроцилиндров 42 и 43. При этом одновременно из системы управления изменением вектора тяги 16 в гидроцилиндры 42 и 43 поступает сигнал, по которому гидравлическими упорами 44 и 45 поршни 48 и 49 в середине своего рабочего хода фиксируются от перемещения, и гидроцилиндры 42 и 43 вместе с поршнями 48 и 49 и штоками 46 и 47 в этом случае работают как обычные жесткие тяги и воздействуют на ролики 50 и 51, которые перемещаются по направляющим 52 и 53 и в свою очередь воздействуют через тяги 54, 55 и шарниры 30 и 31 на сверхзвуковые створки 8 и 9, которые тоже занимают специальное для реверсирования тяги промежуточное положение. Одновременно створки 8 и 9 через шарниры 30 и 31, демпфирующие телескопические тяги 28, 29, шарниры 32, 33 воздействуют на плоские панели 22, 23 и поворачивают их относительно шарниров 24, 25, закрепленных неподвижно на передней стороне 26, 27 сквозных окон 20, 21, до контакта с задней стороной окон и закрывают их. Одновременно поршни гидроцилиндров 82, 83 перемещают свои штоки 80, 81, связанные с подвижными роликами 70, 71, по направляющим 68, 69 вправо. Ролики другой своей стороной соединены тягами 79, 81 и 80, 82 и шарнирами 76, 77, 78, 79 с наружными 60, 61 и внутренними 62, 63 половинами составных створок, задние концы которых соединены с общими шарнирами 64, 65, закрепленными на задних сторонах 67, 68 сквозных окон 56, 57 и при своем движении вправо поворачивают относительно общих шарниров 64, 65 наружные половины 60, 61 наружу, а внутренние половины 62, 63 - внутрь сопла до контакта своими свободными сторонами, открывая при этом сквозные окна 56, 57 и перекрывая при этом с помощью внутренних половин 62, 63, и одновременно дозвуковыми 6, 7 и сверхзвуковыми створками 8, 9, занимающими определенное специальное положение для реверса, все проходное сечение сопла. В этом положении поток выходящих газов из двигателя поворачивается и направляется наружу через сквозные окна 56 и 57 против движения самолета и обеспечивает его торможение и пробег по взлетно-посадочной полосе аэродрома при посадке.
Изменение вектора тяги по тангажу производится по поступлению управляющих сигналов из системы управления 18 в гидроцилиндры 108, 109, 110, 111.
При изменении вектора тяги по тангажу вниз управляющие сигналы поступают в верхние гидроцилиндры 108,109, шарнирно 94, 95 закрепленные на боковых стенках 2 и 3 корпуса 1 сопла, поршни гидроцилиндров начинают перемещаться вправо и через свои штоки, шарниры 104, 105 и рычаги 98, 99, одна сторона которых соединена с проушинами 90, 91, а другая - с втулками 102, 103, закрепленными на боковых стенках 2 и 3 на уровне продольной оси корпуса сопла, отклоняют рычаги 98, 99 относительно втулок 102, 103 вправо и за проушины 90, 91 выдвигают по направляющим 84, соединенные шарнирами 88 подвижные секции панелей 86 за срез сопла, отклоняя их к продольной оси сопла за счет кинематической связи, что приводит к появлению вертикальной составляющей вектора тяги вверх и изменению по тангажу самолета вниз. При изменении вектора тяги по тангажу вверх управляющие сигналы поступают в нижние гидроцилиндры 110, 111, закрепленные на боковых стенках корпуса сопла при помощи шарниров 96, 97. Поршни гидроцилиндров начинают перемещаться вправо и через свои штоки и шарниры 106,107 и рычаги 100, 101, один из которых соединен с проушинами 92, 93, а другой - с втулками 102, 103, закрепленными на боковых стенках на уровне продольной оси корпуса сопла, отклоняют рычаги 106, 107 относительно втулок 102, 103 вправо и за проушины 90, 91 выдвигают по направляющим 85, соединенным шарнирами 89 подвижные секции панелей 87 за срез сопла, отклоняя их к продольной оси сопла за счет кинематической связи, что приводит к появлению вертикальной составляющей вектора тяги вниз и изменению по тангажу самолета вверх.
Уборка подвижных панелей 86, 87 в корпус сопла осуществляется подачей управляющих сигналов из системы управления 18 в гидроцилиндры 108, 109, 110, 111 на уборку подвижных панелей 86 или 87, при этом поршни гидроцилиндров 108, 109 или 110, 111 перемещаются влево, рычаги 98, 99 или 100, 101 тоже передвинутся влево и по направляющим 84 или 85 панели 86 или 87 займут свое место между стенками корпуса сопла, после чего поступление управляющих сигналов из системы управления 18 прекращается.
Такое выполнение двухмерного сопла для воздушно-реактивного двигателя с плоскими подвижными дозвуковыми и сверхзвуковыми створками, размещенными внутри корпуса сопла вдоль боковых стенок, шарнирно связанными с корпусом и между собой приводами и шарнирно-рычажной системой управления, позволяет обеспечить необходимые режимы работы двигателя как на бесфорсажных, так и на форсажных режимах, а наличие сквозных окон на каждой боковой стенке, закрываемых плоскими панелями, передняя сторона которых шарнирно закреплена на передней стороне сквозного окна, а задняя сторона панели контактирует с задней стороной сквозного окна с возможностью открытия только внутрь корпуса сопла, и каждая панель при этом со стороны заднего конца шарнирно через демпфирующую телескопическую систему тягу связана с соответствующей ей подвижной сверхзвуковой створкой, что позволяет при работе на бесфорсажных и частичных форсажных режимах за счет открытия сквозных окон организовать поступление эжектируемого воздуха через окна и тем самым увеличить давление в образовавшемся донном уступе сопла и уменьшить потери тяги двигателя.
Выполнение шарнирно-рычажной системы управления каждой сверхзвуковой створкой из пар тандемно соединенных пневмоцилиндра и гидроцилиндра позволяет при отсутствии управляющего сигнала из системы изменения вектора тяги по курсу фиксировать поршень гидроцилиндра в середине его рабочего хода и заставляет гидроцилиндр работать как обычную подвижную тягу, связывающую пневмоцилиндр с подвижными роликами, перемещающимися по направляющим, со сверхзвуковыми створками, обеспечивая в этом случае получение как бесфорсажных, так и форсажных режимов двигателя, при поступлении управляющего сигнала от системы изменения вектора тяги по курсу позволяет фиксировать шток пневмоцилиндра от продольного перемещения, снимать поршень гидроцилиндра с гидравлического упора и заставляет работать каждый гидроцилиндр как привод подвижных роликов, перемещающихся по направляющим, и, тем самым, обеспечивать поворот сверхзвуковых створок за счет перемещения одновременно поршней от своего среднего положения, с одной стороны в правую сторону, с другой - в левую, и наоборот, в зависимости в какую сторону поступил управляющий сигнал на изменение на заданный угол по курсу направления вектора тяги.
Выполнение в верхней и нижней стенках корпуса сопла по одному сквозному окну, закрытому составными створками из двух расположенных друг над другом верхней и нижней половин при подаче управляющего сигнала в систему привода поворота позволяет обеспечить перемещение подвижных роликов по направляющим и поворот наружных половин наружу корпуса сопла, а внутренних половин - в проточную часть сопла до контакта своими свободными сторонами и, тем самым, обеспечить реверсирование тяги, когда это необходимо с высокой степенью надежности.
Установка на верхней и нижней стенках корпуса сопла между общим шарниром и срезом сопла направляющих, в которых расположены подвижные секции панелей на всю ширину этих стенок, соединенных между собой шарнирами и со стенками корпуса посредством подвижных роликов с возможностью перемещения секций за срез сопла, выполнение по бокам каждой задней концевой секции проушин, при этом соединение каждой проушины шарнирно с рычагом, размещенным внутри соответствующей боковой стенки корпуса, а также соединение вторых концов рычагов от проушин верхней и нижней концевых секций шарнирно на общей втулке, которая неподвижно закреплена внутри боковых стенок на уровне продольной оси корпуса сопла, и шарнирное соединение каждого рычага в своей средней части с приводом для его поворота относительно общей втулки при поступлении в верхний или нижний привод поворота рычага управляющего сигнала на изменение вектора тяги по тангажу позволяет по направляющим выдвинуть за срез сопла подвижные секции панелей и за счет кинематической связи изогнуть их к продольной оси двигателя вниз или вверх в зависимости от поступившего управляющего сигнала и тем самым обеспечить отклонения на заданный угол вектора тяги по тангажу самолета.
Выполнение шарнирно-рычажной системы управления каждой сверхзвуковой створкой из пар тандемно соединенных двух гидроцилиндров, когда поршень основного, ближайшего к сверхзвуковой створке, гидроцилиндра в середине своего рабочего хода снабжен возможностью его фиксации управляемым сигналом из системы изменения вектора тяги по курсу, например, гидравлическим упором, а сам гидроцилиндр закреплен на корпусе сопла с возможностью перемещения вдоль его оси, когда тандемный к нему гидроцилиндр жестко закреплен на корпусе сопла и его шток шарнирно соединен с корпусом основного гидроцилиндра и снабжен управляемым от системы изменения вектора тяги по курсу, например, гидравлическим упором с возможностью его фиксации от перемещений вдоль оси сопла в обоих направлениях, позволяет при отсутствии управляющего сигнала из системы изменения вектора тяги по курсу фиксировать поршень гидроцилиндра в середине его рабочего хода и заставляет гидроцилиндр работать как обычную подвижную тягу, связывающую тандемный гидроцилиндр с подвижными роликами, перемещающимися по направляющим, со сверхзвуковыми створками, обеспечивая в этом случае получение как бесфорсажных, так и форсажных режимов двигателя, при поступлении управляющего сигнала от системы изменения вектора тяги по курсу позволяет фиксировать шток тандемного гидроцилиндра от продольного перемещения, снимать поршень основного гидроцилиндра с гидравлического упора и заставляет работать каждый основной гидроцилиндр как привод подвижных роликов, перемещающихся по направляющим, и, тем самым, обеспечивать поворот сверхзвуковых створок за счет перемещения одновременно поршней от своего среднего положения, с одной стороны в правую сторону, с другой - в левую и наоборот в зависимости в какую сторону поступил управляющий сигнал на изменение на заданный угол по курсу направления вектора тяги.
При установке на летательный аппарат одинаковых пар двигателей, выполнение на каждом двигателе и на каждом гидроцилиндре ближайших к сверхзвуковой створке механических упоров, расположенных в левом и правом крайних положениях от его среднего положения рабочего хода поршня и дополнительной связи с задатчиком максимального отклонения сверхзвуковых створок системы управления изменения вектора тяги в противоположные стороны на каждом двигателе пары, позволяет максимально отклонить сверхзвуковые створки на одном двигателе в одну сторону, а на другом двигателе пары - в противоположную и тем самым обеспечить загораживание горячих частей у каждого двигателя более холодными сверхзвуковыми створками, уменьшить ИК-заметность в задней полусфере двигателя и одновременно уравновесить момент относительно вертикальной оси летательного аппарата, возникающий от поворота вектора тяги на каждом двигателе пары.
Такое конструктивное выполнение выходного двухмерного сопла воздушно-реактивного двигателя обеспечивает оптимальное сочетание габаритов и веса сопла с обеспечением работы на бесфорсажных и форсажных режимах одновременным управлением режимами изменения вектора тяги, как по курсу, так и по тангажу, а также управление режимами реверса тяги и при установке на летательный аппарат одинаковых пар двигателей уменьшает ИК-заметность в задней полусфере двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОСКОЕ СОПЛО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2011 |
|
RU2462609C1 |
| ВЫХОДНОЕ УСТРОЙСТВО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 2008 |
|
RU2367810C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2770572C1 |
| РЕГУЛИРУЕМОЕ СОПЛО | 2015 |
|
RU2613358C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2768659C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2773171C1 |
| РЕГУЛИРУЕМОЕ СОПЛО АВИАЦИОННОГО ДВИГАТЕЛЯ С ОТКЛОНЯЕМЫМ ВЕКТОРОМ ТЯГИ | 1997 |
|
RU2142571C1 |
| ПЛОСКОЕ СОПЛО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 2010 |
|
RU2445486C1 |
| Регулируемое сопло турбореактивного двигателя | 2021 |
|
RU2768648C1 |
| ВОЗДУШНО-РЕАКТИВНЫЙ ДВИГАТЕЛЬ С РЕВЕРСОМ ТЯГИ | 2003 |
|
RU2232282C1 |
Выходное двухмерное сопло для воздушно-реактивного двигателя содержит корпус, створки, шарнирно связанные с корпусом и между собой, шарнирно-рычажные системы, соединенные со створками и приводами, системы управления режимами изменения вектора тяги и реверса тяги двигателя. Створки размещены внутри корпуса сопла вдоль боковых стенок. На боковых стенках выполнено по одному сквозному окну, закрываемому панелями. Каждая панель связана тягой с соответствующей ей подвижной сверхзвуковой створкой. Шарнирно-рычажная система управления каждой створкой состоит из пар тандемно соединенных пневмоцилиндра и гидроцилиндра или двух гидроцилиндров. В верхней и нижней стенках корпуса сопла выполнены окна, закрытые створкой. В проеме каждого окна между передней его стороной и общим шарниром установлены направляющие, в которых размещены подвижные ролики. На верхней и нижней стенках корпуса сопла установлены направляющие, в которых расположены подвижные секции панелей. Изобретение позволит обеспечить во всем эксплуатационном диапазоне регулирование режимов двигателя, изменение вектора тяги по тангажу и по курсу, а также обеспечить реверс тяги. 2 з.п. ф-лы, 10 ил.
| US 5392991 A, 28.02.1995 | |||
| DE 4200645 A1, 06.08.1992 | |||
| Стенд для динамических испытанийМЕХАНичЕСКиХ пЕРЕдАч | 1979 |
|
SU800770A1 |
| Устройство для замораживания пищевых продуктов | 1978 |
|
SU763653A1 |
| УСТРОЙСТВО РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С РАСПОЛОЖЕННЫМИ СЗАДИ ПО ПОТОКУ ОТКЛОНЯЮЩИМИ ПРЕПЯТСТВИЯМИ, СТРЕМЯЩИМИСЯ К УРАВНОВЕШИВАНИЮ | 1996 |
|
RU2134811C1 |
| РЕАКТИВНОЕ СОПЛО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ СО ВСТРОЕННЫМ МЕХАНИЗМОМ РЕВЕРСА | 2000 |
|
RU2194872C2 |

