Изобретение относится к управляемым средствам воздействия на поток текучей среды и предназначено для создания пневмораспределителя, отвечающего технико-экономическим требованиям автомобильной промышленности.
Известен гидрораспределитель типа В6 (ГОСТ 24679-81) с пилотами управления типа П6 (ТУ2-053-1754-85) Указанный гидрораспределитель содержит корпус, в котором выполнены каналы для подключения напорных и сливных линий. В центральном отверстии корпуса расположен золотник, который через толкатели перемещается пилотными клапанами (В.К.Свешников, А.А.Усов. Станочные гидроприводы. М.: Mашиностроение, 1988).
Известный гидрораспределитель хаpaктеризуется значительной, увеличивающейся во времени величиной объемных потерь, высокой стоимостью.
Известен затвор трубопровода, содержащий корпус с крышкой, золотник, седло и прокладки. Затвор приводится в действие через шпиндель вручную или с помощью электродвигателя через специальную систему перемещающихся шарнирно соединенных тяг. (Л.В.Деев, Н.А.Балахичев Котельные установки и их обслуживание. М.: Высшая школа, 1990).
Известное устройство не обеспечивает полной герметичности, нуждается в постоянном техническом уходе, имеет значительные габариты.
Наиболее близким к предлагаемому устройству является электромагнитный клапан. Известный клапан содержит корпус с седлом клапана, золотник, одновременно являющийся сердечником электромагнита, электромагнитную систему, запорную пружину. (В.К.Свешников, А.А.Усов. Станочные гидроприводы. М.: Машиностроение, 1988).
Известный электромагнитный клапан обладает низким расходом из-за малого проходного сечения каналов. Увеличение проходных сечений приводит к росту усилия запирания, обеспечиваемого запорной пружиной, а следовательно, к резкому росту массы и стоимости электромагнита.
Целью изобретения является создание массового пневмораспределителя для пневмосистем автомобильного транспорта.
Поставленная цель достигается за счет выполнения золотника в виде герметичной анизотропной оболочки, сообщенной с энергоносителем. Золотниковая пара образована внешней поверхностью герметичной анизотропной оболочки и внутренней профилированной поверхностью корпуса. Управление движением рабочего тела осуществляется за счет изменения геометрических размеров оболочки при варьировании параметров энергоносителя. Внутренняя полость герметичной анизотропной оболочки сообщена с замкнутой эластичной оболочкой. Внутренние полости обоих оболочек заполненной жидкостью, а соотношение эластичности обоих оболочек и жесткости возвратной пружины позволяет замкнутой эластичной оболочке компенсировать тепловые деформации жидкости. Корпус устройства содержит хотя бы две изолированные друг от друга полости. В одной из полостей выполнены каналы для подвода и реверсивного движения рабочего тела, а также расположена герметичная анизотропная оболочка. Во второй находится эластичная оболочка, при этом полость с эластичной оболочкой посредством пилотного клапана поочередно сообщается с источником энергоносителя или атмосферой. Внутренняя поверхность корпуса выполнена профилированной и содержит хотя бы один радиальный и осевой канал. При этом один из радиальных каналов взаимодействует с герметичной анизотропной оболочкой по ее боковой поверхности в задней части. Второй боковой канал вообще не взаимодействует с герметичной анизотропной оболочкой, а осевой канал взаимодействует с торцевой поверхностью герметичной анизотропной оболочки. Внутренние торцевая и боковая поверхности корпуса имеют геометрию, естественным образом обеспечивающую герметичность и отсутствие износа контактирующих поверхностей в зоне силового контакта торцевой и боковой поверхностей оболочки с внутренними торцевой и боковой поверхностями корпуса. Силовой контакт торцевой поверхности герметичной анизотропной оболочки с торцевой поверхностью корпуса обеспечивается за счет внутренней энергии пружины, расположенной внутри и/или вне герметичной анизотропной оболочки. Торцевая поверхность эластичной анизотропной оболочки содержит присоединительный элемент и хотя бы одно кинематическое звено, позволяющее устанавливать внешнюю пружину, датчики обратной связи и объединять заявленные управляющие элементы в последовательные и параллельные секции.
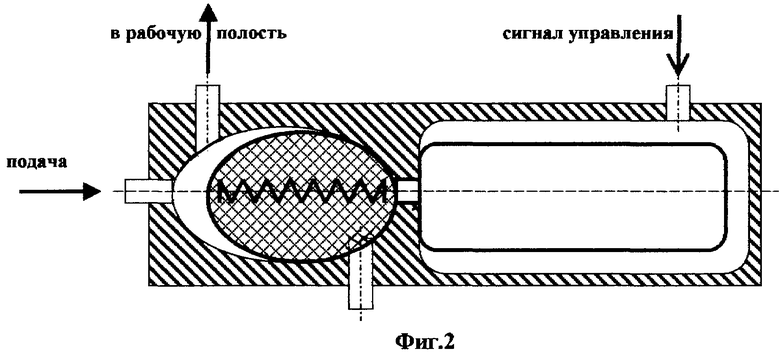
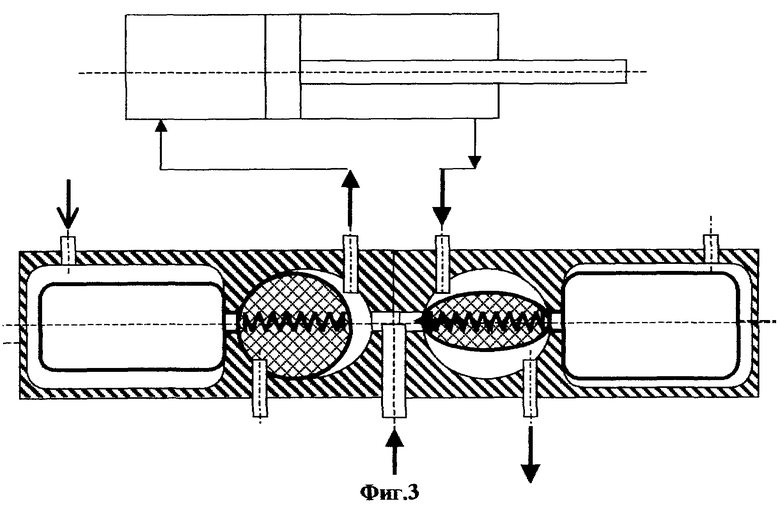
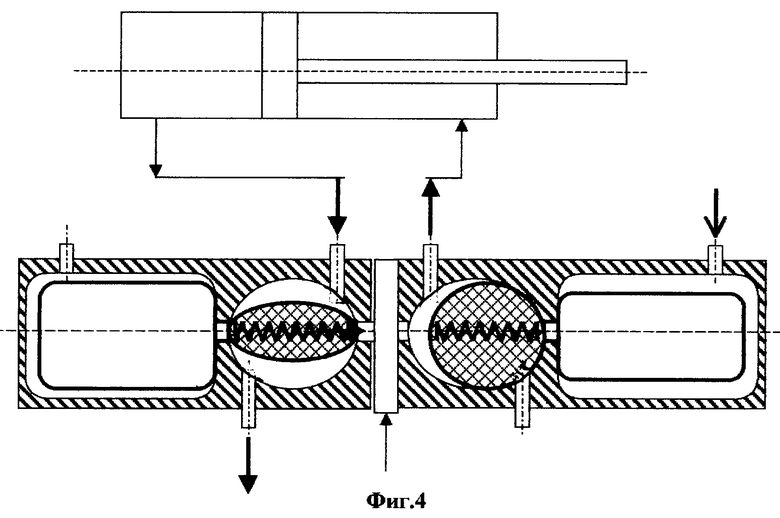
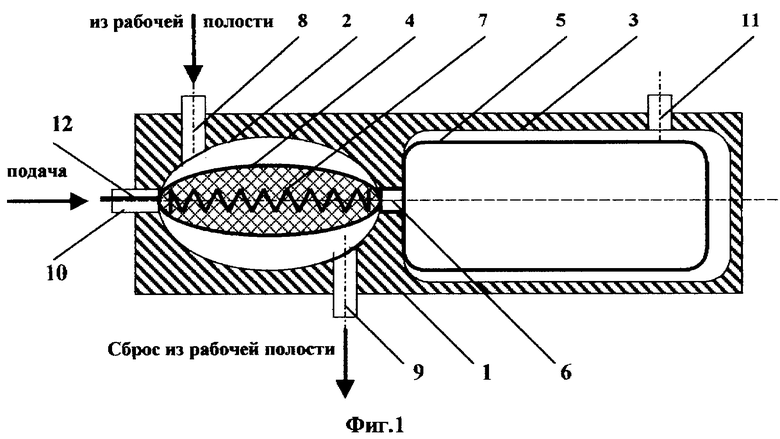
На фиг.1 представлен общий вид заявленного устройства в выключенном состоянии. На фиг.2 представлен общий вид заявленного устройства во включенном состоянии. На фиг.3 представлен общий вид пневмораспределителя при встречно-параллельном включении заявленных устройств и прямом включении пневмоцилиндра. На фиг.4 представлен общий вид пневмораспределителя при встречно-параллельном включении заявленных устройств и реверсивном включении пневмоцилиндра.
Управляющий элемент гидропневмоавтоматики содержит полый корпус 1, в котором выполнена полость 2 с профилированной внутренней поверхностью и полость 3. Внутри полости 2 расположена герметичная анизотропная оболочка 4. Внутри полости 3 расположена эластичная оболочка 5. Оболочки 4 и 5 сообщены между собой посредством канала 6. Внутри оболочки 4 расположена возвратная пружина 7. Полость 2 корпуса 1 содержит два радиальных канала 8 и 9 и осевой канал 10. Полость 3 содержит канал 11. Торцевая поверхность оболочки 4 содержит кинематическое звено 12.
Управляющий элемент гидропневмоавтоматики работает следующим образом. При увеличении внутренней энергии энергоносителя, заключенной в герметичной анизотропной оболочке 1 любым известным способом (за счет увеличения давления, увеличения количества, нагрева, химической реакции и т.д.) последняя начинает деформироваться. Если в начальном положении сечение образующей поверхности герметичной анизотропной оболочки 4 представляет собой цилиндр, то в предельном положении сечение оболочки представляет собой параболическую бочку.
В начальном положении торцевая поверхность герметичной анизотропной оболочки 4 за счет возвратной пружины 7 перекрывает осевой канал 10. При этом каналы 8 и 9 сообщены между собой.
При изменении геометрии герметичной анизотропной оболочки 4 ее торцевая поверхность отходит от канала 10, а боковая поверхность перекрывает канал 9. При этом каналы 10 и 8 оказываются сообщенными между собой.
Поскольку внешняя поверхность герметичной анизотропной оболочки 4 в этом случае попадает под действие полного давления рабочего тела, то возникает необходимость создания внутри оболочки давления, превышающего внешнее. Это может достигаться за счет превышения давления управления над рабочим в самой пневмосистеме, либо искусственно. В последнем случае в полости 3 корпуса 1 располагают эластичную оболочку 5, которую посредством канала 6 сообщают с внутренней полостью герметичной анизотропной оболочки 4. Обе оболочки заполняют жидкостью. Совокупность оболочек 4 и 5 с каналом 6 представляет собой классический усилитель давления, за счет работы которого и обеспечивается требуемое превышение давления управления в оболочке 4 над рабочим давлением в полости 2. В этом случае канал 11 полости 3 посредством пилотного клапана (на схеме условно не показан) сообщают с источником давления рабочего тела.
Посредством кинематического звена 12 заявленный управляющий элемент гидропневмоавтоматики может соединяться в последовательные или параллельные секции с образованием различных конструкций распределителей. Вариант такого объединения с образованием пятилинейного распределителя показан на фиг.3 и фиг.4. При этом на фиг.3 представлен общий вид пневмораспределителя при встречно-параллельном включении заявленных устройств н прямом включении пневмоцилиндра. На фиг.4 представлен общий вид пневмораспределителя при встречно-параллельном включении заявленных устройств и реверсивном включении пневмоцилиндра.
Заявленный элемент трансформируется во все известные элементы гидропневмоавтоматики Действительно:
При подаче рабочего тела через канал 10:
- и создании внутри герметичной анизотропной оболочки 4 дискретного, фиксированного давления и перекрытии одного из каналов 8, 9 заявленный элемент трансформируется в управляемый дроссель с положительной или отрицательной обратной связью между давлением и расходом;
- и сообщении канала 11 с одним из каналов 8 или 9 заявленный элемент трансформируется в регулятор давления, работающий “по входу” или “по выходу”.
- и монотонном, наперед заданном изменении давления в полости 3 заявленный элемент трансформируется в клапан “мягкого пуска” при разгоне привода и управляемый демпфер при торможении привода.
- и выполнении в полости 2 нескольких каналов 9, разнесенных между собой в радиальном и осевом направлении и монотонном или дискретном, наперед заданном изменении давления в полости 3 заявленный элемент трансформируется в силовую систему управления, осуществляющую цикловое управления несколькими приводами по давлению на сбросе.
При подаче рабочего тела через канал 8:
- и монотонном или дискретном, наперед заданном изменении давления в полости 3 заявленный элемент трансформируется в двойной регулятор расхода с обратными расходными характеристиками
- и сообщении канала 11 с каналом 10 заявленный элемент трансформируется в отсечной клапан аварийного отключения разрушенного участка пневмогидросистемы от источника питания.
При подаче рабочего тела через канал 9, при этом канал 8 сообщен с рабочим органом, канал 10 - дренаж, заявленный элемент трансформируется в отсечной клапан аварийного отключения источника питания от разрушенного участка пневмогидросистемы.
Заявленное устройство позволяет реализовать управляемый элемент запорно-регулирующей трубопроводной арматуры, обладающий полной герметичностью и не требующий постоянного технического ухода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД МЕХАНИЗМА ИЗМЕНЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВИЖНЫХ ЭЛЕМЕНТОВ КУЗОВОВ, САЛОНОВ, КАБИН ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2204741C2 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2002 |
|
RU2247875C2 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2002 |
|
RU2255251C2 |
| ТОРОВАЯ МЕХАНИЧЕСКАЯ МЫШЦА | 1999 |
|
RU2204061C2 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ | 2019 |
|
RU2711225C1 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2000 |
|
RU2224916C2 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| ПНЕВМОРАСПРЕДЕЛИТЕЛЬ | 2019 |
|
RU2715452C1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ ЗОЛОТНИКОВЫЙ ЭЛЕКТРОПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2266439C2 |
| СМЕСИТЕЛЬНЫЙ КЛАПАН | 1993 |
|
RU2091653C1 |
Управляемый элемент гидропневмоавтоматики предназначен для управления потоком текучей среды. Управляющий элемент гидропневмоавтоматики содержит корпус с каналами для подвода и реверсивного движения рабочего тела, золотниковую пару, возвратную пружину, при этом золотник управляющего элемента гидропневмоавтоматики выполнен в виде герметичной анизотропной оболочки, сообщенной с энергоносителем, золотниковая пара образована внешней поверхностью герметичной анизотропной оболочки и внутренней профилированной поверхностью корпуса, а управление движением рабочего тела осуществляется за счет изменения геометрических размеров оболочки при варьировании параметров энергоносителя, при этом корпус содержит хотя бы две изолированные друг от друга полости, в одной из которых выполнены каналы для подвода и реверсивного движения рабочего тела, а также расположена герметичная анизотропная оболочка, а во второй находится эластичная оболочка, причем внутренняя поверхность корпуса, сообщающегося с анизотропной оболочкой, выполнена профилированной и содержит хотя бы два радиальных канала, разнесенных по длине корпуса, и один осевой канал, при этом один из радиальных каналов взаимодействует с герметичной анизотропной оболочкой по ее боковой поверхности в опорной части, второй боковой канал не взаимодействует с герметичной анизотропной оболочкой, а осевой канал взаимодействует с торцевой поверхностью герметичной анизотропной оболочки. Технический результат – повышение надежности. 3 з.п. ф-лы, 4 ил.
| СВЕШНИКОВ В.К., УСОВ А.А | |||
| Станочные гидроприводы | |||
| - М.: Машиностроение, 1988, с | |||
| Ножевой прибор к валичной кардочесальной машине | 1923 |
|
SU256A1 |
| GB 1431471 A, 07.04.1976 | |||
| US 3450340 A, 17.06.1969 | |||
| Регулирующий дроссель | 1975 |
|
SU520482A1 |
| Цифровой преобразователь давления | 1983 |
|
SU1143894A1 |

