Предлагаемое изобретение относится к области оптико-электронной техники и может быть использовано при изготовлении приборов ночного видения для самых разнообразных условий эксплуатации.
Наиболее близким по технической сущности является прибор ночного видения по патенту №2121158.
Недостатком прибора ночного видения является субъективная оценка информации при ориентировании на местности - значений азимута, угла места и дальности до объекта наблюдения, что ограничивает возможности при наблюдении и ориентировании ночью.
Целью настоящего изобретения является обеспечение ввода в поле зрения прибора ночного видения цифровых значений информации об азимуте, угле места и дальности до объекта наблюдения за счет использования электронного компаса для измерения азимута, инклинометра для измерения угла места, знакоиндикаторов и дальномерной шкалы на просветных жидкокристаллических индикаторах (ЖКИ) в фокальной плоскости окуляров.
Эта цель достигается тем, что в приборе ночного видения, содержащем объектив, электронно-оптический преобразователь прямого переноса с блоком питания (ЭОП), генератор переменного тока с механизмом вращения, выпрямитель напряжения, ионистор, оборачивающую систему с разделением каналов на оба глаза и окуляров, в фокальной плоскости окуляров установлены ЖКИ с центральным знаком, дальномерной шкалой и цифровыми сегментами, ЖКИ соединены с драйверным блоком управления (БД), БД соединен с микропроцессорным блоком (БМ), два феррозонда соединены с блоком обработки сигналов с феррозондов (БОФ), БОФ соединен с БМ, инклинометр соединен с блоком обработки сигнала инклинометра (БОИ), БОИ соединен с БМ, блок управления и переключений (БУП) соединен с БМ, при этом феррозонды установлены один параллельно, другой перпендикулярно оптической оси объектива в горизонтальной плоскости, а инклинометр установлен параллельно оптической оси объектива в вертикальной плоскости.
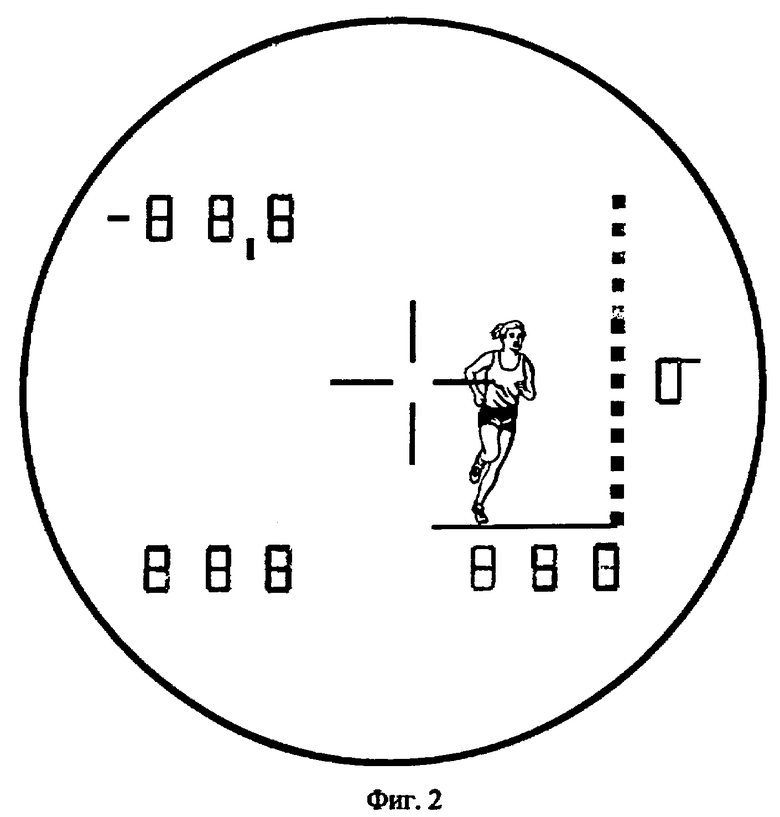
Конструктивное исполнение варианта прибора ночного видения показано на фиг.1. Здесь содержатся объектив 1, ЭОП 2, лупа 3, зеркала 4 и 15 для разделения каналов, зеркала 5 и 13 для формирования каналов, телескопические системы 6, 7, 9 и 10, 12, 13 с окулярами 9 и 10, ЖКИ 8 и 11, механизм вращения MB, генератор переменного тока Г, выпрямитель напряжения ВН, ионистор И, микропроцессорный блок БМ, феррозонды Ф1 и Ф2, блок БОФ, инклинометр ИН, блок БОИ, блок БУП.
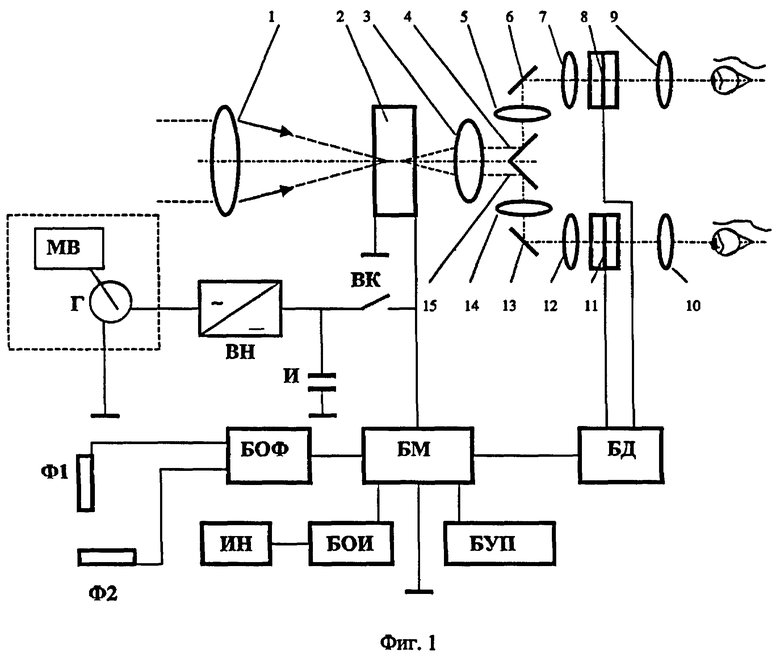
Принцип действия прибора ночного видения заключается в следующем. Объектив 1 формирует перевернутое изображение объектов в плоскости фотокатода ЭОП 2, ЭОП осуществляет усиление яркости изображения, изображение с экрана ЭОП 2 переносится с оборачиванием в фокальную плоскость окуляров 9 и 10 с помощью лупы 3, объективов 6, 14 и коллективов 7, 12. Зеркала 4, 5, 13 и 15 формируют каналы для глаз. В фокальной плоскости окуляров установлены просветные ЖКИ, на которых нанесены центральный знак, знакоиндикаторы и дальномерный столбик переменной высоты. Феррозонды Ф1 и Ф2 - магнитные датчики, каждый из которых представляет собой катушку с помещенным внутрь сердечником из материала с определенными свойствами (Афанасьев Ю.В. " Феррозонды ", "Энергия", 1969 г.), расположены перпендикулярно (Ф1) и параллельно (Ф2) оптической оси объектива прибора и установлены на осях качания, параллельной (для Ф1) и перпендикулярной (для Ф2) оптической оси объектива прибора, за счет чего происходит горизонтирование датчиков под действием силы тяжести при наклонах прибора вверх или вниз от земного горизонта. Сигналы от Ф1 и Ф2 обрабатываются блоком обработки сигнала БОФ и, в зависимости от ориентации прибора в горизонтальной плоскости относительно магнитного поля Земли, после обработки в БМ подаются на ЖКИ через блок БД, высвечивая соответствующее значение магнитного азимута на знакоиндикаторах ЖКИ. При разряде ионистора И блок БМ питания подает сигнал на ЖКИ для ввода какого-либо знака в мигающий режим, сигнализируя наблюдателю о необходимости подзарядки ионистора генератором тока от ручного воздействия на механизм вращения. Включение прибора осуществляется одним включателем ВК. Инклинометр ИН (журнал “Новые компоненты” (приложение к журналу “Электронные компоненты”), №1 (9), 1999 г., с. 34, Павленко В., Тросман В. Емкостные датчики для измерения перемещений.) установлен в вертикальной плоскости параллельно оптической оси объектива. Сигнал от ИН, в зависимости от угла места объекта наблюдения, обрабатывается блоком БОИ и подается на ЖКИ через блок БД, высвечивая соответствующее значение угла места объекта на знакоиндикаторах ЖКИ. На блоке БУП расположены органы управления - переключатели режимов: режима измерения магнитного азимута, режима измерения угла места объекта наблюдения, режима измерения дальности до объекта наблюдения. В режиме измерения дальности БМ активизирует на БУП переключатель величины высоты (базы) известного объекта наблюдения (фигуры человека, высоты транспортного средства или др.) и кнопки увеличения или уменьшения высоты дальномерного столбика на ЖКИ для сравнения высот объекта и столбика на ЖКИ при наблюдении, при этом БМ вычисляет дальность до объекта по известным высоте объекта, фокусному расстоянию объектива прибора и набранной высоте столбика на ЖКИ (Кулагин С.В., Гоменюк А.С., Дикарев В.Н. и др. Оптико-механические приборы. М., Машиностроение, 1984 г., стр. 231, формула 17.3). Поле зрения такого варианта показано на фиг.2. В центре поля зрения на ЖКИ расположено центральное перекрестие для визирования на объект наблюдения, слева в верхней части поля зрения - знакоиндикаторы угла места объекта (знак минус высвечивается при отрицательных значениях угла места), слева в нижней части поля зрения -знакоиндикаторы, показывающие значение магнитного азимута, справа - дальномерный многосегментный столбик, нижняя базовая линия, знакоиндикаторы значения дальности до объекта и знакоиндикаторы, информирующие о типе объекта наблюдения (например, устанавливая кнопку переключения типа объекта наблюдения на БУП до высвечивания “С”, измерение дальности можно производить по силуэту фигуры человека; до высвечивания “Т” - по транспортному средству, по дальномерной шкале определяется дальность до человека, цифровые значения дальности соответственно пересчитываются в БМ с учетом высоты объекта. При разряде ионистора запятая на знакоиндикаторах угла места переводится БМ в мигающий режим, сигнализируя о необходимости подзарядки генератором тока от ручного воздействия на механизм вращения. Малые токи потребления схем управления ЖКИ (порядка 5-7 мА) позволяют сохранить режим безбатарейного питания от ионистора.
Положительный эффект от предлагаемых технических решений заключается в обеспечении ввода в поле зрения прибора ночного видения цифровых значений информации об азимуте, угле места и дальности до объекта наблюдения за счет использования электронного компаса для измерения азимута, инклинометра для измерения угла места, знакоиндикаторов и дальномерной шкалы на просветных жидкокристаллических индикаторах (ЖКИ) в фокальной плоскости окуляров при сохранении режима безбатарейного питания от ионистора и генератора тока с ручным механизмом вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ПРИЦЕЛ НОЧНОГО ВИДЕНИЯ | 2002 |
|
RU2296938C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ НАБЛЮДАТЕЛЬНЫЙ ПРИБОР | 2001 |
|
RU2211467C2 |
| БИНОКУЛЯРНЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 1998 |
|
RU2147761C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ | 2004 |
|
RU2263937C1 |
| Активно-импульсный прибор наблюдения | 2021 |
|
RU2757559C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ | 1999 |
|
RU2182718C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР НАБЛЮДЕНИЯ | 1993 |
|
RU2042164C1 |
| Прибор наблюдения-прицел с устройством ввода дальномерной марки | 2017 |
|
RU2675494C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ | 1997 |
|
RU2121158C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ | 1996 |
|
RU2130196C1 |
Изобретение относится к области оптико-электронной техники. Техническим результатом является обеспечение ввода в поле зрения прибора цифровых значений информации об азимуте, угле места и дальности до объекта наблюдения. Прибор ночного видения, состоящий из объектива, электронно-оптического преобразователя прямого переноса с блоком питания (ЭОП), генератора переменного тока с механизмом вращения, выпрямителя напряжения, ионистора, оборачивающей системы с разделением каналов на оба глаза и окуляров. В фокальной плоскости окуляров установлены жидкокристаллические индикаторы с центральным знаком, дальномерной шкалой и цифровыми сегментами (ЖКИ), ЖКИ соединены с драйверным блоком управления (БД), БД соединен с микропроцессорным блоком (БМ), два феррозонда соединены с блоком обработки сигналов с феррозондов (БОФ), БОФ соединен с БМ, инклинометр соединен с блоком обработки сигнала инклинометра (БОИ), БОИ соединен с БМ, блок управления и переключении БУП соединен с БМ, при этом феррозонды установлены один параллельно, другой перпендикулярно оптической оси объектива в горизонтальной плоскости, а активизация на БУП различных режимов измерения и обработки сигналов, поступающих с феррозондов и инклинометра, осуществляется через БОФ и БОИ соответственно с помощью микропроцессорного блока БМ с последующей подачей обработанных сигналов БД на ЖКИ для визуализации цифровых значений измеренных параметров. 2 ил.
Прибор ночного видения, состоящий из объектива, электронно-оптического преобразователя прямого переноса с блоком питания (ЭОП), генератора переменного тока с механизмом вращения, выпрямителя напряжения, ионистора, оборачивающей системы с разделением каналов на оба глаза и окуляров, отличающийся тем, что в фокальной плоскости окуляров установлены жидкокристаллические индикаторы с центральным знаком, дальномерной шкалой и цифровыми сегментами (ЖКИ), ЖКИ соединены с драйверным блоком управления (БД), БД соединен с микропроцессорным блоком (БМ), два феррозонда соединены с блоком обработки сигналов с феррозондов (БОФ), БОФ соединен с БМ, инклинометр соединен с блоком обработки сигнала инклинометра (БОИ), БОИ соединен с БМ, блок управления и переключений соединен с БМ, при этом феррозонды установлены один параллельно, другой перпендикулярно оптической оси объектива в горизонтальной плоскости, инклинометр установлен параллельно оптической оси объектива в вертикальной плоскости, а активизация на БУП различных режимов измерения и обработки сигналов, поступающих с феррозондов и инклинометра, осуществляется через БОФ и БОИ соответственно с помощью микропроцессорного блока БМ с последующей подачей обработанных сигналов БД на ЖКИ для визуализации цифровых значений измеренных параметров.
| ПРИБОР НОЧНОГО ВИДЕНИЯ | 1997 |
|
RU2121158C1 |
| ЛАЗЕРНЫЙ ПЕРЕДАТЧИК ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 1995 |
|
RU2126125C1 |
| ПРИБОР НОЧНОГО ВИДЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2165634C1 |
| US 6087660 A, 11.07.2000 | |||
| US 5528483 A, 18.06.1996. | |||

