Изобретение относится к области систем технического зрения, к распознаванию и считыванию маркировочных символов, в частности, на поверхности труб нефтяного сортамента.
Известен способ распознавания символов на основе систем технического зрения с помощью видеокамеры, заключающийся в механическом сканировании строки текста и обработке информации вычислителем (микроЭВМ). В.И. Сырямкин и др. Системы технического зрения, Томск, МГП “РАСКО”, Справочник, 1993, с.253.
Недостатком способа являются небольшие поля обзора и размеры объекта (не боле 50×30), большой радиус кривизны объекта (не менее 1,5 м), распознавание только арабских цифр.
Наиболее близким к предложенному является способ получения изображения развертки поверхности деформированных цилиндрических объектов, в котором контролируемую поверхность трубы освещают, вращая трубу вокруг своей оси, и с помощью видеокамер формируют изображение контролируемой поверхности с последующей компьютерной обработкой (патент России №2155378, публ. 27.08. 2000 г.).
К недостаткам способа следует отнести недостаточно четкое считывание маркировочного символа при любом возможном его положении относительно объектива видеокамеры.
Целью изобретения является повышение информативности и надежности распознавания и считывания, а также минимизация искажения изображения.
Поставленная цель достигается тем, что в известном способе оптико-телевизионного распознавания и считывания маркировочных символов на поверхности труб, в котором контролируемую поверхность трубы освещают, вращая трубу вокруг своей оси, и, с помощью видеокамер, формируют изображение с последующей компьютерной обработкой, одновременно с вращением трубу перемещают вдоль продольной оси со скоростью Vп=0,01-0,02 м/с, при этом производят кадровую синхронизацию изображения и считывание маркировочных символов на контролируемой поверхности, вращение трубы осуществляют со скоростью Vт=0,1-1,0 с-1, а освещение производят монохроматическим светом и, наиболее четкое изображение достигается с использованием монохроматического света с длиной волны L=620-650 нм.
Технический результат изобретения достигается в возможности считывания символов в любом положении относительно объективов видеокамер.
Сущность способа состоит в том, что подлежащую контролю трубу помещают в светоэкранирующий кожух и начинают вращать с постоянной угловой скоростью при одновременном продольном перемещении вдоль продольной оси. Контролируемую поверхность освещают монохроматическим светом. Одновременно производят кадровую синхронизацию изображения и считывание маркировочных символов видеокамерами, расположенными в кожухе.
Полученное изображение с помощью специального программного обеспечения обрабатывается компьютером и заносится в базу данных. Результаты измерений могут быть выведены на дисплей в текстовом или графическом виде или распечатаны. Необходимость вращения и продольного перемещения трубы вызваны неопределенностью положения маркировочных символов на поверхности трубы относительно объективов видеокамер.
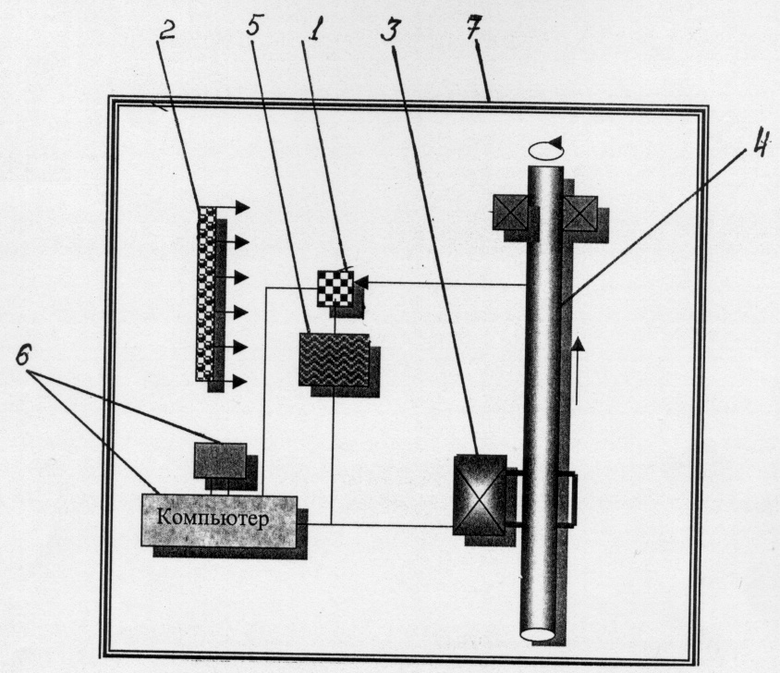
Предложенный способ реализуется устройством, которое поясняется чертежом, где представлена общая схема устройства.
Устройство содержит систему технического зрения в виде видеокамер 1, источник излучения 2, блок поворота и продольного перемещения 3 трубы 4, кадровый синхронизатор 5, систему обработки полученной информации 6 и светоэкранирующий кожух 7. Все элементы устройства связаны с контролируемой поверхностью трубы 4 посредством системы оптического сопряжения. Системы технического зрения в виде видеокамер 1, оптического сопряжения с контролируемой поверхностью, источник излучения 2, блок поворота и продольного перемещения 3 трубы 4 и система обработки полученной информации 6 размещены в светоэкранирующем кожухе 7. В качестве источника излучения 2 используют источник монохроматического света.
Способ реализуется следующим образом.
Способ предназначен для считывания цифровых, буквенных и специальных символов с цилиндрических поверхностей труб нефтяного сортамента, имеющих остаточные следы загрязнения нефтепродуктами и продуктами коррозии. Исходная информация представляет собой маркировочные символы, образованные точками, представляющими собой несквозные отверстия с известными размерами, глубиной и шагом, нанесенные на боковую поверхность трубы методом лазерной гравировки. Диаметр маркировочной точки равен 0,5-0,7 мм, расстояние между центрами точек, лежащих на одной линии символа до 1,5 мм, глубина маркировочных точек равна 0,1-0,7 мм.
Для считывания предъявляются трубы со свеженанесенной надписью и следами продуктов коррозии на наружной поверхности, а также со следами нефтепродуктов.
Труба 4 устанавливается таким образом, что поле маркировки оказывается в поле зрения видеокамер 1 (количество камер выбирается в зависимости от размеров зоны контроля). После чего, для обнаружения надписи на боковой поверхности трубы 4, ее начинают вращать вокруг продольной оси с угловой скоростью, величина которой зависит от качества нанесения, размеров и фона надписи и выбирается экспериментально. Одновременно осуществляют перемещение трубы 4 вдоль ее продольной оси. Скорость вращения и перемещения синхронизируется с кадровой разверткой камер 1 кадровым синхронизатором 5. На позицию считывания могут поступать трубы с муфтами разных диаметров нефтяного сортамента.
Данное устройство, реализующее предложенный способ, позволяет обнаружить наличие символов на боковой поверхности трубы при непрерывном вращении и продольном перемещении трубы с вероятностью не менее 0,95. Необходимость вращения и перемещения трубы вызвана неопределенностью положения маркировочных символов на поверхности трубы относительно объективов камер 1 и, следовательно, невозможностью считывания символов при некоторых положениях труб. При обнаружении надписи регистрируется изображение боковой поверхности с символами и осуществляется их идентификация. Полученное изображение с помощью специального программного обеспечения обрабатывается компьютером и заносится в базу данных. Результаты измерений могут быть выведены на дисплей в текстовом виде или распечатаны.
В рабочую станцию (PC) АСУ выдаются цифровые значения идентифицированных символов. При невозможности идентификации символа или в спорных случаях предусмотрена возможность визуальной идентификации изображения оператором и “ручная” коррекция текста, используя коэффициенты значимости предложенных значений (и или) и выдача в PC АСУ производства соответствующей информации (например, труба не идентифицирована и т.п.). Устройство обеспечивает возможность записи на жесткий диск изображения надписи для не менее 100 труб в смену. В PC АСУ выдаются сигналы о готовности к началу поиска и считывания маркировочной надписи, а также общей работоспособности аппаратуры.
Момент начала работы определяется моментом прихода сигнала, выдаваемого аппаратурой при начале вращения трубы 4. После окончания записи информации, необходимой для идентификации, аппаратура выдает сигнал, фиксирующий окончание процесса регистрации изображений надписи. Протокол обмена информацией комплекса и PC АСУ производства сохраняется в базе данных.
Таким образом, предложенный способ решает следующие задачи:
- поиск маркировочных символов на боковой поверхности трубы в продольном и поперечном направлениях;
- получение изображения маркировочных символов и ввода полученного изображения в компьютер;
- обработка изображений маркировочных символов и передача полученной информации в цифровом коде в рабочую станцию (РС) АСУ производства;
- возможность сохранения полученной информации в базе данных и возможность ее выдачи в текстовом виде.
Изобретение относится к области систем технического зрения. Его применение при распознавании и считывании маркировочных символов, в частности, на поверхности труб нефтяного сортамента, позволяет получить технический результат в виде повышения надежности считывания и распознавания изображения при одновременном уменьшении искажений изображения. Этот результат достигается благодаря тому, что контролируемую поверхность трубы освещают, вращая трубу вокруг своей оси, и с помощью видеокамер формируют изображение с последующей компьютерной обработкой. Отличия состоят в том, что одновременно с вращением трубу перемещают вдоль продольной оси со скоростью VП=0.01-0.02 м/с, при этом производят кадровую синхронизацию изображения и считывание маркировочных символов на контролируемой поверхности, причем вращение трубы осуществляют со скоростью VТ=0.1-1.0 с-1, а освещение производят монохроматическим светом. 1 з.п. ф-лы, 1 ил.
| Устройство для оптико-телевизионного контроля поверхности трубы | 1990 |
|
SU1775603A1 |
| Устройство оптико-телевизионного контроля | 1991 |
|
SU1837160A1 |
| US 4009467 A, 22.07.1977 | |||
| СЧИТЫВАТЕЛЬ КОДА С ПОВЕРХНОСТИ ТЕЛ ВРАЩЕНИЯ | 2000 |
|
RU2183030C2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

