Настоящее изобретение касается способа измерения перемещения жидкости или газа в трубопроводе, устройства для измерения с помощью ультразвуковых сигналов параметров перемещения потока жидкости или газа в трубопроводе, которое содержит два датчика, а также контура возбуждения для указанного устройства.
Измерения параметров потока используются при расчетах и разовых измерениях потоков в жидкой или газообразной фазе, а также для комплексного расчета потоков. Полезной информацией, поступающей от системы измерений, может быть мгновенное значение величины или параметра потока, значение, усредненное по времени или усредненное значение параметров потока или величина, подсчитанная в интервале времени. Измерения мгновенных или усредненных параметров потока чаще всего применяются в процессах производства, для которых необходимо знать, контролировать или регулировать параметры одного или нескольких потоков, включенных в этот процесс. Измерения объемов, являющиеся результатом интеграции измерений параметров в определенном временном интервале, позволяют реализовать расчеты, используемые для заполнения и/или опустошения резервуара, а также для перемещения потоков между клиентом и поставщиком. Желательно, чтобы объем, перемещаемый таким образом, был достаточно точно определен.
Кроме того, данная система измерения параметров имеет преимущества, такие как автономность, в качестве источника питания требуется только электрический источник типа батареи аккумуляторов или стандартное распределение переменного тока 50 или 60 Гц.
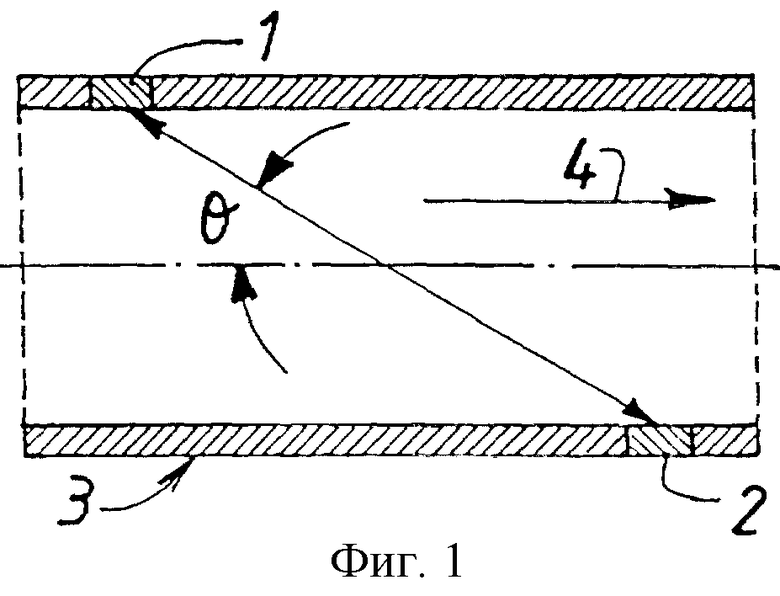
В области измерения параметров в целом и метрологии потоков в частности были предложены многочисленные методики с использованием ультразвуковых устройств. В большинстве таких систем используется так называемая методика времени прохождения. На фиг.1 приведена принципиальная схема известного измерителя параметров потока монохордового типа. Первый и второй ультразвуковые датчики 1 и 2 расположены на оболочке трубопровода 3, по которому перемещается поток в направлении, указанном стрелкой 4. В примере, приведенном на фиг.1, трубопровод цилиндрический с круглым сечением, а оба датчика установлены на диаметрально противоположных точках окружности. Кроме того, оба датчика смещены вдоль трубопровода 1. Линия, соединяющая центры датчиков 1 и 2 названа хордой. Она составляет угол 6 с основной осью перемещения потока, которая является осью вращения трубопровода. Длина хорды обозначена буквой L, а внутренний диаметр трубопровода - буквой D. Если первый датчик 1 посылает ультразвуковую волну, то она детектируется вторым датчиком 2 в результате временного смещения T12, названного временем прохождения. Если с - это скорость звука в данном потоке, а V - средняя скорость вдоль хорды, то T12 определяется согласно уравнению

Поменяв ролями функции каждого из двух датчиков, при этом второй датчик 2 становится эмиттером, а первый датчик 1 - приемником, измеряют время T21 прохождения, которое рассчитывается по формуле:

Из формул (1) и (2) получают выражение для средней скорости V движения потока вдоль продольной оси трубопровода, исключая переменную с. При измерении, в котором не обязательно с большой точностью известна скорость распространения звука в потоке и поскольку ее значение зависит от состава, от температуры и от давления данной среды, можно избежать погрешности. Средняя скорость V определяется уравнением:

Расход Q получается при умножении средней скорости V, рассчитанной по формуле (3) на сечение, через которое проходит поток, πD2/4, для кругового сечения, и с учетом некоторых поправочных коэффициентов, как показано ниже:

В данной формуле T1 и T2 представляют собой соответственно длительности распространения ультразвуковой волны вне охватываемой части потока, внешней по отношению к диаметру D для случаев прохождения от первого датчика ко второму и от второго датчика к первому. T1 и Т2 равны, за исключением особого случая, когда могло бы быть передвижение измеряемых этим способом зон. Такие интервалы времени соответствуют, в частности, времени, потраченному ультразвуковой волной на прохождение через различные слои материалов, образующих сам датчик, а также экранирующую зону между датчиком и оболочкой трубопровода. Кh - гидравлический коэффициент ультразвукового измерителя параметров потока. Он служит для коррегирования отбора образцов при измерении. На самом деле принцип различения времени прохождения дает возможность измерять среднюю скорость прохождения потока вдоль хорды измерения, соединяющей датчики. Эта хорда не обязательно представляет собой полную измеряемую поверхность. Тогда возникает погрешность расчетных параметров, которая зависит от реального профиля скорости внутри исследуемого сечения потока. Коэффициент Кh используется, чтобы компенсировать эту погрешность. Этот коэффициент обычно устанавливается после измерения в лабораторных условиях для некоторого разброса значений параметров потока.
Указанный тип измерителя параметров потока (дебитметра) имеет следующие недостатки. Одним из основных факторов, влияющих на точность ультразвукового дебитметра, использующего в работе принцип измерения времени прохождения ультразвука, является точность различных данных измерения времени: T12-T1, T21-T2 и T21-T12, получаемых согласно формуле (4). При времени T12 или T21 порядка сотен микросекунд измерение временных интервалов прохождения ультразвука с точностью порядка 1/1000 не представляет особых проблем. Однако точное измерение разности T12-T21 является значительно более сложным, так как для малых скоростей потока эта величина может быть меньше наносекунды. Точность измерения потока ограничена точностью разности времени прохождения.
Кроме того, в некоторых случаях при использовании измерителя важно располагать данными измерений параметров потока в реальном масштабе времени. Такие случаи применения имеют место, например, в процессах производства, в которых параметры потока будут в дальнейшем регулироваться в зависимости от результатов измерения, и где выигрыш во времени при измерении может быть очень важен для избежания возможного ухудшения качества или потери продукции. Измеритель, приведенный на фиг.1, с трудом позволяет обеспечить измерения в реальном масштабе времени при измерениях, где необходимы последовательные измерения временных интервалов прохождения ультразвука в прямом и обратном направлениях.
Задачей настоящего изобретения является создание способа измерения перемещения жидкости или газа в трубопроводе, устройства для измерения с помощью ультразвуковых сигналов параметров перемещения потока жидкости или газа в трубопроводе, а также контура возбуждения для указанного устройства, которое позволяет повысить точность измерения параметров, осуществлять измерения параметров потока в реальном масштабе времени, улучшить качество и быстроту получения потока с ожидаемыми параметрами, начиная с измеряемых временных интервалов прохождения ультразвука.
Поставленная задача решается согласно изобретению путем создания способа измерения перемещения жидкости или газа в трубопроводе путем расчета разности времен прохождения ультразвуковых сигналов между двумя датчиками в прямом и обратном направлениях, который характеризуется тем, что одновременно возбуждают два датчика от одного средства возбуждения, затем одновременно измеряют сигналы, полученные каждым датчиком от другого датчика, осуществляют синхронное преобразование в цифровую форму сигналов, полученных каждым датчиком, а при расчете разности времен прохождения ультразвуковых сигналов между двумя датчиками определяют функцию взаимной корреляции сигналов датчиков.
Полезно, чтобы расчет разности времен прохождения ультразвуковых сигналов между двумя датчиками включал поиск максимума функции взаимной корреляции сигналов, полученных датчиками.
Предпочтительно, чтобы расчет разности времен прохождения ультразвуковых сигналов между двумя датчиками в прямом и обратном направлениях включал расчет преобразования Хилберта для функции взаимной корреляции сигналов, полученных датчиками.
Целесообразно, чтобы поиск нулевых значений преобразования Хилберта осуществляли с помощью полиномной интерполяции преобразования Хилберта предпочтительно с помощью полинома третьего порядка.
Выгодно, чтобы устанавливали эталон времени путем измерения времени распространения ультразвуковых сигналов за пределами оболочки трубопровода.
Полезно также, чтобы для установки эталона времени осуществляли измерение интервалов времени прохождения сигналов между датчиками для двух жидкостей или газов, движущихся с разной скоростью, которая известна.
Предпочтительно, чтобы осуществляли коррекцию значений величин времени распространения ультразвуковых сигналов за пределами оболочки трубопровода в зависимости от температуры.
Поставленная задача решается также путем создания контура возбуждения для устройства измерения перемещения флюида в трубопроводе между двумя датчиками, определяющего хорду измерения и содержащего средство одновременного возбуждения двух датчиков, средства одновременного измерения сигналов, полученных каждым из двух датчиков, которые поступают от другого датчика, каждое из которых содержит средство синхронного преобразования в цифровую форму указанных сигналов, средство коммутации, предназначенное для последовательного соединения средства одновременного возбуждения и средств одновременного измерения сигналов с датчиками.
Целесообразно, чтобы средство коммутации содержало цепь мультиплексирования.
Полезно, чтобы средство одновременного измерения сигналов, полученных каждым из датчиков, содержало усилитель и аналого-цифровой преобразователь в качестве средства синхронного преобразования в цифровую форму.
Поставленная задача решается также путем создания устройства для измерения перемещения жидкости или газа в трубопроводе, содержащего по меньшей мере два датчика, установленных на трубопроводе, по которому перемещается флюид, контур возбуждения, выполненный как описано выше, и микропроцессор.
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает схему известного измерителя, типа монохордового;
фиг.2 - схему цепи воздействия устройства измерения параметров перемещения потока с помощью ультразвукового сигнала согласно изобретению;
фиг.3 и 4 - продольное сечение и поперечное сечение устройства измерения параметров потока посредством ультразвуков, к которому может прилагаться цепь воздействия согласно изобретению.
Предлагается решение, которое может существенно повысить точность измерения параметров прохождения потока, в котором используют различие временных интервалов между двумя датчиками. Оно прилагается к известным монохордовым и многохордовым измерительным устройствам показанным на фиг.1, а также к измерительным устройствам такого типа, как показан на фиг.3.
Изобретение применяется именно в измерительных устройствах, использующих в работе идентичность сигналов характерных временных промежутков прохождения ультразвука от одного датчика к другому.
Возвращаясь к описанию, приведенному выше, следует отметить, что первый способ расчета разности T21-T12 опирается на исследование максимума функции корреляции между этими двумя сигналами, полученными после прохождения сигнала в направлении от датчика 1 к датчику 2 и в направлении от датчика 2 к датчику 1. Максимальное значение функции корреляции двух сигналов получено для значения, которое показывает разность временных интервалов прохождения сигнала. Подобный расчет разности временных интервалов прохождения удачно осуществляется при использовании пронумерованных сигналов, как будет объяснено ниже. Поскольку изобретение гарантирует, что сигналы имеют схожий режим, расчет корреляции сигналов позволяет получить точность при измерении временных интервалов прохождения значительно ниже, чем при установке эталонов.
Другая методика расчета различия DT=T21-T12 опирается на сведение к нулю в преобразовании Хилберта, обозначенного  - функции межкорреляции между сигналами, полученными после перемещения в одном направлении от датчика 1 к датчику 2 и в направлении от датчика 2 к датчику 1. Эта методика имеет преимущество по сравнению с предыдущей в том, что уменьшает коэффициент отношения сигнала к шуму при косом направлении измерения, то есть разность между истинной и ожидаемой величиной разности во времени. Расчет эффективно проводится с помощью пронумерованных сигналов.
- функции межкорреляции между сигналами, полученными после перемещения в одном направлении от датчика 1 к датчику 2 и в направлении от датчика 2 к датчику 1. Эта методика имеет преимущество по сравнению с предыдущей в том, что уменьшает коэффициент отношения сигнала к шуму при косом направлении измерения, то есть разность между истинной и ожидаемой величиной разности во времени. Расчет эффективно проводится с помощью пронумерованных сигналов.
Отличаются s(n) и r(n) последовательности N точек, пронумерованных одновременно преобразователями системы электронного приема, которые соответствуют полученным сигналам. Исследование различия DT может осуществляться в два этапа: начинают с первой оценки шума, затем, в случае отказа, уточняют эту оценку с помощью интерполяции  вокруг ее нуля. На первом этапе преобразование межкорреляции Хилберта рассчитывается, исходя из двух сигналов s(n) и r(n). Быстрый поиск нуля данной функции, расположенного между минимальным и максимальным значениями этой функции осуществляется, например, с помощью дихотомического расчета. Расчет преобразования Хилберта
вокруг ее нуля. На первом этапе преобразование межкорреляции Хилберта рассчитывается, исходя из двух сигналов s(n) и r(n). Быстрый поиск нуля данной функции, расположенного между минимальным и максимальным значениями этой функции осуществляется, например, с помощью дихотомического расчета. Расчет преобразования Хилберта  может осуществляться через быстрое преобразование Фурье (FFT), как будет пояснено ниже. Начинают с расчета R(f) и S(f), осуществляют преобразования Фурье, соответствующие r(n) и s(n). Далее последовательно изменяют S(f), чтобы получить S*(f), и умножают ее на R(f). Затем результат R(f)(S*(f) умножается в области частот на j·sign(-f) при j2=-1 и sign(-f) функции для значения +1 для отрицательной области частот между -fe/2 и 0, и для значения -1 для положительной области частот, между 0 и fe/2, где fe - эталонная частота (sign - знаковая функция). Обратное преобразование Фурье применяется для функции j·sign(-f)(R(f)(S*(f), чтобы получить преобразование Хилберта
может осуществляться через быстрое преобразование Фурье (FFT), как будет пояснено ниже. Начинают с расчета R(f) и S(f), осуществляют преобразования Фурье, соответствующие r(n) и s(n). Далее последовательно изменяют S(f), чтобы получить S*(f), и умножают ее на R(f). Затем результат R(f)(S*(f) умножается в области частот на j·sign(-f) при j2=-1 и sign(-f) функции для значения +1 для отрицательной области частот между -fe/2 и 0, и для значения -1 для положительной области частот, между 0 и fe/2, где fe - эталонная частота (sign - знаковая функция). Обратное преобразование Фурье применяется для функции j·sign(-f)(R(f)(S*(f), чтобы получить преобразование Хилберта  .
.
Оценка нулевого шума преобразования Хилберта может быть получена для ограниченного временного интервала через максимальное и минимальное значения  при сравнении обозначений двух последовательных точек, начиная с максимального или минимального значения.
при сравнении обозначений двух последовательных точек, начиная с максимального или минимального значения.
На втором этапе можно также прибегнуть к более тонкому методу поиска нуля для преобразования Хилберта, используя интерполяцию, например интерполяцию четырех точек вокруг нуля, определенного ранее, записанных в виде последовательности Ai(Xi,yi), где i изменяется от 1 до 4. Лучше выбирать две точки, расположенные выше нуля, и две точки, расположенные ниже нуля. Интерполяция полиномом третьего порядка, проводящаяся во всех четырех точках, дает хорошие результаты и представляет собой приемлемый компромисс между сложностью и быстротой расчета функции интерполяции. Для полиномной интерполяции можно использовать полином интерполяции Лагранжа, который имеет вид:
или нормализованную версию данного или другого полинома интерполяции. Искомое запаздывание DT является корнем данного полинома, то есть действительное значение t0, для которого g(t0)=0. Полином третьего порядка может иметь три действительных корня, которые можно получить аналитическим путем, исходя из коэффициентов нормализованного полинома, и в этом случае из этих трех решений выбирают то, которое рассчитано ранее и находится между минимумом и максимумом преобразования Хилберта  .
.
Этот способ позволяет получить при измерении DT очень высокую точность шага шаблонирования. Для величин отношения сигнал/шум для полученных сигналов порядка 50 дБ, стандартный сдвиг при измерении смещения во времени в 0,2 нc может быть получен традиционным способом при шаге установки эталона сигналов 50 мс.
В изобретении предлагается для достижения требуемой величины корреляции между сигналами, чтобы сигналы, полученные каждым датчиком, были как можно более идентичными. Для этого предлагается одновременно возбуждать оба датчика одной хорды измерения и затем одновременно проводить замеры сигналов, полученных каждым датчиком, поступающих от другого датчика. Это является преимуществом, поскольку позволяет осуществить замер за более короткий промежуток времени, поскольку замеры временных интервалов перемещения сигнала от одного датчика к другому на одной хорде измерений происходит одновременно.
Изобретение позволяет существенно ограничить влияние изменений, вызываемых перемещением потока. В известных системах перемещение потока могло изменяться между последовательными замерами при прохождении в прямом и обратном направлениях. Согласно данному изобретению, наоборот, замеры производятся строго одновременно, чтобы движение потока рассматривать как квазистационарное в течение времени измерения. Другими словами, волны, поступающие от датчика 1 к датчику 2 и обратно, пересекают поток при одних и тех же состояниях турбулентности.
Полученные сигналы можно затем обрабатывать. В данном изобретении предлагается для этого нумеровать полученные сигналы таким образом, чтобы можно было провести более точную обработку сигналов. Этот способ менее дорогостоящий и позволяет избежать проблем, связанных с отклонением сигнала и проверками, присущими аналоговым электронным устройствам, а также проводить затем необходимый расчет, благодаря использованию встроенного микропроцессора в системе измерения параметров потока. В диапазоне ультразвуковых частот, используемых для дебитметров, принятом от нескольких сотен кГц до нескольких МГц с временем шаблонирования от 50 нc до 500 нc можно обеспечить полное описание полученных сигналов.
На фиг.2 приведена принципиальная схема цепи воздействия для устройства измерения параметров перемещения потока посредством ультразвуковых сигналов согласно изобретению. Это соответствует наиболее простому варианту устройства, где используется только одна хорда, то есть два датчика. Цепь содержит соединительные клеммы 10, 11, предназначенные для соединения датчиков 12, 13. Эти клеммы соединены посредством коммутатора 15 в цепи коммутации сигналов.
В то же время, цепь с коммутатором 15 сигналов связана со средствами одновременного возбуждения двух датчиков. Данные средства включают единую цепь эмиттера, которая может осуществлять синхронное возбуждение обоих датчиков, тогда как средства коммутации соединяют цепь эмиттера с соединительными зажимами датчиков. Средства коммутации позволяют цепи эмиттера параллельно воздействовать на оба датчика, чтобы форма возбуждающих волн, принимаемых каждым датчиком, были синхронными и идентичными. Цепь соединена также со средствами синхронного измерения сигналов, полученных каждым датчиком. Эти средства измерения включают два маршрута 17, 18 измерения, соответственно для каждого из датчиков. Каждый маршрут 17, 18 измерения содержит усилитель 19, 20, выход которого соединен с аналогo-цифровым преобразователем 21, 22. Усилители 19, 20 максимально идентичны в плане выбора и группировки в пары составляющих, включая печатную плату средства электронного регулирования, чтобы не индуцировать никакого запаздывания или искажения полученных сигналов. Выход каждого аналого-цифрового преобразователя соединен с цепью 23 расчета, например, в виде микропроцессора.
Таким образом, цепь позволяет синхронно и идентично возбуждать датчики, когда коммутационные средства соединяют эти датчики с устройствами для возбуждения. После того, как датчики приведены в возбужденное состояние, средства коммутации соединяют их с измерительными устройствами, чтобы синхронно измерять сигналы, полученные каждым из датчиков от другого датчика. Принцип взаимодействия, применяемый к пьезоэлектрическим датчикам, обеспечивает схожесть сигналов, полученных каждым датчиком, что полученные сигналы различались только временем прохождения.
Изобретение может быть использовано во всех типах измерительных устройств, имеющих датчики, с помощью которых измеряют разницу времени прохождения сигнала между парами датчиков в направлении перемещения и обратно. На фиг.3 и 4 представлены продольный разрез и поперечный разрез устройства измерения. Устройство содержит шесть датчиков с 31 по 36, образующих две группы по три датчика в каждой, расположенных на расстоянии друг от друга вдоль трубопровода 30. Датчики каждой группы равномерно распределены по поверхности трубопровода. Датчики одной из групп представляют диаграмму излучения, которая охватывает по меньшей мере два датчика другой группы. Таким образом, диаграмма излучения датчика 31 первой группы взаимодействует с датчиками 35 и 36 второй группы, то есть с комплектом датчиков второй группы за исключением датчика 34, который расположен на той же образующей. Устройство позволяет вырабатывать с помощью шести датчиков шесть хорд измерений.
Предусмотрена цепь средств синхронного и идентичного возбуждения двух датчиков, а также средств синхронного измерения сигналов, полученных двумя датчиками. Цепь включает средства коммутации для последовательной связи средств возбуждения и средств для измерения на клеммах двух датчиков, выбранных из шести, имеющихся в устройстве.
Измерение может осуществляться следующим образом.
Одновременно измеряют T16 и T61, соединяя датчики 31 и 36 со средствами возбуждения.
Одновременно измеряют T15 и T51, соединяя датчики 31 и 35 со средствами возбуждения.
Одновременно измеряют Т24 и Т42, соединяя датчики 32 и 34 со средствами возбуждения.
Одновременно измеряют Т26 и Т62, соединяя датчики 32 и 36 со средствами возбуждения.
Одновременно измеряют Т34 и T43, соединяя датчики 33 и 34 со средствами возбуждения.
Одновременно измеряют Т35 и Т53, соединяя датчики 33 и 35 со средствами возбуждения.
Обозначают Tij время прохождения сигнала между датчиками 3i и 3j, 1≤i, j≤6.
Можно таким образом рассчитать при минимальном отрезке времени величину скорости или интенсивности потока на всех шести хордах. Средняя из этих величин показывает данные измерения скорости или интенсивности быстрее, точнее и надежнее, чем известные до сих пор устройства.
Таким образом, изобретение применимо к любому устройству ультразвукового измерителя параметров потока с множеством датчиков, установленных на выбранных позициях на стенках трубопровода, по которому перемещается поток, параметры которого требуется измерить. Трубопровод может быть любого типа, размера и из любого материала, применяющегося на практике. Датчики могут быть установлены на стенках известным образом. Предлагается также устанавливать эталон времени распространения ультразвуковых сигналов за пределами стенок трубопровода, как показано ниже. В рамках классического монтажа устройства с временными интервалами прохождения сигнала интервалы T1 и Т2 равны, поскольку обе волны проходят один и тот же путь в противоположных направлениях. Измерение (T1+T2)/2 может осуществляться при последовательном заполнении измерительного шланга, оснащенного датчиками, двумя чистыми жидкостями с контролируемой температурой, разными скоростями и известными высоким давлением, например, вода и этиловый спирт. Измерения временных интервалов прохождения осуществляются для каждой пары датчиков в каждой среде. Таким образом получают линейную систему из двух уравнений с двумя неизвестными T1+T2 и L. Решение этой системы позволяет сохранить в соответствующей памяти точные значения T1 и L для использования их в формуле (4) в рабочей ситуации.
Изобретение предлагает также, что данные значения могут изменяться в зависимости от температуры так, что будут влиять на результаты измерений, компенсировать значения в зависимости от температуры. Для этого случая в устройстве измерения предусмотрен температурный датчик, и корректируются величины временных интервалов прохождения сигнала в зависимости от температуры. Очевидно, что в этом случае температурный датчик может быть помещен в любую часть устройства измерения или рядом с ним, чтобы измерять температуру потока.
Устройство соответствует требованиям, определенным потенциальными условиями использования оборудования, какой бы не была при этом рассматриваемая среда и конечный результат измерения параметров потока. В частности, оно позволяет осуществить повторяемость измерений при стабильном перемещении потока и обеспечивает точность измерения по отношению к международным стандартам. Оно имеет также очень низкую чувствительность к динамическим условиям прохождения потока (гидравлические условия на участке, расположенном выше системы измерений, изменение числа Рейнольдса...), так же как и по отношению к термодинамическим характеристикам потока и внешней окружающей среде оборудования (давление, температура, влажность...). Система с использованием ультразвуковых сигналов, описанная в настоящем изобретении, дает возможность осуществить измерение параметров потока с большей точностью, чувствительностью по отношению к случайным флюктуациям скорости, связанным с турбулентностью и возрастанием скорости. Устройство позволяет ограничить системы путем сокращения количества датчиков и внедрения цифровых электронных приборов, а также снизить стоимость технического обслуживания при эксплуатации.
Изобретения относятся к области измерительной техники и могут быть использованы при измерениях параметров потока. Одним средством возбуждения одновременно возбуждают два датчика, расположенных в трубопроводе. Затем одновременно измеряют ультразвуковые сигналы, полученные каждым датчиком от другого датчика. Осуществляют синхронное преобразование полученных сигналов в цифровую форму для расчета в микропроцессоре разности времен прохождения ультразвуковых сигналов между двумя датчиками в прямом и обратном направлениях. При расчете определяют функцию взаимной корреляции сигналов датчиков. Изобретения позволяют измерять параметры потока с высокой точностью, в реальном масштабе времени, сократить количество датчиков. 3 с. и 8 з.п. ф-лы, 4 ил.
| US 3738169 А, 12.06.1973.US 4162630 А, 31.07.1979.US 5440936 А, 15.08.1995.SU 788001 А, 15.12.1980.SU 1500837 А1, 15.08.1989.GB 1398381 А, 18.06.1975. |

