Настоящее изобретение относится к способам измерения скорости текучих сред в трубопроводах с помощью определения времени распространения в текучих средах, например, акустических сигналов, и может быть использовано, в частности, в ультразвуковых расходомерах для расчета количества прошедшей через расходомер жидкой среды.
Для измерения скорости текучей среды в трубопроводе при использовании в качестве зондирующих сигналов ультразвука необходимо с высокой точностью определить положения характерных точек ультразвукового сигнала, ускоренного или замедленного потоком жидкой среды.
Широко известным подходом является способ, в котором начиная с момента начала ожидания принимаемого сигнала происходит преобразование аналогового сигнала в последовательность цифровых отсчетов определенной частотой дискретизации с последующей интерполяцией в требуемое количество раз и вычислением корреляционной функции полученного массива цифровых отсчетов (принятого сигнала) с массивом, содержащим образец сигнала (с эталонным сигналом). По положению максимального значения корреляционной функции определяется положение сигнала в интерполированном массиве и рассчитывается время распространения ультразвукового сигнала между двумя пространственно разнесенными в направлении потока текучей среды точками.
Следует также отметить, что вычисление корреляционной функции требует длительной обработки большого объема данных, что особенно существенно в условиях применения вычислительных устройств с ограниченной производительностью (микроконтроллеров, микропроцессоров и т.д.), и делает актуальным обеспечение достаточно высокого быстродействия применяемых при этом способов.
Известен способ измерения скорости текучей среды в трубопроводе путем расчета времени распространения ультразвукового сигнала между двумя точками, пространственно разнесенными в направлении потока текучей среды, в котором формируют ультразвуковой сигнал (передаваемый одним датчиком и принимаемый другим датчиком) и эталонный акустический сигнал, осуществляют преобразование упомянутых сигналов в цифровую форму, вычисляют корреляционную функцию принятого и эталонного сигналов, формируют в принятом сигнале последовательность измерительных временных окон с монотонно убывающей временной протяженностью, определяя и уточняя при этом на каждом шаге положение точки пересечения нулевой линии, соответствующей временному сдвигу между известным эталонным сигналом и принятым сигналом и связанной с временным положением максимума корреляционной функции, и рассчитывают время прохождения принятого ультразвукового сигнала с разрешением, определяемым частотой дискретизации. Поскольку частота дискретизации сигнала по мере его сканирования на каждом шаге в окне все меньшего и меньшего размера увеличивается, временной сдвиг между принятым и эталонным сигналом может быть определен на заключительном шаге с высокой точностью. Пошаговое уменьшение размера измерительного временного окна на основе примерной оценки положения принятого сигнала на предыдущем шаге позволяет существенно уменьшить протяженность окна и, соответственно, требования к объему данных, содержащихся в памяти устройства, осуществляющего процесс измерения. Как следствие, повышается быстродействие способа измерения скорости текучей среды в трубопроводе (патент ЕПВ №797105, МПК G01S 15/10, 1997 г.)
Недостатком известного способа является недостаточное быстродействие, связанное с тем, что алгоритмы корреляции требуют существенно больших вычислительных ресурсов по сравнению с алгоритмами интерполяции. В известном способе последовательность  окон формируется в принятом сигнале, в каждом окне происходит увеличение количества точек (интерполяция), и для каждого временного окна применяются алгоритмы корреляции. Как следствие, в рамках одних и тех же аппаратных вычислительных средств это приводит к снижению быстродействия способа.
окон формируется в принятом сигнале, в каждом окне происходит увеличение количества точек (интерполяция), и для каждого временного окна применяются алгоритмы корреляции. Как следствие, в рамках одних и тех же аппаратных вычислительных средств это приводит к снижению быстродействия способа.
Известен способ акустического измерения расхода текучих сред, в котором используется взаимная корреляция сигналов, распространяющихся по потоку и против потока (патент РФ №2234682, МПК G01F 1/66, 2009 г.). Такой подход накладывает ограничения на уровень и качество сигнала, приводит к дополнительным затратам на обработку как входного массива, так выходного массива корреляционной функции, снижая быстродействие способа. Кроме того, усложняется аппаратная реализация способа, так как в этом случае требуется использовать два независимых и синхронно работающих канала аналого-цифрового преобразования
Известен способ измерения текучей среды в трубопроводе по патенту РФ №2696823, МПК G01F 1/66, 2019 г., в котором используется принцип корреляции сигналов с изменяемым, искусственно созданным запаздыванием и поиск максимума между полученными результатами корреляций. Недостатком известного способа является то, что для обеспечения требуемой точности измерения требуется посылка нескольких зондирующих ультразвуковых сигналов (причем точность измерения будет тем выше, чем больше число зондирующих сигналов), а также определение корреляции для каждого из них, что, в конечном итоге, существенно снижает быстродействие способа. Кроме того, применение указанного способа требует значительных вычислительных ресурсов.
В качестве ближайшего технического решения к заявляемому способу выбран способ измерения скорости потока в ультразвуковом расходомере, описанный в патенте США №10753777, МПК G01F 1/66, 2020 г.
Указанный способ заключается в следующем. На первом этапе вычисляется первая корреляционная функция измеряемого сигнала с первым эталонным (опорным) сигналом и по временному сдвигу между измеряемым сигналом и первым опорным сигналом производится грубая оценка времени распространения ультразвукового сигнала. Для более точного определения времени распространения ультразвукового сигнала рассчитывается вторая корреляционная функция между измеряемым сигналом и вторым опорным сигналом, который может являться фрагментом первого опорного сигнала, например, «вырезанным» в соответствующем временном окне.
Опорные сигналы могут быть получены на стадии калибровки прибора или в процессе его работы.
Для выбора опорных точек во второй корреляционной функции используются опорные точки из первой корреляционной функции, причем указанная процедура может осуществляться с помощью установления во второй корреляционной функции  окна.
окна.
На базе нахождения во второй корреляционной функции  положения локального экстремума рассчитывается время распространения ультразвукового сигнала. Ограничение количества значений корреляционной функции при использовании окна, имеющего существенно меньшую протяженность по сравнению с общей протяженностью корреляционной функции, сокращает время расчетов, т.е. повышает быстродействие способа.
положения локального экстремума рассчитывается время распространения ультразвукового сигнала. Ограничение количества значений корреляционной функции при использовании окна, имеющего существенно меньшую протяженность по сравнению с общей протяженностью корреляционной функции, сокращает время расчетов, т.е. повышает быстродействие способа.
Недостатком способа, принятого в качестве ближайшего аналога, является необходимость вычисления нескольких корреляционных функций для уточнения  положения локального экстремума, что снижает быстродействие способа. Кроме этого, при использовании для вычислений нескольких циклов зондирования, снижается точность измерений за счет использования при вычислениях данных, которые существенно изменяются при изменении скорости распространения ультразвуковых колебаний в разных циклах зондирования (например, при резком изменении температуры), затрудняется точная идентификация реального максимума корреляционной функции в ограниченном временном окне, определенном на предыдущих этапах измерений, т.е. возникает вероятность «потери» упомянутого максимума.
положения локального экстремума, что снижает быстродействие способа. Кроме этого, при использовании для вычислений нескольких циклов зондирования, снижается точность измерений за счет использования при вычислениях данных, которые существенно изменяются при изменении скорости распространения ультразвуковых колебаний в разных циклах зондирования (например, при резком изменении температуры), затрудняется точная идентификация реального максимума корреляционной функции в ограниченном временном окне, определенном на предыдущих этапах измерений, т.е. возникает вероятность «потери» упомянутого максимума.
Технический результат, достигаемый при использовании изобретения - повышение быстродействия способа при обеспечении высокой точности измерения скорости текучей среды в трубопроводе.
Указанный технический результат достигается тем, что в способе измерения скорости текучей среды в трубопроводе, включающем формирование зондирующего ультразвукового сигнала, испущенного в первой точке трубопровода, преобразование ультразвукового сигнала, принятого во второй точке трубопровода, пространственно разнесенной от первой точки в направлении потока текучей среды, в цифровую форму, использование корреляционной процедуры сравнения принятого и эталонного сигналов для определения времени распространения ультразвукового сигнала между первой и второй точками трубопровода, и последующий расчет скорости текучей среды в трубопроводе, корреляционную процедуру сравнения принятого и эталонного сигналов осуществляют путем формирования корреляционной функции Ψ принятого и эталонного сигналов с последующим созданием в корреляционной функции Ψ последовательности N временных окон с монотонно убывающими временными протяженностями, при этом выбирают первое временное окно в окрестности точки локального максимума корреляционной функции; осуществляют интерполяцию отсчетов корреляционной функции в первом окне с получением уточненного значения  положения локального максимума корреляционной функции в данном окне, повторяют указанную процедуру для последующих k окон, где N≥k>1, причем каждое окно с номером k формируется в окрестности уточненного
положения локального максимума корреляционной функции в данном окне, повторяют указанную процедуру для последующих k окон, где N≥k>1, причем каждое окно с номером k формируется в окрестности уточненного  положения локального максимума корреляционной функции в предыдущем (k-1) окне, находят
положения локального максимума корреляционной функции в предыдущем (k-1) окне, находят  положение максимума корреляционной функции Ψmax, равное
положение максимума корреляционной функции Ψmax, равное  положению локального максимума корреляционной функции в N-ом окне, и используют найденное значение
положению локального максимума корреляционной функции в N-ом окне, и используют найденное значение  положения максимума корреляционной функции Ψмах для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода.
положения максимума корреляционной функции Ψмах для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода.
Указанный технический результат достигается также тем, что  протяженность первого окна в корреляционной функции T1 выбирают из условия: T1≤0,25Т, где Т -
протяженность первого окна в корреляционной функции T1 выбирают из условия: T1≤0,25Т, где Т -  протяженность корреляционной функции Ψ.
протяженность корреляционной функции Ψ.
Указанный технический результат достигается также тем, что количество  окон N выбирается в диапазоне (2-5).
окон N выбирается в диапазоне (2-5).
Указанный технический результат достигается также тем, что в качестве принятого и эталонного сигналов используют ультразвуковые сигналы, распространяющиеся по потоку.
Указанный технический результат достигается также тем, что в качестве принятого и эталонного сигналов используют ультразвуковые сигналы, распространяющиеся против потока.
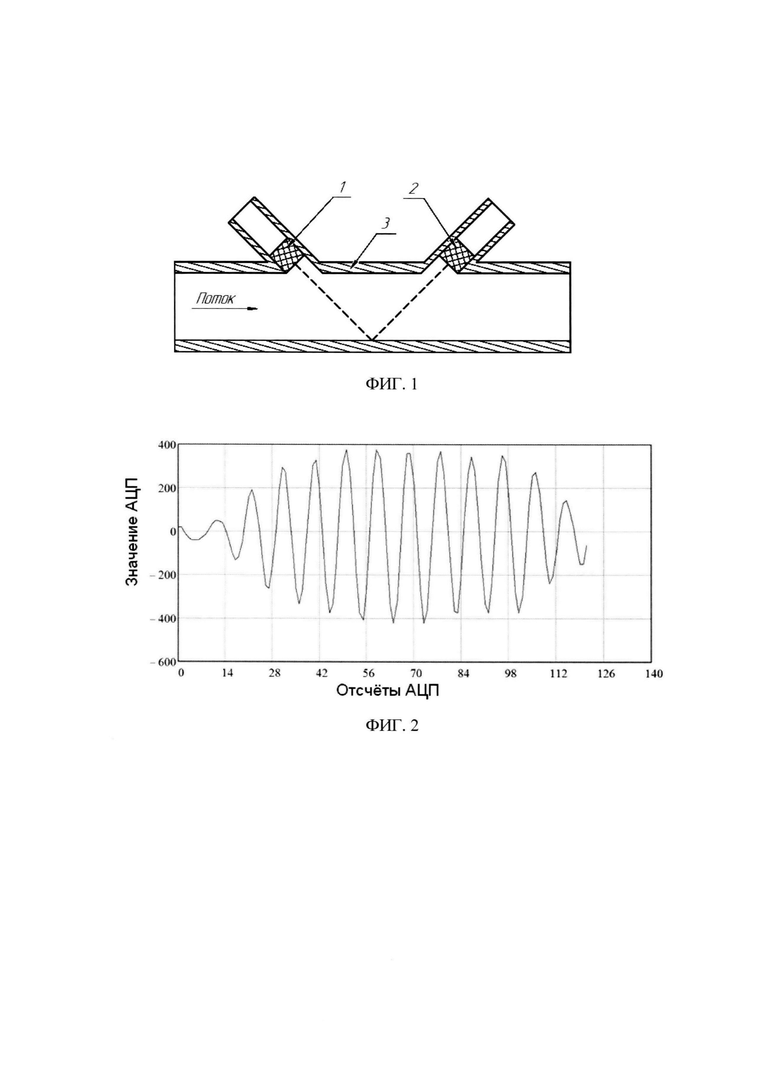
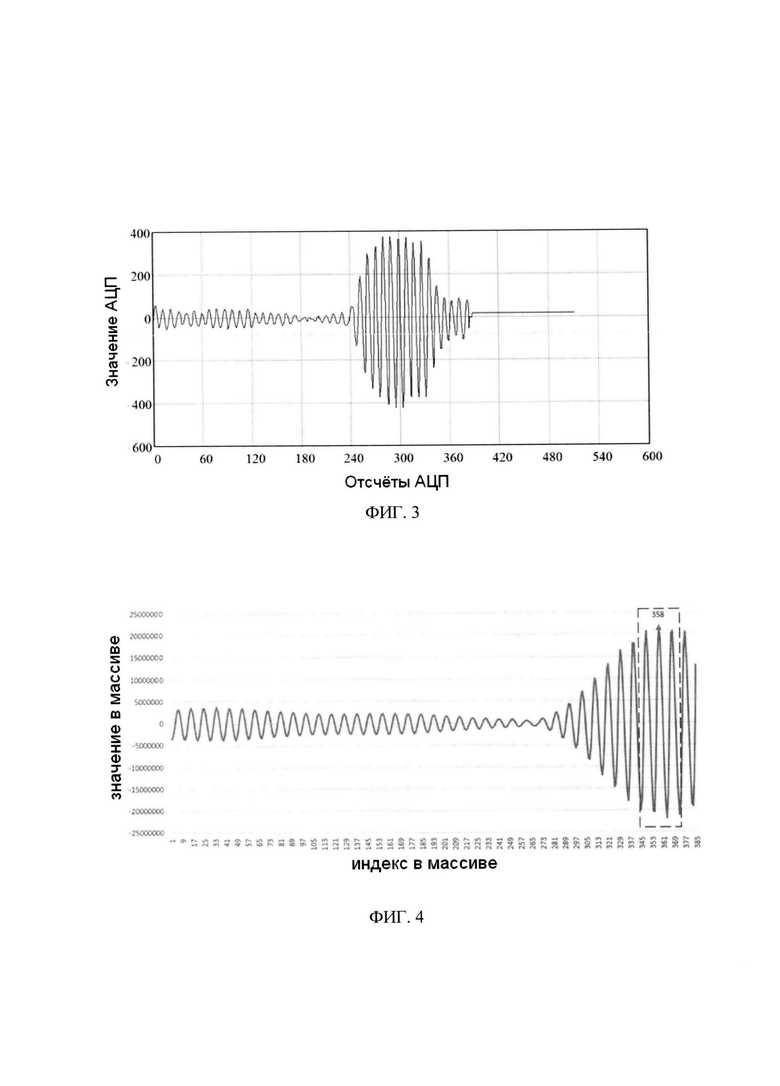
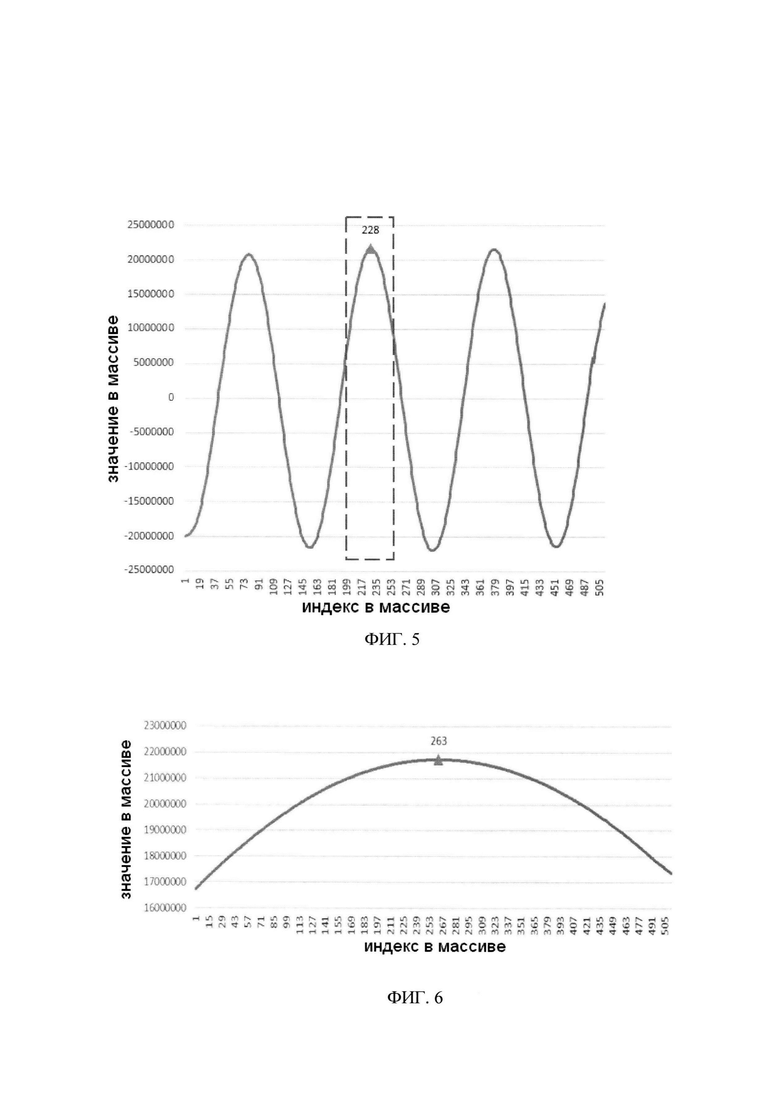
Изобретение иллюстрируется чертежами. На фиг. 1 схематически показан принцип измерения скорости распространения ультразвукового сигнала в текучей среде, на фиг. 2 приведена эпюра эталонного сигнала, на фиг. 3 показана эпюра оцифрованного принятого сигнала, зарегистрированного приемопередатчиком 2, на фиг. 4 приведена эпюра корреляционной функции принятого и эталонного сигналов с наложенным на нее первым временным окном и точкой локального максимума, на фиг. 5 иллюстрируется нахождение уточненного максимума корреляционной функции после первой интерполяции, на фиг. 6 показан максимум корреляционной функции Ψmax, определенный на заключительном этапе интерполяционной процедуры в N-ом окне.
Заявляемый способ реализуется следующим образом. Приемопередатчик 2 регистрирует ультразвуковой сигнал (принятый сигнал), испущенный приемопередатчиком 1 с частотой ультразвуковых колебаний F0 и распространяющийся по трубопроводу 3, например, в направлении протекания текучей среды (по потоку). Затем принятый сигнал оцифровывается (фиг. 3) с частотой более 2⋅F0. Частота дискретизации F0 ограничена аппаратными средствами (АЦП) и недостаточна для определения  положения принятого сигнала с требуемой точностью. На следующем этапе вычисляется корреляционная функция принятого и эталонного сигналов (фиг. 4). Эталонный сигнал (фиг. 2) может быть получен на этапе калибровки или рассчитан теоретическим путем.
положения принятого сигнала с требуемой точностью. На следующем этапе вычисляется корреляционная функция принятого и эталонного сигналов (фиг. 4). Эталонный сигнал (фиг. 2) может быть получен на этапе калибровки или рассчитан теоретическим путем.
Частота дискретизации (дискретность) корреляционной функции недостаточна для определения  положения принятого сигнала с требуемой точностью. Как видно из фиг. 4, корреляционная функция Ψ имеет гармоническую форму без ярко выраженного максимума, что при недостаточной частоте дискретизации может привести к ошибке при выборе полуволны функции с максимальной амплитудой. Для повышения точности определения
положения принятого сигнала с требуемой точностью. Как видно из фиг. 4, корреляционная функция Ψ имеет гармоническую форму без ярко выраженного максимума, что при недостаточной частоте дискретизации может привести к ошибке при выборе полуволны функции с максимальной амплитудой. Для повышения точности определения  положения принятого сигнала проводят интерполяцию корреляционной функции с формированием последовательности N временных окон с монотонно убывающей временной протяженностью. Теоретически количество окон не ограничено, но, как установил заявитель, для обеспечения высокого быстродействия при невысоких аппаратных затратах достаточно использовать от 2-х до 5-и окон.
положения принятого сигнала проводят интерполяцию корреляционной функции с формированием последовательности N временных окон с монотонно убывающей временной протяженностью. Теоретически количество окон не ограничено, но, как установил заявитель, для обеспечения высокого быстродействия при невысоких аппаратных затратах достаточно использовать от 2-х до 5-и окон.
На начальном этапе обработки данных в корреляционной функции Ψ формируется первое временное окно T1 (показано в виде пунктирной рамки на фиг. 4) в окрестности точки локального максимума корреляционной функции в данном окне (или, говоря иначе, выбирается массив данных, находящихся в окрестностях такой точки).
Временную протяженность первого окна T1 выбирают из условия: T1≤0,25Т, где Т - временная протяженность корреляционной функции Ψ. На с следующем этапе осуществляется интерполяция корреляционной функции в окрестности локального максимума в данном окне с уточнением временного положения локального максимума.
В предпочтительном варианте реализации способа Т1 содержит в себе 3-5 локальных максимумов, соседних с найденным максимумом корреляционной функции в первом окне. Тогда интерполяция производится с захватом одного-двух локальных максимумов до и одного-двух - после найденной точки локального максимума, соответствующим 3-5 периодам.
На фиг. 5 приведена корреляционная функция с уточненным на данном этапе после первой интерполяции временным положением локального максимума.
Далее осуществляют формирование в корреляционной функции последовательности k окон с монотонно убывающей временной протяженностью Tk, где N≥k>1, а Tk<Tk-1, причем каждое k-ое окно формируется в окрестности уточненного значения  положения максимума корреляционной функции в предыдущем (k-1) окне, определяют уточненное значение временного положения максимума в данном окне и осуществляют интерполяцию корреляционной функции в окрестности упомянутого временного положения.
положения максимума корреляционной функции в предыдущем (k-1) окне, определяют уточненное значение временного положения максимума в данном окне и осуществляют интерполяцию корреляционной функции в окрестности упомянутого временного положения.  положение локального максимума корреляционной функции, найденное на N-ом этапе (в N-ом окне) - фиг. 6 - после уточнения его значения и интерполяции, полагают равному искомому
положение локального максимума корреляционной функции, найденное на N-ом этапе (в N-ом окне) - фиг. 6 - после уточнения его значения и интерполяции, полагают равному искомому  положению максимума корреляционной функции Ψmax.
положению максимума корреляционной функции Ψmax.
Найденное значение  положения Ψmax используют для определения времени распространения ультразвукового сигнала между двумя пространственное разнесенными в направлении потока текучей среды точками. Скорость текучей среды в трубопроводе вычисляется в зависимости от проекции траектории распространения ультразвуковых колебаний на ось потока жидкости и разницы времен распространения сигнала между приемником и передатчиком по потоку и против потока.
положения Ψmax используют для определения времени распространения ультразвукового сигнала между двумя пространственное разнесенными в направлении потока текучей среды точками. Скорость текучей среды в трубопроводе вычисляется в зависимости от проекции траектории распространения ультразвуковых колебаний на ось потока жидкости и разницы времен распространения сигнала между приемником и передатчиком по потоку и против потока.
Заявляемый способ позволяет определять время прохождения ультразвукового сигнала в текучей среде с точностью до десятков пикосекунд. Он свободен от сделанного в ближайшем аналоге допущения о соотношении между скоростью текучей среды и скоростью распространения в текучей среде ультразвука с одной стороны, и скоростью очередного этапа зондирования и измерения результатов с другой стороны, и, как следствие, для получения результатов измерений с требуемой точностью при использовании предлагаемого способа не требуется большого числа циклов измерения. Способ позволяет определить точное время прохождения сигнала за одну итерацию зондирования (один цикл зондирования, оцифровки и обработки данных), что позволяет быстро реагировать на изменение скорости потока среды.
Предлагаемый способ позволяет примерно в 32 раза сократить время обработки сигнала при работе с массивами исходных данных объемом 512 отсчетов и образца сигнала объемом 256 отсчетов при увеличении условной интерполяции в 1024 раза, и существенно увеличить быстродействие процесса измерения скорости текучей среды в трубопроводе. Он также позволяет использовать аппаратные средства, необходимые для реализации способа, с ограниченными ресурсами памяти, с небольшой вычислительной мощностью и с аналого-цифровым преобразователем с достаточно малой частотой дискретизации, например, превышающей частоту зондирующего сигнала всего в 6-8 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВОДИМАЯ ПО АВТОКОРРЕЛЯЦИИ ВЗАИМНАЯ КОРРЕЛЯЦИЯ В УЛЬТРАЗВУКОВОЙ ЭЛАСТОГРАФИИ СДВИГОВОЙ ВОЛНЫ | 2015 |
|
RU2689174C2 |
| ДАТЧИК, СИСТЕМА И СПОСОБ ДЛЯ ИЗМЕРЕНИЯ И РАЗЛИВОЧНАЯ МАШИНА | 2021 |
|
RU2834106C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ТЕЛЕВИЗИОННОМУ ИЗОБРАЖЕНИЮ | 1999 |
|
RU2189701C2 |
| МЕТОД ПАССИВНОГО АКУСТИЧЕСКОГО МОНИТОРИНГА ПРИДОННЫХ ГАЗОЖИДКОСТНЫХ ПОТОКОВ | 2013 |
|
RU2521717C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476986C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ВОЛН ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ ПО ТРУБОПРОВОДУ | 2010 |
|
RU2476763C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483319C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2476985C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА В ТРУБОПРОВОДЕ, УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА И КОНТУР ВОЗБУЖДЕНИЯ ДЛЯ УСТРОЙСТВА | 1999 |
|
RU2234682C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕНИ ПРИХОДА СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2483318C2 |
Способ измерения скорости текучей среды в трубопроводе включает формирование зондирующего ультразвукового сигнала, испущенного в первой точке трубопровода, преобразование ультразвукового сигнала, принятого во второй точке трубопровода, в цифровую форму, формирование корреляционной функции Ψ принятого и эталонного сигналов с последующим созданием в корреляционной функции Ψ последовательности N временных окон с монотонно убывающими временными протяженностями, нахождение в каждом окне 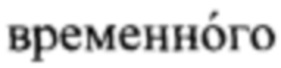 положения максимума корреляционной функции, определение искомого максимума корреляционной функции Ψmах по величине положения локального максимума корреляционной функции в N-м окне, использование Ψmax для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода с последующим расчетом скорости текучей среды в трубопроводе. Обеспечивается повышение быстродействия способа при высокой точности измерения скорости текучей среды в трубопроводе. 4 з.п. ф-лы, 6 ил.
положения максимума корреляционной функции, определение искомого максимума корреляционной функции Ψmах по величине положения локального максимума корреляционной функции в N-м окне, использование Ψmax для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода с последующим расчетом скорости текучей среды в трубопроводе. Обеспечивается повышение быстродействия способа при высокой точности измерения скорости текучей среды в трубопроводе. 4 з.п. ф-лы, 6 ил.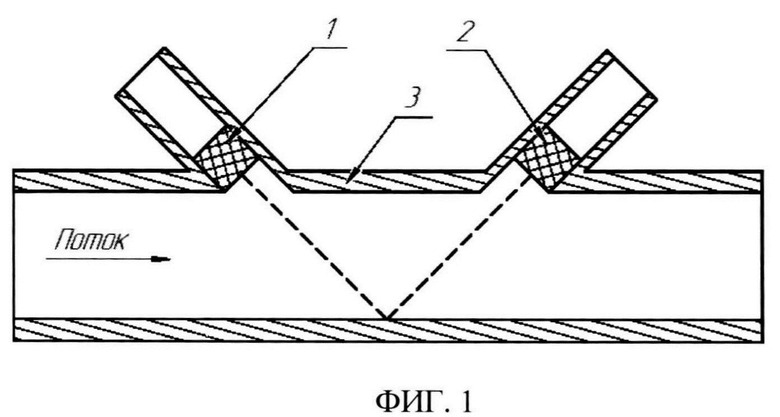
1. Способ измерения скорости текучей среды в трубопроводе, включающий формирование зондирующего ультразвукового сигнала, испущенного в первой точке трубопровода, преобразование ультразвукового сигнала, принятого во второй точке трубопровода, пространственно разнесенной от первой точки в направлении потока текучей среды, в цифровую форму, использование корреляционной процедуры сравнения принятого и эталонного сигналов для определения времени распространения ультразвукового сигнала между первой и второй точками трубопровода и последующий расчет скорости текучей среды в трубопроводе, отличающийся тем, что корреляционную процедуру сравнения принятого и эталонного сигналов осуществляют путем формирования корреляционной функции Ψ принятого и эталонного сигналов с последующим созданием в корреляционной функции Ψ последовательности N временных окон с монотонно убывающими временными протяженностями, при этом выбирают первое временное окно в окрестности точки локального максимума корреляционной функции; осуществляют интерполяцию отсчетов корреляционной функции в первом окне с получением уточненного значения  положения максимума корреляционной функции в данном окне, повторяют указанную процедуру для последующих k окон, где N≥k>1, причем каждое окно с номером k формируется в окрестности уточненного
положения максимума корреляционной функции в данном окне, повторяют указанную процедуру для последующих k окон, где N≥k>1, причем каждое окно с номером k формируется в окрестности уточненного  положения максимума корреляционной функции в предыдущем (k-1) окне, находят
положения максимума корреляционной функции в предыдущем (k-1) окне, находят  положение максимума корреляционной функции Ψmax, равное
положение максимума корреляционной функции Ψmax, равное  положению максимума корреляционной функции в N-м окне, и используют найденное значение
положению максимума корреляционной функции в N-м окне, и используют найденное значение  положения максимума корреляционной функции Ψmax для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода.
положения максимума корреляционной функции Ψmax для определения времени распространения ультразвукового сигнала между двумя упомянутыми точками трубопровода.
2. Способ измерения скорости текучей среды в трубопроводе по п. 1, отличающийся тем, что временную протяженность первого окна T1 выбирают из условия: T1≤0,25Т, где Т - временная протяженность корреляционной функции Ψ.
3. Способ измерения скорости текучей среды в трубопроводе по п. 1, отличающийся тем, что количество временных окон N выбирается в диапазоне (2-5).
4. Способ измерения скорости текучей среды в трубопроводе по п. 1, отличающийся тем, что в качестве принятого и эталонного сигналов используют ультразвуковые сигналы, распространяющиеся по потоку.
5. Способ измерения скорости текучей среды в трубопроводе по п. 1, отличающийся тем, что в качестве принятого и эталонного сигналов используют ультразвуковые сигналы, распространяющиеся против потока.
| US 10753777 B2, 25.08.2020 | |||
| US 7254494 B2, 07.08.2007 | |||
| EP 3705852 A1, 09.09.2020 | |||
| JP 11241934 A, 07.09.1999. |

