Изобретение относится к преобразовательной технике и может быть использовано для повышения энергетических показателей трехфазных регуляторов переменного напряжения.
Выполнение регуляторов переменного напряжения на новой элементной базе в виде запираемых тиристоров GТО или транзисторных ключей типа IGBT, MOSFET позволяет перевести данные устройства в активный режим энергопотребления. Активный регулятор переменного напряжения (АРПН) отличает наличие как минимум двух управляющих входов, один из которых традиционно служит для регулирования выходного напряжения и, соответственно, потребляемой активной мощности, а второй - для одновременного регулирования величины и знака реактивной мощности сетевого входа. Таким образом, наличие второго управляющего входа позволяет данному устройству активно влиять на энергетический режим питающей сети, чем и обусловлено его название. Для перевода регулятора в активный режим необходимо обеспечить в его схеме возможность периодического чередующегося подключения трехфазной нагрузки к двум фазам питающей сети. Для этого могут служить коммутирующие элементы, каждый из которых содержит транзисторный ключ на выходе однофазного диодного моста, зажимами переменного тока соединенного с двумя вторичными обмотками согласующего трансформатора (см. например, Глазенко Т.А. и др. Полупроводниковые системы импульсного асинхронного электропривода малой мощности. Л.: Энергоатомиздат, 1983, с.10-15). Как будет показано, при таком исполнении существует возможность одновременного изменения выходного напряжения, а также величины и знака фазового сдвига ϕ 1 между сетевым напряжением и первой гармоникой потребляемого тока. Для упрощения автоматического регулирования этот процесс должен осуществляться автономно, то есть с помощью двух управляющих сигналов независимо друг от друга по линейному пропорциональному закону. Согласно известному решению (см. патент РФ № 2167484, 2001 г., Бюл.№ 14), подобное регулирование реализуется с помощью задающих сигналов Up* , Uq* , относительные значения которых пропорциональны активной и реактивной составляющим мощности, на основе вертикального принципа путем коммутации транзисторных ключей, в моменты равенства периодически изменяющихся синхронно с сетью опорных сигналов линейно-пилообразной формы и управляющих сигналов Uy1* , Uy2* , значения которых определяют фазовую задержку моментов включения и выключения транзисторов. Управляющие сигналы получают на выходах некого функционального построителя, на входы которого подают упомянутые выше задающие сигналы. Характеристики функционального построителя обеспечивают необходимую для линейного автономного регулирования связь указанных входных и выходных сигналов Uy1*(Up* , Uq* ), Uy2* (Up* , Uq* ), Uy3* (Up). Согласно предлагаемому решению эти выражения должны иметь следующий вид:



Реализация предлагаемого способа управления возможна в двух вариантах. Первый имеет отношение к так называемому компенсационному режиму энергопотребления АРПН, когда требуется одновременное независимое регулирование обеих указанных составляющих мощности сетевого входа. Регулирование активной мощности ведется с помощью управляющего сигнала, относительное значение которого изменяется в пределах U* p=0-1, а регулирование величины и знака реактивной мощности - с помощью управляющего сигнала, изменяющегося по величине и знаку U* q=0-± 0.5, при этом импульсно-фазовое управление осуществляется с однократным включением каждого транзисторного ключа в течение полуволны сетевого напряжения с фазовой задержкой относительно начала полуволны, зависящей от знака реактивной мощности, а именно: в режиме генерирования реактивной мощности при U* q&λτ; 0 фазовая задержка осуществляется при включении с углом  , а при выключении с углом
, а при выключении с углом  ; в режиме потребления реактивной мощности при U* q&γτ; 0 фазовая задержка осуществляется при включении с углом
; в режиме потребления реактивной мощности при U* q&γτ; 0 фазовая задержка осуществляется при включении с углом  , а при выключении с углом
, а при выключении с углом  .
.
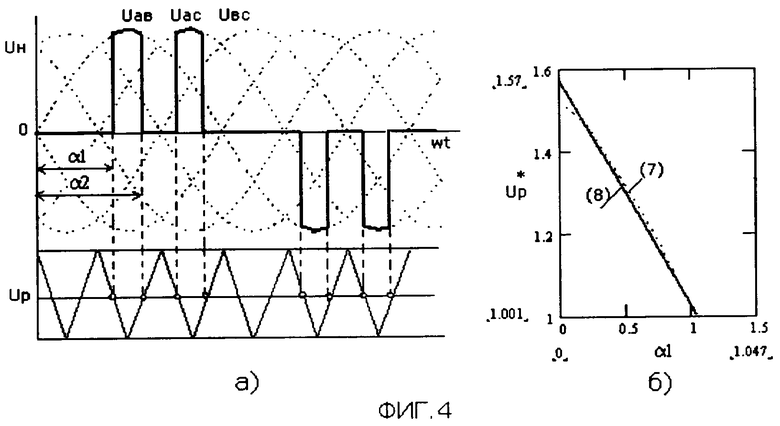
Второй вариант переводит устройство в компенсированный режим энергопотребления, когда регулирование выходного напряжения и потребляемой активной мощности осуществляется с помощью сигнала U* p=0-1 при поддержании нулевого значения реактивной мощности. Данный режим обеспечивается установкой U* q=0 при такой организации импульсно-фазового управления, когда включение каждого транзистора в течение полуволны сетевого напряжения происходит с фазовой задержкой на угол α 1=π /2-0.5Uy* 3, а выключение - с задержкой на угол α 2=π /2+0.5Uy* 3.
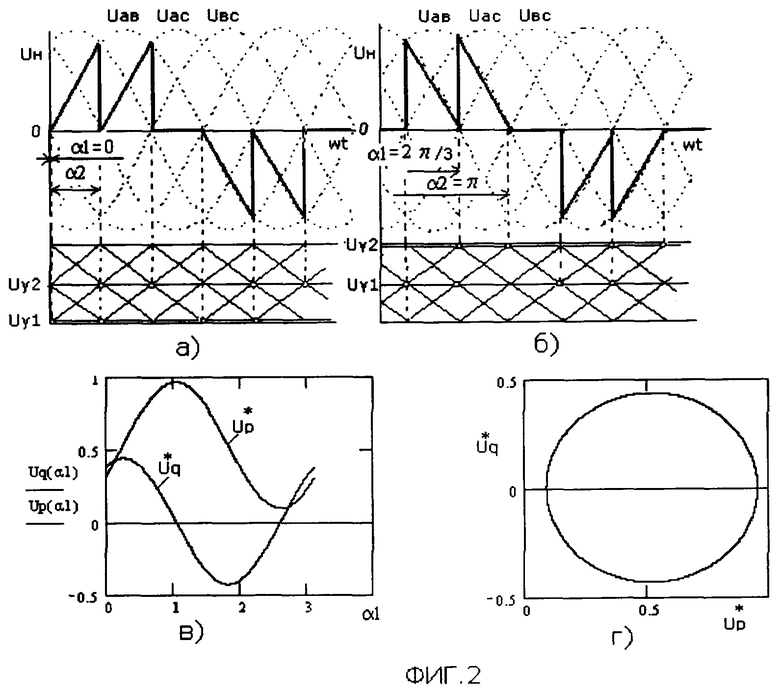
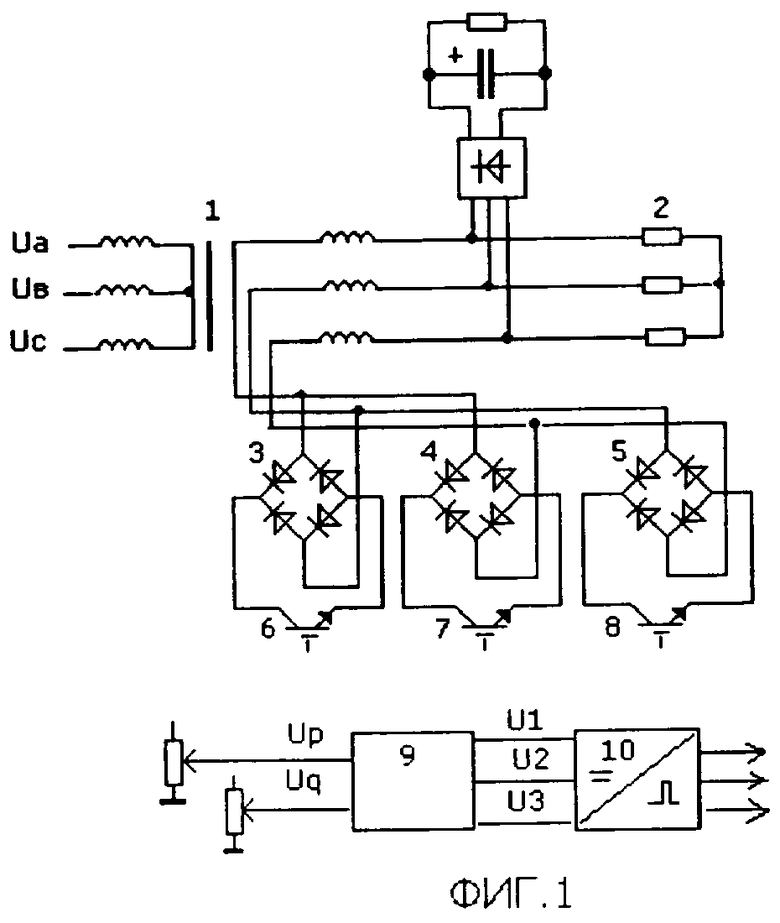
На фиг.1 представлена принципиальная схема силовых цепей и укрупненная блок-схема цепей управления рассматриваемого устройства; на фиг.2 - временные диаграммы напряжений (а, б) и мощностей (в), а также фазовая диаграмма мощностных составляющих (г), иллюстрирующие работу регулятора в компенсационном режиме неавтономного управления с углами α 2=α 1+π /3, на фиг.3 - аналогичные диаграммы, иллюстрирующие работу регулятора в компенсационном режиме автономного управления, реализация которого возможна при углах управления α 2&λτ;α 1+π /3; на фиг.4 - аналогичные диаграммы, иллюстрирующие работу регулятора в компенсированном режиме.
Представленное на фиг.1 устройство содержит 3-фазный согласующий трансформатор 1, к одноименным выводам вторичных обмоток которого подключена нагрузка 2. Формирование импульсного напряжения в нагрузке осуществляется кратковременным попарным объединением других выводов обмоток с помощью коммутирующих элементов. Эти элементы выполнены одинаково с применением однофазных диодных мостов 3, 4, 5, к выходным зажимам которых подключены транзисторные ключи 6, 7, 8. Основными элементами цепей управления служат функциональный построитель 9, на входы которого подаются задающие сигналы Up, Uq, а на выходах получают управляющие сигналы Uy1, Uy2, Uy3, поступающие далее на входы системы импульсно-фазового управления транзисторами 10.
Алгоритм работы состоит в поочередном циклическом переключении транзисторов с двойной по отношению к сети частотой. Регулирование осуществляется импульсно-фазовым способом изменением углов включения α 1 и выключения α 2 транзисторов, замеряемых относительно начала положительных и отрицательных полуволн сетевого линейного напряжения. Замыкание тока нагрузки на интервалах выключенного состояния транзисторов происходит по параллельным нагрузке цепям, содержащим, как видно из фиг.1, вспомогательный диодный мост с подключенным на выходе конденсаторным фильтром и разрядным резистором.
Получим закон автономного пропорционального регулирования мощностных составляющих сетевого входа при допущении синусоидальности питающего напряжения и работы регулятора на нагрузку омического характера. В этом случае, при условии соединения первичных обмоток идеального трансформатора звездой, форма сетевого фазного тока будет совпадать с формой выходного фазного напряжения, показанного на диаграммах фиг.2а, б; 3а, б; 4а. Раскладывая данный ток в ряд Фурье, запишем выражения косинусного и синусного коэффициентов при первом слагаемом тригонометрического ряда в относительной системе координат
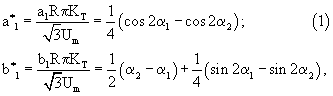
где Um - амплитудное значение линейного напряжения вторичных обмоток трансформатора;
R - фазное омическое сопротивление нагрузки;
КТ - коэффициент трансформации.
Данные соотношения позволяют расчитать действующее значение основной гармоники сетевого тока и фазовый сдвиг этой гармоники

а также активную и реактивную мощности на сетевом входе регулятора

После подстановки (1), (2) в (3) относительные значения активной и реактивной мощностей выразятся

Для осуществления пропорционального регулирования введем понятия задающих сигналов, значения которых равны относительным значениям указанных мощностей Up* =Р* ; U* q=Q* . Таким образом, закон пропорционального управления активным регулятором может быть представлен уравнениями (4). Решение этой системы уравнений относительно углов управления α 1, α 2 обеспечит возможность независимого регулирования Р и Q с помощью двух задающих сигналов в пределах Up* ≤Upг* , Uq* ≤ Uqг* . Граничные значения сигналов можно получить, подставляя в (4) максимальный угол выключения α 2=α1+π /3

Придавая углу включения транзисторов всевозможные значения α 1=0-π , с помощью (5) на фиг.2в построены графики максимальных значений задающих сигналов Upг* (α 1), Uqг* (α 1), а на фиг.2г фазовая тректория этих координат. Работа при указанных задающих сигналах обеспечивает максимальные значения активной и реактивной мощностей, однако регулирование в этом случае будет неавтономным. Автономное (независимое) регулирование данных мощностей возможно при условии α 2&λτ;α 1+π /3.Форма выходного напряжения Uн(t) и графики зависимостей Р* (α 1), Q* (α 1), в данном режиме для случая α 2=α 1+π /6 показаны на фиг.3 в режиме генерирования реактивной мощности при Uq&λτ; 0 (а) и в режиме потребления реактивной мощности при Uq&γτ; 0 (б).
Так как точное решение системы уравнений (4) относительно углов управления в явном виде представляется затруднительным, приближенное решение получено при допущении

в следующем виде:

где Uy1* , Uy2* - управляющие сигналы, значения которых пропорциональны углу включения α 1 и углу выключения α 2 транзистора соответственно. Техническая реализация системы управления может быть осуществлена согласно блок-схеме фиг.1. Задающие сигналы Up, Uq поступают на входы функционального построителя 9, реализующего зависимости (6). На выходах этого блока формируются управляющие сигналы Uy1* , Uy2* , поступающие далее на входы системы импульсно-фазового управления 10. Работа данной системы происходит по так называемому вертикальному принципу. Как показано на диаграммах фиг.2а, фиг.3а, при генерировании реактивной мощности Uq&λτ; 0 формирование передних фронтов отпирающих импульсов происходит в моменты равенства управляющего сигнала U* y1 с линейно возрастающими опорными сигналами пилообразной формы, в результате чего углы включения транзисторов будут определяться зависимостью α 1=U* у1·π/3. Формирование задних фронтов отпирающих импульсов будет происходить в моменты равенства этих же опорных сигналов с управляющим сигналом U* у2, в результате чего углы выключения транзисторов будут равны α 2=U* y2·2π /3. При работе регулятора с потреблением реактивной мощности Uq&γτ; 0 формирование отпирающих импульсов, как показано на фиг.2б, фиг.3б, должно происходить в моменты равенства управляющих сигналов с опорными сигналами убывающей формы, в результате чего углы включения транзисторов будут определяться согласно зависимости α 1=π -U* у2·2π /3, а углы выключения согласно зависимости α 2=π -U* y1·π/3.
Точность отыскания углов управления по (6) снижается по мере уменьшения реактивной мощности Uq→ 0, поэтому для работы в компенсированном режиме при Uq=0 был найден другой алгоритм управления. В этом режиме фазовый сдвиг первой гармоники тока должен быть равен нулю ϕ 1=0, для чего включения и выключения транзисторов должны происходить симметрично относительно вершины полуволны сетевого напряжения, то есть при соотношении α 2=π -α 1. Подставляя данную зависимость в (4), получаем закон регулирования в компенсированном режиме

где α 1=π /3-π /2 - диапазон изменения угла включения.
Методом регрессии с помощью (7) найдена обратная зависимость угла включения от величины задающего сигнала

Результаты расчета зависимостей (7) и (8) на фиг.4б подтверждают их тождественность. Диаграммы на фиг.4а иллюстрируют возможность реализации закона управления (8) с достаточно высокой точностью на основе вертикального принципа с применением опорного сигнала линейно-пилообразной формы. В этом случае углы включения и выключения транзисторов будут определяться в точках пересечения данного периодического сигнала с задающим сигналом U*р=0÷ 1, согласно выражениям
α 1=π /2-0.5U* p;
α 2=π /2+0.5U* p.

Активный регулятор переменного напряжения обеспечивает возможность одновременного независимого регулирования выходного напряжения и потребляемой активной мощности, а также величины и знака реактивной мощности сетевого входа. Выполнен по трехфазной схеме с применением согласующего трансформатора и трех коммутирующих элементов, каждый в виде однофазного диодного моста с подключенным на выходе силовым транзисторным ключом, с помощью которых осуществляется чередующееся подключение с двойной по отношению к сети частотой трехфазной нагрузки к двум вторичным обмоткам трансформатора. Предлагается способ независимого пропорционального регулирования активной и реактивной составляющих мощности сетевого входа, для чего получены математические выражения, связывающие задающие сигналы с управляющими напряжениями на входах системы импульсно-фазового управления. Технический результат - возможность реализации активного режима. 2 з.п. ф-лы, 4 ил.



 , а при выключении с углом
, а при выключении с углом  в режиме потребления реактивной мощности при U*q>0 фазовая задержка осуществляется при включении с углом
в режиме потребления реактивной мощности при U*q>0 фазовая задержка осуществляется при включении с углом  , а при выключении с углом
, а при выключении с углом  .
.| Преобразователь переменного напряжения (его варианты) | 1983 |
|
SU1220086A1 |
| ГЛАЗЕНКО Т.А | |||
| и др | |||
| Полупроводниковые системы импульсного асинхронного электропривода малой мощности | |||
| - Л.: Энегоатомиздат, 1983, с.10-15, рис.1-5, 1-6 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

