Изобретение относится к преобразовательной технике, получающей применение в регулируемом электроприводе переменного тока.
Известен способ фазового управления двухфазным асинхронным электродвигателем, при котором напряжение на обмотке возбуждения остается неизменным, а напряжение обмотки управления при постоянстве амплитуды и частоты изменяется по фазе, что приводит к изменению частоты вращения двигателя в режиме холостого хода в соотношении, пропорциональном синусу фазового рассогласования напряжений на указанных обмотках (см. Брускин Д.Э. и др. "Электрические машины и микромашины." - М.: Высш. школа, 1981, с.193). С целью поддержания к.п.д. на высоком уровне регулирование фазы напряжения в цепях обмотки управления осуществляют импульсно-фазовым способом с помощью транзисторов, работающих в ключевом режиме. Переключения транзисторов искажают форму напряжения в обмотке управления, делая ее несинусоидальной. Основная задача регулирования в этом случае сводится к изменению фазы β 1 основной гармоники этого напряжения с поддержанием постоянства ее амплитуды Uoy1 во всем диапазоне. Наблюдающееся при известных способах импульсно-фазового управления одновременное произвольное изменение фазы и амплитуды основной гармоники делает регулировочные характеристики исполнительного двигателя нелинейными, снижающими точность регулирования с возможной потерей устойчивости. Поэтому основная цель предлагаемых технических решений состоит в поддержании линейности регулировочных характеристик при минимальных изменениях амплитуды основной гармоники напряжения обмотки управления во всем диапазоне регулирования. Близкие технические решения поставленной задачи имеются в ряде литературных источников (см., например, Глазенко Т.А., Хрисанов В.И. "Полупроводниковые системы импульсного асинхронного электропривода малой мощности." - Л.: Энергоатомиздат, 1983, с. 108 или "Электропривод летательных аппаратов." Под ред. В.А.Полковникова. - М.: Машиностроение, 1990, с.200-205). Согласно им, известный способ фазового управления предусматривает регулирование частоты вращения с возможностью изменения ее направления в двигательном режиме, а также регулирование тормозного момента в тормозном режиме путем изменения величины и знака фазы основной гармоники напряжения в цепи обмотки управления двухфазного асинхронного электродвигателя с помощью полупроводникового коммутатора, выполненного по симметричной мостовой схеме на четырех транзисторных ключах с двухсторонней проводимостью тока, одна диагональ которого подключена к источнику питания, а другая - к обмотке управления, в процессе поочередного двукратного за период питающего напряжения переключения каждой пары диагонально расположенных в мостовой схеме транзисторов, из числа которых первая обеспечивает прямое, а вторая пара - инверсное подключение указанной обмотки к источнику питания с углами управления α 1 при каждом первом включении и α 2 при каждом втором включении на периоде, отсчет которых ведется относительно моментов перехода питающего напряжения через нулевое значение, при поддержании равенства суммы модульных значений указанных углов |α 1|+|α 2|=π , в функции знака сигнала задания скорости на управляющем входе устройства импульсно-фазового управления и величины ошибки регулирования, которую получают вычитанием из сигнала задания аналогичного по форме сигнала отрицательной обратной связи по частоте вращения электродвигателя.
В целях регулирования фазы основной гармоники напряжения в обмотке управления с поддержанием в определенных пределах постоянства действующего значения этой гармоники предлагается регулирование частоты вращения двигателя вперед в двигательном режиме при положительных сигналах задания скорости и ошибки регулирования осуществлять изменением фазовых углов включения первой пары с одновременным выключением второй пары транзистров, замеряя эти углы относительно моментов перехода питающего напряжения через нуль в положительную сторону, в диапазоне -π ≤ α 1≤-π /2, 0≤ α 2≤π/2 в то время, как включения второй пары с одновременным выключением первой пары транзисторов осуществлять в каждый момент перехода питающего напряжения через нулевое значение, а в тормозном режиме при положительном сигнале задания и отрицательном знаке ошибки регулирования осуществлять аналогичные переключения транзисторов при регулировании моментов включения первой пары транзисторов в диапазоне -π /2≤ α 1≤0, π /2≤ α 2≤π; в свою очередь, регулирование частоты вращения назад в двигательном режиме при отрицательных сигналах задания скорости и ошибки регулирования осуществлять изменением фазовых углов включения второй пары с одновременным выключением первой пары транзисторов, замеряя эти углы относительно моментов перехода питающего напряжения через нуль в отрицательную сторону, в диапазоне углов -π ≤ α 1≤π/2, 0≤ α 2≤π/2 в то время, как включения первой пары с одновременным выключением второй пары транзисторов осуществлять в каждый момент перехода питающего напряжения через нулевое значение, а в тормозном режиме при отрицательном сигнале задания и положительном знаке ошибки регулирования осуществлять аналогичные переключения транзисторов при регулировании моментов включения второй пары транзисторов в диапазоне -π /2≤ α 1≤0, π /2≤ а2≤π.
Дополнительно для получения линейной характеристики ν 0(Δ ν ), связывающей относительные значения частоты вращения холостого хода двигателя ν 0 и ошибки регулирования Δ ν , на управляющем входе устройства импульсно-фазового управления предлагается установить нелинейный регулятор с характеристикой Uy(Δ ν ), обратной по отношению к регулировочной характеристике электропривода, следующего вида 
где Uy - сигнал, поступающий с выхода нелинейного регулятора на управляющий вход устройства импульсно-фазового управления.
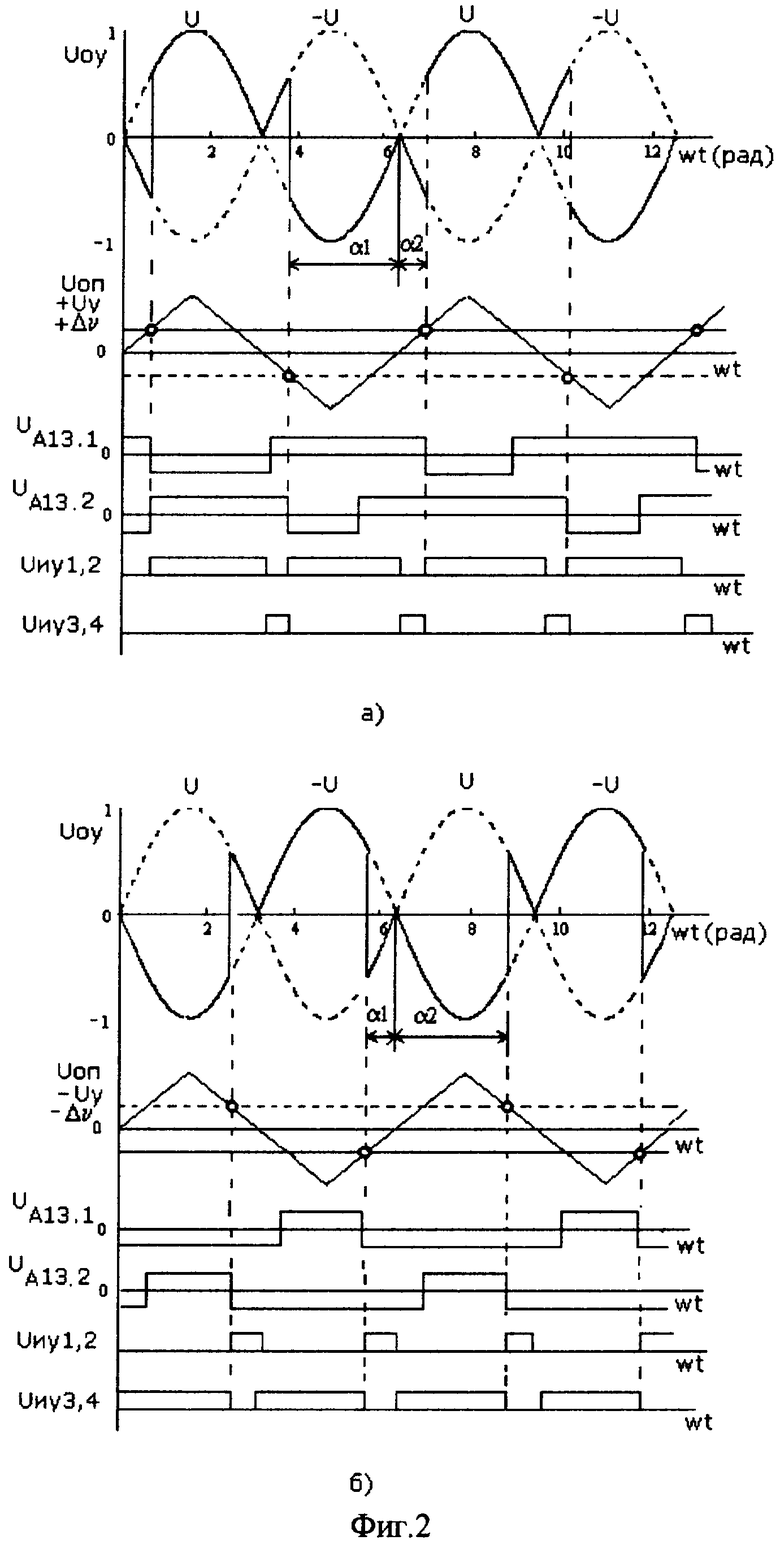
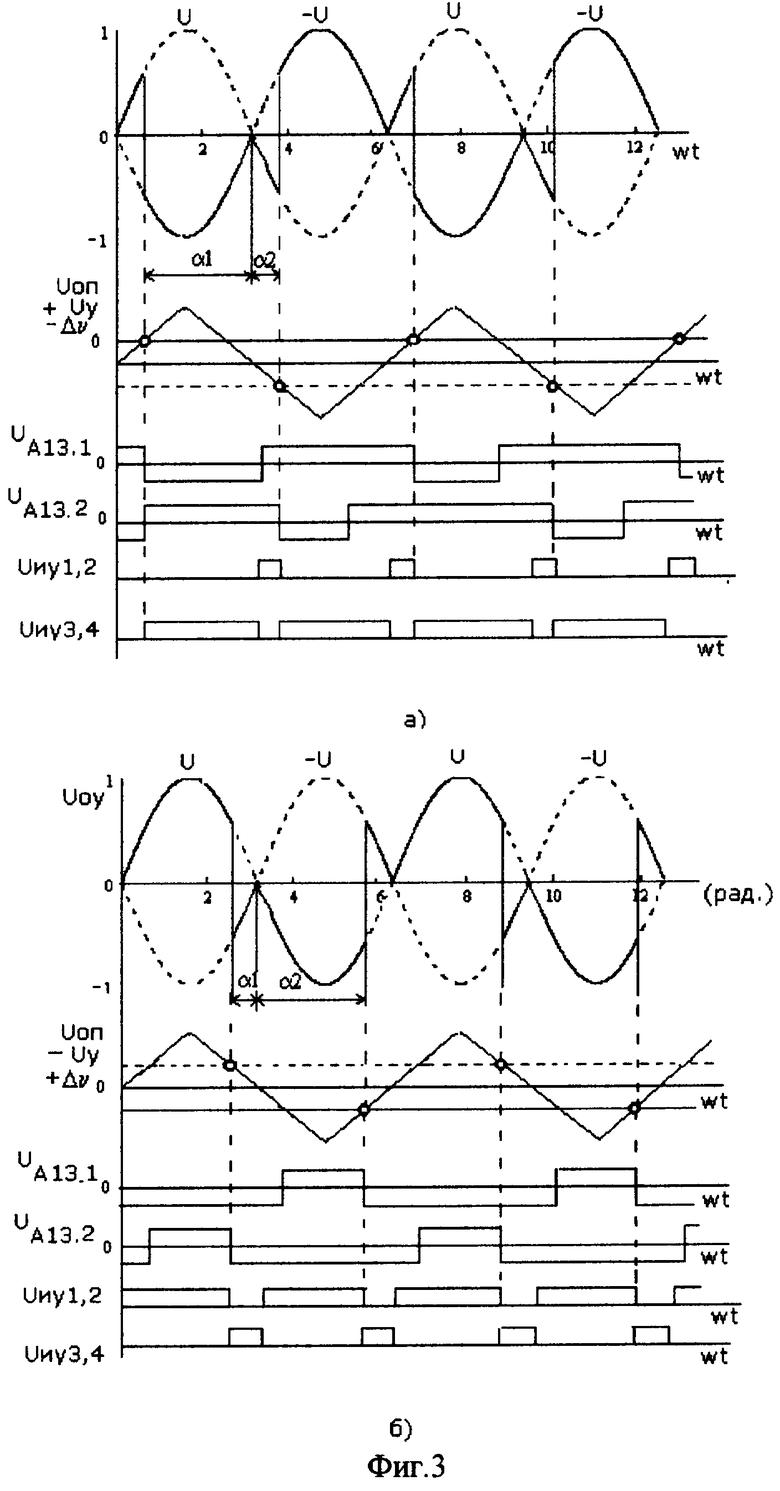
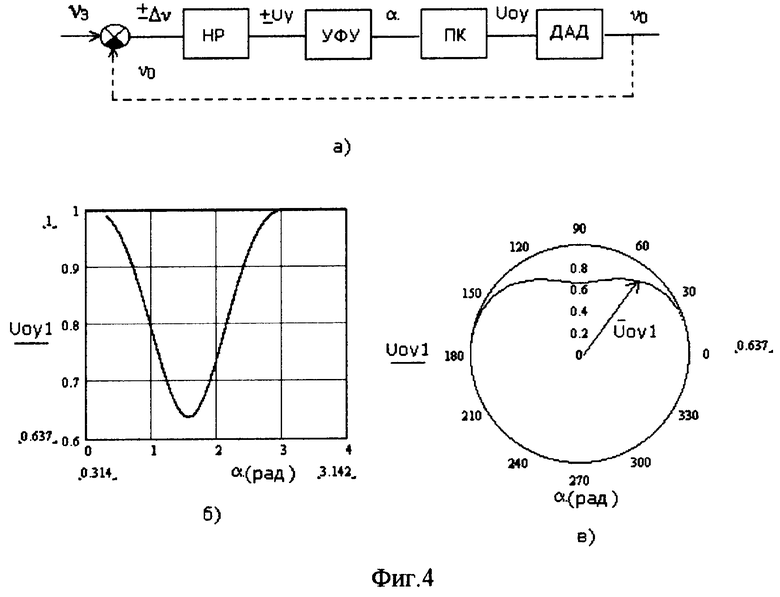
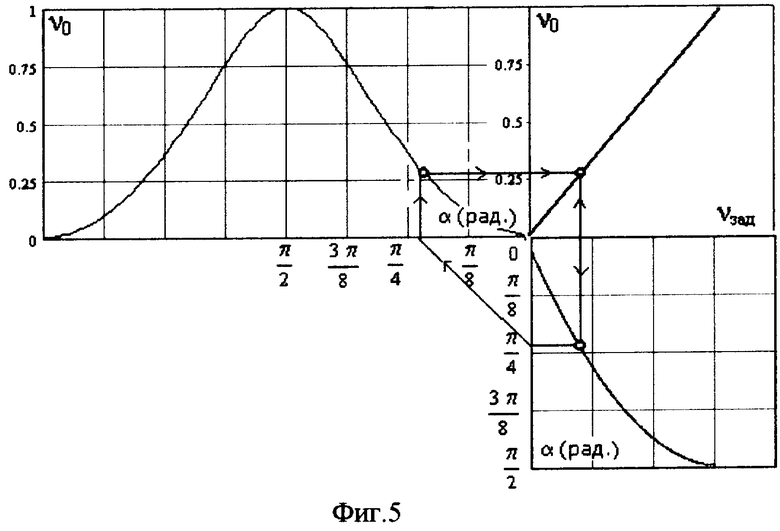
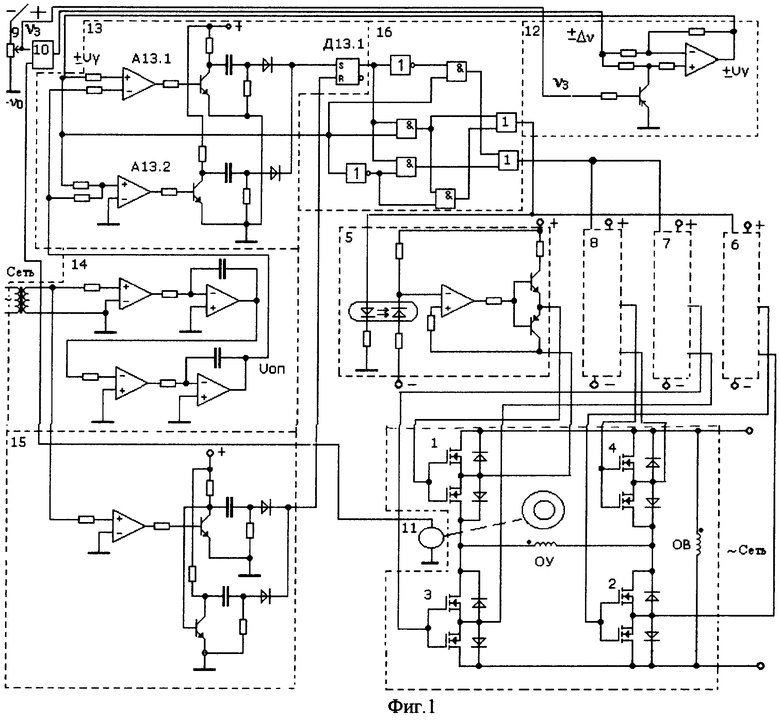
На фиг.1 изображена принципиальная схема электропривода, работа которого происходит в соответствии с предлагаемым способом управления; на фиг.2 - временные диаграммы, иллюстрирующие работу данного устройства при вращении двигателя вперед в двигательном (а) и тормозном (б) режимах; на фиг.3 - аналогичные диаграммы, иллюстрирующие работу устройства при вращении назад в двигательном (а) и тормозном (б) режимах; на фиг 4а приведена структурная схема рассматриваемого устройства, содержащая звенья: HP - нелинейный регулятор, УФУ - устройство импульсно-фазового управления, ПК - полупроводниковый коммутатор, ДАД - двухфазный асинхронный двигатель, а также зависимость действующего значения напряжения основной гармоники на обмотке управления Uoy1 от угла управления α в ортогональной (фиг.4б) и полярной (фиг.4в) системах координат; на графике фиг.5 изображена: во втором квадранте - исходная зависимость частоты вращения в режиме холостого хода от угла управления транзисторами ν 0(α ), в четвертом квадранте - статическая характеристика HP Uy(Δ ν ), в первом квадранте - характеристика звеньев HP-УФУ-ПК-ДАД ν 0(Δ ν ), которые иллюстрируют влияние нелинейного регулятора на форму результирующей регулировочной характеристики электропривода.
Пример выполнения электропривода на базе ДАД с предлагаемым способом фазового управления приведен на фиг.1. Силовая схема данного устройства содержит полупроводниковый коммутатор по симметричной мостовой схеме на четырех транзисторных ключах 1-4 с двухсторонней проводимостью тока. К одной диагонали моста подведено питающее (сетевое) напряжение, а к другой диагонали подключена обмотка управления (ОУ) электродвигателя. К этим же точкам схемы присоединена обмотка возбуждения (0В). Формирование управляющих импульсов для транзисторных ключей осуществляется с помощью согласующих каскадов усиления (драйверов) 5-8, каждый из которых своим выходом присоединен к переходу "затвор - исток" соответствующих силовых МОП-транзисторов. Управление драйверами происходит с помощью УФУ в составе системы автоматического регулирования скорости, основными элементами которой служат: потенциометрический задатчик скорости (ν з) 9 на первом входе HP 10, на второй вход которого поступает сигнал отрицательной обратной связи по скорости вала ν 0 с тахогенератора 11. Сигнал ошибки регулирования Δ ν =ν з-ν 0 перед подачей на вход УФУ пропускается через инвертирующий повторитель 12 с коэффициентом передачи ±1. С выхода данного узла сигнал ошибки регулирования в виде управляющего сигнала Uy поступает на первый вход УФУ 13, второй вход которого служит для подачи опорного сигнала Uоп с выхода специального формирователя 14 опорного сигнала. Для выработки широких управляющих импульсов длительностью, равной проводящему состоянию транзисторов, на третий вход УФУ 13 подаются синхронизирующие импульсы с выхода формирователя 15. Выработка синхроимпульсов осуществляется в моменты времени, совпадающие с моментами перехода питающего напряжения через нулевое значение. Распределение управляющих импульсов с выходов блока 13 по транзисторным ключам осуществляется с помощью блока логики 16.
Известно, что частота вращения ДАД в режиме холостого хода при фазовом управлении пропорциональна синусу фазового угла β между векторами напряжений на ОВ и ОУ. Изменение знака фазового рассогласования ± β ведет к изменению направления вращения электромагнитного поля внутри электрической машины. В зависимости от соотношения между реальной частотой вращения вала ν и частотой вращения поля ν 0, работа машины может происходить в двигательном при ν ≤ ν 0 или тормозном при ν ≥ ν 0 режимах.
Регулирование угла β 1 осуществляется импульсно-фазовым способом на основе двукратного включения каждой пары транзисторов коммутатора в течение периода питающего напряжения. В двигательном режиме при вращени вперед (ν з≥0, Δ ν ≥ 0) изменение фазового угла в пределах 0≤ β 1≤π/2 предлагается обеспечивать изменением углов управления первой пары транзисторных ключей, замеряемых относительно начала положительной полуволны питающего напряжения в пределах -π ≤ α 1≤-π /2, 0≤ α 2≤π/2 с поддержанием постоянства суммы модульных значений этих углов |α 1|+α 2=π . Указанные включения первой пары транзисторов 1, 2, сопровождаемые выключением второй пары транзисторных ключей 3, 4, должны чередоваться на каждом сетевом периоде с включениями второй пары и одновременным выключением первой пары в моменты времени, совпадающие с переходами питающего напряжения через нуль. В режиме рекуперативного торможения при вращении вперед (ν з≥0) превышение ν ≥ ν 0 вызывает изменение знака ошибки регулирования Δ ν ≤ 0, что должно повлечь увеличение фазового угла β 1≥π/2 и перевод коммутатора в инверторный режим. Для этого порядок переключения транзисторных пар должен остаться прежним, но углы управления необходимо изменять в пределах -π /2≤ а1≤0, π /2≤ α 2≤π.
Данное предложение поясняется диаграммами фиг.2а напряжения на обмотке управления Uoy, управляющего Uy и опорного Uоп сигналов на входах УФУ, а также управляющих импульсов, подаваемых на транзисторные ключи первой Uuy1,2 и второй Uuy3,4 пары. Формирование регулируемых фронтов этих импульсов осуществляется на основе вертикального принципа в моменты равенства управляющего и опорного сигналов. Пример выполнения формирователя опорного сигнала на операционных усилителях показан на схеме фиг.1 (блок 14). Принцип действия данного блока очевиден и предполагает последовательное преобразование формы питающего напряжения с сохранением его периода по схеме "синус-меандр-пила-меандр-пила", в результате чего на выходе можно получить опорный сигнал знакопеременной пилообразной формы, совпадающий по фазе с питающим напряжением. Это напряжение подается на вход УФУ, где сравнивается на входах компараторов А13.1, А13.2 с управляющим сигналом Uy. В данном случае этот сигнал имеет положительный знак Uy=Δ ν ≥ 0, так как при положительном задающем сигнале ν з≥0 повторитель 12 работает в режиме неинвертирующего операционного усилителя с коэффциентом передачи +1. Напряжение на выходе компаратора А13.1 меняет знак на отрицательный в моменты равенства управляющего и опорного сигналов по модулю и по знаку, а на выходе компаратора А13.2 - в моменты равенства этих сигналов по модулю при разном знаке. Указанные переключения приводят к переводу триггера Д13.1 в S-состояние, а его возврат в R-состояние происходит под воздействием синхроимпульсов, поступающих из блока 15. В результате на прямом и инверсном выходах указанного триггера появляются так называемые широкие управляющие импульсы, распределение которых по силовым транзисторам с помощью блока 16 происходит с учетом знака задающего сигнала ν з, а именно: при положительном задающем сигнале ν з≥0 на первую пару транзисторов 1, 2 пропускаются импульсы с прямого выхода, а на вторую пару транзисторов 3, 4 пропускаются импульсы с инверсного выхода указанного триггера. При отрицательном задающем сигнале ν з≤0 порядок подачи импульсов на первую и вторую пары транзисторов взаимно меняется. Это приводит к тому, что при ν з≥0 переход из двигательного режима в тормозной не изменит порядка распределения импульсов, однако вследствие изменения знака ошибки регулирования (управляющего сигнала на входе УФУ) на отрицательный Δ ν ≤ 0 регулирование путем изменения фазовых углов включения силовых транзисторов будет происходить в диапазоне -π /2≤ α 1≤0, π /2≤ α 2≤π(см. фиг.2б).
При реверсе для изменения знака фазового рассогласования напряжений на обмотках ОУ и OB β 1≤0 полярность задающего сигнала следует изменить ν з≤0, в результате чего повторитель 12 переходит в режим инвертирующего усилителя с коэффициентом передачи -1. Тогда знак управляющего напряжения будет противоположен знаку ошибки регулирования Uy=-Δ ν . Это позволит по-прежнему осуществлять формирование управляющих импульсов с помощью указанных компараторов и транзисторно-конденсаторных формирователей на их выходах. Однако блок логики 16 изменит порядок распределения управляющих импульсов, в результате чего на управляющие входы первой пары транзисторов начнут поступать импульсы с инверсного выхода триггера Д13.1, а на управляющие входы второй пары - импульсы с прямого выхода этого же триггера. Это приведет к тому, что в двигательном режиме при Δ ν ≤ 0 регулирование будет происходить в диапазоне углов управления -π ≤ α 1≤-π /2, 0≤ α 2≤π/2 (см. фиг.3а), а в тормозном режиме при Δ ν ≥ 0 регулирование будет осуществляться аналогично, но в диапазоне углов управления -π /2≤ α 1<0, π /2≤ α 2≤π(см. фиг.3б).
При анализе статических свойств данного электропривода воспользуемся известным из указанного литературного источника выражением механических характеристик ДАД при фазовом управлении

где ν - относительная частота вращения ротора, приведенная к частоте вращения холостого хода;
m - относительный момент на валу, приведенный к базовому значению Мб=2U
Здесь относительная частота вращения холостого хода при m=0
зависит от углов включения силовых транзисторов, которые должны находиться в соотношении |α 1|+|α 2|=π . Раскладывая напряжение на обмотке управления Uoy в ряд Фурье, запишем выражения для косинусного и синусного коэффициентов при первом слагаемом ряда, полагая при этом α 2=π -α 1; α 1=α .

где Um - амплитуда напряжения питания обмоток.
Отыскивая действующее значение основной гармоники напряжения на ОУ  приходим к выводу, что в процессе регулирования эта составляющая напряжения не остается постоянной, изменяясь в пределах, не превышающих 36% (см. графики зависимостей Uoy1(α ) в ортогональной фиг.4б и полярной фиг.4в системах координат). Это служит одной из причин того, что график регулировочной характеристики ДАД ν 0(α ), представленный во втором квадранте фиг.5, имеет на каждом из участков вращения двигателя в одну сторону α =0-π /2 нелинейный вид. Для устранения этого недостатка на управляющем входе УФУ предлагается установить нелинейный регулятор HP со статической характеристикой Uy(Δ ν ), обратной по отношению к упомянутой регулировочной характеристике двигателя ν 0(α ). Из структурной схемы электропривода фиг.4а видно, что результирующая характеристика звеньев НР, УФУ, ПК, ДАД ν 0(Δ ν ) будет линейной при условии, что в каждой точке диапазона регулирования наблюдается равенство относительных значений входной и выходной координат электропривода Δ ν =ν 0. Для этого требуемая характеристика HP должна быть обратной по отношению к нелинейной характеристике звеньев УФУ-ПК-ДАД α (ν 0). С учетом того, что характеристика УФУ при линейной форме опорного сигнала имеет вид
приходим к выводу, что в процессе регулирования эта составляющая напряжения не остается постоянной, изменяясь в пределах, не превышающих 36% (см. графики зависимостей Uoy1(α ) в ортогональной фиг.4б и полярной фиг.4в системах координат). Это служит одной из причин того, что график регулировочной характеристики ДАД ν 0(α ), представленный во втором квадранте фиг.5, имеет на каждом из участков вращения двигателя в одну сторону α =0-π /2 нелинейный вид. Для устранения этого недостатка на управляющем входе УФУ предлагается установить нелинейный регулятор HP со статической характеристикой Uy(Δ ν ), обратной по отношению к упомянутой регулировочной характеристике двигателя ν 0(α ). Из структурной схемы электропривода фиг.4а видно, что результирующая характеристика звеньев НР, УФУ, ПК, ДАД ν 0(Δ ν ) будет линейной при условии, что в каждой точке диапазона регулирования наблюдается равенство относительных значений входной и выходной координат электропривода Δ ν =ν 0. Для этого требуемая характеристика HP должна быть обратной по отношению к нелинейной характеристике звеньев УФУ-ПК-ДАД α (ν 0). С учетом того, что характеристика УФУ при линейной форме опорного сигнала имеет вид  обратная характеристика HP должна удовлетворять соотношению
обратная характеристика HP должна удовлетворять соотношению
Результаты расчета правой части равенства (4) с помощью выражений (1-3) приведены в таблице.
С помощью численных значений зависимости 2α /π (ν 0) методом регрессии было найдено аналитическое выражение характеристики HP в следующем виде:

Результаты расчета данного выражения приведены в четвертой строке таблицы. Можно видеть, что выражение (5) достаточно точно совпадает с исходной зависимостью (4), так как значения второй и четвертой строк таблицы отличаются не более чем на 10%. Для иллюстрации на фиг.5 показан ход графического построения зависимости ν 0(Δ ν ) с помощью характеристик отдельных звеньев электропривода. Так, например, задаваясь значением ошибки регулирования Δ ν на горизонтальной оси графика, можно путем его проецирования на представленную в четвертом квадранте характеристику HP получить на вертикальной оси значение управляющего сигнала Uy. В свою очередь, проецируя значение Uy на представленный во втором квадранте график характеристики звеньев УФУ-ПК-ДАД, получаем на вертикальной оси соответствующее значение частоты вращения ν 0 Повторяя данные построения, можно убедиться, что получаемая в первом квадранте результирующая регулировочная характеристика электропривода ν 0(Δ ν ), благодаря применению HP, приобретает необходимую линейную форму.
Изобретение относится к области электротехники и может быть использовано в регулируемом электроприводе переменного тока. Техническим результатом является повышение точности и устойчивости регулирования асинхронного электродвигателя в замкнутых системах автоуправления. В способе фазового управления асинхронным исполнительным электродвигателем изменение величины и знака фазы основной гармоники напряжения на обмотке управления с помощью полупроводникового коммутатора, выполненного на двух парах транзисторных ключей по мостовой схеме, осуществляют поочередным двукратным включением каждой пары транзисторов в течение периода питающего напряжения с опережающими углами  при первом и отстающими углами
при первом и отстающими углами  при втором включении при условии, что сумма модульных значений этих углов равна 180 эл.град. В зависимости от требуемого направления вращения с указанными углами включают первую или вторую пару транзисторов, обеспечивающих прямое или, соответственно, инверсное подключение обмотки управления, а другую пару включают в моменты времени, совпадающие с изменениями знака питающего напряжения. Линеаризацию статической характеристики электропривода осуществляют установкой на управляющем входе нелинейного регулятора с обратной регулировочной характеристикой. 1 з.п. ф-лы; 5 ил., 1 табл.
при втором включении при условии, что сумма модульных значений этих углов равна 180 эл.град. В зависимости от требуемого направления вращения с указанными углами включают первую или вторую пару транзисторов, обеспечивающих прямое или, соответственно, инверсное подключение обмотки управления, а другую пару включают в моменты времени, совпадающие с изменениями знака питающего напряжения. Линеаризацию статической характеристики электропривода осуществляют установкой на управляющем входе нелинейного регулятора с обратной регулировочной характеристикой. 1 з.п. ф-лы; 5 ил., 1 табл.

где Uy - сигнал, поступающий с выхода нелинейного регулятора на управляющий вход устройства импульсно-фазового управления.
| ГЛАЗЕНКО Т.А | |||
| и др., Полупроводниковые системы импульсного асинхронного электропривода малой мощности, Ленинград, Энергоатомиздат, 1993, с.109 | |||
| СПОСОБ ФАЗОВОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ТИРИСТОРНЫМ РЕГУЛЯТОРОМ НАПРЯЖЕНИЯ | 1990 |
|
RU2014721C1 |
| СПОСОБ МУЛЯРА УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ M-ФАЗНОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ЕГО ВАРИАНТЫ) | 1993 |
|
RU2106054C1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1986 |
|
SU1339857A1 |
| Электропривод переменного тока | 1991 |
|
SU1815788A1 |
| Окрашенная полимерная композиция | 1981 |
|
SU969704A1 |
| US 4459532 А, 10.07.1984 | |||
| МОЛЕКУЛЯРНЫЕ МАРКЕРЫ ГЕНА RLM2 РЕЗИСТЕНТНОСТИ К ЧЕРНОЙ НОЖКЕ BRASSICA NAPUS И СПОСОБЫ ИХ ПРИМЕНЕНИЯ | 2014 |
|
RU2717017C2 |
| JP 61009179 А, 16.01.1986 | |||
| Реагент-собиратель для флотации гидрофобных минералов | 1980 |
|
SU921631A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

