Изобретение относится к радиотехнике, а именно: к антенной технике, и может быть использовано в радиотехнических системах связи при приеме волн круговой поляризации поля биортогональной антенной системой в условиях воздействия преднамеренных и непреднамеренных помех линейной поляризации, в том числе помех, подобных по спектру полезному сигналу.
Известны способы для борьбы с преднамеренными помехами, основанные на расширении спектра принимаемого сигнала, использовании антенн с узкими диаграммами направленности, разнесенном приеме и адаптивном приеме с исключением пораженных помехой элементов [1]. Достижимый положительный эффект определяется выигрышем от обработки сигналов при приеме и передаче, совместного использования кодов и схем разнесенного приема, а также методов адаптивного приема, при котором в направлении помехи обеспечивают максимальное снижение потока мощности при максимальном увеличении чувствительности в направлении прихода полезного сигнала.
К недостаткам перечисленных способов относятся их низкая эффективность из-за того, что преднамеренные помехи в процессе работы могут изменять как структуру, так и уровень, и в каждой конкретной помеховой ситуации существует априорная неопределенность относительно периода следования, амплитуды помехи. Кроме того, большинство способов для своей реализации требует использования либо нескольких антенн, либо антенных решеток.
Известны способы разнесенного приема сигналов, обеспечивающие максимизацию отношения сигнал/шум+помеха: разнесенный прием с коммутацией ветвей разнесения, когерентное сложение сигналов с восстановлением несущей частоты или с использованием отдельного пилот-сигнала. Достоинством способов разнесенного приема сигналов является их более высокая помехоустойчивость. Кроме того, эти способы целесообразно использовать для ослабления влияния многолучевости [2, с.303-435]. К недостаткам указанных способов следует отнести возможность их работы только с полезными сигналами линейной поляризации.
Известен способ разнесенной передачи и приема двух ортогонально поляризованных волн [2, с.120-124], основанный на излучении двух ортогонально поляризованных волн близко расположенными антеннами, например вертикальными электрическим и магнитным диполями, на независимом приеме излученных электромагнитных колебаний и их последующей обработке.
Так как излучаемая мощность распределена одинаково в двух различных плоскостях поляризации, то в системе с поляризационной селекцией по сравнению с системой, в которой осуществляется прием на пространственно разнесенные антенны, наблюдается среднее уменьшение мощности на 3 дБ, что является недостатком известного способа [2, с.121].
Известен способ поляризационной селекции помех при приеме электромагнитной волны круговой поляризации, описанный в [3] и реализованный в устройстве [4]. Способ разработан для повышения эффективности приема-передачи электромагнитных волн круговой поляризации при работе на низких и средних углах места. Способ основан на независимом приеме компонент электромагнитной волны  и
и  ортогональной парой вибраторов, образующей турникетную антенну, формировании сигналов
ортогональной парой вибраторов, образующей турникетную антенну, формировании сигналов

где γ - угол между векторами напряженности полей первого  и второго
и второго  вибраторов:
вибраторов:

ε - угол места;
А - азимутальный угол,
сравнении модулей сигналов  sinγ, формировании опорного сигнала, соответствующего сигналу
sinγ, формировании опорного сигнала, соответствующего сигналу  нахождении разности сигналов
нахождении разности сигналов  задержке опережающего сигнала на
задержке опережающего сигнала на  в соответствии с направлением вращения поляризационного эллипса полезного сигнала и формировании выходного сигнала как суммы сигналов
в соответствии с направлением вращения поляризационного эллипса полезного сигнала и формировании выходного сигнала как суммы сигналов 
Получаемое при реализации этого способа решение, несмотря на обеспечение коэффициента эллиптичности, близкого к единице, при низких и средних углах места, не является оптимальным, поскольку не учитываются помеховые сигналы, а вводимое ослабление сигналов в трактах излучателей для выравнивания амплитуд сигналов снижает помехоустойчивость приемной системы. Следует отметить, что поляризационные эффекты в атмосфере, приводящие к возникновению кросс-поляризационной составляющей, при реализации данного способа не учитываются. Между тем их влияние приводит к уменьшению амплитуды полезного сигнала и увеличению помех.
Более близким по технической сущности к заявляемому способу является способ подавления помех при приеме электромагнитной волны круговой поляризации биортогональной антенной системой, в том числе и помех, подобных по спектру полезному сигналу, реализованный в устройстве [5]. Он основан на независимом приеме биортогональной антенной системой ортогонально поляризованных компонент смеси полезного сигнала и помехи, преобразовании указанных компонент, приеме помехового сигнала линейно поляризованной антенной, ортогональной апертуре биортогональной антенной системы, формировании опорного комплексно взвешенного сигнала, компенсации (подавлении) помехового сигнала, выравнивании амплитуд и фаз сигналов, соответствующих ортогональным компонентам полезного сигнала, и образовании выходного сигнала биортогональной антенной системы на основе суммирования выравненных сигналов. При реализации данного способа могут быть подавлены помехи, подобные по спектру полезному сигналу.
Недостатком известного способа является ограниченность направлений прихода помехового сигнала, так как при его реализации эффективно подавляются помехи, направления прихода которых близки к нормали к раскрыву биортогональной антенной системы. Кроме того, флуктуации амплитуд помехи и полезного сигнала ухудшают возможность компенсации помехи.
Предлагаемый способ направлен на устранение упомянутых недостатков известных способов, т.е. направлен на повышение отношения сигнал/помеха+шум при приеме электромагнитной волны круговой поляризации биортогональной антенной системой за счет подавления помех, в том числе и подобных по спектру полезному сигналу, в широком секторе углов.
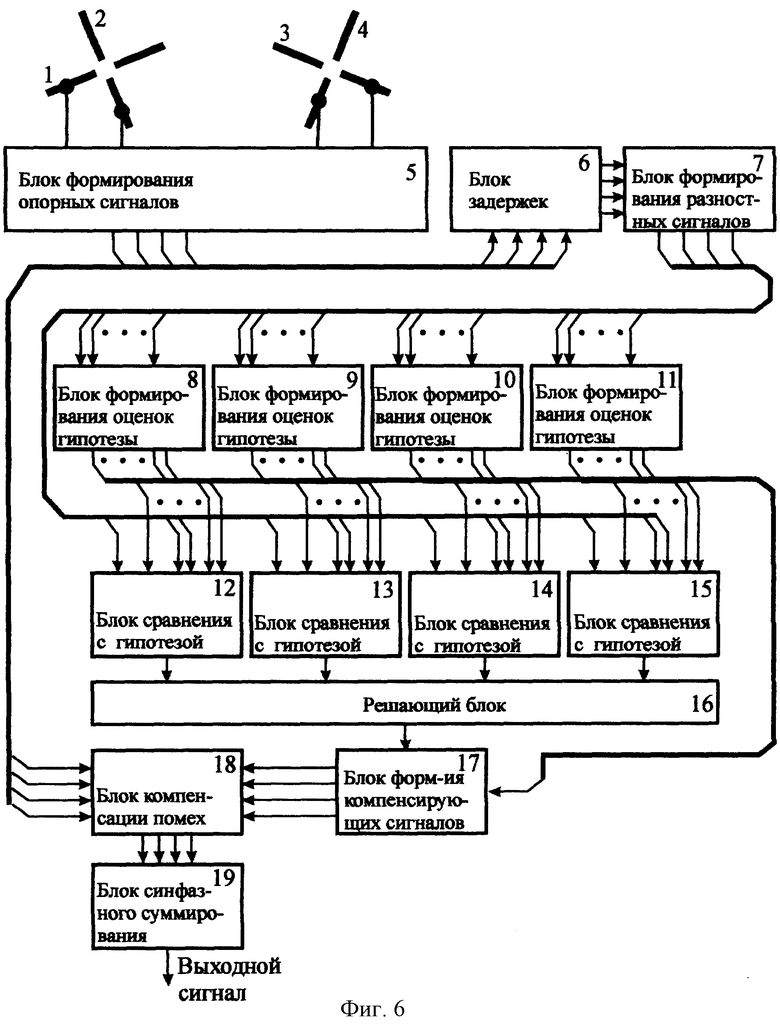
Структурная схема устройства, функционирующего по предлагаемому способу, представлена на фиг.6.
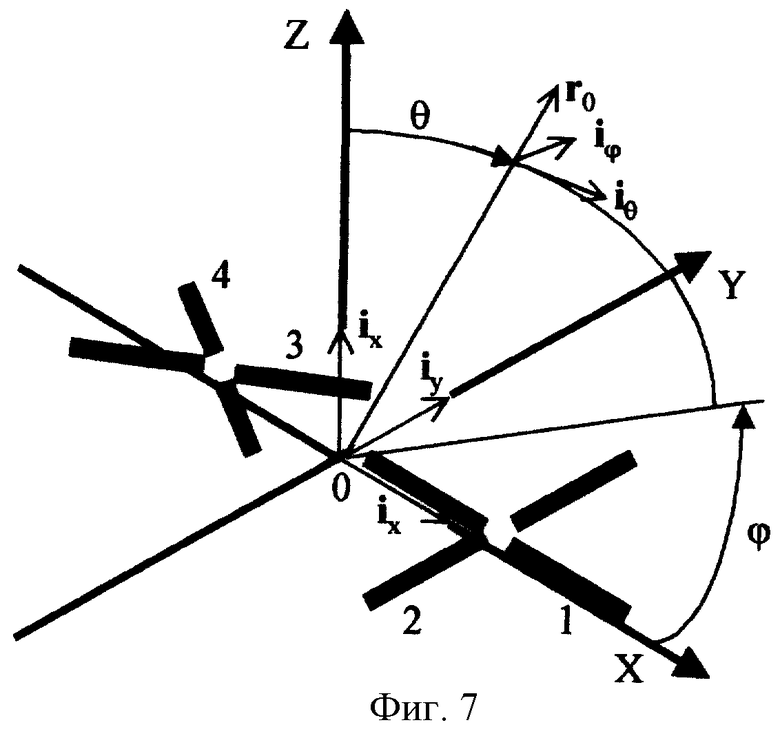
На фиг.7 показаны прямоугольная и сферическая системы координат и взаимное размещение в этих системах двух биортогональных антенных систем.
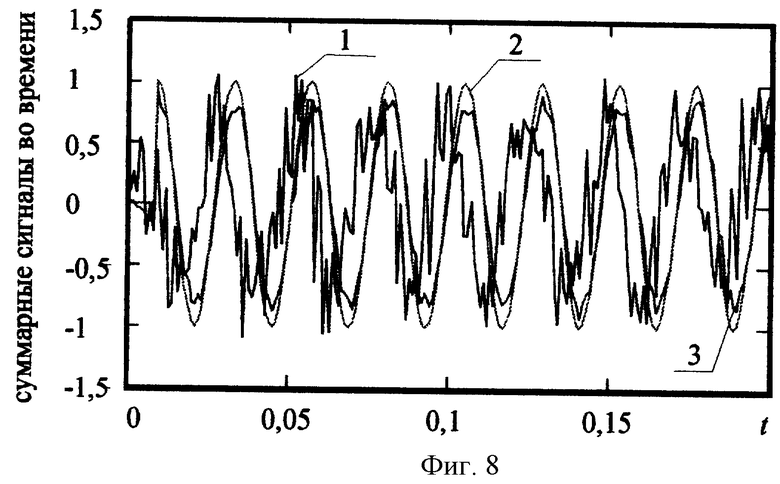
На фиг.8 показаны временные зависимости принимаемого сигнала при отсутствии помех, при четырехкратном превышении помех над сигналом и выходного сигнала устройства, реализующего предлагаемый способ.
Рассмотрим существо предлагаемого способа. Как и в прототипе, сигналы принимают независимо каждым плечом биортогональной антенной системы, преобразуют принятые сигналы в сигналы, пропорциональные тангенциальным составляющим напряженности электромагнитного поля, формируют опорный сигнал, компенсируют помеховые сигналы, выравнивают фазы сигналов, соответствующих ортогональным компонентам полезного сигнала, и образуют выходной сигнал биортогональной антенной системы на основе суммирования выравненных сигналов. Однако, в отличие от способа-прототипа, прием электромагнитной волны круговой поляризации осуществляют с помощью двух биортогональных антенных систем, развернутых друг относительно друга на угол 45°, формируют из преобразованных сигналов четыре опорных сигнала, которые попарно пропорциональны тангенциальным составляющим напряженности электромагнитного поля, выравнивают во времени девять отсчетов опорных сигналов в течение времени, равного 3Т/8, через промежутки времени, равные T/8, где Т - период несущего колебания, формируют десять разностных сигналов Δi (i=1,2,...,10), получаемых вычитанием отсчетов двух опорных сигналов, амплитуды полезных сигналов которых при отсутствии помех равны, находят четыре совокупности гипотетических реализаций помехового сигнала, предполагая, что тангенциальная составляющая напряженности электромагнитного поля помехового сигнала ориентирована для каждой совокупности реализаций под углом  соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала, оценивают достоверность каждой из четырех гипотез и выбирают наиболее достоверную из них путем формирования совокупности гипотетических разностных сигналов
соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала, оценивают достоверность каждой из четырех гипотез и выбирают наиболее достоверную из них путем формирования совокупности гипотетических разностных сигналов  и получения невязок между гипотетическими
и получения невязок между гипотетическими  и реальными Δi разностными сигналами. Затем формируют четыре компенсирующих сигнала, соответствующих выбранной гипотезе, компенсируют помеховые сигналы путем вычитания компенсирующих сигналов из опорных сигналов, образуя четыре откорректированных сигнала. Как и в прототипе, производят выравнивание откорректированных сигналов по фазе. Выравнивание по фазе при этом производят в каждой из пар, задерживая опережающий сигнал на четверть периода несущего колебания, и между парами, задерживая на восьмую часть периода несущего колебания сигнал второй биортогональной антенной системы, являющийся опережающим. Как и в прототипе, выходной сигнал биортогональных антенных систем образуют суммированием сигналов после выравнивания по фазе.
и реальными Δi разностными сигналами. Затем формируют четыре компенсирующих сигнала, соответствующих выбранной гипотезе, компенсируют помеховые сигналы путем вычитания компенсирующих сигналов из опорных сигналов, образуя четыре откорректированных сигнала. Как и в прототипе, производят выравнивание откорректированных сигналов по фазе. Выравнивание по фазе при этом производят в каждой из пар, задерживая опережающий сигнал на четверть периода несущего колебания, и между парами, задерживая на восьмую часть периода несущего колебания сигнал второй биортогональной антенной системы, являющийся опережающим. Как и в прототипе, выходной сигнал биортогональных антенных систем образуют суммированием сигналов после выравнивания по фазе.
Проведенный сравнительный анализ заявленного способа и прототипа показывает: заявленный способ отличается тем, что изменена совокупность действий, порядок их выполнения во времени и в различных сочетаниях:
изменены условия выполнения действия, связанного с приемом электромагнитной волны круговой поляризации: осуществляют прием электромагнитной волны круговой поляризации с помощью двух биортогональных антенных систем, развернутых друг относительно друга на угол 45°;
изменены условия выполнения действия, связанного с формированием опорного сигнала: во-первых, формируют из преобразованных сигналов (представляющих собой смесь полезного сигнала и помехи) четыре опорных сигнала, которые попарно пропорциональны тангенциальным составляющим напряженности электормагнитного поля; во-вторых, формируют десять разностных сигналов Δi (i=1,2,...10), получаемых вычитанием отсчетов двух опорных сигналов, амплитуды полезных сигналов которых при отсутствии помех равны; в-третьих, формируют четыре компенсирующих сигнала, соответствующих выбранной гипотезе;
изменены условия выполнения действия, связанного с компенсацией помехового сигнала: компенсируют помеховые сигналы путем вычитания четырех компенсирующих сигналов, соответствующих выбранной гипотезе, из опорных сигналов, образуя четыре откорректированных сигнала;
изменены условия выполнения действия, связанного с выравниванием сигналов по фазе: производят выравнивание по фазе опорных сигналов в каждой из пар, задерживая опережающий сигнал на четверть периода несущего колебания, и между парами, задерживая на восьмую часть периода несущего колебания сигнал второй биортогональной системы, являющийся опережающим;
изменены условия выполнения действия, связанного с суммированием сигналов, сумма которых образует выходной сигнал: суммируют сигналы в каждой из пар и между парами, образуя выходной сигнал биортогональных антенных систем;
введено действие, обеспечивающее выравнивание во времени девяти отсчетов опорных сигналов в течение времени, равного  через промежутки времени, равные
через промежутки времени, равные  где Т - период несущего колебания;
где Т - период несущего колебания;
введено действие, связанное с нахождением четырех совокупностей гипотетических реализации помехового сигнала при предположении, что тангенциальная составляющая напряженности электромагнитного поля помехового сигнала ориентирована для каждой совокупности реализаций под углом  соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала;
соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала;
введено действие, обеспечивающее оценку достоверности каждой из четырех гипотез и выбор наиболее достоверной из них путем формирования совокупности гипотетических разностных сигналов  и получения невязок между гипотетическими
и получения невязок между гипотетическими  и реальными Δi разностными сигналами.
и реальными Δi разностными сигналами.
Рассмотрим предлагаемый способ подавления помех при приеме электромагнитной волны круговой поляризации биортогональной антенной системой, в том числе и помех, подобных по спектру полезному сигналу, полагая, что помехи имеют линейную поляризацию. С учетом структурной схемы устройства подавления помех, представленной на фиг.6, проведем теоретическое обоснование предлагаемого способа.
Как известно, среда и сама антенна в подавляющих случаях линейно взаимодействуют с сигналом и помехой. Любая антенна, являясь резонансной системой, осуществляет частотную селекцию полезного сигнала. При этом основная доля энергии полезного сигнала приходится на достаточно узкую полосу частот, составляющие которой близки к рабочей (резонансной) частоте антенны. Поэтому, с целью упрощения выкладок, будем полагать, что помеха аддитивна и взаимодействие помехи и сигнала осуществляется на частоте сигнала, и, следовательно, все преобразования будем рассматривать относительно комплексных амплитуд сигналов и помех.
Рассмотрим антенну, состоящую из двух биортогональных систем электрических вибраторов, развернутых друг относительно друга на угол 45°. Для уменьшения взаимного влияния элементов антенны центры каждой из пар симметричных вибраторов могут быть разнесены в плоскости раскрыва на заданное расстояние.
Пусть каждый симметричный вибратор осуществляет независимый прием сигнала круговой поляризации, приходящего с направления (θ,ϕ). При этом направление вращения поляризационного эллипса полезного сигнала является заданным.
Выберем прямоугольную декартовую систему координат и связанную с ней сферическую систему координат так, как показано на фиг.7.
Обозначим сигналы, принимаемые каждым из четырех вибраторов, u1, u2, u3 и u4 соответственно (здесь индекс 1, 2, 3 и 4 определяется номером симметричного вибратора на фиг.7).
Для заданного направления прихода полезного сигнала и выбранного типа излучателей преобразуем сигналы u1, u2 и u3, u4 попарно в четыре опорных сигнала, пропорциональных тангенциальным составляющим напряженности электромагнитного поля, которые для каждой пары обозначим uθ1, uϕ1 и uθ2, uϕ2.
Данное преобразование с учетом введенной системы координат для симметричных электрических вибраторов может быть представлено в виде [6]:
Так как направление вращения поляризационного эллипса является заданным, то будем полагать, что при отсутствии помех сигнал uθ1 отстает от сигнала uϕ1 на четверть периода несущего колебания, а сигналы uθ2, uϕ2 отстают от соответствующих сигналов пары uθ1, uϕ1 на восьмую часть периода несущего колебания. Такое допущение не нарушает общности рассуждений.
В момент времени t принимаемые при отсутствии помех сигналы описываются выражениями вида

где Т - период несущего колебания; u0(t) - зависимость полезного сигнала во времени.
через интервал времени  эти же сигналы примут вид
эти же сигналы примут вид

Для моментов времени  аналогичные зависимости будут иметь вид
аналогичные зависимости будут иметь вид
соответственно.
Анализ выражений (5)-(8) позволяет выделить девять пар сигналов, амплитуды которых будут при отсутствии влияния помеховых сигналов равны, т.е. могут быть записаны следующие выражения



При наличии помеховых сигналов данные равенства нарушаются, так как на каждый из четырех сигналов uθ1, uϕ1 и uθ2, uϕ2 помеховые сигналы воздействуют по-разному.
Пусть теперь на рабочей частоте антенны действует помеховый сигнал n(t). Предположим, что данный сигнал является линейно поляризованным, и тангенциальная составляющая вектора напряженности ориентирована относительно тангенциальной составляющей опережающего опорного сигнала (применительно к рассматриваемому случаю относительно тангенциальной составляющей сигнала uϕ1) под углом  .
.
Тогда в первый момент времени воздействие помехового сигнала на принимаемые сигналы, используемые в выражениях (9)-(11), можно описать с помощью выражений вида
В моменты времени  аналогичные выражения будут иметь следующий вид
аналогичные выражения будут иметь следующий вид

Найдем десять разностных сигналов Δi (i=1,2,...,10), получаемых вычитанием отсчетов двух опорных сигналов, амплитуды полезных сигналов которых при отсутствии помех равны:





Из анализа выражений (12)-(20) следует, что полученные разностные сигналы не зависят от параметров полезного сигнала и определяются только параметрами помехи. Если предположить, что угол α между тангенциальными составляющими напряженности электромагнитного поля помехи и опережающего опорного сигнала известен, то на основании выражений (12)-(20) может быть записана система из десяти линейных уравнений, в которых неизвестными будут четыре отсчета помехового сигнала:
Получаемая система уравнений является переопределенной. При этом можно утверждать, что если параметр α известен точно, то найденное решение должно будет удовлетворять всем уравнениям, даже в том случае, когда для определения 
 использовалась только часть уравнений. Это позволяет использовать часть уравнений для решения системы, а часть - для проверки полученного решения.
использовалась только часть уравнений. Это позволяет использовать часть уравнений для решения системы, а часть - для проверки полученного решения.
Найдем решения системы уравнений для четырех гипотез:
 .
.
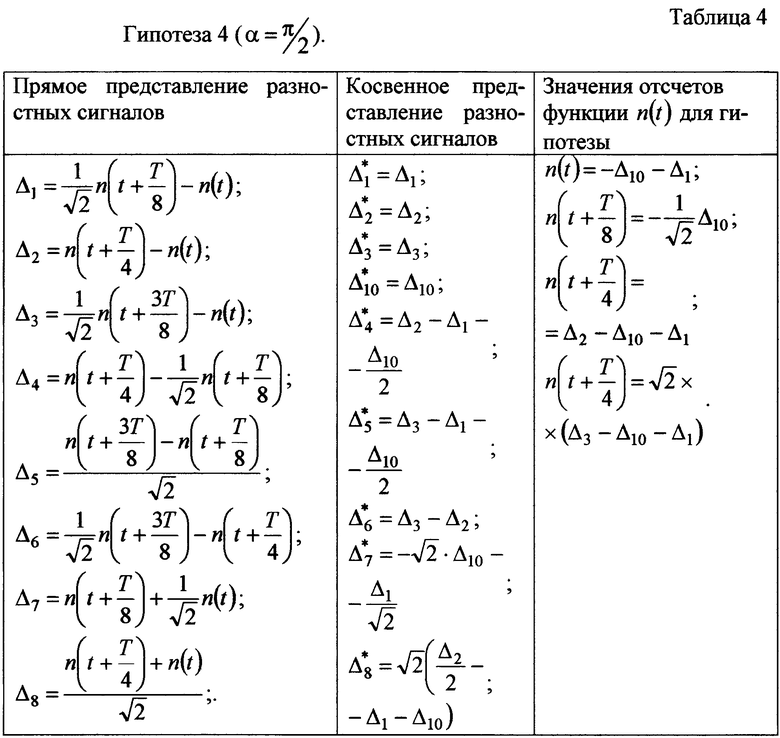
На основании выражений (12)-(20) для  получим (см. Приложение 1, таблица 4):
получим (см. Приложение 1, таблица 4):
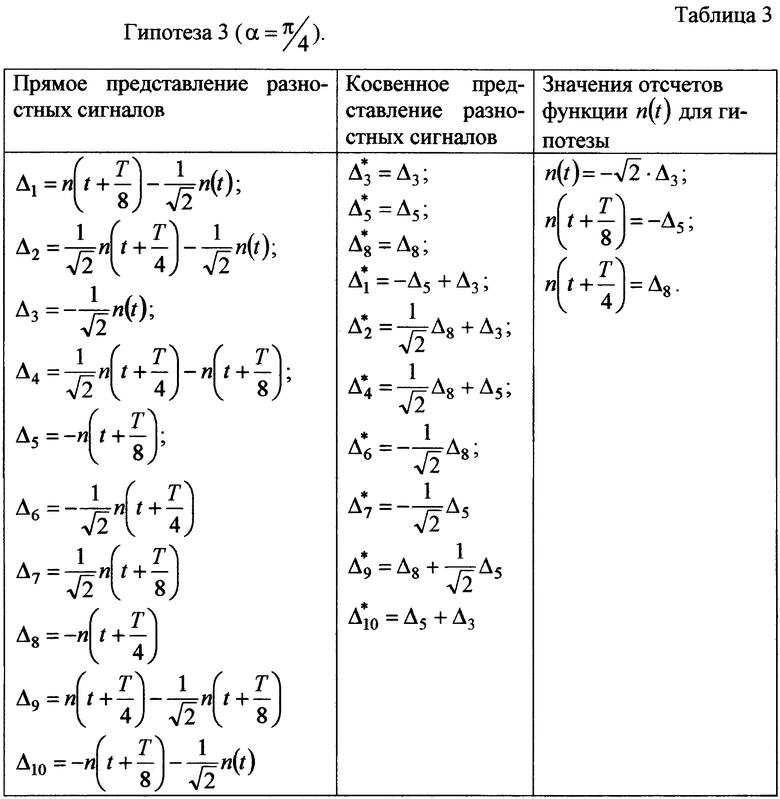
Пусть теперь  тогда аналогично (см. Приложение 1, таблица 3) можно определить
тогда аналогично (см. Приложение 1, таблица 3) можно определить 
Отсутствие составляющей шума  для данной гипотезы нетрудно уяснить, если принять во внимание соотношение (20) комбинации сигнала и шума. Как видно из этого соотношения, при
для данной гипотезы нетрудно уяснить, если принять во внимание соотношение (20) комбинации сигнала и шума. Как видно из этого соотношения, при  эта составляющая шума исчезает, т.к.
эта составляющая шума исчезает, т.к. 
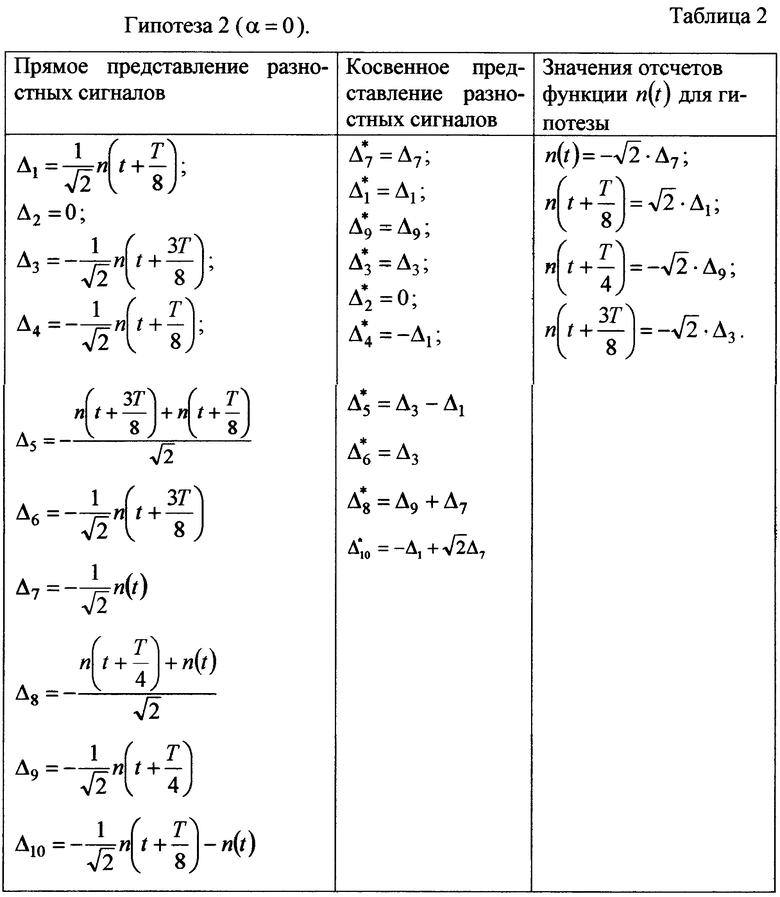
Для α=0 аналогичные выражения будут иметь вид (см. Приложение 1, таблица 2):
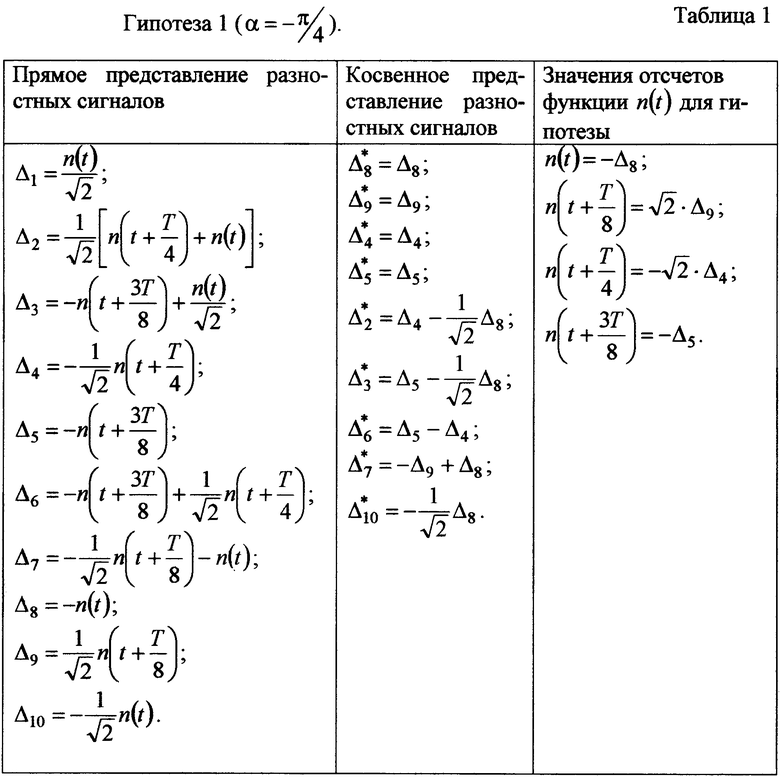
Наконец, для  найдем (см. Приложение 1, таблица 1):
найдем (см. Приложение 1, таблица 1):
В правой части выражений (21)-(35) стоят линейные комбинации разностных сигналов, получаемые на основе сохраняемых отсчетов опорных сигналов, в левой части - отсчеты помехового сигнала, соответствующие одной из четырех гипотез. Подставим найденные для каждой из гипотез параметры помехового сигнала в выражения (12)-(20), после чего найдем гипотетические разностные сигналы  (i=1,2,...,10).
(i=1,2,...,10).
Если одна из гипотез верна, то ее гипотетические разностные сигналы совпадут с соответствующими разностными сигналами. Если угол α близок к одному из четырех углов:  то невязки между реальными разностными сигналами и соответствующими гипотетическими разностными сигналами будут меньше. Поэтому для вычисления невязок для каждой из гипотез в любой момент времени может использоваться формула вида
то невязки между реальными разностными сигналами и соответствующими гипотетическими разностными сигналами будут меньше. Поэтому для вычисления невязок для каждой из гипотез в любой момент времени может использоваться формула вида

С учетом того, что случайные ошибки при определении амплитуд опорных сигналов могут приводить к ошибкам в определении невязок и, следовательно, к неправильному принятию решения при выборе гипотезы, результирующие невязки должны определяться после интегрирования за некоторый промежуток времени τ, т.е.

В результате сравнения невязок ε для каждой из четырех гипотез выбирается та, у которой величина ε - наименьшая. После выбора гипотезы получаем величину α и зависимость n(t), которые позволяют на основании выражений (12)-(14) при заданном направлении θ, ϕ прихода полезного сигнала скомпенсировать воздействие помех.
Работа устройства, функционирующего по предложенному способу, может быть проиллюстрирована с помощью фиг.6. Смесь полезного сигнала и помехи принимается независимо плечами 1 и 2, 3 и 4 вибраторов, входящих соответственно в первую и вторую биортогональные антенные системы, взаимно развернутые на угол 45°. Ортогонально поляризованные компоненты принятых сигналов u1 и u2, u3 и u4 поступают в блок 5 формирования опорных сигналов, где в соответствии с заданным направлением прихода θ, ϕ полезных сигналов осуществляется преобразование четырех принятых сигналов в соответствии с выражениями (1)-(4) в четыре опорных сигнала uθ1 и uϕ1, uθ2 и uϕ2, попарно пропорциональные тангенциальным составляющим напряженности электромагнитного поля. Кроме того, в блоке формирования опорных сигналов может производиться и преобразование частоты принятых сигналов. Учитывая, что для этого преобразования может использоваться набор стандартных элементов, данное преобразование не рассматривается. Опорные сигналы uθ1 и uϕ1, uθ2 и uϕ2 подаются на входы блока 6 задержек, где осуществляется выравнивание во времени отсчетов сигналов в течение времени  через
через  где Т - период несущего колебания (полезного сигнала). В результате на выходе блока 6 задержек формируется девять отсчетов опорных сигналов (см. выражения (9)-(11)). Из пар отсчетов сигналов, амплитуды которых равны при отсутствии помех, в соответствии с выражениями (12)-(20) в блоке 7 формирования разностных сигналов формируются десять разностных сигналов Δi (i=1,2,...,10), которые поступают на вход блоков 8-11 формирования оценок гипотез. В каждом блоке формирования оценки гипотезы осуществляется определение гипотетических отсчетов помехового сигнала n(t) (см. выражения (21)-(35)) и составляется десять гипотетических разностных сигналов
где Т - период несущего колебания (полезного сигнала). В результате на выходе блока 6 задержек формируется девять отсчетов опорных сигналов (см. выражения (9)-(11)). Из пар отсчетов сигналов, амплитуды которых равны при отсутствии помех, в соответствии с выражениями (12)-(20) в блоке 7 формирования разностных сигналов формируются десять разностных сигналов Δi (i=1,2,...,10), которые поступают на вход блоков 8-11 формирования оценок гипотез. В каждом блоке формирования оценки гипотезы осуществляется определение гипотетических отсчетов помехового сигнала n(t) (см. выражения (21)-(35)) и составляется десять гипотетических разностных сигналов  (i=1,2,...,10). Гипотетические разностные сигналы
(i=1,2,...,10). Гипотетические разностные сигналы  (i=1,2,...,10) поступают на входы соответствующих блоков 12-15 сравнения с гипотезой. В каждом блоке 12-15 сравнения с гипотезой осуществляется вычисление невязок между гипотетическими и реальными разностными сигналами на основании выражений (36), (37). Полученные четыре сигнала невязки с выходов блоков 12-15 сравнения с гипотезой поступают на соответствующие входы решающего блока 16. В решающем блоке 16 выбирается сигнал невязки с наименьшей амплитудой. На выходе решающего блока формируется параллельный код, однозначно определяющий выбранную гипотезу, т.е. значение α в выражениях (12)-(20). Полученный код поступает на вход блока 17 формирования компенсирующих сигналов. С выходов блоков 8-11 формирования оценок гипотезы на второй вход блока 17 формирования компенсирующих сигналов поступают четыре сигнала, соответствующих значениям гипотетических отсчетов сигнала помехи n(t) для всех четырех гипотез. В блоке 17 формирования компенсирующих сигналов на основании параллельного кода, поступающего на первый вход, осуществляется выбор гипотетического отсчета сигнала помехи n(t), соответствующего выбранной в решающем устройстве 16 гипотезе, и формируются четыре компенсирующих сигнала n(t)sinα, n(t)cosα,
(i=1,2,...,10) поступают на входы соответствующих блоков 12-15 сравнения с гипотезой. В каждом блоке 12-15 сравнения с гипотезой осуществляется вычисление невязок между гипотетическими и реальными разностными сигналами на основании выражений (36), (37). Полученные четыре сигнала невязки с выходов блоков 12-15 сравнения с гипотезой поступают на соответствующие входы решающего блока 16. В решающем блоке 16 выбирается сигнал невязки с наименьшей амплитудой. На выходе решающего блока формируется параллельный код, однозначно определяющий выбранную гипотезу, т.е. значение α в выражениях (12)-(20). Полученный код поступает на вход блока 17 формирования компенсирующих сигналов. С выходов блоков 8-11 формирования оценок гипотезы на второй вход блока 17 формирования компенсирующих сигналов поступают четыре сигнала, соответствующих значениям гипотетических отсчетов сигнала помехи n(t) для всех четырех гипотез. В блоке 17 формирования компенсирующих сигналов на основании параллельного кода, поступающего на первый вход, осуществляется выбор гипотетического отсчета сигнала помехи n(t), соответствующего выбранной в решающем устройстве 16 гипотезе, и формируются четыре компенсирующих сигнала n(t)sinα, n(t)cosα,  и
и  . При этом тригонометрические множители при n(t) для выбранного значения α представляют собой постоянные коэффициенты усиления, однозначно определяемые выбором гипотезы. Полученные компенсирующие сигналы поступают на первые четыре входа блока 18 компенсации помех. На вторые четыре входа блока 18 компенсации помех поступают четыре опорных сигнала uθ1, и uϕ1, uθ2 и uϕ2. В данном блоке производится инвертирование компенсирующих сигналов, после чего осуществляется суммирование данных сигналов с соответствующими опорными сигналами. Формируемые в блоке 18 компенсации помех четыре откорректированных сигнала поступают на вход блока 19 синфазного суммирования, в котором в каждой паре опорных сигналов uθ1 и uϕ1, uθ2 и uϕ2 осуществляется задержка опережающего сигнала на четверть периода несущего колебания полезного сигнала. После этого задерживаются на восьмую часть периода несущего колебания сигналы в опережающей паре. Затем все четыре получаемых сигнала суммируются, образуя выходной сигнал устройства.
. При этом тригонометрические множители при n(t) для выбранного значения α представляют собой постоянные коэффициенты усиления, однозначно определяемые выбором гипотезы. Полученные компенсирующие сигналы поступают на первые четыре входа блока 18 компенсации помех. На вторые четыре входа блока 18 компенсации помех поступают четыре опорных сигнала uθ1, и uϕ1, uθ2 и uϕ2. В данном блоке производится инвертирование компенсирующих сигналов, после чего осуществляется суммирование данных сигналов с соответствующими опорными сигналами. Формируемые в блоке 18 компенсации помех четыре откорректированных сигнала поступают на вход блока 19 синфазного суммирования, в котором в каждой паре опорных сигналов uθ1 и uϕ1, uθ2 и uϕ2 осуществляется задержка опережающего сигнала на четверть периода несущего колебания полезного сигнала. После этого задерживаются на восьмую часть периода несущего колебания сигналы в опережающей паре. Затем все четыре получаемых сигнала суммируются, образуя выходной сигнал устройства.
Блок 5 формирования опорных сигналов может быть реализован аналогично прототипу [5].
Блок 6 задержек состоит из восьми линий задержек, для реализации которых могут использоваться стандартные СВЧ-устройства.
Блок 7 формирования разностных сигналов реализуется с помощью стандартных устройств инвертирования и суммирования сигналов.
Блоки 8-11 формирования оценок гипотезы содержат усилители с заданными коэффициентами усиления для каждой гипотезы и устройства инвертирования и суммирования сигналов.
Блоки 12-15 содержат устройства инвертирования, суммирования, а также квадраторы и интеграторы.
Решающий блок 16 может содержать компараторы и логические устройства, с помощью которых осуществляется выбор наименьшего по амплитуде сигнала из четырех входных сигналов. Кроме того, в решающем блоке 16 должен содержаться кодирующий блок, на выходе которого формируется параллельный код, соответствующий выбранной гипотезе.
Блок 17 формирования компенсирующих сигналов может содержать четыре аналоговых ключа, усилители с заданными коэффициентами усиления для выбранной гипотезы и сумматоры.
Блок 18 компенсации помех содержит устройства инвертирования и суммирования.
Блок 19 синфазного суммирования содержит четыре линии задержки и устройства попарного суммирования четырех аналоговых сигналов.
Таким образом, устройство, реализующее предлагаемый способ, состоит из стандартных блоков, реализация которых описана в известной литературе.
Для оценки эффективности предложенного способа были проведены численные исследования, в ходе которых оценивалось отношение максимальной ошибки в принимаемой амплитуде полезного сигнала за заданный интервал времени к максимальной ошибке, получаемой в случае отсутствия компенсации помех.
Полученные результаты показали возможность полной компенсации помехового сигнала при совпадении существующего угла α с гипотетическим углом. Наихудшая эффективность у предлагаемого способа соответствует случаю, когда разность между существующим углом α и гипотетическим составляет  Однако и в этом случае выигрыш составил более 10%.
Однако и в этом случае выигрыш составил более 10%.
На фиг.8 приведены зависимости сигналов во времени. Кривая 1 соответствует принимаемому зашумленному сигналу при четырехкратном превышении уровня помехи над амплитудой сигнала, принимаемого одним из вибраторов после синфазного суммирования сигналов биортогональных антенных систем. Сдвиг по фазе между полезным и помеховым сигналами составил 135°, тангенциальная составляющая помехи действует под углом 5° к тангенциальной составляющей опережающего опорного сигнала. Кривая 2 соответствует идеальному сигналу при отсутствии помех. Кривая 3 получена при реализации предлагаемого способа.
Таким образом, введение новых действий и изменение порядка выполнения во времени и в разных сочетаниях известных действий, обеспечивающих реализацию предлагаемого способа, позволяет достичь повышения отношения сигнал/помеха + шум при приеме электромагнитной волны круговой поляризации биортогональной антенной системой за счет подавления помех, в том числе и подобных по спектру полезному сигналу, в широком секторе углов.
Источники информации
1. Ли У. Техника подвижных систем связи: Пер. с англ. - М.: Радио и связь, 1985.-С.357-373.
2. Связь с подвижными объектами в диапазоне СВЧ/Под ред. У.К. Джейса. Пер. с англ. Под ред. М.С.Ярлыкова и М.В.Чернякова. - М.: Связь, 1979. - 520с.
3. Бабейко А.Л., Бовкун В.П., Брауде С.Я., Мень А.В., Сергиенко Ю.Ю. Интерферометр декаметрового диапазона радиоволн УРАН-1. - В кн.: Антенны. Под ред. А.П.Пистолькорса. - М.: Связь, 1979, вып.26, С. 121-134.
4. Авт. Свид. 1376146 (СССР). Фазированная антенная решетка с круговой поляризацией поля/ Э.П.Абракин, Л.Л.Базеян и А.И.Браженко//1988, БИ №7.
5. Авт. Свид. 1210167 (СССР). Адаптивное антенное устройство// А.П.Родимов, И.В.Кривошеин, А.М.Мавродиев, С.В.Никитин и В.В.Никитченко//1986, БИ №5 - Н 01 Q 21/28.
Бахрах Л.Д., Кременецкий С.Д. Синтез излучающих систем (теория и методы расчета). - М.: Сов. Радио, 1974, 174 с.
ПРИЛОЖЕНИЕ 1
Математическая модель полезного сигнала и сигнала помехи
Используемые обозначения:
А, В - амплитуды соответственно сигнальной и помеховой составляющих;
w, w1 - частоты соответственно сигнальной и помеховой составляющих (w1=w+Δ);
Т - период колебания несущей сигнала;
γ,  - фазы колебаний соответственно сигнальной и помеховой составляющих;
- фазы колебаний соответственно сигнальной и помеховой составляющих;
Δ - уход частоты помехи от частоты сигнала;
rnd(1) - функция, определяющая случайный характер изменения амплитуды помеховой составляющей.
Определение значений
А:=5 В:=6 Т:=1 

Аналитические выражения для сигнала и помехи
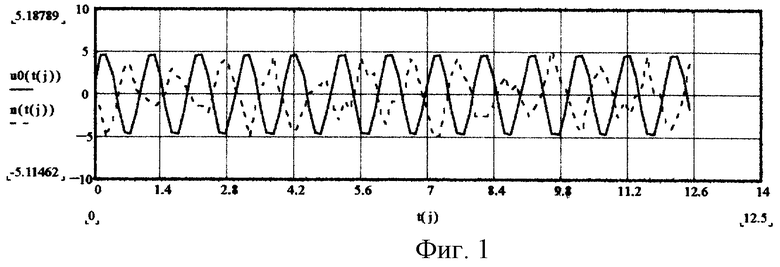
u0(t):=A·sin(w·t+γ)
n(t):=rnd(1)B·sin(w1·t+ )
)
Для заданных параметров функции сигнала и помехи имеют вид
(см. фиг.1).
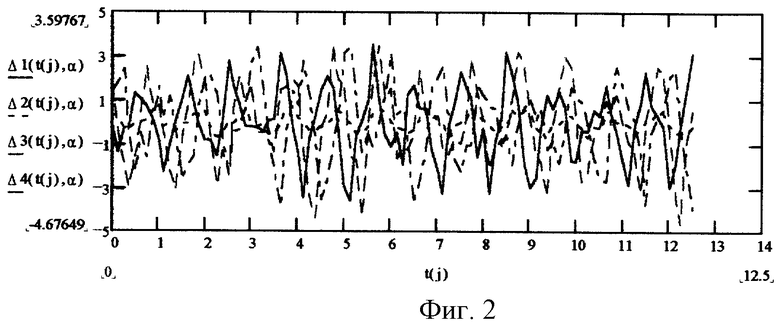
После вычисления отсчетов опорных сигналов могут быть получены зависимости от времени разностных сигналов.
Зависимости разностных сигналов, вычисляемые по формулам (12)-(20) при  представлены на фиг.2 (видно, что все разностные сигналы носят шумовой характер).
представлены на фиг.2 (видно, что все разностные сигналы носят шумовой характер).
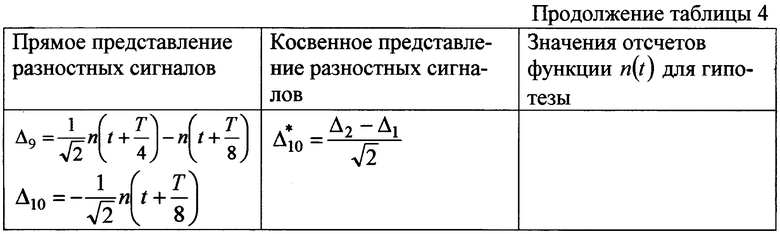
Возможно два представления разностных сигналов:
- прямое представление по формулам, представленным в описании;
- косвенное представление через другие разностные сигналы при условии, что задано значение α.
На основании косвенных представлений могут быть получены значения функции n(t) для каждого из временных отсчетов:  Выражения, устанавливающие взаимосвязь между представлениями разностных сигналов и отсчетами функции n(t) для значений
Выражения, устанавливающие взаимосвязь между представлениями разностных сигналов и отсчетами функции n(t) для значений  представлены в табл.1-4.
представлены в табл.1-4.
Сравнение гипотез
На основании сравнения косвенных и прямых представлений разностных сигналов могут быть получены оценки справедливости каждой из четырех гипотез путем вычисления невязок.
Проверка “гипотезы” 
Проверка “гипотезы” 
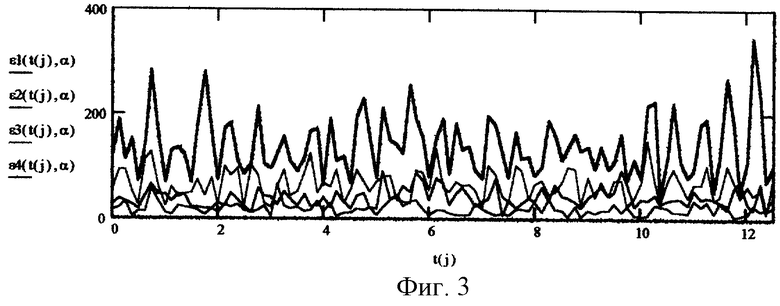
ε2(t,α):=(Δ1(t,0)-Δ1(t,α))2+(Δ2(t,0)-Δ2(t,α))2+(Δ3(t,0)-Δ3(t,α))2+(Δ4(t,0)-Δ4(t,α))2…
+(Δ5(t,0)-Δ5(t,α))2+(Δ6(t,0)-Δ6(t,α))2+(Δ7(t,0)-Δ7(t,α))2+(Δ8(t,0)-Δ8(t,α))2…
+(Δ9(t,0)-Δ9(t,α))2+(Δ10(t,0)-Δ10(t,α))2
Проверка “гипотезы” 
Проверка “гипотезы” 
Графическое представление результатов проверки для случая α=-π/30 представлено на фиг.3. Видно, что наиболее малые значения невязок, как правило, соответствуют гипотезе 2, однако, в ряде случаев наименьшие значения невязок получаются для других гипотез. Поэтому для принятия окончательного решения необходимо провести операцию усреднения полученных невязок. Результаты усреднения представлены на фиг.4. На основании результатов на фиг.4 может быть принято однозначное решение о истинности гипотезы 2. С использованием таблицы 2 для выбранной гипотезы может быть вычислен отсчет функции n(t), на основании которого формируются
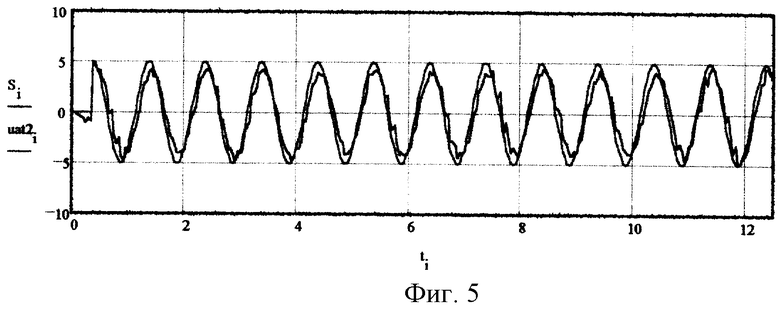
четыре компенсирующих сигнала. После компенсации на выходе устройства, реализующего предлагаемый способ, получаем сигнал, представленный на фиг.5. На данном рисунке для сравнения показан и исходный полезный сигнал. Сравнение фиг.1 и 5 позволяет сделать вывод о работоспособности предлагаемого способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ БИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМОЙ | 2004 |
|
RU2280929C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПРОИЗВОЛЬНО ПОЛЯРИЗОВАННЫХ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКОЙ | 2005 |
|
RU2301483C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ БИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМОЙ | 2008 |
|
RU2368041C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ КРУГОВОЙ ПОЛЯРИЗАЦИИ АНТЕННОЙ РЕШЕТКОЙ ИДЕНТИЧНО ОРИЕНТИРОВАННЫХ ВЕКТОРНЫХ ИЗЛУЧАТЕЛЕЙ | 2006 |
|
RU2330356C1 |
| Способ подавления импульсных помех в N-элементной адаптивной антенной решетке | 2021 |
|
RU2776862C1 |
| Способ обработки сигналов в модульной адаптивной антенной решетке при приеме коррелированных сигналов и помех | 2015 |
|
RU2609792C1 |
| Способ адаптивной обработки сигналов в модульной фазированной антенной решетке | 2016 |
|
RU2629921C1 |
| СПОСОБ КОГЕРЕНТНОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ ПРИЕМЕ ЭЛЕКТРОМАГНИТНОЙ ВОЛНЫ АНТЕННОЙ РЕШЕТКОЙ СО СПАДАЮЩИМ АМПЛИТУДНЫМ РАСПРЕДЕЛЕНИЕМ | 2008 |
|
RU2368044C1 |
| СПОСОБ КОМПЕНСАЦИОННОГО ПОДАВЛЕНИЯ ПОМЕХ В МНОГОКАНАЛЬНОЙ АНТЕННОЙ СИСТЕМЕ | 2007 |
|
RU2349996C1 |
| Способ определения направления на цель цифровой антенной решеткой моноимпульсной радиолокационной станции | 2021 |
|
RU2761106C1 |

Изобретение относится к антенной технике и может быть использовано в радиотехнических системах связи при приеме электромагнитной волны круговой поляризации поля биортогональной антенной системой в условиях воздействия преднамеренных и непреднамеренных помех линейной поляризации, в том числе помех, подобных по спектру полезному сигналу. Техническим результатом является повышение помехоустойчивости радиотехнической системы связи за счет подавления помех, в том числе и подобных по спектру полезному сигналу, в широком секторе углов. Подавление помех предполагает прием электромагнитной волны круговой поляризации с помощью двух биортогональных антенных систем, взаимно развернутых на 45°, преобразование принятых сигналов и формирование на их основе четырех опорных сигналов, попарно пропорциональных тангенциальным составляющим напряженности электромагнитного поля, выравнивание во времени девяти отсчетов опорных сигналов в течение времени 3Т/8 через промежутки времени Т/8 (T - период несущего колебания), формирование десяти разностных сигналов Δi (i = 1,2....,10), получаемых вычитанием отсчетов двух опорных сигналов, амплитуды которых при отсутствии помех равны, нахождение четырех совокунностей гипотетических реализаций помехового сигнала для углов  между тангенциальными компонентами помехового и опережающего опорного сигналов, оценку достоверности и выбор наиболее достоверной из гипотез, формирование на основе последней четырех компенсирующих сигналов и их вычитание из опорных сигналов, выравнивание по фазе полученных откорректированных сигналов в парах и между парами и образование выходного сигнала на основе суммирования сигналов после выравнивания по фазе. 8 ил.
между тангенциальными компонентами помехового и опережающего опорного сигналов, оценку достоверности и выбор наиболее достоверной из гипотез, формирование на основе последней четырех компенсирующих сигналов и их вычитание из опорных сигналов, выравнивание по фазе полученных откорректированных сигналов в парах и между парами и образование выходного сигнала на основе суммирования сигналов после выравнивания по фазе. 8 ил.
Способ подавления помех при приеме электромагнитной волны круговой поляризации биортогональной антенной системой, в том числе и помех, подобных по спектру полезному сигналу, основанный на независимом приеме сигналов каждым плечом биортогональной антенной системы, преобразовании принятых сигналов в сигналы, пропорциональные тангенциальным составляющим напряженности электромагнитного поля, формировании опорного сигнала, компенсации помеховых сигналов, выравнивании фаз сигналов, соответствующих ортогональным компонентам полезного сигнала, и образовании выходного сигнала на основе суммирования выравненных сигналов, отличающийся тем, что осуществляют прием электромагнитной волны круговой поляризации с помощью двух биортогональных антенных систем, развернутых друг относительно друга на угол  формируют из преобразованных сигналов четыре опорных сигнала, которые попарно пропорциональны тангенциальным составляющим напряженности электромагнитного поля, выравнивают во времени девять отчетов опорных сигналов в течение времени, равного 3Т/8, через промежутки времени, равные Т/8, где Т - период несущего колебания, формируют десять разностных сигналов Δi (i=1,2,..., 10), получаемых вычитанием отчетов двух опорных сигналов, амплитуды полезных сигналов которых при отсутствии помех равны, находят четыре совокупности гипотетических реализации помехового сигнала, предполагая, что тангенциальная составляющая напряженности электромагнитного поля помехового сигнала ориентирована для каждой совокупности реализации под углом
формируют из преобразованных сигналов четыре опорных сигнала, которые попарно пропорциональны тангенциальным составляющим напряженности электромагнитного поля, выравнивают во времени девять отчетов опорных сигналов в течение времени, равного 3Т/8, через промежутки времени, равные Т/8, где Т - период несущего колебания, формируют десять разностных сигналов Δi (i=1,2,..., 10), получаемых вычитанием отчетов двух опорных сигналов, амплитуды полезных сигналов которых при отсутствии помех равны, находят четыре совокупности гипотетических реализации помехового сигнала, предполагая, что тангенциальная составляющая напряженности электромагнитного поля помехового сигнала ориентирована для каждой совокупности реализации под углом  соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала, оценивают достоверность каждой из четырех гипотез и выбирают наиболее достоверную из них путем формирования совокупности гипотетических разностных сигналов
соответственно к тангенциальной составляющей электромагнитного поля опережающего опорного сигнала, оценивают достоверность каждой из четырех гипотез и выбирают наиболее достоверную из них путем формирования совокупности гипотетических разностных сигналов  и получения невязок между гипотетическими
и получения невязок между гипотетическими  и реальными Δi разностными сигналами, формируют четыре компенсирующих сигнала, соответствующих выбранной гипотезе, компенсируют помеховые сигналы путем вычитания четырех компенсирующих сигналов из опорных сигналов, образуя четыре откорректированных сигнала, производят выравнивание по фазе откорректированных сигналов в каждой из пар, задерживая опережающий сигнал на четверть периода несущего колебания, и между парами, задерживая на восьмую часть периода несущего колебания сигнал второй биортогональной антенной системы, являющийся опережающим, суммируют сигналы в каждой из пар и между парами, образуя выходной сигнал биортогональных антенных систем.
и реальными Δi разностными сигналами, формируют четыре компенсирующих сигнала, соответствующих выбранной гипотезе, компенсируют помеховые сигналы путем вычитания четырех компенсирующих сигналов из опорных сигналов, образуя четыре откорректированных сигнала, производят выравнивание по фазе откорректированных сигналов в каждой из пар, задерживая опережающий сигнал на четверть периода несущего колебания, и между парами, задерживая на восьмую часть периода несущего колебания сигнал второй биортогональной антенной системы, являющийся опережающим, суммируют сигналы в каждой из пар и между парами, образуя выходной сигнал биортогональных антенных систем.
| Адаптивное антенное устройство | 1981 |
|
SU1210167A1 |
| Многоканальное устройство подавления помех | 1988 |
|
SU1575318A1 |
| АНТЕННАЯ РЕШЕТКА СРЕДСТВ РАДИОСВЯЗИ С УПРАВЛЯЕМОЙ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 1991 |
|
RU2007794C1 |
| СПОСОБ ПОЛУЧЕНИЯ АЗОТНО-ФОСФОРНОГО УДОБРЕНИЯ | 1992 |
|
RU2006494C1 |
| EP 1146662 A, 17.10.2001 | |||
| JP 2002359588 A, 13.12.2002 | |||
| JP 2002232334 A, 16.08.2002 | |||
| EP 1077504 A, 21.02.2001. | |||

