Изобретение относится к гидроакустике и может быть использовано для поиска и обнаружения подводных объектов.
Известна акустооптическая система аналогичного назначения [1], содержащая лазер, формирователь лазерного луча с полой сердцевиной, дефлектор и сканатор. Имеется также гидроакустический приемник, расположенный на оптической оси лазера, преобразователь лазерного излучения и вторичная аппаратура для формирования акустического и оптического изображения подводного объекта.
Недостатками известной системы является последовательный характер формирования изображения подводного объекта и потеря информации о координате, ортогональной направлению регистрации объекта (т.е. в изображении объекта не регистрируется фаза).
От этих недостатков аналога [1] свободна голографическая акустооптическая система визуализации подводных объектов в натурном водоеме, содержащая носитель системы, генератор электрических гармонических колебаний, подключенный к гидроакустическому излучателю звуковых волн, приемную гидроакустическую антенну, выполненную в виде пространственно ориентированных цепочек гидрофонов, многоканальный блок обработки сигналов, генератор опорного напряжения, блок стробирования по дальности, блок синхронизации, коммутатор каналов, видеоусилитель, электронно-лучевая трубка с блоками развертки, мишень которой оптически согласована через оптическую систему с одним из выходов лазера и выполнена из материала, показатель преломления которого уменьшается в соответствии с плотностью падающих на нее электронов, при этом выходы приемной гидроакустической антенны подключены через многоканальный блок обработки сигналов к коммутатору каналов, синхронизирующий вход которого подключен к блокам развертки электронно-лучевой трубки, а выход - к видеоусилителю, соединенному выходом с основным входом электронно-лучевой трубки, причем генератор опорного напряжения, блок стробирования по дальности и блок синхронизации соединены с входами многоканального блока обработки сигналов, а блок синхронизации дополнительно подключен к генератору гидроакустического излучателя [2].
Данная система принята за прототип.
Недостатком прототипа является невозможность его работы в двух режимах получения изображения: в режиме поиска объекта, когда изображение получается не совсем четким при значительном охвате пространства поиска и в режиме обследования объекта, при получении достаточно четкого его изображения (объект к этому времени уже найден).
Техническим результатом, получаемым от внедрения изобретения, является устранение данного недостатка прототипа, т.е. получение возможности работы системы в двух режимах: режиме поиска, при широкой диаграмме направленности гидрофонов приемной гидроакустической антенны и режиме обследования подводного объекта, при узкой (лучевой) диаграмме направленности гидрофонов антенны с получением более четкого изображения подводного объекта.
Данный технический результат получают за счет того, что в известной голографической акустооптической системе визуализации подводных объектов в натурном водоеме, содержащей носитель системы, генератор электрических гармонических колебаний, подключенный к гидроакустическому излучателю звуковых волн, приемную гидроакустическую антенну, выполненную в виде пространственно ориентированных цепочек гидрофонов, многоканальный блок обработки сигналов, генератор опорного напряжения, блок стробирования по дальности, блок синхронизации, коммутатор каналов, видеоусилитель, электронно-лучевая трубка с блоками развертки, экран которой оптически согласован через оптическую систему с одним из выходов лазера и выполнена из материала, показатель преломления которого изменяется в соответствии с плотностью падающих на нее электронов, при этом выходы приемной гидроакустической антенны подключены через многоканальный блок обработки сигналов к коммутатору каналов, синхронизирующий вход которого подключен к блокам развертки электронно-лучевой трубки, а выход - к видеоусилителю, соединенному выходом с основным входом (катодом) электронно-лучевой трубки, причем генератор опорного напряжения, блок стробирования по дальности и блок синхронизации соединены с входами многоканального блока обработки сигналов, а блок синхронизации дополнительно подключен к генератору гидроакустического излучателя, гидрофоны приемной гидроакустической антенны выполнены в виде волоконно-оптических интерферометров, сигнальные и опорные волоконные катушки которых расположены друг за другом в вертикальных плоскостях на определенном расстоянии друг от друга, совместно образуя последовательности сигнальных и опорных волоконных катушек, лежащих в параллельных горизонтальных плоскостях, при этом выход каждого интерферометра оптически согласован со своим фотоприемником, подключенным выходом к многоканальному блоку обработки сигналов, а входы всех интерферометров через дополнительную оптическую систему оптически согласованы со вторым выходом лазера, причем приемная гидроакустическая антенна дополнительно содержит управляемый пневмоаккумулятор, пневмовыходы которого установлены между последовательностями сигнальных и опорных волоконных катушек впереди по ходу движения гидроакустической антенны.
Изобретение поясняется чертежами, на фиг.1 которого представлена общая схема системы, а на фиг.2 - ее оптикоэлектронная схема.
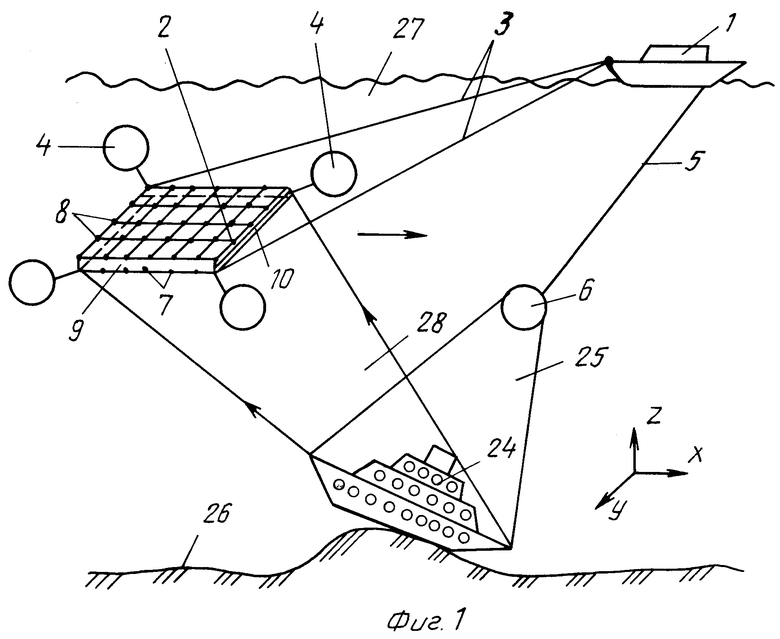
Голографическая акустооптическая система (ГАОС) визуализации подводных объектов (фиг.1) содержит носитель 1 системы, например, надводное судно, к корме которого прикреплены приемная гидроакустическая антенна 2 с помощью кабель-тросов 3. Антенна 2 снабжена поплавками 4, ориентирующими ее положение в горизонтальной плоскости.
К носителю 1 ГАОС прикреплен на кабель-тросе 5 гидроакустический излучатель 6, подключенный к генератору электрических гармонических колебаний (не показан).
Приемная гидроакустическая антенна 2 выполнена в виде пространственно ориентированных в горизонтальных плоскостях последовательностей сигнальных (7) и опорных катушек 8, оптически согласованных в волоконно-оптические интерферометры, например, собранных по схеме Маха-Цендера. Каждая сигнальная и опорная катушки 7, 8 интерферометров пространственно ориентированы в вертикальных, расположенных на определенном расстоянии друг от друга плоскостях. Таким образом, образуются две последовательности волоконных катушек (сверху опорные 8, снизу сигнальные 7), расположенные в двух параллельных плоскостях, между которыми находится сквозной канал 9.
Конкретное выполнение конструкции гидроакустической антенны представляет собой НОУ-ХАУ заявителя.
ГАОС включает в себя также пневмоаккумулятор (не показан), расположенный, например, в одном из поплавков 4. Пневмоаккумулятор с помощью пневмопровода 10 с отверстиями (последние не показаны) пневматически согласован со сквозным каналом 9. Если гидроакустическая антенна 2 буксируется носителем 1 в направлении стрелки, показанной на фиг.1, то пневмопровод 10 с отверстиями (пневмовыходы) устанавливаются между последовательностями сигнальных (7) и опорных (8) катушек впереди по ходу движения гидроакустической антенны 2. Гидроакустическая антенна 2 может включать в себя N фазосдвигающих устройств (не показаны), установленных в одной из волоконных катушек 7 или 8.
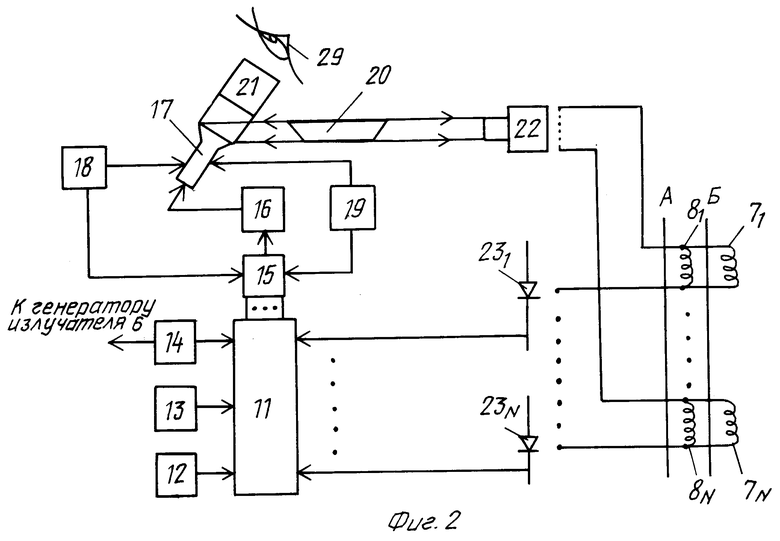
Электронные блоки ГАОС, представленные на фиг.2, включают в себя многоканальный блок 11 обработки сигналов, генератор 12 опорного напряжения, блок 13 стробирования по дальности, блок 14 синхронизации, коммутатор 15 каналов, видеоусилитель 16 и электронно-лучевую трубку (ЭЛТ) 17 с блоками 18, 19 развертки.
Схема соединений блоков 11... 19 представлена на фиг.2. Данная схема для ясности изложения полностью взята из прототипа [2], хотя могла бы быть выполнена на современной электронной базе с компьютером. Ввиду известности электронной схемы более подробно (до уровня схемотехники) она не раскрывается.
Оптическая часть схемы на фиг.2 включает в себя мощный непрерывный лазер 20, например, аргоновой, два выхода которого оптически согласованы с мишенью ЭЛТ 17 и оптической системой 21, а также через оптическую систему 22 с входами волоконно-оптических интерферометров, сигнальные (71...7N) и опорные (81...8n) волоконные катушки которых обозначены под теми же позициями, что и на фиг.1.
Выходы интерферометров оптически согласованы с фотоприемниками 231 ...23N (фиг.2). При этом выходы N фотоприемников, являющиеся в данном случае выходами гидроакустической антенны 2, подключены к входам многоканального блока 11 обработки сигналов.
Все электронные и оптикоэлектронные блоки ГАОС располагаются на носителе 1. Часть блоков может быть расположена и в поплавках 4 гидроакустической антенны 2. Таким образом, в воде располагаются только волоконные катушки 71 ...7N, 81 ...8N и гидроакустический излучатель 6. На фиг.2 по линии А условно обозначен водораздел между элементами 7, 8 и остальной частью ГАОС. Связь между надводной и подводной частями ГАОС осуществляется через оптические и электрические кабели, представляющие собой одно целое с кабель-тросами 3, 5.
Мишень ЭЛТ 17 может быть выполнена обычной. В этом случае необходима фоторегистрация получаемой на ней интерференционной картины с последующим восстановлением зафиксированной голограммы с помощью лазера.
Однако для проведения подводных исследований в реальном масштабе времени мишень ЭЛТ 17 выполняют как в прототипе из материала, показатель преломления которого изменяется в соответствии с плотностью падающих на мишень электронов.
Голографическая акустооптическая система визуализации подводных объектов в натурном водоеме работает следующим образом.
В режиме поиска подводного объекта 24 (фиг.1) с блока управления на пневморегулятор (на чертеже данные блоки не представлены) направляется командный сигнал на открытие пневмоклапана пневмоаккумулятора. Из отверстий пневмопровода 10 в сквозной канал 9 между последовательностями волоконных катушек 7, 8 поступают воздушные пузырьки.
Поскольку антенна 2 буксируется по направлению стрелки носителем 1, пузырьки будут сноситься вниз по течению и полностью перекрывать опорные волоконные катушки 81...8N от воздействия звуковых волн. Между катушками 7, 8 появляется звукопоглощающий экран Б (фиг.2). В это же время на гидроакустический излучатель 6 направляются гармонические колебания частотой несколько десятков или сотен килогерц.
Когерентные звуковые волны 25, генерируемые излучателем 6, начинают облучать дно 26 натурного водоема 27.
При попадании зоны облучения звуковыми волнами 25 на звукоотражающий подводный объект 24, отраженные от объекта 24 звуковые волны 28, распространяются к гидроакустической антенне 2.
Гидроакустическая антенна 2 в это время работает в режиме широкой диаграммы направленности, когда каждая пара 7, 8 сигнальных и опорных катушек, представляющих собой гидрофон (приемник гидроакустического давления) с широкой диаграммой направленности. Данный режим работы антенны представляет собой режим поиска подводного объекта. При таком режиме работы гидроакустической антенной 2 обследуется одновременно значительная по площади зона морского дна 26, но изображение объекта 24 будет выглядеть нечетким и размытым на экране ЭЛТ 17 в силу наличия у каждого приемного элемента антенны широкой диаграммы направленности.
Когда подводный объект 24 будет найден, гидроакустическая антенна 2 переводится в режим работы с узкой диаграммой направленности ее элементов. Для этого на пневмоаккумулятор с носителя 1 направляется командный сигнал на прекращение подачи воздушных пузырьков в сквозной канал 9. А носитель 1 останавливается над объектом 24.
При этом звукопоглощающий экран Б из воздушных пузырьков будет отсутствовать (фиг.2) и когерентные звуковые волны 28 будут последовательно воздействовать сначала на сигнальную (7), затем на опорную (8) катушки интерферометров гидроакустической антенны 2.
В таком режиме работы волоконно-оптические интерферометры превращаются в векторные приемники, характеризующиеся остронаправленной (лучевой) диаграммой направленности.
При этом гидроакустическая антенна 2 сужает "свое поле видимости", но повышает пространственное разрешение до порядков размеров длины волны когерентных звуковых волн 28.
Обработка выходных сигналов с гидроакустической антенны 2 происходит по аналогии с прототипом.
Выходные сигналы с фотоприемников 231...23N подвергаются предварительному усилению в многоканальном блоке 11 предварительной обработки сигналов. Затем усиленные сигналы смешиваются с электрическими опорными колебаниями, поступающими от блока 12 опорных напряжений.
Интерференция между выходными сигналами с фотоприемников 231...23N и опорными колебаниями происходит непосредственно в многоканальном блоке 11 обработки сигналов.
Фазочувствительные детекторы (не обозначены) блока 11 выделяют разности фаз смешиваемых колебаний и вырабатывают на своих выходах напряжения, пропорциональные их разностям.
Схема 13 стробирования по дальности пропускает сигналы, поступающие только из заданного сечения по глубине водоема 27. Таким образом, достигается разрешение изображения подводного объекта 24 по координате Z, ортогональной плоскости его изображения х, у, при этом также повышается помехоустойчивость регистрации изображения объекта.
Коммутация каналов приемного тракта ГАОС проводится блоком 15 коммутации каналов синхронно с растровой разверткой луча ЭЛТ по координатам х, у. Для этого используется блок 14 синхронизации, который одновременно синхронизирует работу электронных блоков 11, 15, 16, 17 с работой генератора гидроакустического излучателя 6.
После усиления в видеоусилителе 16 сигналы поступают на ЭЛТ 17. Голограмма с экрана ЭЛТ 17 используется для непосредственного восстановления изображения подводного объекта 24 с помощью оптической системы 21 и глаза 29 оператора или фотографируется для последующего его восстановления. (В последнем случае лучше использовать обычную ЭЛТ с яркостной индикацией).
При непосредственном восстановленнии голограммы служит, как в прототипе, специальная ЭЛТ с мишенью из материала, в котором под воздействием падающих на мишень электронов происходит местное изменение показателя преломления. Распределение показателей преломления на мишени после полного цикла опроса каналов приемного тракта отображает голограмму подводного объекта 24.
При облучении мишени ЭЛТ источником опорных колебаний (лазером 20) его лучи будут преломляться и отражаться, модулируясь по фазе в соответствии с законом, заложенным в голограмму подводного объекта 24. Изображение объекта 24 наблюдается через оптическую систему 21 (зрительная труба).
Частота гидроакустического излучателя 6 выбирается конкретно из компромиссов между пространственным разрешением, коэффициентом поглощения звуковых волн морской водой и приемлемой шириной сквозного канала 9, задающего расстояние между последовательностями сигнальных (7) и опорных (8) волоконных катушек приемной гидроакустической антенны 2.
Таким образом, в отличие от прототипа заявленная ГАОС позволяет работать в двух режимах: в режиме поиска и в режиме обследования подводного объекта. Что повышает ее эффективность при работе в натурном водоеме.
Источники информации
1. Патент РФ №2141676, кл. G 01 S 3/80,1999.
2. А.П.Евтюгов, А.Е.Колесников и др. "Справочник по гидроакустике". Л.: "Судостроение", 1988, стр. 35-38, рис.1.14 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВЕРХЧУВСТВИТЕЛЬНАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА НА ОСНОВЕ ВОЛОКОННО-ОПТИЧЕСКИХ ГИДРОФОНОВ, ИСПОЛЬЗУЮЩАЯ МНОГОЭЛЕМЕНТНЫЕ ПРИЁМНИКИ | 2016 |
|
RU2627966C1 |
| ПОДВОДНОЕ РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2214656C2 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА ДЛЯ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМУЮ МОРСКУЮ АКВАТОРИЮ | 2000 |
|
RU2172000C1 |
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИДРОФОН | 1996 |
|
RU2112229C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВОДНОГО САМОДВИЖУЩЕГОСЯ ОБЪЕКТА | 2002 |
|
RU2226702C1 |
| ДВУХКОЛЬЦЕВОЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ГИДРОФОН | 1994 |
|
RU2106072C1 |
| ГИДРООПТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2193213C1 |
Изобретение относится к гидроакустике и может быть использовано для поиска и обнаружения подводных объектов в натурном водоеме. Техническим результатом является получение возможности работы системы в двух режимах: режиме поиска, при широкой диаграмме направленности гидрофонов приемной гидроакустической антенны и режиме обследования подводного объекта, при узкой диаграмме направленности гидрофонов антенны с получением более четкого изображения подводного объекта. Устройство содержит носитель системы, генератор электрических гармонических колебаний, гидроакустический излучатель звуковых волн, приемную гидроакустическую антенну, многоканальный блок обработки сигналов, генератор опорного напряжения, блок стробирования по дальности, блок синхронизации, коммутатор каналов, видеоусилитель, лазер, электронно-лучевую трубку с блоками развертки, причем гидрофоны приемной гидроакустической антенны выполнены в виде волоконно-оптических интерферометров, сигнальные и опорные волоконные катушки которых расположены друг за другом в вертикальных плоскостях, совместно образуя последовательности сигнальных и опорных волоконных катушек, лежащих в параллельных горизонтальных плоскостях на определенном расстоянии друг от друга, при этом выход каждого интерферометра оптически согласован со своим фотоприемником, подключенным выходом к многоканальному блоку обработки сигналов, а входы всех интерферометров через дополнительную оптическую систему согласованы со вторым выходом лазера, причем приемная гидроакустическая антенна дополнительно содержит управляемый пневмоаккумулятор, пневмовыходы которого установлены между последовательностями сигнальных и опорных волоконных катушек спереди по направлению перемещения гидроакустической антенны носителем. 2 ил.
Голографическая акустооптическая система визуализации подводных объектов в натурном водоеме, содержащая носитель системы, генератор электрических гармонических колебаний, подключенный к гидроакустическому излучателю звуковых волн, приемную гидроакустическую антенну, выполненную в виде пространственно ориентированных цепочек гидрофонов, многоканальный блок обработки сигналов, генератор опорного напряжения, блок стробирования по дальности, блок синхронизации, коммутатор каналов, видеоусилитель, лазер, электронно-лучевая трубка с блоками развертки, мишень которой выполнена из материала, показатель преломления которого изменяется в соответствии с плотностью падающих на мишень электронов, оптически согласованная через оптическую систему с одним из выходов лазера, при этом выходы приемной гидроакустической антенны подключены через многоканальный блок обработки сигналов к коммутатору каналов, синхронизирующий вход которого подключен к блокам развертки электронно-лучевой трубки, а выход - к видеоусилителю, соединенному выходом с основным входом электронно-лучевой трубки, причем генератор опорного напряжения, блок стробирования по дальности и блок синхронизации соединены с входами многоканального блока обработки сигналов, а блок синхронизации дополнительно подключен к генератору гидроакустического излучателя, отличающийся тем, что гидрофоны приемной гидроакустической антенны выполнены в виде волоконно-оптических интерферометров, сигнальные и опорные волоконные катушки которых расположены друг за другом в вертикальных плоскостях, совместно образуя последовательности сигнальных и опорных волоконных катушек, лежащих в параллельных горизонтальных плоскостях на определенном расстоянии друг от друга, при этом выход каждого интерферометра оптически согласован со своим фотоприемником, подключенным выходом к многоканальному блоку обработки сигналов, а входы всех интерферометров через дополнительную оптическую систему согласованы со вторым выходом лазера, причем приемная гидроакустическая антенна дополнительно содержит управляемый пневмоаккумулятор, пневмовыходы которого установлены между последовательностями сигнальных и опорных волоконных катушек спереди по направлению перемещения гидроакустической антенны носителем.
| ЕВТЮГОВ А.П | |||
| и др | |||
| Справочник по гидроакустике | |||
| - Л.: Судостроение, 1988, с.35-38, рис.1.14 | |||
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ АНТЕННА ДЛЯ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ НА ОХРАНЯЕМУЮ МОРСКУЮ АКВАТОРИЮ | 2000 |
|
RU2172000C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2105992C1 |
| US 4991149 А, 05.02.1991 | |||
| US 3507553 A, 21.04.1970 | |||
| US 5070733 А, 10.12.1991 | |||
| US 4115753 A, 19.09.1978. | |||

