Изобретение относится к области гидроакустики и может быть использовано для контроля глубины погружения, скорости подьема и погружения подводного объекта, а также определения его местоположения относительно подводной базы с помощью гидроакустических маяков.
Известно устройство аналогичного назначения, принятое за прототип [1].
Известное устройство содержит гидроакустический маяк, расположенный на известном расстоянии от подводной базы объекта, и волоконно-оптический пеленгатор, расположенный на подводном объекте (водолаз, аквалангист, батискаф и т.п.)
Пеленгатор в известном устройстве выполнен в виде источника когерентного света и фотоприемника, оптически согласованных с предметной и опорной волоконными катушками в интерферометр. При этом фотоприемник подключен через усилитель к индикатору.
Опорная и предметная волоконные катушки в прототипе расположены соосно и выполнены с плотностью намотки витков, подчиняющейся синусоидальному закону. При этом витки предметной и опорной катушек пространственно сдвинуты относительно друг друга на половину периода намотки в направлении оси катушек.
При такой конструкции пеленгатора максимум выходного сигнала фотоприемника интерферометра будет наблюдаться в момент совпадения оси катушек и направления прихода звуковой волны от гидроакустического маяка.
Недостатком прототипа является сложность намотки волоконных катушек по синусоидальному закону плотности расположения витков, а также определения правильной ориентации пеленгатора на гидроакустический маяк по максимальному, а не нулевому значению выходного сигнала. Кроме того, подобная конструкция пеленгатора приводит к необходимости использования сильно вытянутого вперед чувствительного волоконно-оптического элемента, что затрудняет пространственную маневренность подводного объекта в океане.
Наконец, с помощью прототипа невозможно определение таких важных параметров подводного объекта, как его пространственные горизонтальные и вертикальные координаты, а также скорости подъема и погружения объекта.
Техническим результатом, получаемым от внедрения изобретения, является устранение перечисленных выше недостатков прототипа. То есть упрощение конструкции устройства и формы чувствительного элемента пеленгатора, что повышает маневренность подводного объекта, а также получение дополнительной информации о пространственных координатах объекта и скорости его подъема и погружения.
Данный технический результат получают за счет того, что в известной волоконно-оптической информационной системе для подводного самодвижущегося объекта, содержащей гидроакустический маяк, расположенный на известном расстоянии от подводной базы объекта, и пеленгатор, выполненный в виде источника когерентного света и фотоприемника, оптически согласованных с предметной и опорной волоконными катушками в интерферометр, при этом фотоприемник подключен через усилитель к индикатору, дополнительно введены второй гидроакустический маяк, расположенный симметрично относительно первого маяка по отношению к подводной базе, при этом предметная волоконная катушка выполнена в форме полусферы с равномерной намоткой витков.
Устройство дополнительно содержит фазосдигающее устройство, расположенное в одной из волоконных катушек.
Система также содержит два дополнительных гидроакустических маяка, симметрично расположенных относительно подводной базы объекта на линии, ортогональной линии, соединяющей два первых маяка и подводную базу объекта.
Индикатор системы выполнен в виде параллельно соединенных частотомера, измерителя фототока и головного телефона.
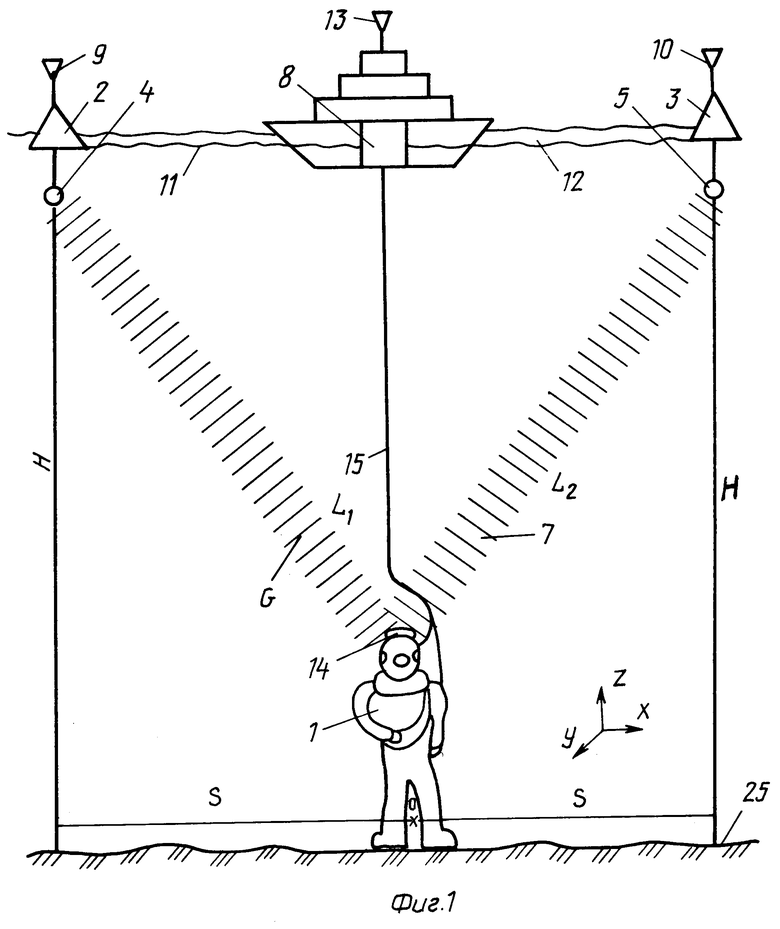
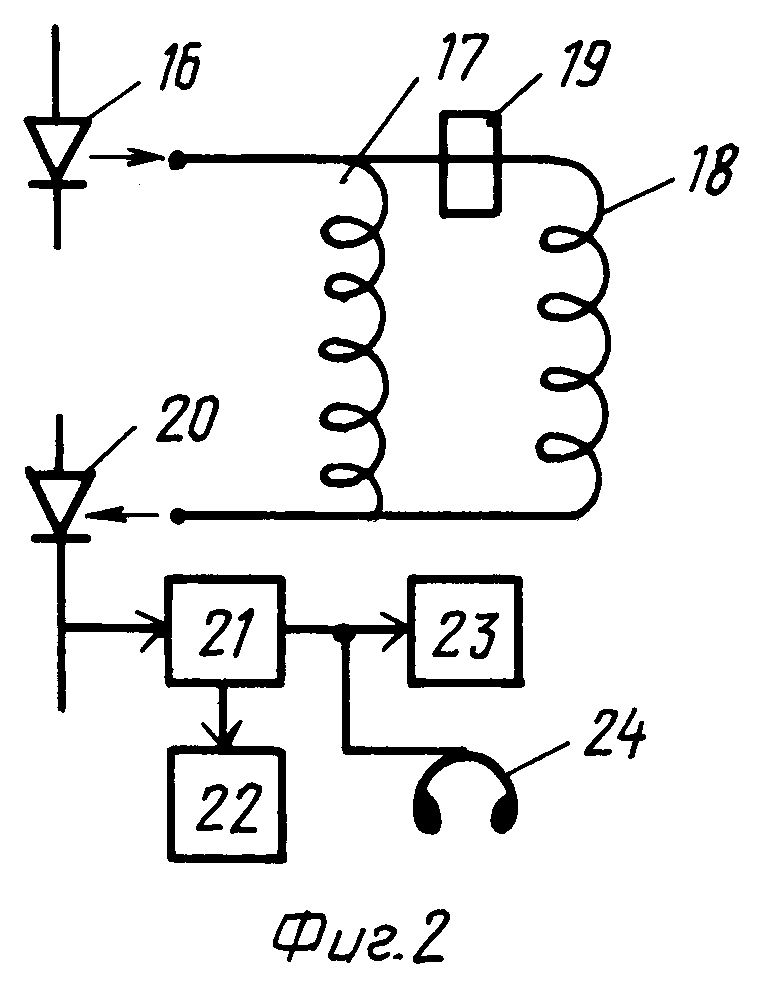
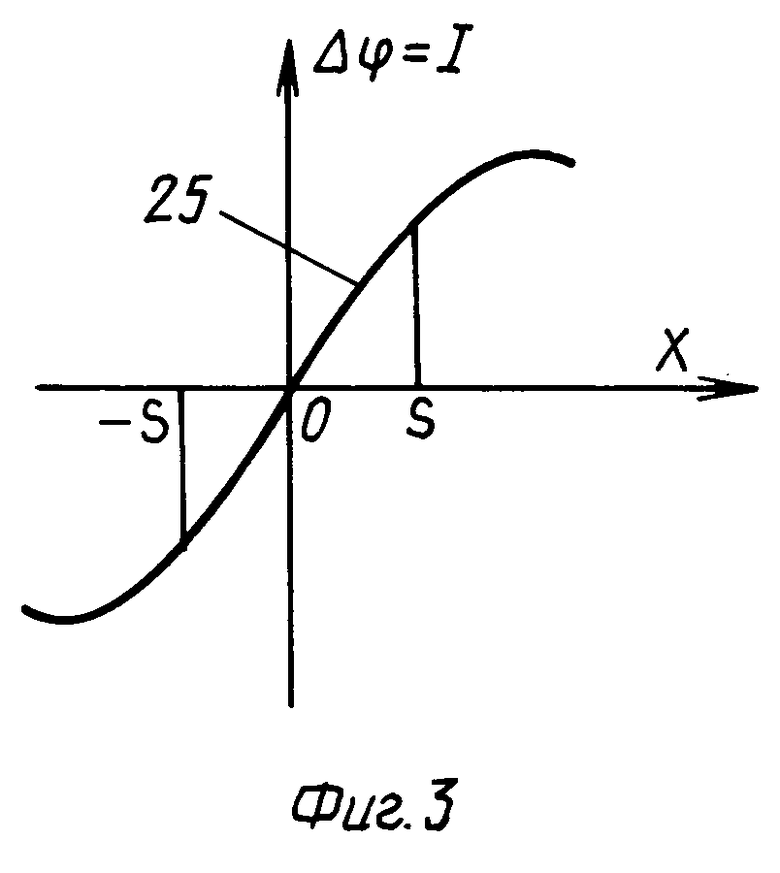
Изобретение поясняется чертежами: на фиг.1 представлена общая схема реализации информационной системы на примере водолаза; на фиг.2 - оптико-электронная схема пеленгатора системы; на фиг.3 - пространственная диаграмма, поясняющая работу системы.
Волоконно-оптическая информационная система (ВОИС) для подводного самодвижущегося объекта, например, водолоза 1 (фиг.1) содержит два гидроакустических маяка 2, 3 с излучателями 4, 5 гидроакустических гармонических сигналов 6, 7. Маяки расположены симметрично относительно подводной базы измерения (на чертеже подводная часть судна 8) и снабжены передатчиками с радиоантеннами 9, 10.
Система также может быть снабжена еще двумя гидроакустическими маяками (на чертеже не показаны), расположенными в плоскости ху на ортогональной линии, соединяющей гидроакустические маяки 2, 3. Маяки могут быть закреплены с помощью якорей (на чертеже не показаны).
Связь гидроакустических маяков с судном осуществляется по кабель-тросам 11, 12 и радиоканалу с помощью приемной радиоантенны 13, расположенной на судне 8, и передающих радиоантенн 9, 10, расположенных на гидроакустических маяках 2, 3.
С водолазом 1 связан волоконно-оптический пеленгатор 14, расположенный, например, на шлеме водолаза, как показано на чертеже.
Связь водолаза 1 с подводной базой на судне 8 осуществляется, например, по кабель-тросу 15.
Волоконно-оптический пеленгатор 14 выполнен в виде оптически согласованных в интерферометре источника 16 когерентного света (фиг.2) опорной (17) и предметной (18) волоконных катушек, фазосдвигающего устройства 19 и фотоприемника 20.
Выход фотоприемника 20 соединен через усилитель 21 с индикаторами, выполненными в виде частотомера 22 (счетчика импульсов), измерителя величины фототока I 23 и головного телефона 24.
Предметная волоконная катушка 18 располагается в морской среде, опорная катушка 17 изолирована от морской среды.
ВОИС работает следующим образом.
При опускании водолаза 1 на дно 25 водоема (фиг.1) изменяющаяся величина гидростатического давления воздействует на предметную волоконную катушку 18, и на выходе частотомера и измерителя количества импульсов 22 появляются сигналы, соответствующие глубине Н погружения и скорости погружения водолаза. При этом на головном телефоне 24 водолаза 1 присутствует акустический сигнал, тон которого зависит от скорости погружения.
При постановке водолаза на дно 25 тумблером (на чертеже не показан) частотомер 22 отключают и подключают измеритель 23 фототока I. И с помощью фазосдвигающего устройства 19 (фиг.2) устанавливают начальную разность фаз интерферирующих лучей равной 90°, что контролируют по максимальному уровню шумов на выходе головных телефонов 24.
Включают гидроакустические маяки 2, 3, излучающие в воду акустические сигналы 6, 7 (фиг.1).
Если водолаз 1 с пеленгатором 14 находится в точке О, то расстояния L1 и L2 будут одинаковыми и сигнал на выходе пеленгатора 14 (фотоприемника 20) будет нулевым, поскольку разность фаз Δϕ акустических лучей будет нулевой. При смещении водолоза 1 вдоль оси x на выходе фотоприемника 20 появится фототок величиной I из-за появления разности фаз Δϕ, вызванной разностью путей L1 и L2, проходимых акустическими волнами от излучателей 4, 5 до предметной катушки 18 пеленгатора.
Если разность фаз не превышает величины Δϕ=45°, то зависимость 25 (фиг.3) величины фототока 1 от смещения S водолаза от точки О будет квазилинейной.
При этом величина сигнала I не изменяется, если водолаз будет двигаться ортогонально оси x (вдоль оси y), если отсутствуют дополнительные гидроакустические маяки, кроме имеющихся на чертеже. Таким образом, с помощью ВОИС задается направление движения подводного объекта строго в требуемом направлении. С другой стороны, смещение S водолаза 1 от заданного направления контролируется по величине фототока I.
Если требуется задать азимут движения водолаза 1 в направлении x, то включают вторую пару гидроакустических маяков (на чертеже не показаны).
При подъеме водолаза 1 на судно 8 важно соблюдать режим декомпрессии, для чего необходимо контролировать скорость подъема водолаза. Для этого снова включают частотомер 22 и выключают измеритель 23 фототока. При подъеме уменьшается величина гидростатического давления, воздействующего на предметную волоконную катушку 18. На выходе фотоприемника 20 появляются импульсы, частота следования которых пропорциональна скорости подъема. Водолаз слышит появление данного сигнала в головных телефонах 24 и видит его значение по показаниям частотомера 22 и дает соответствующую команду на судно 8.
Таким образом, в отличие от прототипа подводная часть ВОИС проще, а значит, и легче по сравнению с известной, что немаловажно для маневренности подводного объекта, например водолаза.
Заявленная система позволяет задавать азимутальное направление движения объекта по нулевому сигналу, что значительно удобнее для физиологического восприятия полезного сигнала, например, с помощью наушников.
Заявленная ВОИС позволяет определять координаты объекта относительно условной наперед заданной точки, что невозможно с помощью прототипа.
Наконец, заявленная система позволяет определять глубину погружения и подъема подводного объекта, а также скорость его погружения и подъема. Знание этих величин позволяет сохранить здоровье и жизнь, например, водолазов и аквалангистов.
Источник информации
1. Патент №2105990 РФ, кл. G 01 S 3/80, 1998 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОГО МАЯКА | 2002 |
|
RU2223513C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ОКЕАНЕ | 1995 |
|
RU2105955C1 |
| ПОРТАТИВНАЯ ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2002 |
|
RU2233458C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 2004 |
|
RU2271617C1 |
| СИСТЕМА ДЛЯ ТРАЛОВОГО РЫБОПРОМЫСЛА | 2002 |
|
RU2238644C2 |
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИНТЕРФЕРОМЕТР САНЬЯКА ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 1994 |
|
RU2107282C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ МОРСКОГО ТЕЧЕНИЯ | 2004 |
|
RU2297007C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2236690C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ПОДВОДНЫХ ТЕЧЕНИЙ | 1994 |
|
RU2105985C1 |
Изобретение относится к гидроакустике и может быть использовано для контроля глубины и скорости погружения (подъема) подводного объекта, а также заданий азимутального направления движения объекта и определения его пространственных координат. Техническим результатом является упрощение конструкции чувствительного элемента пеленгатора, что повышает маневренность подводного объекта. Сущность изобретения заключается в том, что с помощью, по крайней мере, двух гидроакустических маяков, расположенных симметрично относительно подводной базы объекта, задают азимутальное направление, контролируемое по нулевому сигналу волоконно-оптического пеленгатора, выполненного в виде источника когерентного света и фотоприемника, оптически согласованных с волоконными предметной и опорной катушками. При подъеме или опускании подводного объекта глубина и скорость подъема (погружения) контролируются соответственно по количеству и частоте импульсов фототока. 3 з.п. ф-лы, 3 ил.
| ВОЛОКОННО-ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ НА ГИДРОАКУСТИЧЕСКИЙ МАЯК | 1996 |
|
RU2105990C1 |
| ПОРТАТИВНЫЙ ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 2000 |
|
RU2176091C1 |
| Способ регистрации акустической волны | 1991 |
|
SU1818604A1 |
| US 4115753, 19.09.1978 | |||
| US 4648082, 03.03.1987. | |||

