Изобретение относится к устройствам для транспортировки и укладки листов и может быть использовано в различных отраслях промышленности, где изготавливаются и/или используются листовые материалы, в частности в металлургической, металлообрабатывающей, деревообрабатывающей, химической, целлюлозно-бумажной и других отраслях промышленности.
Известно устройство для транспортировки и укладки листов, содержащее подающий узел, камеру разрежения с окном в ее нижнем торце и эжектором (вентилятором), огибающий камеру транспортер и сопло для подачи воздуха, расположенное под окном камеры разрежения и подключенное к дополнительному вентилятору (авт. св. СССР №1342851, В 65 Н 29/32, заявл. 05.05.86, опубл. 07.10.87, БИ №37).
Использование в известном устройстве нагнетания воздуха в камеру разрежения для отрыва листа вызывает дополнительные энергозатраты на работу устройства и вместе с тем усложняет конструкцию и увеличивает габариты и вес устройства за счет введения в него сопла с дополнительным вентилятором. Кроме того, недостатком известного устройства является высокий уровень энергозатрат на укладку и транспортировку листов, обусловленный тем, что в процессе перемещения листа под камерой разрежения нижний торец последней остается открытым и через него постоянно эжектируется воздух. В таких условиях для создания над движущимся листом заданной степени разрежения, необходимой для его удержания под камерой разрежения, требуется высокая скорость воздушного потока и, соответственно, большой объемный расход воздуха, а значит, и большая производительность вентилятора, требующая высоких энергозатрат, и обуславливающая большие габариты и большой вес вентилятора с его приводом, что в конечном итоге ухудшает энергетические, габаритные и весовые показатели устройства.
Наиболее близким к предлагаемому устройству по технической сущности является принятое за прототип устройство для транспортировки и укладки листов, содержащее механизм для подачи листов, камеру разрежения с приводным транспортером и эжектором, подъемный стол для укладки листов, установленный под камерой разрежения, и воздушный коллектор, расположенный над камерой разрежения и подключенный ко входу эжектора, при этом камера разрежения выполнена в виде продольного относительно направления движения листа ряда секций, каждая из которых имеет две продольные и две поперечные относительно указанного направления боковые стенки и накрывающую их верхнюю стенку с выпускным окном, сообщающим внутреннюю полость секции с воздушным коллектором, и снабжена запорным клапаном, установленным на ее верхней стенке с возможностью перекрытия выпускного окна последней, при этом запорный клапан каждой секции камеры разрежения снабжен приводом, выполненным с возможностью открытия запорного клапана в конце перекрытия секции камеры разрежения движущимся листом и закрытия указанного клапана после отрыва листа от камеры разрежения - при работе устройства в режиме укладки листов или перед выходом движущегося листа из-под указанной секции - при работе устройства в режиме транспортировки листов (патент США №3845950, кл. В 65 Н 29/32, заявл. 25.08.1971 г., опубл. 05.11.1974 г.).
Недостатком известного устройства является возможность поперечного прогиба и остаточной деформации листов, причем указанная возможность усиливается с увеличением ширины укладываемых и транспортируемых листов и, соответственно, ширины камеры разрежения устройства. Другим недостатком известного устройства является то, что все секции его камеры разрежения обслуживаются одним общим эжектором (вентилятором), что обуславливает необходимость использования в известном устройстве вентилятора большой производительности, склонного к выходу на помпажный режим и имеющего большую массу и габариты при высоком энергопотреблении. В свою очередь, склонность вентилятора к выходу на помпажный режим снижает надежность работы устройства и требует установки в известном устройстве антипомпажных технических средств, что усложняет конструкцию устройства.
Технической задачей изобретения является исключение возможности поперечного прогиба и остаточной деформации листов и обеспечение возможности использования в устройстве вентиляторов малой производительности с низким энергопотреблением, исключающих возможность их выхода на помпажный режим.
Техническим результатом изобретения является сохранение кондиционности укладываемых и транспортируемых листов за счет исключения возможности их поперечного прогиба и остаточной деформации, а также повышение экономичности работы вентилятора за счет снижения энергопотребления и повышение его надежности за счет исключения возможности выхода вентилятора на помпажный режим. Кроме того, техническим результатом изобретения является также снижение габарита и веса вентилятора за счет использования в устройстве вентиляторов малой производительности, а также упрощение конструкции устройства за счет исключения необходимости установки на нем антипомпажных технических средств, исключающих выход вентилятора на помпажный режим.
Технический результат изобретения достигается тем, что в предлагаемом устройстве для транспортировки и укладки листов, содержащем механизм для подачи листов, камеру разрежения с приводным транспортером и эжектором, подъемный стол для укладки листов, установленный под камерой разрежения, и воздушный коллектор, расположенный над камерой разрежения и подключенный ко входу эжектора, при этом камера разрежения выполнена в виде продольного относительно направления движения листа ряда секций, каждая из которых имеет две продольные и две поперечные относительно указанного направления боковые стенки и накрывающую их верхнюю стенку с выпускным окном, сообщающим внутреннюю полость секции с воздушным коллектором, и снабжена запорным клапаном, установленным на ее верхней стенке с возможностью перекрытия выпускного окна последней, при этом запорный клапан каждой секции камеры разрежения снабжен приводом, выполненным с возможностью открытия запорного клапана в конце перекрытия секции камеры разрежения движущимся листом и закрытия указанного клапана после отрыва листа от камеры разрежения - при работе устройства в режиме укладки листов или перед выходом движущегося листа из-под указанной секции - при работе устройства в режиме транспортировки листов, в отличие от прототипа камера разрежения снабжена, по меньшей мере, одним дополнительным продольно направленным рядом секций с образованием поперечных относительно направления движения листа рядов секций камеры разрежения, каждый из которых включает секцию основного ряда и смежную с ней секцию дополнительного ряда, при этом запорные клапаны секций каждого поперечного ряда снабжены общим приводом, выполненным с возможностью их одновременного открытия и закрытия.
Устройство может быть снабжено системой автоматического регулирования разрежения в секциях камеры разрежения, перекрытых движущимся листом, которая может быть выполнена в виде подключенного к эжектору регулятора объемного расхода воздуха, эжектируемого из камеры разрежения, и управляющего устройства, содержащего датчик давления, подключенный к внутренней полости воздушного коллектора, датчик объемного расхода воздуха, эжектируемого из камеры разрежения, блок коррекции и программное устройство, у которого вход подключен к датчику давления, а выход - к одному из входов блока коррекции, второй вход которого подключен к датчику объемного расхода воздуха, эжектируемого из камеры разрежения, а выход - к регулятору указанного расхода.
Эжектор камеры разрежения в предлагаемом устройстве может быть выполнен в виде лопастного вентилятора, снабженного регулируемым приводом. В этом случае указанная система автоматического регулирования разрежения может иметь также два других варианта исполнения, по первому из которых в воздушном коллекторе устройства может быть выполнено, по меньшей мере, одно перепускное окно для перепуска воздуха из окружающей среды в коллектор, а система автоматического регулирования разрежения в секциях камеры разрежения, перекрытых движущимся листом, может быть выполнена в виде, по меньшей мере, одного регулируемого перепускного клапана, установленного на воздушном коллекторе с возможностью изменения площади проходного сечения перепускного окна последнего и снабженного регулируемым приводом с управляющим устройством, содержащим датчик давления, подключенный к внутренней полости воздушного коллектора, блок коррекции и программное устройство, вход которого подключен к устройству ввода в него величины объемного расхода воздуха через вентилятор, а выход - к одному из входов блока коррекции, второй вход которого подключен к датчику давления, а выход - к регулируемому приводу перепускного клапана. В управляющем устройстве регулируемого привода перепускного клапана устройство ввода в программное устройство величины объемного расхода воздуха через вентилятор может быть выполнено в виде устройства ручного ввода указанной величины или в виде датчика указанного расхода.
По второму варианту исполнения системы автоматического регулирования разрежения при использовании в качестве эжектора камеры разрежения вентилятора в воздушном коллекторе устройства может быть выполнено, по меньшей мере, одно перепускное окно для перепуска воздуха из окружающей среды в коллектор, а указанная система автоматического регулирования разрежения может включать, по меньшей мере, один регулируемый перепускной клапан, установленный на воздушном коллекторе с возможностью изменения площади проходного сечения перепускного окна последнего и снабженный регулируемым приводом, регулятор объемного расхода воздуха через вентилятор, подключенный к приводу последнего, и управляющее устройство, содержащее датчик давления, подключенный к внутренней полости воздушного коллектора, датчик объемного расхода воздуха через вентилятор, блок коррекции разрежения, блок коррекции объемного расхода воздуха через вентилятор и программное устройство, у которого один вход подключен к датчику давления, второй вход - к датчику объемного расхода воздуха через вентилятор, один выход - к входу блока коррекции разрежения и второй выход - к входу блока коррекции объемного расхода воздуха через вентилятор, при этом блок коррекции разрежения имеет второй вход, подключенный к датчику давления, и выход, подключенный к регулируемому приводу перепускного клапана, а блок коррекции объемного расхода воздуха через вентилятор имеет второй вход, подключенный к датчику указанного расхода, и выход, подключенный к регулятору последнего.
Устройство может быть выполнено с системой реверсирования потока воздуха на выходе эжектора, обеспечивающей возврат воздуха с выхода последнего в секции первого по ходу движения листа поперечного ряда секций камеры разрежения или в воздушный коллектор. При этом устройство, выполненное с системой реверсирования потока воздуха с выхода эжектора в указанные секции камеры разрежения, может быть снабжено воздухопроводом с выпускным патрубком, расположенным перед первым по ходу движения листа поперечным рядом секций камеры разрежения, и каждая секция в указанном ряду может быть выполнена с впускным окном для прохода воздуха, сообщающим ее внутреннюю полость с воздухопроводом, в котором размещен двухпозиционный клапан, выполненный с возможностью перекрытия впускных окон секций указанного ряда в исходном закрытом положении и возможностью перевода в открытое положение с открытием указанных впускных окон и одновременным перекрытием прохода воздуха из воздухопровода на выход его выпускного патрубка и обеспечением прохода воздуха из воздухопровода в секции указанного ряда через их впускные окна, при этом эжектор своим выходом сообщается с воздухопроводом и установлен вблизи указанного ряда секций камеры разрежения, а двухпозиционный клапан снабжен приводом, выполненным с возможностью открытия клапана перед отрывом листа от камеры разрежения и закрытия клапана после указанного отрыва. В случае выполнения устройства с системой реверсирования потока воздуха с выхода эжектора в воздушный коллектор оно может быть снабжено выпускным патрубком, соединенным с выходом эжектора, который установлен вблизи от выхода воздушного коллектора, а последний может быть выполнен с впускным окном для прохода воздуха, сообщающим внутреннюю полость воздушного коллектора с выпускным патрубком, в котором размещен двухпозиционный клапан, выполненный с возможностью перекрытия впускного окна воздушного коллектора в исходном закрытом положении и возможностью перевода в открытое положение с открытием указанного впускного окна и одновременным перекрытием прохода воздуха с выхода эжектора на выход выпускного патрубка и обеспечением прохода воздуха с выхода эжектора в воздушный коллектор через его впускное окно, при этом двухпозиционный клапан снабжен приводом, выполненным с возможностью его открытия перед отрывом листа от камеры разрежения и закрытия после указанного отрыва.
В каждой секции камеры разрежения устройства поперечные боковые стенки могут быть выполнены с возможностью их взаимодействия с движущимся листом с поворотом этих стенок относительно верхней стенки секции в направлении движения листа, а продольные боковые стенки могут быть выполнены с возможностью взаимодействия с движущимся листом с облеганием их нижними торцами поверхности указанного листа, при этом поперечные боковые стенки секции могут быть подпружинены относительно ее верхней стенки с возможностью их возврата вместе с продольными боковыми стенками секции в исходное положение после отрыва листа от камеры разрежения или после его выхода из-под последней.
Нижняя торцевая часть камеры разрежения устройства, взаимодействующая с движущимся листом, может быть выполнена из материала, имеющего небольшой коэффициент трения, например из фторопласта.
Технический результат изобретения достигается также тем, что во втором варианте исполнения устройства для транспортировки и укладки листов, содержащем механизм для подачи листов, камеру разрежения с приводным транспортером и подъемный стол для укладки листов, установленный под камерой разрежения, при этом камера разрежения выполнена в виде продольного относительно направления движения листа ряда секций, каждая из которых подключена к эжектору и имеет две продольные и две поперечные относительно указанного направления боковые стенки и накрывающую их верхнюю стенку, в отличие от прототипа камера разрежения снабжена, по меньшей мере, одним дополнительным продольно направленным рядом секций с образованием поперечных относительно направления движения листа рядов секций камеры разрежения, каждый из которых включает секцию основного ряда и смежную с ней секцию дополнительного ряда, при этом каждая секция камеры разрежения снабжена эжектором, установленным над ее верхней стенкой и сообщающимся с внутренней полостью указанной секции, каждые две смежные секции в каждом продольном ряду секций камеры разрежения снабжены запорным клапаном, установленным между указанными секциями и выполненным с возможностью отделения секций друг от друга в его исходном закрытом положении и возможностью их сообщения в его открытом положении, а в каждых двух смежных поперечных рядах секций камеры разрежения запорные клапаны смежных секций снабжены приводом, выполненным с возможностью их одновременного открытия в конце перекрытия указанных смежных рядов секций камеры разрежения движущимся листом и закрытия после отрыва листа от камеры разрежения при работе устройства в режиме укладки листов.
В данном варианте устройства каждая секция камеры разрежения может быть снабжена системой автоматического регулирования разрежения, действующего в секции после ее перекрытия движущимся листом, включающей регулятор объемного расхода эжектируемого из секции воздуха, подключенный к эжектору и снабженный управляющим устройством, содержащим датчик давления, подключенный к внутренней полости секции, датчик объемного расхода воздуха, эжектируемого из секции, блок коррекции и программное устройство, у которого вход подключен к датчику давления, а выход - к одному из входов блока коррекции, второй вход которого подключен к датчику объемного расхода воздуха, эжектируемого из секции, а выход - к регулятору указанного расхода.
Вместе с тем в данном варианте устройства в каждой секции его камеры разрежения выпускной патрубок может примыкать к верхней стенке, в которой может быть выполнено впускное окно, сообщающее внутреннюю полость секции с выпускным патрубком, а эжектор расположен перед указанным впускным окном по ходу движения потока воздуха в выпускном патрубке, внутри которого размещен двухпозиционный клапан, выполненный с возможностью перекрытия впускного окна верхней стенки при исходном закрытом положении и возможностью перевода в открытое положение с открытием указанного впускного окна и одновременным перекрытием прохода воздуха с выхода эжектора на выход выпускного патрубка и обеспечением прохода воздуха с выхода эжектора в секцию камеры разрежения через впускное окно ее верхней стенки, при этом двухпозиционные клапаны, размещенные в выпускных патрубках секций камеры разрежения, снабжены приводом, выполненным с возможностью их одновременного открытия перед отрывом листа от камеры разрежения и закрытия после указанного отрыва.
Кроме того, в данном варианте устройства в каждой секции камеры разрежения поперечные боковые стенки могут быть выполнены с возможностью их взаимодействия с движущимся листом с поворотом этих стенок относительно верхней стенки секции в направлении движения листа, а продольные боковые стенки могут быть выполнены с возможностью взаимодействия с движущимся листом с облеганием их нижними торцами поверхности указанного листа, при этом поперечные боковые стенки секции могут быть подпружинены относительно ее верхней стенки с возможностью их возврата вместе с продольными боковыми стенками секции в исходное положение после отрыва листа от камеры разрежения или после его выхода из-под последней и в каждой поперечной боковой стенке секции, разделяющей две смежные секции в каждом продольном ряду секций камеры разрежения, может быть выполнено перепускное окно, а запорный клапан каждых двух смежных секции в каждом указанном ряду секций камеры разрежения может быть выполнен с возможностью перекрытия указанного перепускного окна в исходном закрытом положении и возможностью его открытия при переводе клапана в открытое положение.
При этом нижняя торцевая часть камеры разрежения данного устройства, взаимодействующая с движущимся листом, может быть выполнена из материала, имеющего небольшой коэффициент трения, например из фторопласта.
Сущность изобретения поясняется чертежами, на которых изображены:
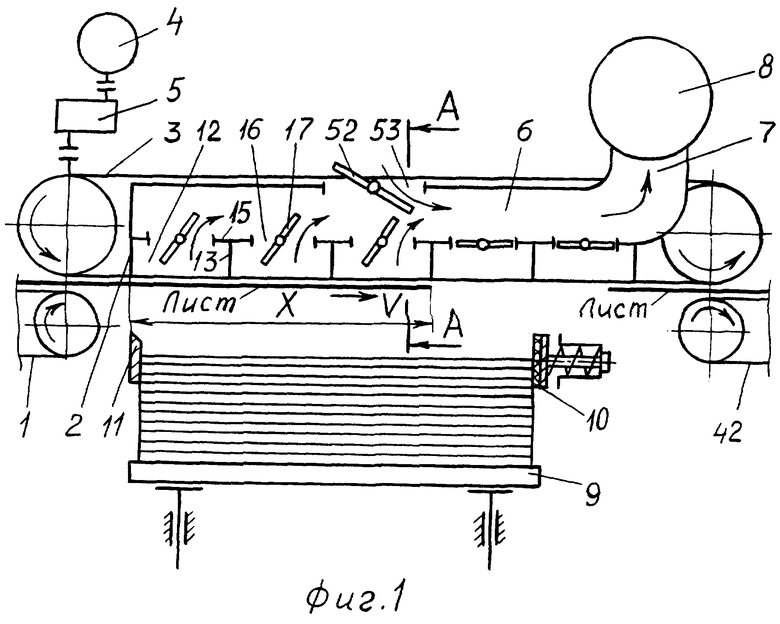
на фиг.1 - продольный разрез устройства по первому варианту его исполнения;
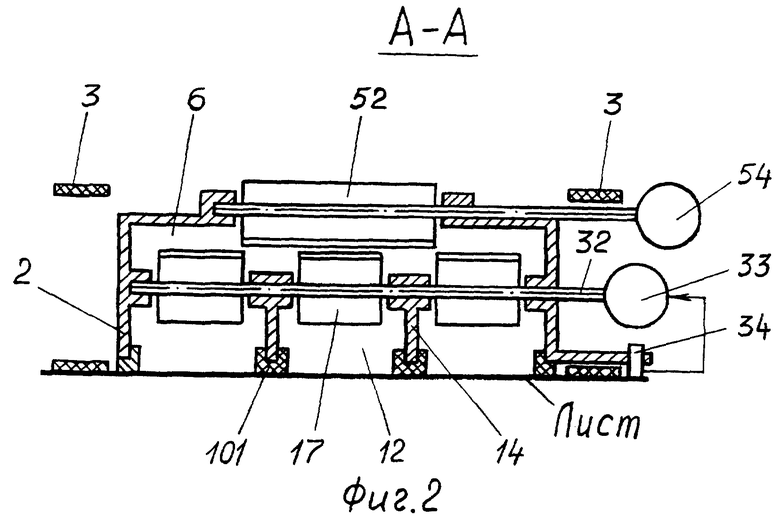
на фиг.2 - сечение А-А на фиг.1;
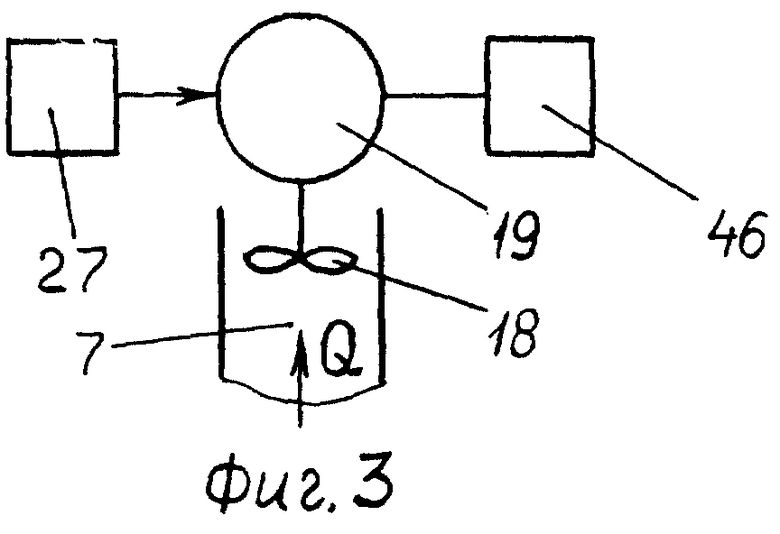
на фиг.3 - эжектор камеры разрежения, выполненный в виде лопастного вентилятора;
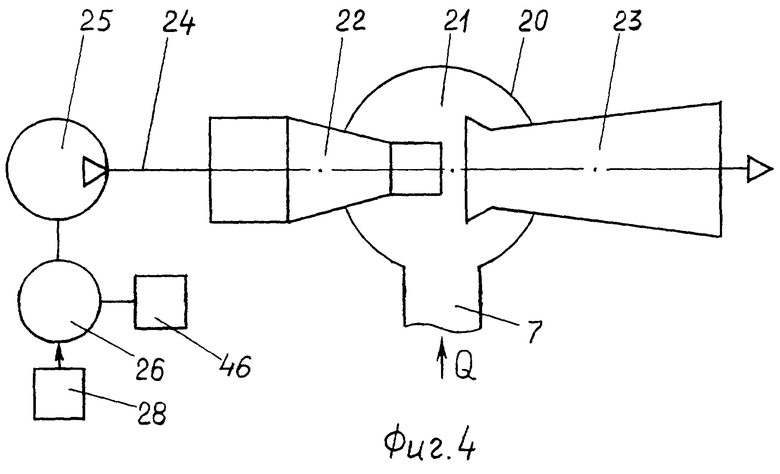
на фиг.4 - эжектор камеры разрежения, выполненный в виде струйного вакуумного насоса;
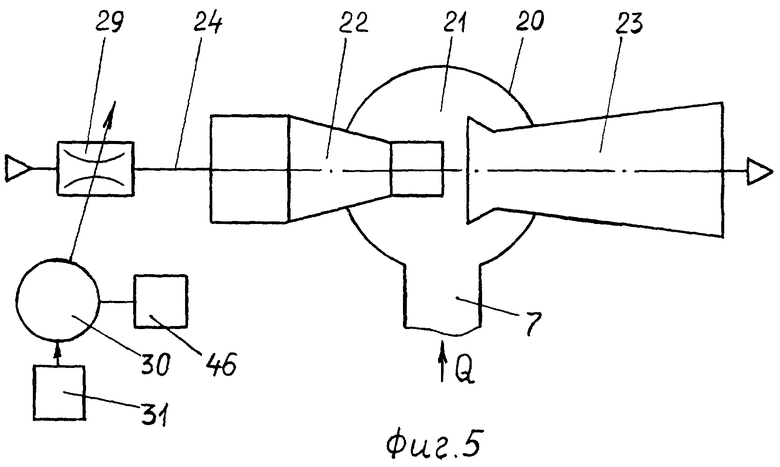
на фиг.5 - то же с регулируемым дросселем в питающей линии насоса;
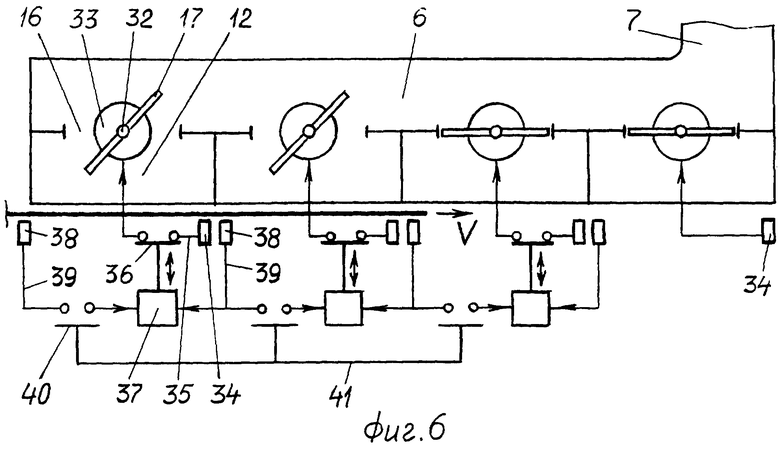
на фиг.6 - принципиальная схема системы управления запорными клапанами секций камеры разрежения;
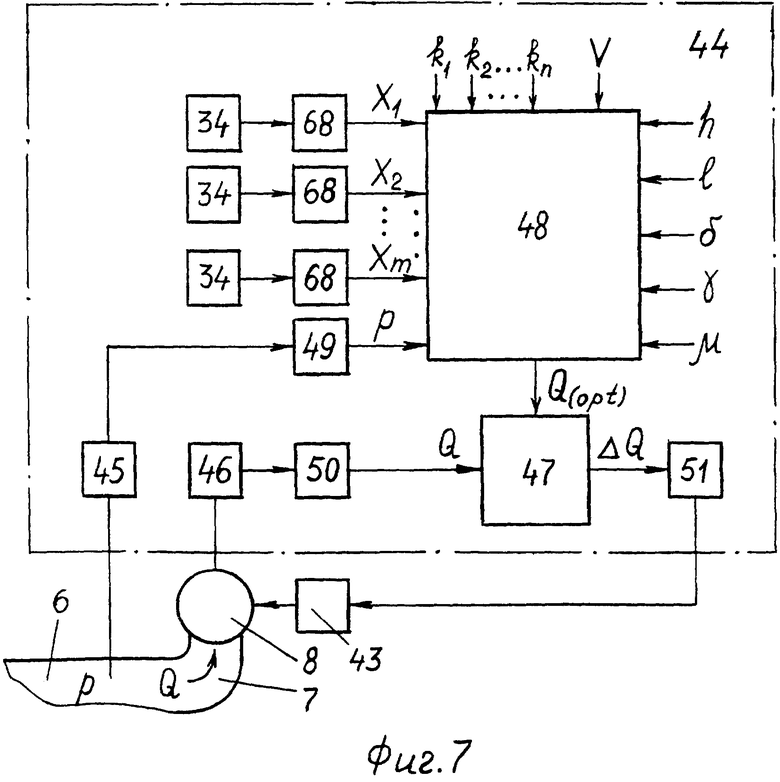
на фиг.7 - принципиальная схема системы автоматического регулирования разрежения над движущимся листом за счет изменения объемного расхода воздуха, эжектируемого из камеры разрежения;
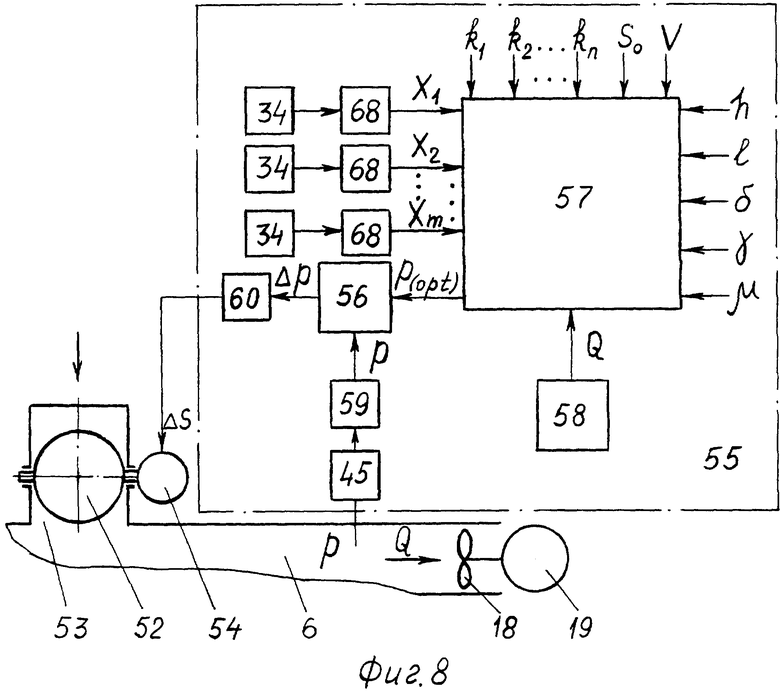
на фиг.8 - принципиальная схема системы автоматического регулирования разрежения над движущимся листом за счет изменения объемного расхода воздуха, перепускаемого в воздушный коллектор из окружающей среды;
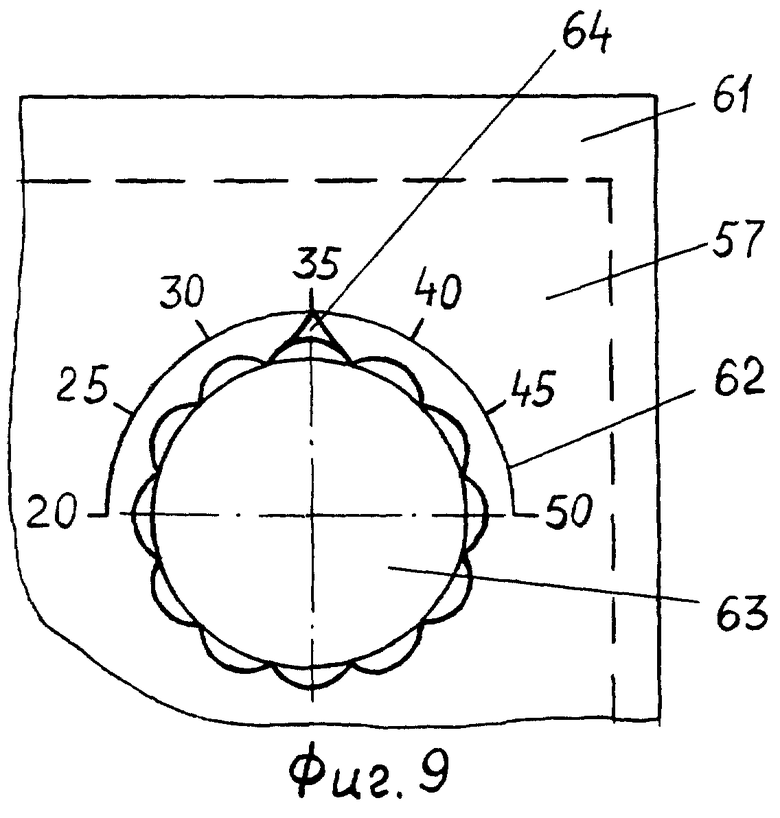
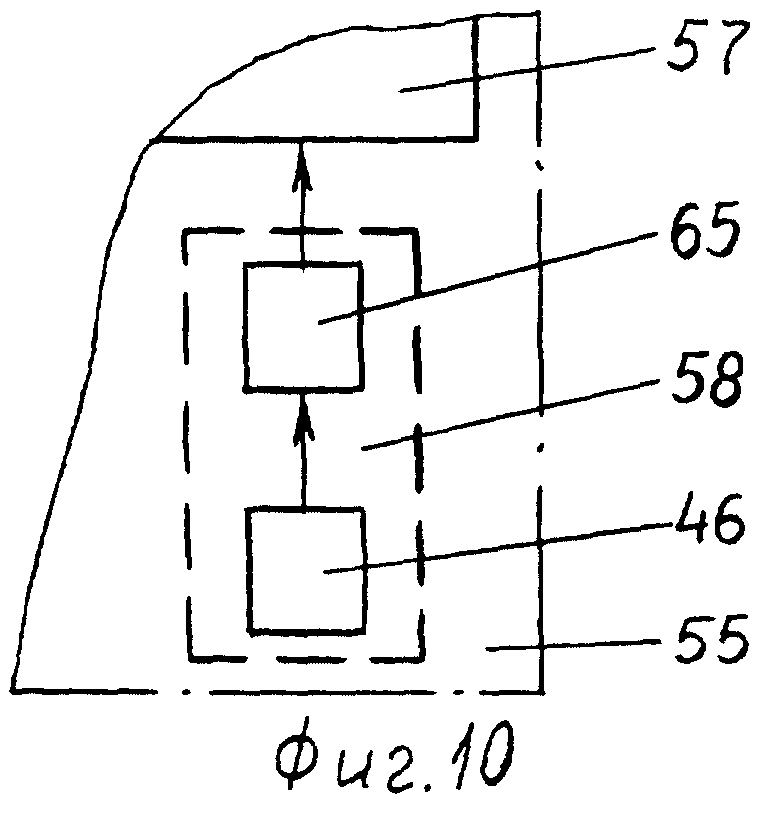
на фиг.9 и 10 - варианты устройства ввода заданной величины объемного расхода воздуха через вентилятор в управляющее устройство привода перепускного клапана воздушного коллектора;
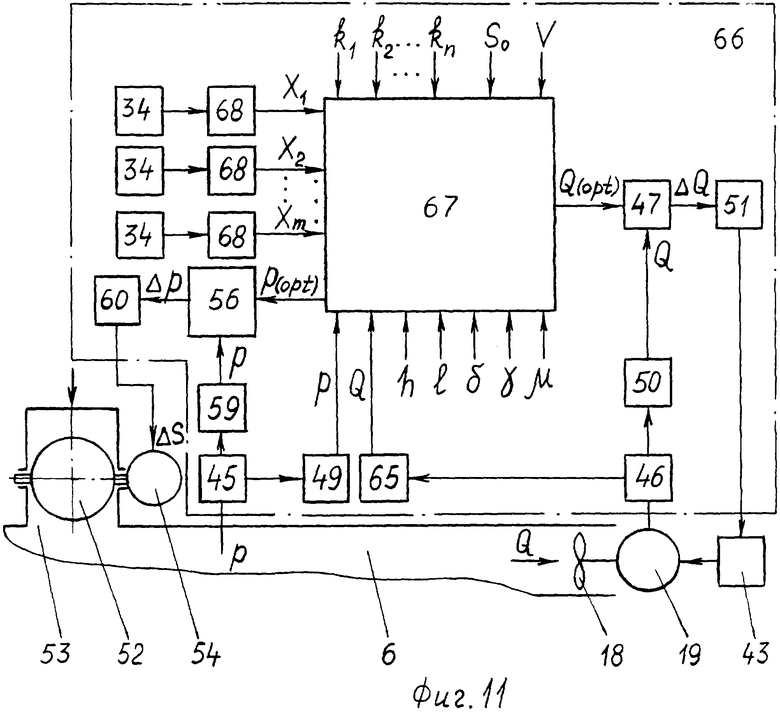
на фиг.11 - принципиальная схема комбинированной системы автоматического регулирования разрежения над движущимся листом за счет изменения объемного расхода воздуха, перепускаемого в воздушный коллектор из окружающей среды, и объемного расхода воздуха через вентилятор;
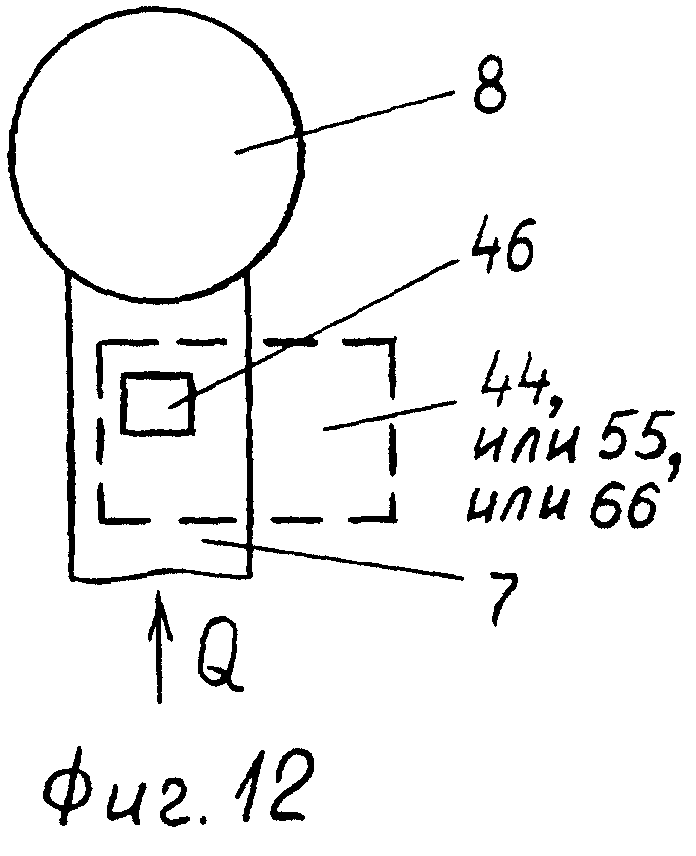
на фиг.12 - вариант датчика объемного расхода воздуха, проходящего через эжектор камеры разрежения;
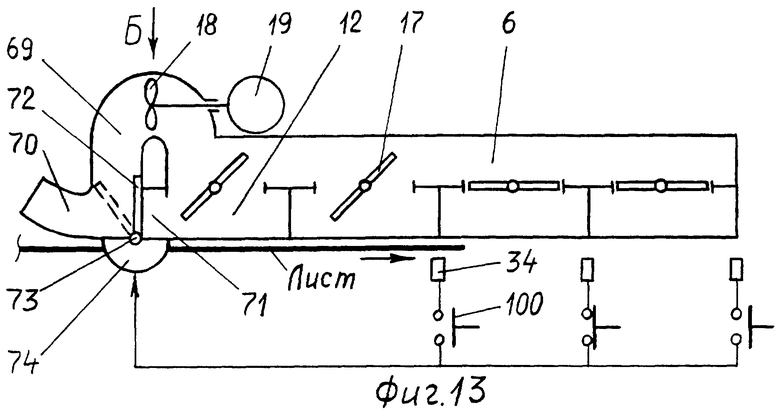
на фиг.13 - продольный разрез устройства, снабженного системой реверсирования потока воздуха с выхода эжектора в секции камеры разрежения;
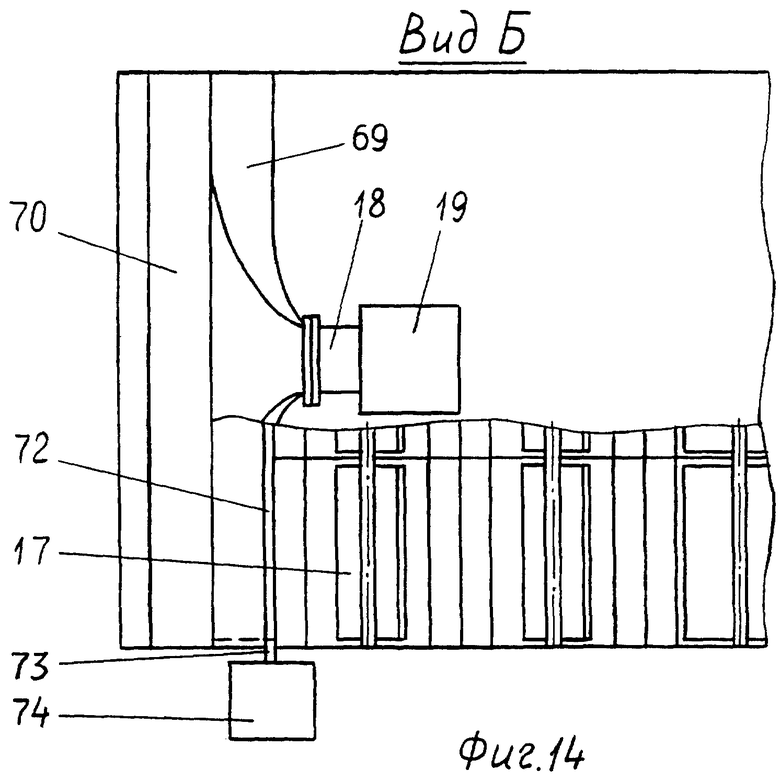
на фиг.14 - вид по стрелке Б на фиг.13;
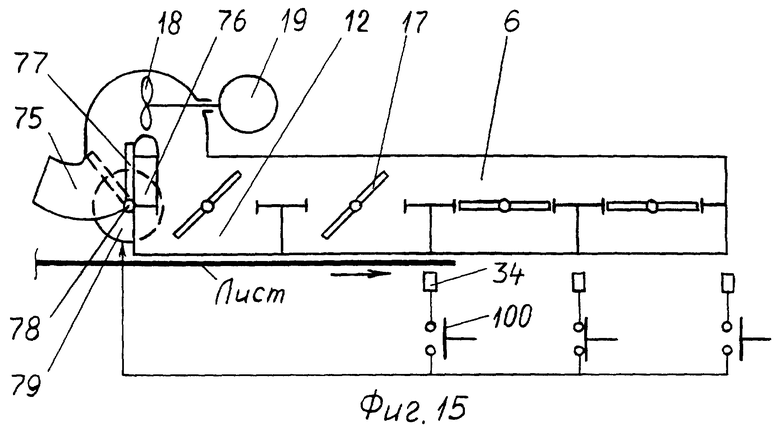
на фиг.15 - продольный разрез устройства, снабженного системой реверсирования потока воздуха с выхода эжектора в воздушный коллектор;
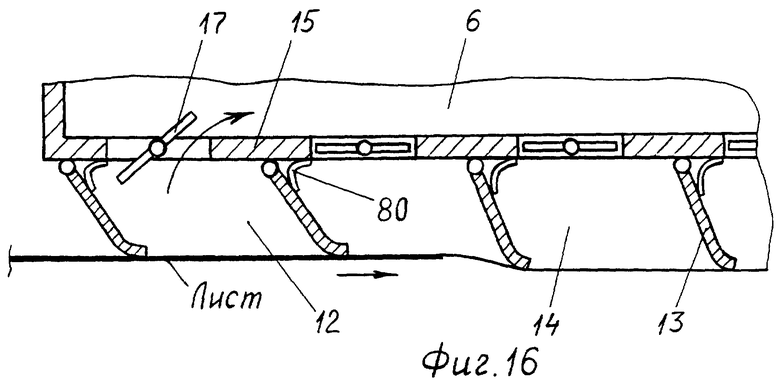
на фиг.16 - фрагмент камеры разрежения устройства, имеющей подвижные боковые стенки;
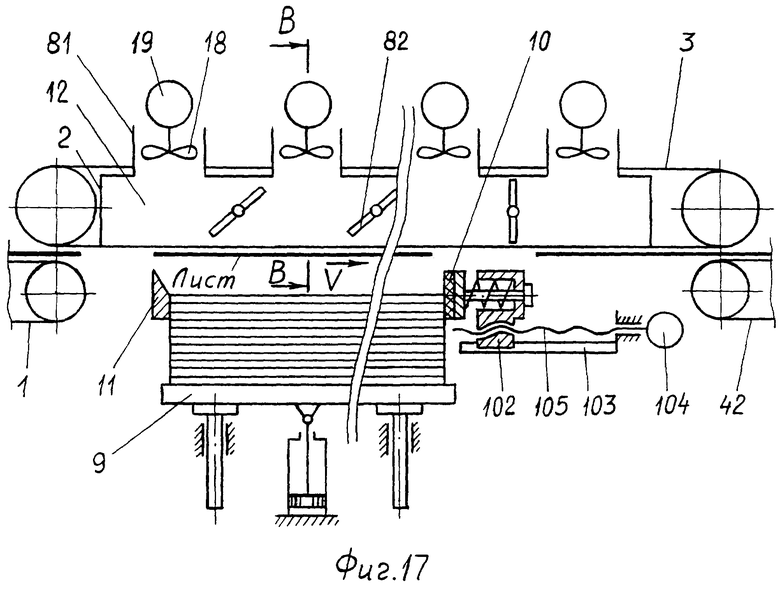
на фиг.17 - продольный разрез устройства по второму варианту его исполнения;
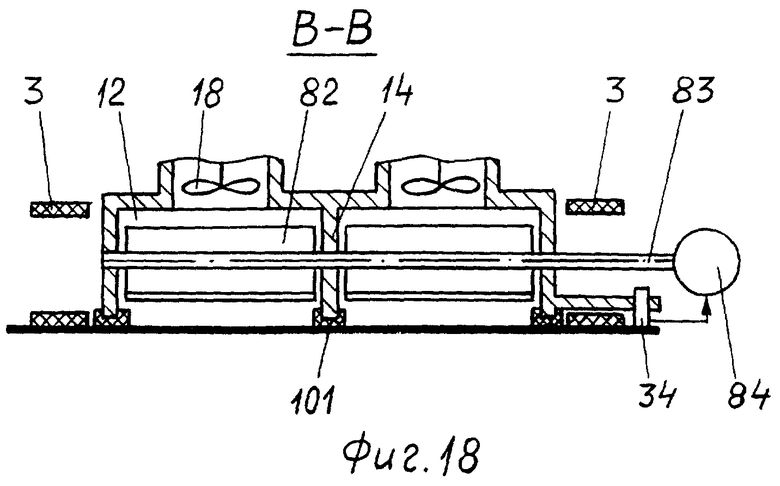
на фиг.18 - сечение В-В на фиг.17;
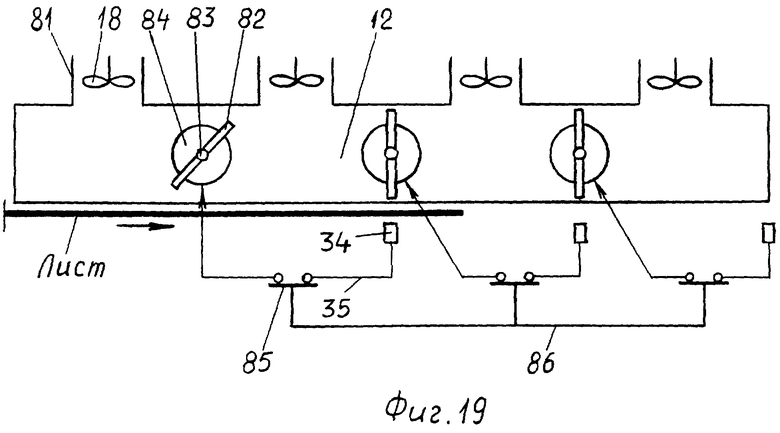
на фиг.19 - принципиальная схема системы управления запорными клапанами смежных секций камеры разрежения;
на фиг.20 - принципиальная схема системы автоматического регулирования разрежения в каждой из секций камеры разрежения;
на фиг.21 - продольный разрез устройства, в котором секции камеры разрежения снабжены системой реверсирования потока воздуха с выхода эжектора в секцию;
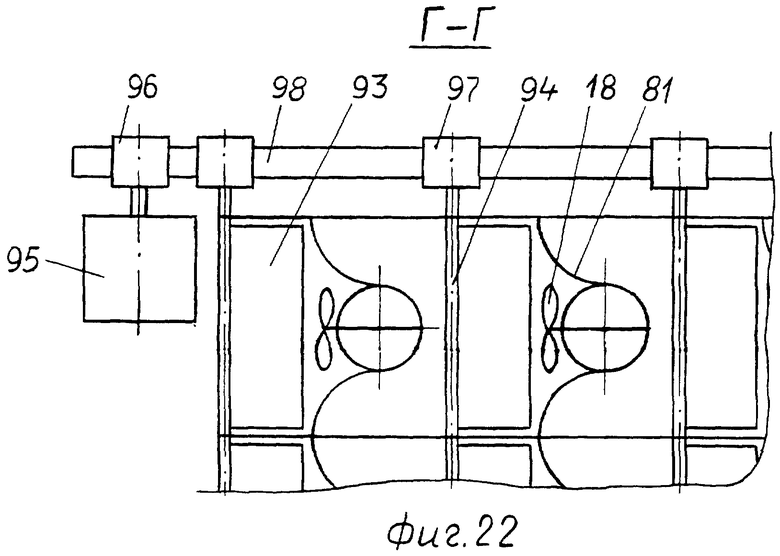
на фиг.22 - сечение Г-Г на фиг.21;
на фиг.23 - фрагмент камеры разрежения устройства, имеющей подвижные боковые стенки.
Устройство для транспортировки и укладки листов содержит механизм для подачи листов, выполненный, например, в виде подающего транспортера 1 (фиг.1), камеру разрежения 2, снабженную приводным транспортером 3 (например, ленточным, роликовым и т.п.) с приводом 4 и редуктором 5, воздушный коллектор 6 с выпускным патрубком 7, расположенный над камерой разрежения 2, эжектор 8, подключенный к выпускному патрубку 7, и подъемный стол 9 для укладки листов, расположенный под камерой разрежения 2 и снабженный передним 10 и задним 11 упорами. При этом камера разрежения 2 выполнена в виде, по меньшей мере, одного продольного относительно направления движения листа ряда секций 12, каждая из которых имеет две поперечные 13 и две продольные 14 (фиг.2) относительно указанного направления боковые стенки и накрывающую их верхнюю стенку 15 с выпускным окном 16, сообщающим внутреннюю полость секции с воздушным коллектором 6, и снабжена запорным клапаном 17, установленным на ее верхней стенке 15 и выполненным с возможностью перекрытия в исходном закрытом положении выпускного окна 16 последней и возможностью его открытия при переводе клапана в открытое положение. Эжектор 8 может быть выполнен, например, в виде лопастного вентилятора 18 (фиг.3), снабженного приводом 19, или в виде струйного вакуумного насоса, содержащего корпус 20 (фиг.4) с внутренней смесительной камерой 21, сообщающейся с выпускным патрубком 7, активное струеформирующее сопло 22 и диффузор 23. Сопло 22 снабжено питающей линией 24, которая может быть подключена к компрессору 25 с приводом 26, входящему в конструкцию предлагаемого устройства, или к общей (цеховой, заводской и т.п.) магистрали сжатого воздуха. Для обеспечения возможности регулирования производительности эжектора (объемного расхода Q воздуха, эжектируемого через выпускной патрубок 7 воздушного коллектора 6) привод 19 (фиг.3) вентилятора 18 может быть снабжен регулятором 27 скорости вращения ротора вентилятора, а привод 26 (фиг.4) компрессора 25 может быть снабжен регулятором 28 скорости вращения рабочего вала компрессора, при изменении которой изменяется объемная подача сжатого воздуха на выходе компрессора, что приводит к изменению скорости эжектирующей струи, формируемой соплом 22, и, соответственно, к изменению объемного расхода Q воздуха, эжектируемого указанной струей из патрубка 7 в диффузор 23. Вместе с тем при использовании в качестве эжектора струйного насоса для регулировки расхода Q воздуха через эжектор 8 вместо регулятора 28 объемной подачи компрессора 25 может быть использован регулируемый дроссель 29 (фиг.5), снабженный приводом 30 и подключенным к последнему регулятором 31 площади проходного сечения дросселя 29. При изменении указанной площади изменяется объемный расход сжатого воздуха через сопло 22, а вместе с ним изменяется и скорость эжектирующей струи, что в конечном итоге приводит к изменению объемного расхода Q воздуха, эжектируемого из патрубка 7 в диффузор 23.
Запорные клапаны 17 (фиг.1) секций 12 каждого поперечного ряда секций камеры разрежения 2 могут быть выполнены в виде поворотных заслонок, установленных на общей оси вращения 32 (фиг.2), снабженной приводом 33. Указанный привод может быть снабжен датчиком 34 (фиг.2 и 6), установленным на заднем по ходу движения листа краю указанного ряда секций 12 и выполненным с возможностью формирования сигнала в его выходной линии 35 при входе в зону его расположения движущегося листа. Выходная линия 35 датчика 34 соединена с приводом 33 через выключатель 36, снабженный управляющим приводом 37, а на переднем по ходу движения листа краю указанного ряда секций установлен датчик 38, выполненный с возможностью формирования сигнала в его выходной линии 39 при выходе из зоны его расположения заднего края движущегося листа. При этом каждый привод 37, установленный в одном из поперечных рядов секций 12 камеры разрежения 2, имеет два управляющих входа, один из которых подсоединен через выключатель 40 к выходной линии 39 датчика 38, установленного на переднем краю данного ряда секций 12, а второй - к выходной линии 39 датчика 38, установленного на переднем краю следующего по ходу движения листа поперечного ряда секций 12 камеры разрежения 2. Каждые два датчика 34 и 38, установленные на границе двух смежных поперечных рядов секций 12 камеры разрежения 2, могут быть объединены в один датчик комбинированного действия, снабженный двумя выходными линиями - 35 и 39 и способный вырабатывать сигнал в линии 35 при входе листа в зону его расположения и в линии 39 - при выходе листа из зоны его расположения. Для повышения оперативности управления устройством выключатели 40 могут быть соединены друг с другом общей планкой 41, обеспечивающей возможность их одновременного включения или выключения. При работе устройства в режиме транспортировки листов рядом с ним может быть установлен передаточный транспортер 42 или следующее устройство для укладки и транспортировки листов.
Для снижения энергозатрат на работу эжектора за счет поддержания на оптимальном уровне величины подъемной силы, удерживающей движущийся лист под камерой разрежения 2, устройство может быть снабжено системой автоматического регулирования по заданной оптимальной программе величины разрежения в секциях 12 камеры разрежения 2, перекрытых движущимся листом. Эта система может быть выполнена в виде регулятора 43 (фиг.7) объемного расхода Q воздуха через эжектор 8, снабженного управляющим устройством 44. При использовании в качестве эжектора 8 вентилятора 18 (фиг.3) в качестве регулятора 43 может быть использован регулятор 27 скорости вращения ротора вентилятора, а при использовании в качестве эжектора 8 струйного вакуумного насоса в качестве регулятора 43 может быть использован регулятор 28 (фиг.4) скорости вращения рабочего вала компрессора 25 или регулятор 31 (фиг.5) площади проходного сечения регулируемого дросселя 29. Управляющее устройство 44 содержит датчик давления 45, подключенный к внутренней полости воздушного коллектора 6 и выполненный с возможностью регистрации величины разрежения в указанной полости, датчик 46 объемного расхода Q воздуха через эжектор 8, подключенный к последнему, блок 47 коррекции указанного расхода Q и программное устройство 48, у которого вход подключен через преобразователь 49 к датчику давления 45, а выход - к одному из входов блока коррекции 47, второй вход которого подключен через преобразователь 50 к датчику 46, а выход - через преобразователь 51 к регулятору 43.
При использовании в качестве эжектора 8 вентилятора 18 (фиг.3) система автоматического регулирования разрежения над движущимся листом может быть выполнена также по двум другим вариантам. По первому из них она может содержать, по меньшей мере, один регулируемый перепускной клапан 52 (фиг.1), установленный на воздушном коллекторе 6 с возможностью изменения площади проходного сечения перепускного окна 53, выполненного в указанном коллекторе, и снабженный регулируемым приводом 54 (фиг.2) с управляющим устройством 55 (фиг.8), содержащим датчик давления 45, подключенный к внутренней полости воздушного коллектора 6, блок коррекции 56 разрежения в воздушном коллекторе 6 и программное устройство 57, вход которого подключен к устройству 58 ввода в последний величины объемного расхода Q воздуха, эжектируемого вентилятором 18 из воздушного коллектора 6 через выпускной патрубок 7, а выход - к одному из входов блока коррекции 56, второй вход которого подключен через преобразователь 60 к регулируемому приводу 54. При этом устройство 58 может быть выполнено в виде устройства ручного ввода величины Q в программное устройство 57, выполненного, например, в виде установленной на корпусе 61 (фиг.9) управляющего устройства 55 шкалы 62 с цифровыми или уровневыми (I, II, III и т.д.) делениями, отражающими величину Q, и подвижной задающей ручки 63 с указателем 64 задаваемой величины Q, при этом ручка 63 соединена с программным устройством 57 с возможностью изменения вводимой в последнее величины Q при перемещении ручки 63 в соответствии с изменением положения ее указателя 64 на шкале 62. Вместе с тем устройство 58 может быть выполнено в виде датчика 46 (фиг.10) объемного расхода Q воздуха, эжектируемого вентилятором через выпускной патрубок 7 воздушного коллектора 6, и преобразователя 65, через который датчик 46 подключен к программному устройству 57. По второму варианту указанная система автоматического регулирования может содержать регулируемый перепускной клапан 52 (фиг.11), установленный на воздушном коллекторе 6 с возможностью перепуска в последний воздуха из окружающей среды и снабженный регулируемым приводом 54, регулятор 43 объемного расхода Q воздуха через вентилятор 18 и управляющее устройство 66, содержащее датчик давления 45, подключенный к внутренней полости воздушного коллектора 6, датчик 46 объемного расхода Q, подключенный к вентилятору 18, блок 56 коррекции разрежения над движущимся листом (в секциях 12 камеры разрежения 2, перекрытых движущимся листом), блок 47 коррекции расхода Q и программное устройство 67, у которого один вход подключен через преобразователь 49 к датчику давления 45, второй вход - через преобразователь 65 к датчику 46 расхода Q, один выход - ко входу блока 56 коррекции разрежения и второй выход - ко входу блока 47 коррекции расхода Q. При этом блок 56 коррекции разрежения имеет второй вход, подключенный через преобразователь 59 к датчику давления 45, и выход, подключенный через преобразователь 60 к регулируемому приводу 54 перепускного клапана 52, а блок 47 коррекции расхода Q имеет второй вход, подключенный через преобразователь 50 к датчику 46 расхода Q, и выход, подключенный через преобразователь 51 к регулятору 43.
В представленных вариантах системы автоматического регулирования датчик 46 (фиг.7, 10 и 11) объемного расхода Q может быть выполнен в виде датчика скорости вращения ротора вентилятора 18 (фиг.3) или рабочего вала компрессора 25 (фиг.4) или в виде датчика площади проходного сечения дросселя 29 (фиг.5) и может быть подключен соответственно к приводу 19 вентилятора 18, или к приводу 26 компрессора 25, или к приводу 30 дросселя 29. При этом преобразователи 50 и 65 (фиг.7, 10 и 11) выполнены с возможностью преобразования текущего значения величины скорости вращения ротора вентилятора 18 или рабочего вала компрессора 25 или текущего значения величины площади проходного сечения дросселя 29 в текущее значение величины расхода Q через эжектор 8. Вместе с тем датчик 46 может быть выполнен в виде датчика скорости воздушного потока, установленного в выпускном патрубке 7 (фиг.12) перед эжектором 8. В этом случае преобразователи 50 и 65 выполнены с возможностью преобразования текущего значения величины указанной скорости в текущее значение величины расхода Q воздуха через эжектор 8.
Кроме того, в представленных вариантах системы автоматического регулирования разрежения над движущимся листом каждое из программных устройств 48 (фиг.7), 57 (фиг.8) и 67 (фиг.11) может быть подключено через преобразователи 68 к датчикам 34 (фиг.6) положения листа для обеспечения возможности получения данным устройством информации о величине текущих значений X1, Х2,... Хm дискретного хода Х (фиг.1) листа, отмеряемого от переднего по ходу его движения края камеры разрежения 2 до датчика 34, расположение которого на камере разрежения соответствует измеряемому значению X. Так, величина хода листа X1 фиксируется первым по ходу движения листа датчиком 34, величина хода листа Х2 фиксируется вторым по ходу движения листа датчиком 34 и т.д. Максимальная величина хода листа Хm фиксируется последним по ходу движения листа датчиком 34, где порядковый номер m параметра Х равен числу поперечных рядов секций 12, имеющихся в камере разрежения 2. При этом каждое из указанных программных устройств 48, 57 и 67 может быть выполнено с возможностью ввода в него заданных значений конструктивных параметров k1, k2...kn камеры разрежения 2, оказывающих влияние на оптимальную величину разрежения над движущимся листом (например, ее длины, ширины, количества секций 12, их длины и ширины, коэффициента трения поверхности материала, из которого изготовлен нижний торец камеры разрежения, взаимодействующий с поверхностью движущегося листа и т.п.), а также геометрических размеров (ширины h, длины 1 и толщины δ ) транспортируемых и укладываемых листов, удельного веса γ их материала и коэффициента трения μ их поверхности и скорости V движения транспортера 3. Вместе с тем программные устройства 57 и 67 могут быть выполнены также с возможностью ввода в каждое из них заданного значения начальной (исходной) площади S0 проходного сечения перепускного клапана 52, соответствующей началу перемещения листа под камерой разрежения 2. При этом программное устройство 48 (фиг.7) выполнено с возможностью формирования на его выходе сигнала, отражающего оптимальное значение объемного расхода Q воздуха, эжектируемого из камеры разрежения с помощью эжектора 8, программное устройство 57 (фиг.8) - с возможностью формирования на его выходе сигнала, отражающего оптимальное значение разрежения р в секциях 12 камеры разрежения 2, перекрытых движущимся листом и сообщающихся с воздушным коллектором 6, а программное устройство 67 (фиг.11) - с возможностью формирования на одном из его выходов сигнала, отражающего оптимальное значение указанного разрежения р и с возможностью формирования на его втором выходе сигнала, отражающего оптимальное значение указанного расхода Q. Указанные оптимальные значения параметров р и Q могут задаваться для каждого из текущих значений X1, X2,... Xm дискретного хода Х (фиг.1) листа под камерой разрежения 2, фиксируемых датчиками 34 положения листа. При этом оптимальные текущие значения параметров р и Q относительно текущей величины дискретного хода Х листа могут задаваться исходя из условий обеспечения требуемого значения производительности устройства при наименьших энергозатратах на его работу и исключения повреждений листов при их транспортировке и укладке и преждевременного отрыва листов от камеры разрежения.
Для ускорения отрыва листа от камеры разрежения 2 с целью повышения производительности устройства оно может быть снабжено системой реверсирования потока воздуха на выходе эжектора 8 (например, вентилятора 18) (фиг.13 и 14), выполненной в виде воздухопровода 69 с выпускным патрубком 70, расположенным перед первым по ходу движения листа поперечным рядом секций 12 камеры разрежения 2, и каждая секция 12 в указанном ряду может быть выполнена с впускным окном 71 для прохода воздуха, сообщающим ее внутреннюю полость с воздухопроводом 69, в котором размещен двухпозиционный клапан 72, выполненный с возможностью перекрытия впускных окон 71 секций 12 указанного ряда в исходном закрытом положении клапана и возможностью перевода в открытое положение с открытием указанных впускных окон 71 и одновременным перекрытием прохода воздуха из воздухопровода 69 на выход его выпускного патрубка 70 и обеспечением прохода воздуха из воздухопровода 69 в секции 12 указанного ряда через их впускные окна 71. При этом вентилятор 18 своим выходом сообщается с воздухопроводом 69 и установлен вблизи первого по ходу движения листа поперечного ряда секций 12 камеры разрежения 2, а клапан 72 может быть выполнен в виде поворотной заслонки с осью вращения 73, снабженной приводом 74.
В другом варианте исполнения системы реверсирования потока воздуха на выходе эжектора 8 (например, вентилятора 18) (фиг.15) устройство может быть снабжено выпускным патрубком 75, соединенным с выходом эжектора, который установлен вблизи от выхода коллектора 6, и в этом устройстве коллектор 6 может быть выполнен с впускным окном 76 для прохода воздуха, сообщающим внутреннюю полость коллектора 6 с патрубком 75. Внутри патрубка 75 размещен двухпозиционный клапан 77, выполненный с возможностью перекрытия впускного окна 76 коллектора 6 в исходном закрытом положении и возможностью перевода в открытое положение с открытием впускного окна 76 и одновременным перекрытием прохода воздуха с выхода вентилятора 18 на выход выпускного патрубка 75 и обеспечением прохода воздуха с выхода вентилятора 18 в коллектор 6 через впускное окно 76 последнего. Клапан 77 может быть выполнен в виде поворотной заслонки, установленной на оси вращения 78, снабженной приводом 79.
Для снижения энергозатрат на работу эжектора 8 за счет повышения степени герметичности секций 12, перекрытых движущимся листом, в каждой секции 12 две поперечные боковые стенки 13 (фиг.16) могут быть выполнены с возможностью их взаимодействия с движущимся листом с поворотом указанных стенок относительно верхней стенки 15 в направлении движения листа, а продольные боковые стенки 14 могут быть выполнены с возможностью взаимодействия с движущимся листом с облеганием их нижними торцами поверхности указанного листа. При этом продольные стенки 14 могут быть выполнены из материала, способного изменять свою геометрическую форму с последующим ее восстановлением, например из эластичной резины, ткани, полимерной пленки, прорезиненной ткани и т. п., а поперечные стенки 13 могут быть подпружинены относительно верхней стенки 15 с возможностью их возврата с помощью пружин 80 вместе с продольными стенками 14 в исходное положение.
В другом варианте исполнения предлагаемого устройства каждая секция 12 (фиг.17) камеры разрежения 2 снабжена собственным эжектором 8, выполненным, например, в виде лопастного вентилятора 18 с приводом 19 или в виде струйного вакуумного насоса, показанного на фиг.4 и 5, а верхняя стенка 15 каждой секции 12 выполнена с наружным выпускным патрубком 81, подключенным к эжектору. При этом в каждом продольном ряду секций 12 камеры разрежения 2 каждые две смежные секции 12 снабжены запорным клапаном 82, установленным между ними и выполненным с возможностью отделения секций друг от друга в его исходном закрытом положении и возможностью сообщения секций друг с другом в его открытом положении. Запорный клапан 82 может быть установлен на поперечной стенке 13, разделяющей указанные смежные секции 12, и может быть выполнен в виде поворотной заслонки. Вместе с тем роль запорного клапана 82 может выполнять сама поперечная стенка 13, выполненная в виде поворотной заслонки 82, как показано на фиг.17. При этом в каждых двух поперечных смежных рядах секций 12 камеры разрежения запорные клапаны 82 смежных секций 12, выполненные в виде поворотных заслонок, установлены на общей оси вращения 83 (фиг.18), снабженной приводом 84 с датчиком 34 положения листа, установленным на заднем по ходу движения листа краю второго из указанных рядов по ходу движения листа (фиг.19) и снабженным выходной линией 35, соединенной с приводом 84 через выключатель 85. Для повышения оперативности управления устройством выключатели 85 могут быть закреплены на общей планке 86, обеспечивающей возможность их одновременного включения или выключения.
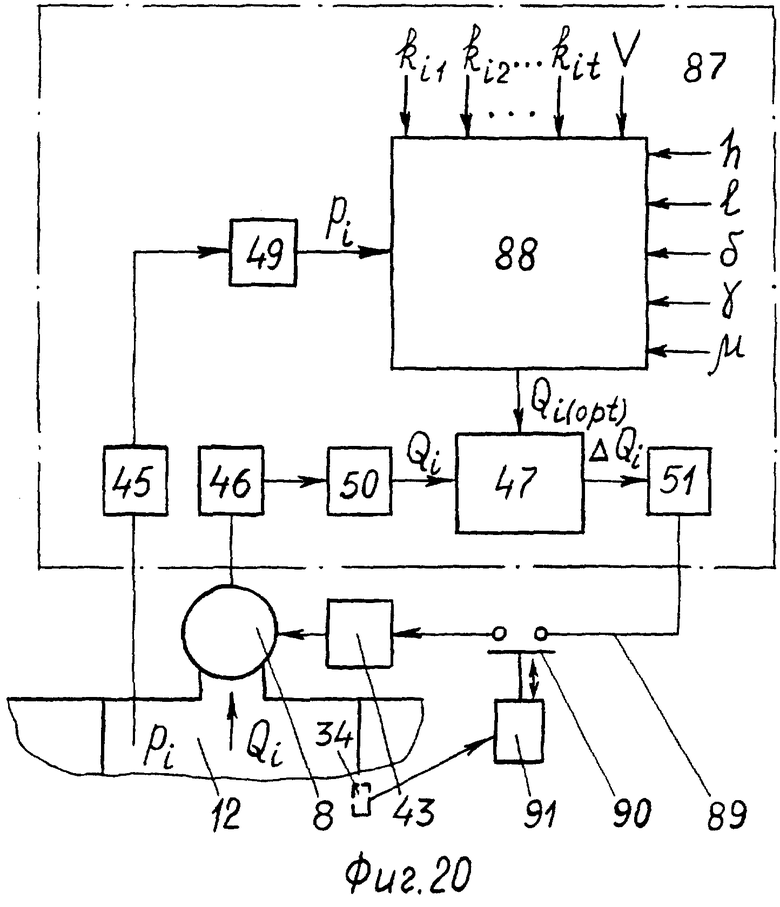
Для снижения энергозатрат на работу эжекторов камеры разрежения за счет поддержания на оптимальном уровне величины подъемной силы, удерживающей движущийся лист под камерой разрежения 2, любая i-я (i=1,2,3,...N, где N равно числу секций 12 в камере разрежения) секция 12 последней в данном устройстве может быть снабжена системой автоматического регулирования по заданной оптимальной программе величины разрежения рi, действующего в ней после ее перекрытия движущимся листом. Указанная система может содержать подключенный к эжектору 8 регулятор 43 (фиг.20) объемного расхода Qi воздуха, эжектируемого из секции 12 при помощи указанного эжектора, и управляющее устройство 87, аналогичное управляющему устройству 44, показанному на фиг.7, и отличающееся от последнего тем, что его программное устройство 88 не подключено к датчикам 34 положения листа и выполнено с возможностью ввода в него конструктивных параметров ki1, ki2...kit i-й секции 12 камеры разрежения, где максимальный числовой порядковый номер t параметра ki равен числу конструктивных параметров секции, оказывающих влияние на оптимальную величину создаваемого в ней разрежения. К числу указанных конструктивных параметров секции можно отнести, например, ее длину, ширину, высоту; коэффициент трения нижнего торца секции и т.п. Для снижения энергозатрат на работу эжектора 8 в каждой секции 12 камеры разрежения во входной линии 89 регулятора 43, соединяющей последний с управляющим устройством 87, установлен выключатель 90, снабженный управляющим приводом 91, подключенным к датчику 34 положения листа, установленному на заднем по ходу движения листа краю поперечного ряда секций 12 камеры разрежения 2, в котором находится данная секция 12.
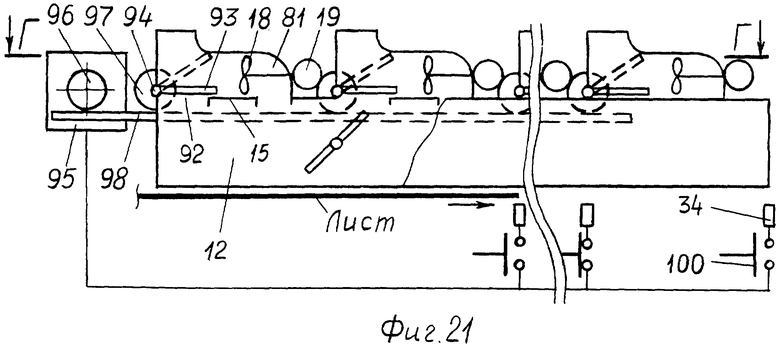
Для ускорения отрыва листа от камеры разрежения 2 с целью повышения производительности данного устройства в каждой секции 12 его камеры разрежения выпускной патрубок 81 (фиг.21) примыкает к верхней стенке 15, в которой выполнено впускное отверстие 92, сообщающее внутреннюю полость секции с выпускным патрубком 81, в котором размещен двухпозиционный клапан 93, при этом эжектор 8 (например, вентилятор 18) размещен в выпускном патрубке 81 перед впускным отверстием 92 по ходу движения потока воздуха в указанном патрубке. В своем исходном закрытом положении клапан 93 перекрывает впускное отверстие 92 верхней стенки 15, а при его переводе в открытое положение он открывает отверстие 92 и одновременно перекрывает проход воздуха с выхода вентилятора 8 на выход выпускного патрубка 81 и обеспечивает проход воздуха с выхода вентилятора 8 в секцию 12 через впускное отверстие 92 в ее верхней стенке 15. Двухпозиционные клапаны 93 могут быть выполнены в виде поворотных заслонок. При этом клапаны 93 каждого поперечного ряда секций 12 камеры разрежения 2 могут быть установлены на общей оси вращения 94 (фиг.22). Оси вращения 94 клапанов 93 всех поперечных рядов секций 12 камеры разрежения могут быть снабжены общим приводом 95 поворотного действия, выходной вал которого может иметь зубчатое или ременное соединение с осями вращения 94. При использовании зубчатого соединения на выходном валу привода 95 устанавливается ведущая шестерня 96, а на концах осей вращения 94 - ведомые шестерни 97, взаимодействующие с подвижной зубчатой рейкой 98, получающей возвратно-поступательное движение от ведущей шестерни 96, а при использовании ременного соединения на концах осей вращения 94 вместо шестерней 97 крепятся шкивы, охваченные общим ремнем, при этом выходной ведущий вал привода 95 соединяется с одной из осей вращения 94, шкив которой выполняет роль ведущего шкива, передающего через ремень движение всем остальным шкивам осей вращения 94. Возможно также использование для перемещения клапанов 93 привода 95 возвратно-поступательного действия, выходной силовой шток которого соединен с длинной зубчатой рейкой 98, взаимодействующей с шестернями 97, или с короткой зубчатой рейкой (не показана), взаимодействующей своими зубьями с ведущей шестерней, установленной на конце одной из осей вращения 94, каждая из которых снабжена установленным на ее конце шкивом, при этом шкивы всех осей вращения 94 охвачены одним ремнем, через который поворотное движение с ведущей шестерни передается всем шкивам и соединенным с ними осям вращения 94. При любом из представленных вариантов исполнения трансмиссии обеспечивается возможность одновременного перевода клапанов 93 всех секций 12 камеры разрежения 2 из закрытого в открытое положение и наоборот.
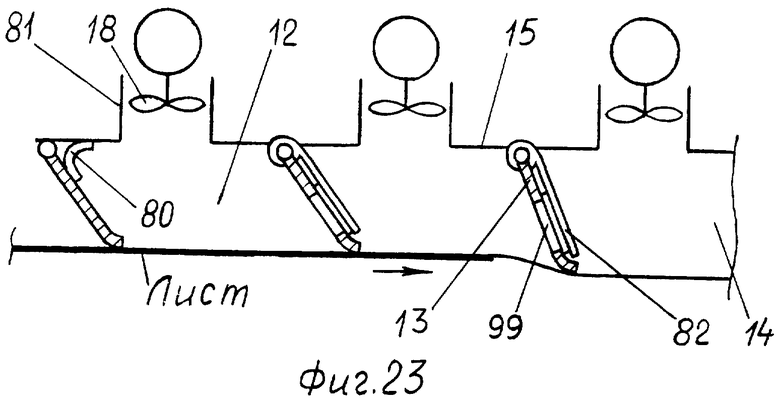
Для снижения энергозатрат на работу эжекторов 8 за счет повышения степени герметичности секций 12, перекрытых движущимся листом, так же, как и в первом варианте устройства (фиг.16), в данном варианте в каждой секции 12 камеры разрежения 2 поперечные боковые стенки 13 (фиг.23) могут быть выполнены с возможностью их взаимодействия с движущимся листом с поворотом указанных стенок относительно верхней стенки 15 секции в направлении движения листа, а продольные боковые стенки 14 могут быть выполнены из материала, способного изменять свою геометрическую форму при взаимодействии указанных стенок с движущимся листом (например, из эластичной резины, ткани, полимерной пленки, прорезиненной ткани и т.п.) с обеспечением возможности облегания их нижними торцами поверхности указанного листа. При этом стенки 13 снабжены пружинами 80 для их возврата в исходное положение вместе со стенками 14, а в каждом продольном ряду секций 12 камеры разрежения 2 в боковой стенке 13 выполнено перепускное окно 99, перекрываемое запорным клапаном 82 в его исходном положении, при этом стенка 13 и клапан 82 могут вращаться вокруг одной оси.
В представленных вариантах предлагаемого устройства каждый из приводов 74 (фиг.13), 79 (фиг.15) и 95 (фиг.21) в системе реверсирования потока воздуха на выходе эжектора 8 (например, вентилятора 18) может быть подключен, по меньшей мере, к одному из датчиков 34 положения листа через выключатель 100, при этом расположение датчика 34 на камере разрежения 2, к которому подключается каждый из указанных приводов, определяется длиной листа, измеряемой в направлении его движения. При самой большой длине укладываемых листов, равной или близкой длине камеры разрежения 2, измеряемой в направлении движения листа, с приводом 74, 79 или 95 соединяется последний по ходу движения листа датчик 34, а при укладке самых коротких листов, длина которых равна или близка по величине длине двух первых по ходу листа секций 12, измеряемой в направлении движения листа, с указанным приводом соединяется датчик 34, расположенный между вторым и третьим по ходу движения листа поперечными рядами секций 12. При необходимости укладки в штабель листов, имеющих промежуточную длину, к приводу 74, 79 или 95 может быть присоединен один из датчиков 34, расположенных между указанными крайними датчиками. При работе устройства в режиме укладки листов с помощью выключателя 100 к приводу 74, 79 или 95 подключается тот датчик 34, расположение которого на камере разрежения 2 соответствует длине укладываемых листов, а остальные датчики 34 отключаются от указанного устройства с помощью выключателя 100. При работе же устройства в режиме транспортировки листов система реверсирования потока воздуха на выходе эжектора блокируется путем выключения всех выключателей 100.
Каждый из приводов 54 (фиг.2), 30 (фиг.5), 33 (фиг.6), 74 (фиг.13), 79 (фиг.15), 84 (фиг.18) и 95 (фиг.21) может быть выполнен, например, в виде механического, электрического, электромеханического, электромагнитного, гидравлического, пневматического или другого типа привода, а в качестве датчиков 34 (фиг.6) и 38 положения движущегося листа могут быть использованы, например, механические, электрические, электромагнитные, электромеханические, оптические (световые), ультразвуковые, пневматические и т.п. датчики. При этом клапаны 52 (фиг.2), 17, 72 (фиг.13), 77 (фиг.15), 82 (фиг.19) и 93 (фиг.21) могут быть снабжены возвратными пружинами (не показаны), возвращающими их в исходное закрытое положение. В представленных устройствах возможны и другие варианты исполнения системы управления положением клапанов 17, 72, 77, 82 и 93, отличающиеся от вариантов, показанных на фиг.6, 13, 15, 19 и 21, и основанные на известных технических решениях, используемых в системах автоматического управления и регулирования различных устройств, машин и механизмов. При этом конкретное исполнение системы управления указанными клапанами определяется главным образом материалом (металл, фанера, пластик, картон и т.п.) укладываемых и транспортируемых листов, а также выбранным типом приводов этих клапанов и выбранным типом датчиков 34 и 38 положения движущегося листа, взаимодействующих с приводами клапанов. Любой из приводов 33, 74, 79, 84 и 95 указанных клапанов может быть снабжен управляющим устройством, подключенным к датчикам 34 и 38 (не показано).
Для удобства обслуживания устройства выключатели 40 (фиг.6), 85 (фиг.19) и 100 (фиг.13, 15 и 21) могут быть размещены на пульте его управления, а для снижения энергозатрат на привод транспортера 3 (фиг.2 и 18) за счет уменьшения силы трения между движущимся листом и нижней торцевой частью 101 камеры разрежения 2 указанная торцевая часть последней может быть выполнена из материала, имеющего небольшой коэффициент трения, например из фторопласта.
В любом из представленных вариантов устройства передний упор 10 (фиг.17) подъемного стола 9 может быть выполнен с возможностью регулировки его положения в направлении движения листа при необходимости укладки на стол 9 листов различной длины. Для этого упор 10 может быть снабжен гайкой 102, перемещаемой по направляющей 103, и приводом 104 с винтом 105, взаимодействующим с гайкой 102. При включении привода 104 его винт 105 перемещает гайку 102 вместе с упором 10 в сторону заднего упора 11 стола - при уменьшении длины укладываемых листов или в обратном направлении - при увеличении указанной длины.
Устройство работает следующим образом.
В исходном положении устройства, работающего в режиме укладки листов в штабель (фиг.1), расстояние между передним 10 и задним 11 упорами подъемного стола 9 устанавливается равным длине укладываемых листов путем регулировки положения упора 10 с помощью привода 104 (фиг.17), а в каждой из систем реверсирования потока воздуха на выходе эжектора 8 (например, вентилятора 18) (фиг.13 - 15) включается один из выключателей 100, установленный в выходной линии датчика 34, расположенного вблизи переднего упора 10 подъемного стола 9. При этом выключатели 40 (фиг.6) и остальные выключатели 100 выключены, выключатели 36 (фиг.6) включены, а клапаны 17 (фиг.1) и 72 (фиг.13) или 77 (фиг.15) закрыты.
После включения эжектора 8 (фиг.1) и транспортера 3 лист транспортером 1 подается под камеру разрежения 2. В момент перекрытия движущимся листом первого по ходу его движения поперечного ряда секций 12 камеры разрежения датчик 34 (фиг.6), установленный на заднем по ходу движения листа краю указанного ряда секций 12, вырабатывает сигнал, поступающий по выходной линии 35 к приводу 33, который переводит в открытое положение запорные клапаны 17 данного ряда секций 12. При дальнейшем перемещении листа под камерой разрежения 2 аналогичным образом последовательно открываются запорные клапаны 17 всех остальных поперечных рядов секций 12 камеры разрежения. При этом в любом положении листа, занимаемом им в процессе движения под камерой разрежения, воздух, находящийся внутри секций 12, перекрытых движущимся листом, эжектируется из них с помощью эжектора 8 через выпускные окна 16 верхних стенок 15 указанных секций, в результате чего внутри указанных секций образуется разрежение, а на движущемся листе возникает перепад давления, создающий подъемную силу, удерживающую лист под камерой разрежения 2 и прижимающую его к транспортеру 3, который перемещает лист под указанной камерой.
После разгерметизации первого по ходу движения листа поперечного ряда секций 12 камеры разрежения 2 при выходе заднего края листа из под указанного ряда секций 12 разрежение внутри всех секций 12 камеры разрежения 2 падает и лист под действием силы тяжести отрывается от камеры разрежения 2 и укладывается в штабель на столе 9. В устройстве, снабженном системой реверсирования потока воздуха на выходе вентилятора 18 (фиг.13-15), при достижении передним краем движущегося листа зоны расположения датчика 34 с включенным выключателем 100 указанный датчик вырабатывает сигнал, поступающий на привод 74 (фиг.13), переводящий в открытое положение клапан 72, или на привод 79 (фиг.15), переводящий в открытое положение клапан 77, что приводит к быстрому падению давления в секциях 12 камеры разрежения, благодаря чему ускоряется отрыв листа от камеры разрежения 2, что способствует повышению производительности устройства.
После отрыва листа от камеры разрежения 2 сигналы от датчиков 34 прекращаются и приводы 33 и 74 или 79 возвращаются в исходное положение и вместе с ними возвращаются в исходное закрытое положение клапаны 17 и 72 или 77. Укладка последующих листов производится в описанной последовательности. По мере набора штабеля листов стол 9 периодически опускается в автоматическом режиме.
В исходном положении устройства, работающего в режиме транспортировки листов, выключатели 36 и 40 (фиг.6) включены, выключатели 100 (фиг.13 и 15) выключены, а клапаны 17 (фиг.1) и 72 (фиг.13) или 77 (фиг.15) закрыты. После включения эжектора 8 и транспортеров 3 и 42 лист подается транспортером 1 под камеру разрежения 2 с поочередным открытием в описанном выше порядке запорных клапанов 17 секций 12 камеры разрежения с созданием на листе за счет разрежения подъемной силы, удерживающей его под камерой разрежения 2 и прижимающей лист к транспортеру 3, перемещающему последний в сторону транспортера 42. При выходе заднего края листа из зоны расположения датчика 38 (фиг.6), установленного перед первым по ходу движения листа поперечным рядом секций 12 камеры разрежения, указанный датчик вырабатывает сигнал, поступающий по выходной линии 39 к управляющему приводу 37, который выключает выключатель 36. При этом сигнал от датчика 34 прерывается и привод 33 возвращается в исходное положение и вместе с ним возвращаются в исходное закрытое положение запорные клапаны 17 указанного ряда секций 12, благодаря чему исключается разгерметизация воздушного коллектора 6 и падение разрежения в остальных секциях 12 камеры разрежения, перекрытых движущимся листом, при выходе заднего конца последнего из под первого поперечного ряда секций 12. При выходе заднего края листа из зоны расположения следующего датчика 38 последний вырабатывает сигнал, поступающий по выходной линии 39 на второй управляющий вход указанного привода 37, который возвращает в исходное включенное положение выключатель 36. В таком же порядке последовательно закрываются запорные клапаны 17 и возвращаются в исходное положение выключатели 36 остальных поперечных рядов секций 12 в процессе движения листа под камерой разрежения 2 с последующей его передачей на транспортер 42 или рядом расположенное устройство для укладки и транспортировки листов. Транспортировка последующих листов производится в описанной последовательности. При необходимости транспортировки листов со стола 9 включают эжектор 8 и транспортеры 3 и 42 и поднимают стол 9 со стопой уложенных на него листов. При приближении верхнего листа стопы к камере разрежения 2 датчики 34 вырабатывают сигналы, поступающие на приводы 33, открывающие клапаны 17, после чего в секциях 12 камеры разрежения 2, перекрытых снизу листом, создается разрежение, притягивающее лист к лентам транспортера 3, который передает лист на транспортер 42. В процессе перемещения листа под камерой разрежения клапаны 17 последовательно закрываются в том же порядке, как и при транспортировке листов с транспортера 1 на транспортер 42.
При работе устройства как в режиме укладки, так и в режиме транспортировки листов с увеличением дискретного хода Х (фиг.1) листа в процессе его перемещения под камерой разрежения 2 суммарный объем внутренних полостей секций 12 последней и суммарная площадь щелей между листом и нижним торцом камеры разрежения увеличиваются. В результате этого при недостаточной производительности эжектора 8 величина разрежения р внутри воздушного коллектора 6 и внутри соединенных с ним секций 12 камеры разрежения, перекрытых движущимся листом, может понизиться до уровня, при котором лист может раньше времени оторваться от камеры разрежения. При избыточной же производительности эжектора 8 указанное разрежение р напротив может оказаться чрезмерно высоким и при этом неоправданно высокими окажутся энергозатраты на работу эжектора и вместе с тем увеличится свыше необходимого уровня усилие прижатия листа к движителям транспортера 3, что вызовет чрезмерно высокое трение листа о нижний торец камеры разрежения и связанные с ним повышенные энергозатраты на привод транспортера 3 и может также привести к появлению остаточных деформаций листов (особенно у тонких листов) и натиров на их поверхности. Для исключения указанных негативных моментов в работе устройства текущее значение величины разрежения р в процессе перемещения листа под камерой разрежения может регулироваться в автоматическом режиме в зависимости от текущего значения величины дискретного хода Х листа с поддержанием заданных оптимальных текущих значений p(opt)1, p(opt)2,... p(opt)m указанного разрежения, соответствующих текущим значениям X1, Х2,... Хm дискретного хода листа и обеспечивающих наименьшие энергозатраты на работу эжектора 8 и транспортера 3 с исключением повреждений листов и их преждевременного отрыва от камеры разрежения. Поддержание оптимального значения величины разрежения р в процессе работы устройства может осуществляться за счет регулирования объемного расхода Q воздуха, эжектируемого с помощью эжектора 8 из секций 12 камеры разрежения 2, перекрытых движущимся листом. Регулирование величины расхода Q может выполняться с помощью регулятора 43 (фиг.7) и его управляющего устройства 44, программное устройство 48 которого получает информацию о текущем значении величины дискретного хода Х листа от датчиков 34 через преобразователи 68 и о текущем значении величины разрежения р - от датчика 45 через преобразователь 49. В программном устройстве 48 получаемая информация обрабатывается по заданной программе и по результатам обработки вычисляется поступающее на выход устройства 48 оптимальное текущее значение величины расхода Q как функция ряда вышеуказанных параметров
Q(opt)=f(k1, k2,... kn, р, X, h, l, δ , γ , μ V).
С выхода программного устройства 48 информация о величине Q(opt) поступает на вход блока коррекции 47, через второй вход которого поступает информация о текущей величине расхода Q от датчика 46 через преобразователь 50. В блоке коррекции 47 текущая величина расхода Q сравнивается с его оптимальной текущей величиной Q(opt) и после сравнения на выходе указанного блока вырабатывается корректирующий сигнал Δ Q, отражающий разницу указанных величин. Сигнал Δ Q через преобразователь 51 поступает с блока коррекции 47 к регулятору 43, который устанавливает производительность эжектора 8 на уровне, обеспечивающем поддержание текущего значения расхода Q воздуха, эжектируемого из секций 12 камеры разрежения 2, на его оптимальном уровне Q(opt). При этом с увеличением текущего значения величины дискретного хода Х листа по мере его продвижения под камерой разрежения 2 управляющее устройство 44 с регулятором 43 увеличивают текущее значение величины расхода Q для поддержания текущего значения величины действующего над движущимся листом разрежения р на заданном оптимальном уровне p(opt).
При использовании в качестве эжектора 8 вентилятора 18 поддержание оптимального значения величины разрежения р в процессе работы устройства может осуществляться также по двум другим способам. По первому из них разрежение р поддерживается на оптимальном уровне p(opt) за счет регулирования площади S проходного сечения перепускного клапана 52 (фиг.8) с помощью привода 54, получающего управляющие сигналы с управляющего устройства 55. При этом в программное устройство 57 последнего поступает информация о текущем значении величины дискретного хода Х листа от датчиков 34 через преобразователи 68. Вместе с тем в программное устройство 57 с помощью устройства 58 вводится величина объемного расхода Q воздуха, эжектируемого через вентилятор 18. Указанная величина расхода Q может вводиться в программное устройство 57 заранее (при настройке предлагаемого устройства до его включения в работу) при помощи ручки 63 (фиг.9) устройства ручного ввода, указатель 64 которой устанавливается напротив цифрового или уровневого значения Q на шкале 62, соответствующего реальной производительности вентилятора 18. Данный способ ввода Q удобно использовать в случае, когда величина Q не изменяется в процессе работы устройства. В случае изменения величины Q при работе устройства ее значение может вводиться в программное устройство 57 при помощи датчика 46 (фиг.10) расхода Q через преобразователь 65. В программном устройстве 57 вводимая с помощью устройства 58 информация о текущем значении величины Q обрабатывается по заданной программе и по результатам обработки вычисляется поступающее на выход устройства оптимальное текущее значение разрежения р как функция ряда параметров
p(opt)=f(k1, k2,... kn, Q, X, h, l, δ , γ , μ , S0, V).
С выхода программного устройства 57 информация о величине p(opt) поступает на вход блока коррекции 56, через второй вход которого поступает информация о текущей величине разрежения р от датчика 45 через преобразователь 59. В блоке коррекции 56 текущая величина разрежения р сравнивается с его оптимальной текущей величиной p(opt) и после сравнения на выходе блока вырабатывается корректирующий сигнал Δ р, отражающий разницу указанных величин. С помощью преобразователя 60 сигнал Δ р трансформируется в управляющий сигнал Δ S, соответствующий величине площади проходного сечения клапана 52, которая должна обеспечить оптимальную величину разрежения p(opt) над движущимся листом. Сигнал Δ S поступает на регулируемый привод 54, который перемещает клапан 52 в положение, соответствующее указанной площади его проходного сечения, обеспечивающей достижение оптимального разрежения p(opt). При этом с увеличением текущего значения величины дискретного хода Х листа по мере его продвижения под камерой разрежения управляющее устройство 55 с регулируемым приводом 54 уменьшают площадь S проходного сечения клапана 52 для поддержания разрежения р на оптимальном уровне p(opt).
По второму способу разрежение р над движущимся листом при использовании в качестве эжектора 8 вентилятора 18 поддерживается в процессе работы устройства на оптимальном уровне за счет комбинированного регулирования параметров S и Q. При использовании данного способа весь период движения листа под камерой разрежения разбивается на два этапа. На первом начальном этапе движения листа разрежение р поддерживается на оптимальном уровне p(opt) за счет регулирования площади S перепускного клапана 52 (фиг.11) с помощью привода 54, получающего управляющие сигналы с управляющего устройства 66, программное устройство 67 которого получает информацию о текущем значении величины дискретного хода Х листа от датчиков 34 через преобразователи 68 и о текущем значении величины расхода воздуха Q - от датчика 46 через преобразователь 65. В программном устройстве 67 получаемая информация обрабатывается по заданной программе и по результатам обработки вычисляется поступающее на выход устройства оптимальное текущее значение разрежения как функция ряда параметров
p(opt)=f(k1, k2,... kn, Q, X, h, l, δ , γ , μ , S0, V).
В блоке коррекции 56 текущая величина разрежения р, поступающая от датчика 45 через преобразователь 59, сравнивается с его оптимальной величиной p(opt) и после сравнения на выходе блока вырабатывается корректирующий сигнал Δ р, поступающий через преобразователь 60 на регулируемый привод 54, изменяющий положение клапана 52 и его площадь S в соответствии с поступающим корректирующим сигналом Δ S. При этом с увеличением текущего значения величины дискретного хода Х листа по мере его продвижения под камерой разрежения управляющее устройство 66 с регулируемым приводом 54 уменьшают площадь S проходного сечения клапана 52 и в конце первого этапа движения листа после перекрытия им заданного числа поперечных рядов секций 12 камеры разрежения 2 полностью закрывают указанный клапан. Заданное число указанных рядов секций 12 камеры разрежения определяется теоретическим и/или опытным путем из условия обеспечения надежной работы устройства без помпажа вентилятора 18 и при наименьших энергозатратах.
На втором этапе движения листа после закрытия клапана 52 разрежение р поддерживается на оптимальном уровне p(opt) за счет регулирования объемного расхода Q воздуха через вентилятор 18 с помощью регулятора 43 и управляющего устройства 66, программное устройство 67 которого получает информацию о текущем значении величины дискретного хода Х листа от датчиков 34 через преобразователи 68 и о текущем значении величины разрежения р - от датчика 45 через преобразователь 49. В программном устройстве 67 получаемая информация обрабатывается и по результатам обработки вычисляется поступающее на выход устройства оптимальное текущее значение величины расхода Q как функция ряда параметров
Q(opt)=f(k1, k2,... kn, р, X, h, l, δ , γ , μ , V).
В блоке коррекции 47 текущая величина расхода Q, поступающая от датчика 46 через преобразователь 50, сравнивается с ее оптимальной величиной Q(opt) и после сравнения на выходе блока вырабатывается корректирующий сигнал Δ Q, поступающий через преобразователь 51 на регулятор 43, который устанавливает расход Q на уровне Q(opt); обеспечивающем выход разрежения р на оптимальный уровень p(opt). При этом с увеличением текущего значения величины дискретного хода Х листа по мере его продвижения под камерой разрежения управляющее устройство 66 с регулятором 43 увеличивают текущее значение величины расхода Q и за счет этого поддерживают текущее значение величины разрежения р над листом на заданном оптимальном уровне p(opt) до конца движения листа под камерой разрежения 2.
При использовании в качестве эжектора 8 вентилятора 18 из представленных трех способов автоматического регулирования разрежения р выбирается такой способ, который при заданных конструктивных параметрах камеры разрежения, заданных геометрических, весовых и фрикционных показателях транспортируемых и укладываемых листов и заданной рабочей характеристике вентилятора обеспечивает устойчивую (без вхождения вентилятора в помпажный режим и без преждевременного отрыва листов от камеры разрежения) и наиболее экономичную (с наименьшими энергозатратами на привод вентилятора 18 и транспортера 3) работу устройства.
При изменении параметров h, l, δ , γ и μ укладываемых и транспортируемых листов, и/или конструктивных параметров k1, k2,... kn камеры разрежения 2, и/или величины исходной (начальной) площади So проходного сечения перепускного клапана 52, и/или скорости V движения транспортера 3 в каждое из программных устройств 48 (фиг.7), 57 (фиг.8) и 67 (фиг.11) вводятся новые значения указанных изменяемых параметров при подготовке предлагаемого устройства к работе.
В устройстве, выполненном с секциями 12 камеры разрежения, имеющими поворотные поперечные боковые стенки 13 (фиг.16) и эластичные продольные боковые стенки 14, лист при своем движении взаимодействует с указанными боковыми стенками секций 12. При этом поперечные стенки 13 поворачиваются относительно верхних стенок 15 секций 12 в направлении движения листа, а продольные стенки 14 облегают своим нижним торцом поверхность движущегося листа, благодаря чему повышается герметичность секций 12 камеры разрежения, перекрытых движущимся листом, за счет чего снижаются энергозатраты на работу эжектора 8. После отрыва листа от камеры разрежения или после его выхода из-под указанной камеры стенки 13 и 14 секций 12 возвращаются с помощью пружин 80 в свое исходное положение.
В другом варианте исполнения предлагаемого устройства при его работе в режиме укладки листов в исходном положении в системе реверсирования потока воздуха на выходе эжекторов 8 (например, вентиляторов 18) (фиг.21) включается один из выключателей 100, установленный в выходной линии датчика 34, расположенного вблизи переднего упора 10 подъемного стола 9. При этом остальные выключатели 100 выключены, выключатели 85 (фиг.19) включены, а клапаны 82 и 93 закрыты.
После включения вентиляторов 18 и транспортера 3 лист транспортером 1 подается под камеру разрежения 2. В дальнейшем устройство работает аналогично устройству по первому варианту исполнения с поочередным открытием клапанов 82 поперечных рядов секций 12 камеры разрежения с помощью приводов 84, взаимодействующих с датчиками 34, с отрывом листа от камеры разрежения и его укладкой в штабель на столе 9 при выходе заднего края листа из-под первого по ходу движения листа поперечного ряда секций 12 камеры разрежения и возвратом клапанов 82 в исходное закрытое положение. В устройстве, снабженном системой реверсирования потока воздуха на выходе вентиляторов 18 (фиг.21), при достижении передним краем листа зоны расположения датчика 34 с включенным выключателем 100 указанный датчик подает сигнал на привод 95, переводящий в открытое положение клапаны 93, что приводит к быстрому падению давления в секциях 12 камеры разрежения, благодаря чему ускоряется отрыв листа от камеры разрежения, что способствует повышению производительности устройства. После отрыва листа от камеры разрежения указанный сигнал от датчика 34 прекращается и привод 95 вместе с клапанами 93 возвращается в исходное положение. Укладка последующих листов производится в той же последовательности.
В исходном положении данного варианта устройства, работающего в режиме транспортировки листов, выключатели 85 и 100 выключены, а клапаны 82 и 93 закрыты. После включения вентиляторов 18 и транспортеров 3 и 42 лист подается транспортером 1 под камеру разрежения 2 и перемещается транспортером 3 в сторону транспортера 42 с удержанием листа под камерой разрежения подъемной силой, создаваемой за счет эжекции воздуха из секций 12 камеры разрежения вентиляторами 18.
При работе устройства как в режиме укладки, так и в режиме транспортировки листов разрежение рi внутри любой i-й секции 12 камеры разрежения 2 может регулироваться в автоматическом режиме с поддержанием заданного оптимального текущего значения pi(opt) указанного разрежения, обеспечивающего наименьшие энергозатраты на работу вентилятора 18 данной секции и транспортера 3 с исключением повреждений листов и их преждевременного отрыва от камеры разрежения. Оптимальное значение величины разрежения pi(opt) поддерживается за счет регулирования объемного расхода Qi воздуха, проходящего через вентилятор данной секции 12, с помощью регулятора 43 (фиг.20) и его управляющего устройства 87, программное устройство 88 которого получает от датчика 45 информацию о текущем значении величины разрежения pi. В программном устройстве 88 получаемая информация обрабатывается по заданной программе и по результатам обработки вычисляется поступающее на выход устройства оптимальное текущее значение величины расхода Qi как функция ряда параметров
Qi(opt)=f(ki1, ki2,... kim, рi, h, l, δ , γ , μ , V).
С выхода программного устройства 88 информация о величине Qi(opt) поступает на вход блока коррекции 47 и сравнивается в нем с текущим значением величины Qi, информация о котором поступает в блок 47 от датчика 46. После сравнения указанных величин на выходе блока 47 вырабатывается корректирующий сигнал Δ Qi, отражающий их разницу. Для снижения энергозатрат на работу вентилятора в период, когда i-я секция камеры разрежения не перекрыта движущимся листом, в указанный период выключатель 90 находится в выключенном положении, а регулятор 43 обеспечивает работу вентилятора 18 на малых оборотах с минимальными энергозатратами. В момент перекрытия данной секции передний край листа входит в зону расположения датчика 34. При этом датчик 34 передает на управляющий привод 91 сигнал на включение выключателя 90 и после указанного включения сигнал Δ Qi передается с блока коррекции 47 на регулятор 43, который после получения указанного сигнала увеличивает текущее значение величины расхода Qi до его оптимального для данной секции значения Qi(opt). После отрыва листа от камеры разрежения 2 или после его выхода из-под i-й секции 12 сигнал от датчика 34 прекращается и привод 91 вместе с выключателем 90 возвращаются в исходное положение. При этом регулятор 43 теряет связь с управляющим устройством 87 и снижает до исходного минимального значения величину объемного расхода Qi воздуха через вентилятор 18.
При изменении параметров h, l, δ , γ и μ листов, и/или конструктивных параметров ki1, ki2,... kim секции 12, и/или скорости V движения транспортера 3 в программное устройство 88 вводятся новые значения указанных изменяемых параметров при подготовке предлагаемого устройства к работе.
Выполнение камеры разрежения устройства с дополнительными продольными рядами секций позволяет исключить возможность поперечного прогиба и остаточной деформации листов, за счет чего сохраняется кондиционность транспортируемых и укладываемых листов, а наличие в устройстве перепускного клапана 52 исключает вредный для работы устройства помпажный режим вентилятора 18, что повышает надежность работы устройства. Наличие в устройстве системы автоматического регулирования разрежения внутри секций 12 камеры разрежения, перекрытых движущимся листом, позволяет оптимизировать работу устройства за счет снижения до оптимального уровня энергозатрат на работу вентилятора 18 и транспортера 3 с сохранением устойчивого режима работы устройства, исключающего вхождение вентилятора 18 в помпажный режим, преждевременный отрыв листа от камеры разрежения и его повреждения. Выполнение секций 12 с поворотными поперечными 13 и эластичными продольными 14 боковыми стенками позволяет снизить потребный объемный расход воздуха через эжектор 8 и, соответственно, энергозатраты на его работу благодаря высокой степени герметичности указанных секций, достигаемой за счет плотного облегания нижним торцом каждой секции 12 поверхности движущегося листа. Наличие же в устройстве системы реверсирования потока воздуха на выходе эжектора 8 позволяет ускорить отрыв листа от камеры разрежения и за счет этого сократить продолжительность рабочего цикла укладки листа и поднять производительность устройства без дополнительных энергозатрат на его работу.
Снабжение каждой секции 12 камеры разрежения индивидуальным эжектором 8 во втором варианте исполнения предлагаемого устройства позволяет использовать в данном устройстве в качестве эжекторов вентиляторы с малой производительностью (например, вентиляторы, встраиваемые в пылесосы), имеющие небольшой вес и габариты и малое энергопотребление, не подверженные помпажу, благодаря чему отпадает необходимость в оборудовании устройства антипомпажными клапанами 52, за счет чего упрощается его конструкция. При этом вентилятор малой производительности способен создавать в небольшом объеме одной секции 12 разрежение, большее по величине, чем разрежение, создаваемое мощным вентилятором, обслуживающим одновременно все секции 12 камеры разрежения 2.
Отмеченные преимущества предлагаемого устройства обеспечат значительный экономический эффект при практическом использовании изобретения.
Изобретение относится к устройствам транспортировки и укладки листов и может быть использовано в металлургической, металлообрабатывающей, деревообрабатывающей, химической, целлюлозно-бумажной и других отраслях промышленности. При укладке листов осуществляют перемещение листа под камерой разрежения с эжектированием из нее воздуха и отрыв листа от камеры за счет снижения в ней разрежения с последующей укладкой листа в штабель или транспортировку листа за пределы камеры разрежения, при этом воздух из камеры разрежения эжектируют посекционно и только из тех секций камеры разрежения, которые перекрыты движущимся листом. Разрежение над листом поддерживают на оптимальном уровне в автоматическом режиме. Устройство содержит механизм для подачи листов и камеру разрежения с приводным транспортером, эжектором и подключенным к последнему воздушным коллектором. В устройстве камера разрежения выполнена многосекционной, при этом каждая ее секция снабжена запорным клапаном, сообщающим ее с воздушным коллектором после перекрытия данной секции движущимся листом. Устройство снабжено системой автоматического регулирования разрежения над движущимся листом и системой реверсирования воздуха с выхода эжектора в камеру разрежения. Каждая секция камеры разрежения устройства может быть снабжена индивидуальным эжектором. Изобретение позволяет снизить в несколько раз потребляемую мощность эжектора и за счет этого значительно сократить энергозатраты на работу устройства и снизить его вес и габариты.2 н. и 15 з.п. ф-лы, 23 ил.
| US 3845950 A, 05.11.1974.GB 1176047 A, 01.01.1970.US 4157177 A, 05.01.1979.SU 1664703 A1, 23.07.1991.SU 927701 A, 15.05.1982. |

