ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к оценке вакуумного привода на основе имеющегося в вакуумном резервуаре степени разрежения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Вакуум может использоваться для управления - или как вспомогательное средство управления - устройствами транспортного средства. К примеру, вакуум может использоваться для того, чтобы помочь водителю включить тормоза транспортного средства, выполнить продувку паров горючего, нагреть и провентилировать приводную систему, и приводы различных клапанов, таких, как перепускной клапан, клапан управления движением заряда (КУДЗ) и т.д. КУДЗ могут быть подсоединены выше по потоку от впускных клапанов цилиндров двигателя, чтобы увеличить или уменьшить движение заряда соответствующего цилиндра, тем самым, соответственно, увеличивая или уменьшая скорость горения в цилиндре. В безнаддувных двигателях вакуум для срабатывания этих клапанов может быть создан впускным коллектором, так как давление во впускном коллекторе часто ниже атмосферного давления. Если разряжения во впускном коллекторе двигателя не достаточно, вакуум для срабатывания этих клапанов может быть получен от вакуумного резервуара.
На клапанах с вакуумным приводом могут периодически выполняться диагностические тесты для обнаружения снижения функциональных характеристик. Например, диагностика, на основе сигнала датчика положения, соединенного с КУДЗ, может определить, что пластину КУДЗ заело в открытом состоянии (или заело в закрытом состоянии). Если датчик положения не показывает изменения состояния в ответ на команду срабатывания, функциональные характеристики привода КУДЗ могут диагностироваться как сниженные. Соответственно, в систему управления может быть установлен диагностический код флага, указывающего на деградацию привода. Однако диагностические тесты могут неправильно диагностировать вакуумный привод как деградировавший, если для вакуумного привода не имеется соответствующего вакуума. В принципе, неправильный диагностический вывод может привести к вводу неверных диагностических кодов, что может повлечь за собой ненужные испытания и издержки. В общем, может возрасти стоимость обслуживания, а это вызовет недовольство потребителя.
Авторы настоящего изобретения увидели вышеуказанную проблему и нашли решение, по меньшей мере, частично снимающую ее. В одном из примеров решения предлагается способ диагностики деградации вакуумного привода. Этот способ содержит указание деградации вакуумного привода на основе оценки притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара, причем оценку выполняют, исходя из потока воздуха, создаваемого каждым из вентиляторов впускной системы, активации вакуумного привода и утечки в процессе работы вакуумного привода. Таким образом, количество ошибок диагностики деградации вакуумного привода, вызванных недостаточной степенью разрежения в вакуумном резервуаре, может быть снижено.
К примеру, двигатель может содержать один или несколько КУДЗ с вакуумным приводом, расположенных во впускном канале ниже по потоку от впускного дросселя и выше по потоку от одного или нескольких впускных клапанов цилиндров. В принципе, КУДЗ могут активироваться вакуумным приводом, который может получать вакуум от впускного коллектора или из вакуумного резервуара. Если коллекторного вакуума не достаточно для срабатывания клапана (клапанов) КУДЗ, дополнительный вакуум может быть получен из вакуумного резервуара. Вакуумный резервуар может быть газодинамически соединен с каждым впускным коллектором двигателя, с всасывающим отверстием вентилятора и с одним или несколькими КУДЗ. Общая степень разрежения в вакуумном резервуаре может быть оценена на основе притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара. Воздух может поступать в вакуумный резервуар, когда активируются КУДЗ и воздух может течь из вакуумного резервуара к впускному коллектору и/или к всасывающему отверстию вентилятора. Если степень разрежения в вакуумном резервуаре, согласно оценке, ниже порогового уровня, то имеющегося вакуума может быть не достаточно для надлежащего привода клапана (клапанов) КУДЗ.
Соответственно, если активация клапана (клапанов) КУДЗ не вызывает изменения показаний датчика положения, соединенного с клапаном (клапанами) КУДЗ, система управления может не указывать, что КУДЗ дефектен. С другой стороны, если степень разрежения в вакуумном резервуаре выше порогового уровня и активация клапана (клапанов) КУДЗ не вызывает изменения показаний датчика положения, клапан(клапаны) КУДЗ может быть определен как дефектный.
Таким образом, деградации вакуумного привода могут быть более точно определены на основе оценки общей степени разрежения в вакуумном резервуаре, соединенном с вакуумным приводом. Определение того, что имеющийся степень разрежения в вакуумном резервуаре ниже желаемого, позволяет связать отказ вакуумного привода с недостатком вакуума в вакуумном резервуаре. Соответственно, может быть снижено количество указаний на деградацию вакуумного привода в процессе диагностики, особенно, когда степень разрежения в вакуумном резервуаре ниже желаемой. В принципе, диагностические программы могут быть завершены без включения индикатора отказа. А это, в свою очередь, может снизить затраты на ненужную и дорогую диагностику и выполнение излишних операций техобслуживания.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На ФИГ. 1 дано схематическое изображение двигателя.
На ФИГ. 2 показано схематическое изображение одного цилиндра внутри двигателя ФИГ. 1.
На ФИГ. 3 представлен пример блок-схемы диагностики деградации вакуумного привода двигателя ФИГ. 1 согласно настоящему изобретению.
На ФИГ. 4а и 4b представлен пример блок-схемы оценки согласно настоящему изобретению объема воздушного наполнения и соответствующего вакуума в вакуумном резервуаре двигателя.
На ФИГ. 5 представлен пример блок-схемы, иллюстрирующий оценку начального объема воздуха в вакуумном резервуаре.
На ФИГ. 6 представлен соответствующий настоящему изобретению пример диагностики вакуумного привода.
ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Нижеследующее описание относится к системам и способам определения деградации клапана с вакуумным приводом, например, клапана управления движением заряда КУДЗ, расположенного во впускном канале системы двигателя, например двигателя, изображенного на ФИГ. 1 и 2. Привод клапана с вакуумным приводом может получать вакуум от впускного коллектора двигателя или из вакуумного резервуара. Деградация привода и/или клапана с вакуумным приводом может быть указана, когда клапан с вакуумным приводом не изменяет состояние при активации. Однако команда срабатывания может не привести к соответствующему изменению состояния клапана, если вакуум в вакуумном резервуаре недостаточен для срабатывания клапана. Степень разрежения в вакуумном резервуаре может быть смоделирована путем оценки притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара (ФИГ. 4а, 4b и 5). Диагностика клапана с вакуумным приводом может базироваться на оценке степени разрежения в вакуумном резервуаре (ФИГ. 3) таким образом, что клапан с вакуумным приводом определяется как дефектный, только если оцененная степень разрежения выше пороговой (ФИГ. 6) и активация не вызывает изменения состояния клапана с вакуумным приводом. Таким образом, несработавший клапан с вакуумным приводом может не рассматриваться как деградировавший, если имеющийся вакуум недостаточен для срабатывания клапана.
На ФИГ. 1 дано схематическое изображение примера системы 100 двигателя, содержащей многоцилиндровый двигатель внутреннего сгорания 10. В качестве неограничивающего примера, система 100 двигателя может входить как часть тяговой системы в пассажирское транспортное средство. Двигатель 10 может управляться, по меньшей мере частично, системой управления 14, содержащей контроллер 12, и вводами водителя 132 транспортного средства через устройство 130 ввода. В этом примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для выдачи пропорционального Положению Педали сигнала (ПП).
Система 100 двигателя может получать всасываемый воздух через впускной канал 42. Впускной канал 42 может содержать воздушный фильтр (не показан). Двигатель 10 может содержать несколько цилиндров 30. В представленном примере двигатель 10 содержит шесть цилиндров с V-образным расположением. Конкретно, шесть цилиндров расположены в двух блоках 13 и 15, причем каждый блок содержит по три цилиндра. В альтернативных примерах двигатель 10 может содержать два или большее число цилиндров, например, 3, 4, 5, 8, 10 или более. Эти различные количества цилиндров могут быть равномерно распределены и расположены в альтернативных конфигурациях, например, V-образной, рядной, с оппозитными цилиндрами и т.д. Каждый цилиндр 30 может быть снабжен топливным инжектором 66. В представленном примере топливный инжектор 66 представляет собой инжектор прямого впрыска в цилиндр. Однако в других примерах топливный инжектор 66 может быть выполнен как инжектор впрыска топлива во впускной канал.
Всасываемый воздух, подаваемый в каждый цилиндр 30 (в настоящем описании называемый также "камера сгорания" 30) через общий впускной коллектор 44, может использоваться для сжигания топлива, а продукты горения могут затем выбрасываться через отдельные для каждого блока выпускные трубопроводы. В представленном примере первый блок 13 цилиндров двигателя 10 может выпускать продукты горения через первый общий выпускной коллектор 56 и общий газоотводный канал 17, а второй блок 15 цилиндров может выпускать продукты горения через второй общий выпускной коллектор 48 и общий газоотводный канал 19.
Впускной канал 42 содержит впускной дроссель 62 с дроссельной заслонкой 64. В этом конкретном примере положение дроссельной заслонки 64 может изменяться контроллером 12 с помощью сигнала, выдаваемого электродвигателю или дроссельному приводу 67, входящему в состав впускного дросселя 62, такую систему обычно называют электронным устройством управления дроссельной заслонкой (ЭУД). Впускной канал 42 может содержать датчик 120 массового расхода воздуха (МРВ) и датчик 121 барометрического давления (БД) для выдачи на контроллер 12 соответственных сигналов МРВ и БД, характеризующих, соответственно, расход воздуха через впускной канал и барометрическое давление. Вентилятор 20 может быть встроен в вентиляционный канал 23, обходящий впускной дроссель 62, как показано. Когда давление в коллекторе ниже по потоку от впускного дросселя 62 меньше давления воздуха выше по потоку от впускного дросселя 62, воздух может войти в вентиляционный канал 23 через его первый конец 27, протечь через вентилятор 20 и выйти во впускной коллектор 44 через второй конец 29 вентиляционного канала 23. Воздух, текущий через вентилятор 20, может создать разрежение в горловине вентилятора 20, что может втянуть воздух из одного или нескольких устройств: вакуумного резервуара 158, тормозного аккумулятора, усилителя тормоза, фильтра паров горючего (не показан) и т.д.
Несколько устройств управления движением заряда (УУДЗ) могут быть расположены во впускном коллекторе 44, причем каждое УУДЗ соответствует одному из цилиндров 30. Как видно на ФИГ. 1, впускной коллектор 44 разделяется на отдельные тракты, соответствующие отдельным цилиндрам 30. Внутри каждого из этих отдельных трактов может быть помещено УУДЗ для управления потоком воздуха в соответствующий цилиндр. Таким образом, каждый из цилиндров 30 может быть газодинамически соединен с одним УУДЗ. В других вариантах осуществления один цилиндр может быть газодинамически соединен с несколькими УУДЗ отступления от объема настоящего изобретения. В некоторых вариантах осуществления устройства УУДЗ могут содержать клапаны, например, показанные на ФИГ. 1; в этом случае устройства могут быть эквивалентно названы: клапаны управления движением заряда КУДЗ 80. КУДЗ 80 может также быть назван: вихревой клапан управления или опрокидывающийся клапан управления.
КУДЗ 80 могут ограничивать подачу воздуха к одному или нескольким цилиндрам 30 для различных целей, включая, но не ограничительно, регулировку турбулентности и скорости горения. В примере ФИГ. 1 каждый КУДЗ 80 может содержать клапанную пластину с вырезом. Возможны и другие конструкции пластины клапана. Заметим, что для целей настоящего изобретения, когда КУДЗ находится в "закрытом" положении, он полностью активирован и клапанная пластина может быть полностью опрокинута в соответствующий канал впускного коллектора 44, приводя тем самым к максимальному ограничению потока воздушного заряда. Альтернативно, когда КУДЗ находится в "открытом" положении, он дезактивирован и клапанная пластина может быть полностью повернута в положение, существенно параллельное потоку воздуха (как изображено на ФИГ. 1), тем самым значительно уменьшая или устраняя ограничение потока воздушного заряда. КУДЗ могут, в принципе, постоянно находиться в своем "открытом" положении и могут активироваться на "закрытие", только когда желательно создание вихрей. Каждый КУДЗ 80 может регулироваться вращающимся валом, поворачивающим клапанную пластину так, что она встает параллельно направлению потока, когда находится в "открытом" положении. В других вариантах осуществления клапан (пластина) каждого КУДЗ 80 может быть встроен в ответвление впускного коллектора 44 таким образом, что ограничение потока воздуха в закрытом положении вызывается концевым шарнирным поворотом КУДЗ 80 в поток воздуха. Возможны и другие исполнения клапана КУДЗ, не отступающие от объема настоящего изобретения.
Как показано на ФИГ. 1, КУДЗ 80 в первом блоке 13 цилиндров двигателя 10 могут быть повернуты вращением вала 71, который может приводиться приводом 77. Аналогично, КУДЗ 80 во втором блоке 15 цилиндров двигателя 10 могут быть повернуты вращением вала 81, который может, в свою очередь, приводиться приводом 75. Приводы 75 и 77 КУДЗ могут быть вакуумными приводами и могут быть газодинамически соединены с вакуумным резервуаром 158 через соответственные каналы. Подвод вакуума к приводам 75 и 77 КУДЗ может быть обеспечен через соответственные каналы 97 и 98 в результате активации соответственных клапанов 87 и 89. Вакуум может быть получен от вакуумного резервуара 158, как показано на ФИГ. 1. Далее, вакуум может также быть получен от впускного коллектора 44 (не показан на ФИГ. 1), в котором может быть существенное разрежение в процессе работы двигателя, например, когда впускной дроссель 62 закрыт или почти закрыт.В одном из примеров клапаны 87 и 89 могут быть электромагнитными клапанами. Изменения положения вращающихся валов 71 и 81 могут быть определены соответственными датчиками положения 85 и 83, которые могут быть соединены с их соответственными вращающимися валами одним из нескольких способов.
Система 100 двигателя может содержать систему управления 14, которая, в свою очередь, содержит контроллер 12 и может быть любой электронной управляющей системой двигателя или транспортного средства, в которое установлена система двигателя. Контроллер 12 может быть выполнен для принятия управляющих решений, исходя, по меньшей мере частично, из входных сигналов от одного или нескольких датчиков 16 внутри системы двигателя, и может управлять приводами на основе этих управляющих решений. К примеру, контроллер 12 может хранить в памяти машиночитаемые команды, и приводы могут управляться путем выполнения этих команд. Например, в число датчиков могут входить: датчик 122 давления воздуха в коллекторе (ДВК), датчик 120 МРВ, датчик 121 БД, датчики положения 83 и 85 и датчик 123 температуры воздуха в коллекторе (ТВК). Примеры исполнительных механизмов включают дроссельный привод 67, топливный инжектор 66, электромагнитные клапаны 87 и 89, подводящие вакуум к приводам, соответственно, 75 и 77 клапанов КУДЗ для регулировки клапанов КУДЗ 80 и т.д. Могут быть добавлены также дополнительные датчики и приводы, как показано на ФИГ. 2.
Система управления 14 с контроллером 12 может содержать машиночитаемые команды для регулирования приводов, в частности, приводов 75 и 77 клапанов КУДЗ. К примеру, активация (т.е. открытие и закрытие) клапанов КУДЗ 80 может зависеть от частоты вращения и нагрузки двигателя, причем нагрузка зависит, помимо прочего, от таких факторов, как давление во впускном коллекторе ДВК, атмосферное давление и температура воздуха. В других примерах активация клапанов КУДЗ 80 может быть откликом на активацию впускного дросселя 62 и может использоваться системой управления для отслеживания нагрузки двигателя. Альтернативно, система управления 14 может хранить команды закрытия и/или открытия клапана (клапанов) КУДЗ 80 в ответ на изменение обеих упомянутых переменных. Далее, активация клапана может быть откликом на температуру, установку опережения зажигания или другие условия, не заданные иначе.
Обратимся теперь к ФИГ. 2; на ней показан один цилиндр 30 многоцилиндрового двигателя 10 варианта осуществления ФИГ. 1. Цилиндр 30 на ФИГ. 2 может быть одним из цилиндров второго блока 15 цилиндров двигателя 10 на ФИГ. 1. В принципе, элементы, ранее введенные на ФИГ. 1, нумеруются аналогичным образом на ФИГ. 2 и повторно не описываются.
Цилиндр 30 (также называемый камерой сгорания 30) двигателя 10 может содержать стенки 32 камеры сгорания, охватывающие поршень 36. Поршень 36 может быть соединен с коленчатым валом 40 так, что возвратно-поступательное движение поршня преобразуется во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен, по меньшей мере, с одним ведущим колесом транспортного средства через промежуточную систему передач (не показана). Далее, с коленчатым валом 40 может быть через маховик (не показан) соединен стартер для запуска двигателя 10.
Как раскрыто выше в связи с ФИГ. 1, камера сгорания 30 может получать всасываемый воздух от впускного коллектора 44 через впускной канал 42 и может выпускать газообразные продукты сгорания через выпускной коллектор 48 и газоотводный канал 19. Впускной коллектор 44 и выпускной коллектор 48 могут селективно соединяться с камерой сгорания 30 через, соответственно, впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера сгорания 30 может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
В этом примере впускной клапан 52 и выпускные клапаны 54 могут управляться кулачковым приводом через соответственные кулачковые приводные системы 51 и 53. Кулачковые приводные системы 51 и 53, каждая, могут содержать один или несколько кулачков, и для изменения работы клапанов могут использоваться одна или несколько систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК), - которые могут управляться контроллером 12. Угловые положения впускного и выпускного распределительных валов могут быть определены датчиками положения 55 и 57, соответственно. Таким образом, положение впускного кулачка может быть определено датчиком положения 55. Положение выпускного кулачка может быть определено датчиком положения 57.
В альтернативных вариантах осуществления впускной клапан 52 и/или выпускной клапан 54 могут управляться электрическим клапанным приводом. К примеру, цилиндр 30 может альтернативно содержать впускной клапан, управляемый электроприводом, и выпускной клапан, управляемый кулачковым приводом, содержащим системы ППК и/или ИФКР. Хотя на ФИГ. 2 представлен один цилиндр 30 второго блока 15 цилиндров в двигателе 10 ФИГ. 1, другие цилиндры 30 каждого из блоков, первого блока 13 и второго блока 15, двигателя 10 могут аналогичным образом содержать впускные/выпускные клапаны, управляемые одной из вышеописанных клапанных приводных систем.
Топливный инжектор 66 показан соединенным непосредственно с камерой сгорания 30 для впрыска топлива прямо в цилиндр пропорционально ширине импульса впрыска топлива (ИВТ), импульс поступает из контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 обеспечивает так называемый «прямой впрыск» топлива в камеру сгорания 30. Топливный инжектор может быть установлен, например, в боковине или в вершине камеры сгорания. Топливо может подаваться к топливному инжектору 66 топливной системой (не показана), содержащей топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления камера сгорания 30 может альтернативно или дополнительно содержать топливный инжектор, расположенный во впускном коллекторе 44 в исполнении, которое обеспечивает так называемый «впрыск топлива во впускной канал» выше по потоку от камеры сгорания 30.
Система 88 зажигания может обеспечивать искру зажигания в камере сгорания 30 с помощью свечи 92 зажигания по сигналу опережения зажигания (ОЗ) от контроллера 12 в выбранных режимах работы. Хотя на ФИГ. изображены элементы искрового зажигания, в некоторых вариантах осуществления камера сгорания 30 - или одна или несколько других камер сгорания двигателя 10 - может работать в режиме воспламенения от сжатия, с искрой зажигания или без таковой.
Впускной коллектор 44 показан соединяющимся с впускным дросселем 62, содержащим дроссельную заслонку 64. В этом конкретном примере положение дроссельной заслонки 64 может изменяться контроллером 12 посредством сигнала, выданного электродвигателю или приводу (дроссельный привод 67 не показан на ФИГ. 2), входящему в состав впускного дросселя 62; эту систему обычно называют электронным устройством управления дроссельной заслонкой (ЭУД). Впускной дроссель 62 может регулировать подачу воздуха из впускного канала 42 во впускной коллектор 44 и камеру сгорания 30, а также в прочие цилиндры двигателя. Положение дроссельной заслонки 64 может передаваться в контроллер 12 с помощью сигналов положения дроссельной заслонки (ПД) датчика 58 положения дроссельной заслонки.
Датчик 126 отработавших газов показан соединенным с газоотводным каналом 19 выше по потоку от устройства 70 очистки отработавших газов. Датчик 126 может представлять собой любой подходящий датчик для выдачи значений воздушно-топливного отношения в отработавших газах, например, линейный кислородный датчик, или УДКОГ (универсальный, или широкодиапазонный, датчик содержания кислорода в отработавших газах), бистабильный кислородный датчик, или датчик содержания кислорода в отработавших газах (ДКОГ), НДКОГ (нагреваемый ДКОГ), датчик оксидов азота NOx, углеводородов НС или окиси углерода СО. Устройство 70 очистки отработавших газов показано расположенным вдоль газоотводного канала 19 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), ловушку NOx, различные другие устройства очистки отработавших газов или сочетания таких устройств.
Как раскрыто в связи с ФИГ. 1, КУДЗ 80 расположен во впускном коллекторе 44, - в канале, ведущем к впускному клапану 52 цилиндра 30. Положение клапана КУДЗ 80 может регулироваться вращением вала, например, вращающегося вала 81 ФИГ. 1, с использованием привода 75 КУДЗ. Изменения положения (или их отсутствие) вращающегося вала и, следовательно, клапанов КУДЗ 80, могут передаваться датчиком положения 83 на контроллер 12. Когда изменение состояния клапана КУДЗ соответствует желаемому, контроллер 12 может активировать электромагнитный клапан 87, подводящий вакуум для срабатывания привода 75 КУДЗ. Вакуум может быть подведен к приводу 75 КУДЗ от вакуумного резервуара 158. Вакуумный резервуар 158 может обеспечивать вакуум исключительно для приводов КУДЗ, как изображено на ФИГ. 1. Следует заметить, что хотя в изображенных схематических примерах ФИГ. 1 и 2 вакуумный резервуар 158 показан расположенным снаружи впускного коллектора 44, но вакуумный резервуар 158 может быть расположен и внутри впускного коллектора 44. Однако трубопровод, соединяющий впускной коллектор и вакуумный резервуар, может быть проведен снаружи. Вакуум может быть вытянут из вакуумного резервуара 158 только в таких условиях, когда коллекторного вакуума (вакуума во впускном коллекторе 44) не достаточно для срабатывания различных вакуумных приводов, например привода 75 КУДЗ. Соответственно, электромагнитный клапан 87 может быть газодинамически соединен каналом 99 и каналом 95 с впускным коллектором 44. В принципе, когда двигатель работает с повышенным вакуумом во впускном коллекторе, степень разрежения в вакуумном резервуаре 158 может быть поднят с использованием канала 95 от впускного коллектора 44 (что будет раскрыто ниже). Вентилятор 20 может быть встроен в канал 23, обходящий впускной дроссель 62 таким образом, что часть воздуха из точки выше по потоку от впускного дросселя 62 может войти в первый конец 27 канала 23, пройти через вентилятор 20 и выйти во впускной коллектор 44 ниже по потоку от впускного дросселя 62. Поток воздуха через вентилятор 20 создает зону низкого давления внутри вентилятора 20, обеспечивая тем самым источник вакуума для вакуумных резервуаров и вакуумных устройств, таких, например, как фильтры паров горючего, усилители тормоза и т.д. Таким образом, вентиляторы (которые альтернативно могут быть названы эжекторами, трубками Вентури, струйными насосами и воздуходувками) это пассивные устройства, способные обеспечить дешевое производство вакуума при использовании в двигательных системах.
Продолжим рассмотрение ФИГ. 2; вакуумный резервуар 158 может получать вакуум от впускного коллектора 44 через канал 95. В канале 95 имеется обратный клапан 60, пропускающий поток воздуха от вакуумного резервуара 158 к впускному коллектору 44 и не пропускающий поток воздуха от впускного коллектора 44 к вакуумному резервуару 158. Воздух может быть втянут из вакуумного резервуара 158, когда вакуум коллектора выше, чем степень разрежения в вакуумном резервуаре 158. Другими словами, когда абсолютное давление во впускном коллекторе 44 ниже абсолютного давления в вакуумном резервуаре, воздух будет течь из вакуумного резервуара во впускной коллектор. При этом степень разрежения в вакуумном резервуаре 158 будет возрастать и, одновременно, степень воздушного наполнения в вакуумном резервуаре 158 будет падать. Нетрудно понять, что повышенный вакуум указывает на пониженное абсолютное давление.
Кроме того, вакуум может быть подведен к вакуумному резервуару 158 от эжектора 20 по каналам 91 и 73. Обратный клапан 61 в канале 91 может пропускать поток воздуха от вакуумного резервуара 158 к вентилятору 20 и не пропускать поток воздуха от вентилятора 20 к вакуумному резервуару 158. Далее, эжектор 20 может также подводить вакуум к тормозному вакуумному резервуару 138, который в изображенном примере связан по текучей среде каналом 94 с усилителем 140 тормоза. Тормозной вакуумный резервуар 138 может также быть назван тормозным аккумулятором. Тормозной вакуумный резервуар 138 может получать вакуум от вентилятора 20 по каналам 73 и 93. Обратный клапан 63 в канале 93 обеспечивает поток воздуха только от тормозного вакуумного резервуара 138 к вентилятору 20 и обеспечивает отсутствие потока воздуха от эжектора 20 к тормозному вакуумному резервуару 138. Аналогично, обратный клапан 65 в канале 94 обеспечивает поток воздуха, только от усилителя 140 тормоза к тормозному вакуумному резервуару 138 и отсутствие потока от тормозного вакуумного резервуара 138 к усилителю 140 тормоза. Усилитель 140 тормоза может также получать вакуум непосредственно от впускного коллектора 44 (не показано). Усилитель 140 тормоза может содержать внутренний вакуумный резервуар и может усиливать силу нажима водителя 132 транспортного средства на тормозную педаль 150, чтобы включить цилиндр для торможения транспортного средства (не показано). Таким образом, следует заметить, что эжектор 20 может обеспечивать вакуум каждому из следующих элементов: тормозному вакуумному резервуару 138 и вакуумному резервуару 158. Далее, вакуумный резервуар 158 (как и тормозной вакуумный резервуар 138) может сохранять более низкое давление, чем давление в коллекторе. В принципе, вакуум, создаваемый вентилятором 20, может быть предпочтительно подведен к тормозному вакуумному резервуару 138, так как он подводит вакуум к усилителю 140 тормоза. К примеру, обратный клапан 63 может иметь большее проходное сечение, чем обратный клапан 61, чтобы создаваемый вентилятором вакуум можно было в большей пропорции подвести к тормозному вакуумному резервуару 138. Следует также заметить, что вакуумный резервуар 158 может не соединяться с датчиком давления. Соответственно, чтобы узнать степень разрежения в вакуумном резервуаре 158, может оказаться желательна модельная оценка, позволяющая определить степень разрежения; эта модель будет далее раскрыта в связи с ФИГ. 3-5.
Контроллер 12 на ФИГ. 1 показан в виде обычного микрокомпьютера, содержащего: микропроцессорное устройство 102 (МПУ), порты 104 ввода/вывода, постоянное запоминающее устройство 106 (ПЗУ), оперативное запоминающее устройство 108 (ОЗУ), энергонезависимое запоминающее устройство 110 (ЭЗУ) и обычную шину данных. Контроллер 12 управляет различными исполнительными механизмами, например, дроссельной заслонкой 64, приводом 75 КУДЗ через посредство электромагнитного клапана 87, топливным инжектором 66 и т.п. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 10 датчиков, среди которых можно назвать: сигнал Температуры Хладагента Двигателя (ТХД) от датчика 112 температуры, связанного с рубашкой 114 охлаждения; сигнал датчика положения 134, соединенного с педалью 130 акселератора для замера положения акселератора, регулируемого водителем 132 транспортного средства; сигнал давления воздуха в коллекторе двигателя (ДВК) от датчика давления 122, соединенного с впускным коллектором 44; сигнал барометрического давления (БД) от датчика давления 121, соединенного с впускным каналом 42; сигнал вакуума в тормозном вакуумном резервуаре 138 от датчика давления 125, сигнал профиля зажигания (ПЗ) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40; показание массового расхода воздуха (МРВ) от датчика 120 массового расхода воздуха; сигнал датчика положения 83, соединенного с вращающимися валами 81, и сигнал положения дросселя (ПД) от датчика 58. Датчик 118 фазы двигателя может за каждый оборот коленчатого вала выдавать заранее заданный ряд равноотстоящих импульсов, по которым может быть определена частота вращения двигателя (ЧВД). На носителе постоянного запоминающего устройства 106 в контроллере 12 могут быть записаны машиночитаемые данные, представляющие собой команды, исполняемые процессором 102 для осуществления способов, раскрытых ниже, а также других вариантов осуществления, которые предполагаются, но не указаны конкретно. Примеры способов и программ раскрыты в настоящем документе со ссылкой на ФИГ. 3-5.
В некоторых вариантах осуществления двигатель может быть соединен с системой электродвигателя/аккумулятора в гибридном транспортном средстве. Гибридное транспортное средство может реализовывать параллельную компоновку, последовательную компоновку, или вариацию этих компоновок, или их комбинацию. Далее, в некоторых вариантах осуществления могут быть использованы другие варианты двигателя, к примеру дизельный двигатель.
Хотя на ФИГ. 2 изображен один цилиндр 30, нетрудно понять, что каждый цилиндр 30 в двигателе 10 может иметь свой собственный набор впускных/выпускных клапанов, топливных инжекторов, свеч зажигания и т.д. Кроме того, в примерах осуществления, раскрытых в настоящем документе, двигатель может быть соединен со стартером (не показан) для запуска двигателя. Стартер может включаться, например, когда водитель поворачивает ключ в выключателе зажигания на рулевой колонке. После запуска двигателя стартер выключается, к примеру, по достижении двигателем 10 заданной частоты вращения за установленное время.
Таким образом, пример системы может содержать двигатель с цилиндром, причем цилиндр связан по текучей среде с впускным каналом через впускной коллектор; клапан управления движением заряда, расположенный во впускном канале ниже по потоку от впускного дросселя; привод, который переводит клапан управления движением заряда из открытого положения в закрытое и обратно; вакуумный резервуар, связанный по текучей среде с каждым приводом, вентилятором и впускным коллектором, а также контроллер с машиночитаемыми командами, хранящимися в долговременной памяти для активации клапана управления движением заряда с помощью клапанного привода.
Обратимся теперь к ФИГ. 3; на ней представлен пример программы 300 диагностики деградации клапана с вакуумным приводом или вакуумного привода, например, КУДЗ или привода КУДЗ. Конкретно, указание деградации привода КУДЗ и/или клапана КУДЗ основывается на оценке степени разрежения в вакуумном резервуаре, который подводит вакуум к приводу КУДЗ, например, в вакуумном резервуаре 158 ФИГ. 1 и 2. Вакуумный резервуар 158 может также быть назван регулирующим резервуаром тракта впускного коллектора, а клапаны КУДЗ могут также быть названы клапанами управления тракта впускного коллектора.
На шаге 302 могут быть определены условия работы двигателя. Условия работы двигателя могут включать частоту вращения двигателя (ЧВД), требуемый крутящий момент, воздушно-топливное отношение, барометрическое давление БД, абсолютное давление воздуха в коллекторе ДВК и т.д. На шаге 304 программы 300 можно определить, выполняются ли условия оценки степени разрежения в вакуумном резервуаре. К примеру, оценка степени разрежения в вакуумном резервуаре может не применяться, когда коллекторного вакуума достаточно для срабатывания приводов КУДЗ. Таким образом, оценка степени разрежения в вакуумном резервуаре может выполняться, когда коллекторного вакуума не достаточно для срабатывания приводов КУДЗ и когда вакуум для активации приводов КУДЗ обеспечивается вакуумным резервуаром.
Если условия оценки степени разрежения не выполняются, программа 300 переходит к шагу 306 отказа от выполнения оценки вакуума резервуара и завершается. С другой стороны, если условия оценки степени разрежения выполняются, программа 300 переходит к шагу 308 оценки степени разрежения (иначе говоря, давления) в вакуумном резервуаре. Программа 400 ФИГ. 4 раскрывает дальнейшие детали, относящиеся к оценке.
Далее, на шаге 310 программа 300 может определить, лежит ли оцененная степень разрежения в резервуаре (также обозначаемая как резервуарный вакуум (РВ)) ниже, чем первый порог, Порог_Р. К примеру, первый порог может составлять вакуум в 7 дюймов (178 мм) рт.ст. В другом примере Порог_Р может составлять вакуум в 6 дюймов (152 мм) рт.ст. Если на шаге 310 определяют, что степень разрежения в вакуумном резервуаре ниже, чем Порог_Р, программа 300 переходит к шагу 312, чтобы указать низкий степень разрежения и установить флаг в системе управления. В принципе, степень разрежения в вакуумном резервуаре может быть повышена при ближайшей представившейся возможности. К примеру, если коллекторный вакуум недостаточно высок, чтобы подвести вакуум к вакуумному резервуару, и если условия работы двигателя позволяют, впускной дроссель может регулироваться на более закрытое положение, чтобы увеличить коллекторный вакуум. Эта регулировка впускного дросселя может сопровождаться соответствующим увеличением частоты вращения двигателя для поддержания мощности двигателя на относительно постоянном уровне. В принципе, этот способ может больше подходить для транспортных средств, оснащенных бесступенчатой трансмиссией. В другом примере расход воздуха через вентилятор может быть повышен таким образом, что вакуум может быть обеспечен вентилятором. Далее, на шаге 314 программа 300 может также установить флаг «не активировать вакуумный привод». В примере, содержащем приводы КУДЗ и клапаны КУДЗ, приводы КУДЗ могут не активироваться, так что клапаны КУДЗ могут поддерживаться в открытом положении и не активироваться на закрытие.
Если на шаге 310 определяют, что степень разрежения в вакуумном резервуаре выше, чем первый порог, Порог_Р, программа 300 переходит к шагу 316, чтобы сохранить в контроллере значение оцененной степени разрежения. Далее, когда за этой оценкой следует активация вакуумного привода (например, привода КУДЗ), программа 300 может на шаге 318 запросить подтверждение того, что соответствующий датчик положения указывает изменение состояния клапана с вакуумным приводом, например клапана (клапанов) КУДЗ. Если ответ ДА, программа 300 переходит к шагу 320, позволяющему определить исправность привода и/или исправность клапана с вакуумным приводом. С другой стороны, если датчик(датчики) положения не показывает изменения состояния клапана с вакуумным приводом (например, клапана (клапанов) КУДЗ) при активации вакуумных приводов, например приводов КУДЗ, то на шаге 322 программа 300 может определить, что привод (или другие связанные с ним элементы оборудования) дефектен. Далее, на шаге 324, может быть установлен флаг, содержащий диагностический код, и может быть включена индикаторная лампочка отказа (ИЛО).
Таким образом, пример системы двигателя, раскрытый выше, может содержать контроллер, хранящий в долговременной памяти машиночитаемые команды для активации клапана управления движением заряда с помощью привода, например привода КУДЗ, и для указания деградации привода, если клапан управления движением заряда не срабатывает в ответ на активацию, когда степень воздушного наполнения в вакуумном резервуаре ниже порога. Степень воздушного наполнения в вакуумном резервуаре связана со степенью разрежения в вакуумном резервуаре. Таким образом, деградация привода может быть указана, если клапан управления движением заряда не срабатывает в ответ на активацию, когда степень разрежения в вакуумном резервуаре выше, чем порог, например, выше, чем первый порог, Порог_Р. Контроллер может также содержать команды для отключения привода и клапана управления движением заряда в ответ на указание деградации. Контроллер может также содержать команды для указания низкого вакуума в вакуумном резервуаре, когда степень воздушного наполнения в вакуумном резервуаре, согласно оценке, выше, чем порог (или когда степень разрежения ниже, чем первый порог, Порог_Р).
Таким образом, путем выявления степени разрежения в резервуаре может быть выполнено более надежное определение деградации вакуумного привода. В принципе, отсутствие соответствующего активации изменения состояния клапана (клапанов) КУДЗ или других элементов с вакуумным приводом может быть вызвано недостаточным вакуумом в резервуаре. Таким образом, в вышеприведенном способе определения деградации не полагаются на простое отсутствие срабатывания вакуумного привода.
Обратимся теперь к ФИГ. 4а и 4b; на них представлена программа 400, иллюстрирующая способ определения степени (или уровня) разрежения в вакуумном резервуаре. В принципе, программа оценивает степень воздушного наполнения в резервуаре и рассчитывает степень разрежения по степени воздушного наполнения. Конкретно, приток воздуха в вакуумный резервуар и отток воздуха из вакуумного резервуара оценивают с учетом: расхода воздуха, создаваемого посредством каждого вентилятора впускной системы; активации вакуумного привода и утечки в процессе работы вакуумного привода. Далее, воздушное наполнение в вакуумном резервуаре может использоваться для определения абсолютного давления в резервуаре, а затем резервуарного вакуума. Нетрудно понять, что в описанном расчете для определения вакуума используется объемный расход воздуха вместо массового расхода - с целью упрощения вычислений. Но и вычисления массового расхода могут использоваться без отступления от объема настоящего изобретения.
На шаге 402 программа 400 может определить, выше ли абсолютное давление воздуха в коллекторе (ДВК), чем ранее оцененное абсолютное давление воздуха в резервуаре (ДВР). К примеру, в качестве ДВР может использоваться самая последняя оценка, которая могла быть сохранена в памяти контроллера. Как раскрыто выше в описании шага 304 программы 300, если ДВК выше, чем ДВР, это может указывать на то, что коллекторного вакуума не достаточно для срабатывания вакуумных приводов в системе двигателя. Далее, если давление во впускном коллекторе ДВК недостаточно низкое, вакуум для срабатывания приводов КУДЗ может обеспечиваться вакуумным резервуаром, например, вакуумным резервуаром 158.
В другом примере входным условием запуска программы 400 может быть подтверждение того, что вакуум в коллекторе, оцененный по разности между барометрическим давлением БД и ДВК (т.е. по величине БД - ДВК), ниже второго порога, Порог_V. Пониженный вакуум в коллекторе может указывать на повышенное абсолютное давление в коллекторе. Другими словами, пониженный степень разрежения означает меньшую степень (или уровень) разрежения. Далее, повышенный вакуум во впускном коллекторе указывает на пониженное (абсолютное) давление во впускном коллекторе. Далее, повышенный вакуум указывает на повышенную степень разрежения. Таким образом, когда вакуум в коллекторе (например, величина БД - ДВК) ниже второго порога, Порог_V, вакуум в коллекторе может оказаться недостаточным для срабатывания вакуумных приводов, например, приводов КУДЗ. В одном из примеров Порог_V может составлять 7 дюймов рт.ст. В другом примере Порог_V может составлять 5 дюймов (127 мм) рт.ст. К примеру, ДВК может быть выше, чем ДВР (или вакуум в коллекторе может быть ниже, чем Порог_V), при высоком ускорении, когда впускной дроссель (например, впускной дроссель 62 двигателя 10) широко открыт.В другом примере давление в коллекторе может расти на пониженных оборотах двигателя при почти полностью открытом впускном дросселе, и, следовательно, вакуума в коллекторе может не хватать для срабатывания вакуумных приводов.
Если на шаге 402 подтверждено, что ДВК не выше, чем ранее оцененное ДВР (или что величина БД - ДВК не ниже, чем Порог_V), программа 400 переходит к шагу 404, чтобы не оценивать и не моделировать степень (или объем) воздушного наполнения в вакуумном резервуаре. Далее, на шаге 405 программа 400 может стереть из памяти контроллера прежние оценки притока воздуха в вакуумный резервуар в результате активаций вакуумного привода, включая расход воздуха, вызванный утечкой. Далее, программа 400 устанавливает ДВР равным замеренному ДВК, после чего завершается. В принципе, так как ДВК не выше, чем ранее оцененное ДВР, вакуум может подаваться от впускного коллектора к вакуумному резервуару, приводя к изменению величины разрежения в вакуумном резервуаре. Таким образом, значение ДВР может быть обновлено на шаге 405 и сделано равным ДВК.
Если на шаге 402 определяют, что ДВК выше, чем ранее оцененное ДВР (или что величина БД - ДВК ниже, чем Порог_V), программа 400 переходит к шагу 406, чтобы извлечь из памяти величину начального воздушного наполнения (V_нач.) в вакуумном резервуаре. Программа 500 ФИГ. 5 может использоваться для определения начального объема воздуха в вакуумном резервуаре. Начальный объем воздуха в вакуумном резервуаре может быть объемом, приведенным к нормальным условиям. В раскрытом ниже способе определения вакуума в вакуумном резервуаре приведением объема воздуха к нормальным условиям можно компенсировать влияние высоты. В принципе, высота нахождения транспортного средства может влиять на давление в коллекторе и резервуарный вакуум.
Далее, на шаге 408 приток воздуха в резервуар может быть оценен на основе ряда последовательных активаций (N) вакуумного привода, когда ДВК ниже ДВР (или когда вакуум в коллекторе ниже, чем Порог_V). К примеру, когда вакуум в коллекторе недостаточен, чтобы обеспечить разрежение для вакуумного привода, например, для приводов 75 и 77 клапанов КУДЗ двигателя 10, подводить вакуум к вакуумным приводам может вакуумный резервуар 158. Каждая активация вакуумного привода может увеличивать воздушное наполнение в вакуумном резервуаре и, одновременно, снижать степень разрежения в вакуумном резервуаре. Подсчитав количество (N) активаций, которые исчерпывают вакуум в вакуумном резервуаре, можно рассчитать общий объем воздуха (ОВ), введенного в резервуар за N активаций. Конкретно, общий объем воздуха, ОВ, введенного в вакуумный резервуар за N активаций вакуумного привода, можно рассчитать, умножив N на объем воздуха (V_OB), поступающего в вакуумный резервуар за одну активацию вакуумного привода, как показано на шаге 410.
Заранее известный объем воздуха, поступающего в вакуумный резервуар за каждую активацию вакуумного привода, V_OB, может быть откалиброван на месте. При калибровке на месте, двигатель может быть выключен после подтверждения того, что вакуумный резервуар достиг определенного степени разрежения. Этот определенный степень разрежения может быть таким, чтобы было возможно заданное количество активаций вакуумного привода. В принципе, подтверждение того, что в вакуумном резервуаре создан вакуум, может быть получено с использованием датчика давления, соединенного с вакуумным резервуаром при калибровке на месте. Датчик давления может показывать давление в вакуумном резервуаре в начале калибровки. Далее, когда двигатель выключен, он может остановиться, и транспортное средство может пребывать с выключенным двигателем. После выключения двигателя могут быть произведены (и сосчитаны) последовательные активации вакуумного привода (например, привода КУДЗ); это может продолжаться до тех пор, пока не перестанут наблюдаться изменения сигнала датчика положения, указывая, что активация уже не вызывает изменения состояния клапана с вакуумным приводом. Далее, давление в вакуумном резервуаре после последовательных активаций (например, после S активаций) может быть определено с помощью датчика давления, соединенного с вакуумным резервуаром. При выключенном двигателе, вакуума в коллекторе может не быть, и активация вакуумного привода может «втянуть» вакуум только из вакуумного резервуара. Конкретно, активация приводов КУДЗ для изменения состояния клапанов КУДЗ может использовать вакуум только из вакуумного резервуара 158 ФИГ. 1 и 2. Таким образом, объем притока воздуха за активацию может быть откалиброван подсчетом количества (например, S) активаций, которое можно провести при выключенном двигателе до исчерпания вакуума в вакуумном резервуаре. При этом, чтобы оценить V_OB, на шаге 412 можно разделить изменение давления в вакуумном резервуаре после последовательных активаций на сосчитанное количество активаций, например S. Таким образом, общий объем воздуха ОВ, можно рассчитать по формуле:

После определения общего объема воздуха ОВ в вакуумном резервуаре программа 400 переходит к шагу 414, чтобы оценить объем утечки воздуха. В процессе активации привода КУДЗ дополнительный объем воздуха может утечь в вакуумный резервуар. Уточним: в процессе активации привода КУДЗ вакуум может уходить из вакуумного резервуара 158 к вакуумному приводу 75 через канал 97. В принципе, воздух может быть втянут в вакуумный резервуар в ходе активаций. Канал 97 (и подобные каналы) могут быть выполнены в виде шлангов или подобных трубопроводов, и в этих шлангах может быть создан вакуум. Далее, вакуум может быть создан в пространстве, прилегающем к мембране привода КУДЗ. В принципе, в соединениях и стыках каналов (или шлангов) с приводами и каналов с вакуумным резервуаром могут происходить небольшие утечки. Так как каналы вакуумируются только в процессе активации вакуумного привода, скорость утечки может моделироваться только в процессе активации клапанов с вакуумным приводом.
Объем утечки воздуха (ОУ) в вакуумный резервуар может определяться общей длительностью N активаций и заранее определенной скоростью утечки (СУ), как показано на шаге 416. Уточним: суммарное время активации вакуумного привода в ходе N активаций может быть отслежено для определения общей длительности N активаций. Далее, скорость утечки (СУ) может быть измерена до испытаний на месте, аналогично калибровке V_OB. Двигатель может быть выключен и может оставаться выключенным после подтверждение того, что вакуум присутствует в вакуумном резервуаре. Далее, давление в вакуумном резервуаре может быть замерено до калибровки датчиком давления, соединенным с вакуумным резервуаром. Далее, на шаге 418 может выполняться непрерывная активация вакуумного привода, и длительность активации может измеряться до тех пор, пока вакуум в вакуумном резервуаре не будет исчерпан. Датчик давления может замерять существующее давление в вакуумном резервуаре в конце калибровки, и может быть оценено изменение давления в вакуумном резервуаре от начала калибровки до ее конца. Скорость утечки СУ может быть оценена делением изменения давления в вакуумном резервуаре на длительность непрерывной активации до исчерпания резервуара. Таким образом, объем утечки воздуха ОУ в вакуумный резервуар в процессе N активаций может быть определен умножением суммарного времени N активаций на скорость утечки СУ.

Далее, можно рассчитать отток воздуха из резервуара к вентилятору, например, к вентилятору 20 двигателя 10. На шаге 420 может быть вначале подтверждено, что двигатель включен и вакуум в коллекторе выше, чем третий порог, Порог_А. Как было отмечено выше, вакуум в коллекторе может быть определен как разность между барометрическим давлением и абсолютным давлением воздуха в коллекторе (например, БД - ДВК). Вентилятор, подсоединенный в обход впускного дросселя, может создать разрежение, используя существующий во впускном канале поток воздуха. Далее, поток воздуха во впускном канале двигателя может иметь место, когда двигатель включен и давление во впускном коллекторе ниже атмосферного давления (замеренного как БД). Далее, вентилятор может создать достаточный вакуум, только когда разность между давлением в коллекторе и атмосферным давлением, по меньшей мере, достигает величины Порог_А. В одном из примеров Порог_А может составлять 3 дюйма (76 мм) рт.ст. В другом примере Порог_А может составлять 4 дюйма (102 мм) рт.ст. Если на шаге 420 подтверждено, что двигатель включен и разность БД - ДВК больше, чем третий порог, Порог А, программа 400 переходит к шагу 422, чтобы оценить отток воздуха к эжектору (ОВЭ) из вакуумного резервуара. Уточним: вакуум, создаваемый вентилятором, может втягивать воздух из вакуумного резервуара в вентилятор и оттуда во впускной канал. Таким образом, степень разрежения в вакуумном резервуаре может быть повышена за счет вентиляторного вакуума.
Отток воздуха ОВЭ из вакуумного резервуара, вызванный вакуумом эжектора, можно рассчитать, исходя из длительности подвода вакуума вентилятором к вакуумному резервуару для КУДЗ, например, к вакуумному резервуару 158, скорости всасывания вентилятора и оттока воздуха, из тормозного аккумулятора или тормозного вакуумного резервуара, который питает усилитель тормоза, например, из тормозного вакуумного резервуара 138, соединенного с двигателем 10. На шаге 424 отток ОВЭ можно рассчитать, если из произведения длительности подвода вакуума вентилятором и скорости всасывания (СВ) вентилятора вычесть отток воздуха АВВ из тормозного вакуумного резервуара (тормозного аккумулятора), который питает усилитель тормоза.

Вентилятор 20 в варианте осуществления двигателя ФИГ. 2 обеспечивает вакуумом как вакуумный резервуар 158, так и тормозной вакуумный резервуар 138, поэтому вакуум, создаваемый вентилятором 20, может быть в обоих резервуарах. Таким образом, в течение подвода вакуума вентилятором, в оценку воздушного наполнения вакуумного резервуара 158, который подводит вакуум для приводов КУДЗ, может не входить - и, следовательно, из оценки может вычитаться - воздух, всосанный из тормозного вакуумного резервуара 138 (или вакуум, подаваемый к тормозному вакуумному резервуару 138),. Отток воздуха из тормозного вакуумного резервуара 138 (или тормозного аккумулятора) может измеряться на шаге 426 датчиком давления, например, датчиком давления 125 на ФИГ. 2, подсоединенным к тормозному вакуумному резервуару 138. Программа 400 затем переходит к шагу 432.
Вернемся теперь к шагу 420; если программа 400 определяет, что двигатель не включен и что вакуум в коллекторе (определяемый как разность БД - ДВК) ниже, чем Порог_А, вакуум, создаваемый вентилятором, может оказаться недостаточным. В одном из примеров двигатель может быть выключен и остановлен. Если вакуум в коллекторе ниже, чем Порог_А, во впускном канале может не быть соответствующего потока воздуха, вследствие чего вентилятором может создаваться низкий вакуум - или не создаваться вообще. Однако любой вакуум, создаваемый эжектором и подаваемый к вакуумному резервуару 158, т.е. ОВЭ (оцененный на шаге 424 по формуле 3), до выключения двигателя или до падения степени разрежения в коллекторе ниже значения Порог_А может быть сохранен в памяти контроллера на шаге 428, и дальнейшая оценка величины ОВЭ может быть остановлена на шаге 430. Программа 400 затем переходит к шагу 432.
Далее, на шаге 432, общий объем воздушного наполнения в вакуумном резервуаре, V_HP, рассчитывают, складывая начальное воздушное наполнение, V_нач., приток воздуха ОВ в вакуумный резервуар, вызванный последовательностью N активаций, и утечку воздуха ОУ в вакуумный резервуар в процессе N активаций - и вычитая отток воздуха ОВЭ из вакуумного резервуара, вызванный вакуумом эжектора. Таким образом,

При этом величина ОВЭ может быть сохранена в памяти контроллера на шаге 428. Если получается, что V_HP меньше нуля, то может быть введено ограничение на уровне нуля, так как нулевой объем воздушного наполнения может указывать на совершенный вакуум.
На шаге 434 может быть определено абсолютное давление в резервуаре ДВР по формуле:

Объем резервуара может представлять собой действительный объем всего вакуумного резервуара, например, вакуумного резервуара 158 ФИГ. 1 и 2. Величина ДВР нов. может заменить ранее оцененное значение ДВР в памяти системы управления. Далее, вакуум в вакуумном резервуаре, РВ, может быть оценен вычитанием ДВР_нов. из БД на шаге 436.

Величина РВ может указывать на степень разрежения в вакуумном резервуаре.
Нетрудно понять, что оценка вакуума резервуара может заканчиваться, когда вакуум в коллекторе увеличивается выше значения Порог_V. Альтернативно, расчет вакуума резервуара может заканчиваться, когда давление в коллекторе снижается ниже прежней оценки давления в резервуаре (например, ДВК<ДВР). Уточним: когда вакуум в коллекторе (БД - ДВК) достаточен для подвода вакуума к вакуумным приводам и их активации, вакуум в коллекторе может быть выше, чем резервуарный вакуум. Таким образом, впускной коллектор может обеспечивать вакуум для вакуумного резервуара и может влиять на расчеты величины ДВР. Соответственно, когда определено, что вакуум в коллекторе (БД - ДВК) выше, чем Порог_V, расчеты ДВР могут быть прерваны и удалены из памяти контроллера. Далее, ранее определенное ДВР может также быть удалено из памяти, и начальное воздушное наполнение может быть определено так, как будет объяснено ниже в описании программы 500 ФИГ. 5.
Таким образом, вакуум в вакуумном резервуаре может быть смоделирован путем оценки количества или объема воздуха, поступающего в вакуумный резервуар и вытекающего из вакуумного резервуара, вследствие одной или нескольких активаций вакуумного привода, утечки и/или вакуума вентилятора. Как будет подробно показано на ФИГ.5, вначале может быть определен начальный, присутствующий в резервуаре объем воздуха, а приток воздуха в вакуумный резервуар, вызванный активацией (активациями) вакуумного привода и соответствующей утечкой воздуха (если таковая имеется), могут быть добавлены. Далее, если в процессе оценки вакуум для вакуумного резервуара обеспечивается вентилятором, может быть вычтен отток воздуха из вакуумного резервуара. Величина (или объем) вызванного вакуумом вентилятора оттока воздуха из вакуумного резервуара может определяться по вакууму, подаваемому к другим устройствам, например, к тормозному аккумулятору или тормозному вакуумному резервуару 138 ФИГ. 2. Воздушное наполнение в вакуумном резервуаре может затем быть переведено в абсолютное давление и затем - в вакуум в резервуаре РВ. В принципе, этот вакуум может быть обозначен как степень разрежения в резервуаре. Далее, как раскрыто на ФИГ. 3, оцененный резервуарный вакуум может быть сопоставлен с желаемым первым порогом (Порог_Р). Если оцененный резервуарный вакуум ниже желаемого первого порога, контроллер может установить флаг на восполнение вакуума в вакуумном резервуаре, когда будет выявлена соответствующая возможность. Если определяется, что резервуарный вакуум выше желаемого первого порога и последующая активация вакуумного привода не вызывает изменения состояния активированного клапана (например, КУДЗ), может быть определена деградация вакуумного привода (и/или клапана с вакуумным приводом).
Таким образом, пример способа может содержать указание деградации вакуумного привода на основе оценки притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара, причем оценку выполняют, исходя из расхода воздуха, создаваемого посредством каждого вентилятора впускной системы, активации вакуумного привода и утечки в процессе активации вакуумного привода. Деградация вакуумного привода может быть указана, когда степень разрежения в вакуумном резервуаре, исходя из оценки расходов воздуха, выше, чем первый порог (например, Порог_Р), и когда состояние вакуумного привода не изменяется при активации. Далее, способ может содержать отсутствие указания на деградацию вакуумного привода, когда степень разрежения в вакуумном резервуаре, исходя из оценки расходов воздуха, ниже, чем первый порог (например, Порог_Р), и когда состояние вакуумного привода не изменяется при активации. Вакуумный резервуар может быть регулирующим резервуаром тракта впускного коллектора, например, это может быть вакуумный резервуар 158 ФИГ. 1 и 2, который подводит вакуум только к приводам клапанов управления движением заряда (КУДЗ). Далее, вакуумный привод может активировать КУДЗ. Вентилятор, встроенный в систему двигателя, может втягивать воздух из вакуумного резервуара, причем активация вакуумного привода может подавать воздух в вакуумный резервуар, и утечки в процессе активации вакуумного привода могут вводить воздух в вакуумный резервуар. Приток воздуха при активации вакуумного привода может определяться по откалиброванной величине, причем эта откалиброванная величина представляет собой первую порцию воздуха, втекающего в вакуумный резервуар за одну активацию вакуумного привода. Количество воздуха утечки в процессе активации вакуумного привода может быть определено на основе скорости утечки, а скорость утечки определяется расчетом второй порции воздуха, втекающего в вакуумный резервуар за данное время в процессе непрерывной активации вакуумного привода. Расход воздуха через вентилятор может зависеть от следующих величин: вакуума в коллекторе (этот вакуум может определять расход воздуха во впускном канале двигателя) и вакуума, потребляемого одним или несколькими вакуумными устройствами помимо вакуумного привода. К вакуумным устройствам могут относиться один или несколько резервуаров питающих усилитель тормоза, например, тормозной аккумулятор, сам усилитель тормоза и фильтр паров горючего. Обратимся теперь к ФИГ. 5, на ней представлена программа 500, иллюстрирующая оценку приведенного к нормальным условиям начального объема воздуха в вакуумном резервуаре. Объем начального воздушного наполнения оценивают до расчета изменений воздушного наполнения в вакуумном резервуаре. Как объяснено выше, объем приводится к нормальным условиям для компенсации высоты нахождения транспортного средства.
На шаге 502 программа 500 определяет, верно ли, что давление во впускном коллекторе ДВК ниже, чем ранее оцененное ДВР. Альтернативно, начальный объем воздуха в вакуумном резервуаре может быть определен, когда вакуум в коллекторе (например, БД - ДВК) выше, чем второй порог, Порог_V, введенный в программе 400. Объем начального воздушного наполнения вакуумного резервуара может быть определен, когда вакуум в коллекторе достаточен для подвода вакуума к вакуумному резервуару. Когда БД - ДВК выше, чем Порог_V и/или когда ДВК ниже, чем ранее оцененное ДВР, воздух будет течь из вакуумного резервуара во впускной коллектор, и степень разрежения в вакуумном резервуаре может увеличиться. Как было отмечено выше, Порог_V может в одном из примеров составлять 7 дюймов рт.ст. В другом примере Порог_V может составлять 5 дюймов рт.ст. В принципе, когда ДВК ниже ДВР и/или когда вакуум в коллекторе выше, чем Порог_V, контроллер может повторно инициализировать расчет начального воздушного наполнения в вакуумном резервуаре, для определения текущего уровня воздушного наполнения.
Если определено, что ДВК ниже ДВР и/или вакуум в коллекторе выше, чем Порог_V, программа 500 переходит к шагу 504, чтобы оценить начальный приведенный к н.у. объем воздуха в вакуумном резервуаре (V_нач.) по формуле: объем резервуара * (ДВК/БД). На шаге 506 этот оцененный начальный объем воздуха может быть сохранен в памяти контроллера - для извлечения, когда будет запущен расчет резервуарного вакуума (например, программой 400).
Если на шаге 502 определяют, что ДВК не ниже, чем ранее оцененное ДВР и/или вакуум в коллекторе ниже, чем Порог_V, программа 500 переходит к шагу 508. В одном из примеров ДВК может быть выше, чем ранее оцененное ДВР, при высоком ускорении, когда впускной дроссель широко открыт. В другом примере ДВК может быть выше, чем ранее оцененное ДВР (или вакуум в коллекторе может быть ниже, чем Порог_V), когда двигатель выключен и остается выключенным. При этом ДВК может быть равным атмосферному (или барометрическому) давлению. Соответственно, на шаге 508 программа 500 определяет, выключен ли двигатель и превышает ли длительность простоя двигателя Порог_D. Если двигатель выключен и остается выключенным (это состояние также обозначается как простой двигателя) дольше, чем Порог_D, резервуарный вакуум может быть утрачен. Например, резервуарный вакуум может быть утрачен из-за утечки. С другой стороны, при более кратком простое двигателя разрежение в вакуумном резервуаре может частично сохраниться. В одном из примеров Порог_D может составлять 3 дня. В другом примере Порог_D может быть меньше, например 2 дня. Альтернативно, Порог_D может быть больше, чем 3 дня.
Если на шаге 508 программа 500 определяет, что двигатель выключен и время простоя двигателя меньше, чем Порог_D, программа 500 переходит к шагу 509, на котором новый начальный объем воздуха может не рассчитываться, и на шаге 510 ранее оцененный начальный объем воздуха может быть сохранен в памяти контроллера. Программа 500 может затем завершиться. С другой стороны, если определено, что двигатель выключен, но время простоя двигателя больше, чем Порог_D, программа 500 переходит к шагу 512. На шаге 512 резервуарный вакуум оценивается как утраченный, и V_нач. может быть определен как равный объему резервуара. Уточним: если время простоя двигателя больше, чем Порог_D, величина ДВК может равняться БД. Таким образом, расчет V_нач. по формуле, использованной на шаге 504 (V_нач. = объем резервуара * (ДВК/БД)), дает значение V_нач., равное объему резервуара. После этого программа 500 завершается.
Таким образом, в одном из вариантов способ оценки воздушного наполнения вакуумного резервуара может содержать определение начального объема воздуха в вакуумном резервуаре, добавление первого объема воздуха на основе количества последовательных активаций вакуумно активируемого привода, добавление второго объема воздуха, исходя из утечки в процессе ряда последовательных активаций, вычитание третьего объема воздуха, исходя из забора воздуха из вакуумного резервуара вентилятором, и указание деградации вакуумно активируемого привода, когда оцененное воздушное наполнение ниже порога и состояние вакуумно активируемого привода не изменяется при активации. Начальный объем воздуха в вакуумном резервуаре может быть определен, если абсолютное давление воздуха в коллекторе ниже, чем ранее оцененное абсолютное давление в вакуумном резервуаре. В другом примере начальный объем воздуха в вакуумном резервуаре может быть определен, если вакуум в коллекторе выше, чем второй порог, например, Порог_V. Далее, упомянутые добавление и вычитание могут выполняться, только когда вакуум в коллекторе меньше (ниже), чем второй порог Порог_V. Другими словами, начальный объем воздуха в вакуумном резервуаре может быть определен, только когда впускной коллектор может подводить вакуум к вакуумному приводу(приводам) и вакуумному резервуару, а резервуарный вакуум может быть оценен, только когда впускной коллектор не может подводить вакуум к вакуумным приводам и вакуумному резервуару. Далее, резервуарный вакуум может быть оценен, когда вакуумный резервуар может подводить вакуум к вакуумному приводу(приводам). Кроме того, оценка воздушного наполнения в вакуумном резервуаре может быть скомпенсирована в отношении изменений высоты нахождения транспортного средства путем использования приведенного к н.у. начального объема воздуха в вакуумном резервуаре.
На ФИГ. 6 представлен набор графиков 600, иллюстрирующий пример диагностики клапана с вакуумным приводом (например, КУДЗ) или вакуумного привода, например, приводов 75 и 77 клапанов КУДЗ ФИГ. 1, исходя из степени разрежения в вакуумном резервуаре, соединенном с двигателем. Набор графиков 600 содержит диагностику деградации вакуумного привода (или клапана с вакуумным приводом) на графике 602, изменения показаний датчика положения на графике 604, активации вакуумного привода на графике 606, резервуарный вакуум на графике 608 (пунктирная линия), вакуум в коллекторе на графике 610, нагрузку двигателя на графике 612 и частоту вращения двигателя на графике 614. Все вышеперечисленные величины в наборе графиков 600 даны в зависимости от времени, время отложено по оси x и увеличивается слева направо. Линия 607 представляет первый порог вакуума, например, Порог_Р, а линия 609 представляет второй порог вакуума, например, Порог_V. Следует заметить, что в этом примере диагностики показаны изменения вакуума в коллекторе и резервуарного вакуума, а не давления в коллекторе и резервуарного давления. В принципе, когда вакуум в коллекторе ниже резервуарного вакуума, абсолютное давление воздуха в коллекторе ДВК выше, чем абсолютное давление в резервуаре ДВР. Аналогично, когда вакуум в коллекторе выше, чем резервуарный вакуум, ДВК ниже ДВР. Таким образом, более высокий степень разрежения указывает на существенно пониженные давления, например на пониженное абсолютное давление. Следует также заметить, что хотя первый порог (Порог_Р) и второй порог (Порог_V) изображены на графике как разделенные пороги, в некоторых примерах эти пороги могут совпадать. К примеру, каждый из порогов, Порог_Р и Порог_V, может составлять 7 дюймов рт.ст. В другом примере оба порога, первый и второй, могут быть по 8 дюймов (203 мм) рт.ст.
До момента t1 двигатель может работать на холостых оборотах, как показано на графике 614, и, следовательно, нагрузка двигателя может быть пониженной. На холостых оборотах вакуум в коллекторе (график 610) может быть выше, так как при работающем двигателе впускной дроссель может быть закрыт. Далее, вакуум в коллекторе значительно выше, чем второй порог, Порог_V, представленный линией 609. Резервуарный вакуум (график 608) может расти до момента t1, так как воздух высасывается из вакуумного резервуара во впускной коллектор. В момент t1 резервуарный вакуум может быть существенно таким же, как вакуум в коллекторе. Далее, на холостых оборотах КУДЗ может быть не отрегулирован и может поддерживаться в открытом состоянии, таким образом, вакуумный привод, регулирующий КУДЗ, может быть в положении "ВЫКЛ" до момента t1. Далее, в отсутствии активации датчик положения может не указывать изменения (график 604).
В момент t1, при начале движения транспортного средства, частота вращения двигателя вначале может увеличиться, а затем может снизиться и стабилизироваться. Например, водитель транспортного средства может нажать педаль акселератора, и частота вращения двигателя вначале может увеличиться в ответ на изменение положения педали акселератора. Одновременно может слегка увеличиться нагрузка двигателя в промежутке между t1 и t2. В ответ на изменение положения педали акселератора впускной дроссель может быть открыт, и вакуум в коллекторе может уменьшиться в промежутке между t1 и t2. Для улучшения сжигания и скорости горения топлива, клапаны КУДЗ могут быть активированы на почти или полностью закрытое положение (график 606). На эту активацию и результирующее изменение положения клапанов КУДЗ указывает датчик положения в момент t1. Далее, так как в момент t1 вакуум в вакуумном резервуаре выше, чем вакуум в коллекторе, активация вакуумного привода вытягивает вакуум из вакуумного резервуара, а не из впускного коллектора. Соответственно, вакуум в вакуумном резервуаре уменьшается в промежутке между t1 и t2 вследствие непрерывной активации вакуумного привода.
В момент t2, в ответ на нажатие педали, частота вращения двигателя значительно увеличивается вместе с соответствующим увеличением нагрузки двигателя. В принципе, впускной дроссель может быть широко открыт, вакуум в коллекторе значительно уменьшается и оказывается существенно ниже линии 609 (Порог_V), вследствие увеличения давления в коллекторе. В момент t2 вакуумный привод может быть дезактивирован и клапаны КУДЗ могут переводиться в открытое положение, открывая желательный повышенный приток воздуха во впускной канал в ответ на нажатие педали. Соответственно, датчики положения показывают изменение положения в момент t2. За нажатием педали может следовать уменьшение частоты вращения двигателя и нагрузки двигателя, так как скорость транспортного средства стабилизируется. Далее, в промежутке между t2 и t3 вакуумный привод может активироваться на короткое время для перевода клапанов КУДЗ в слегка закрытое или почти закрытое положение. Соответственно, резервуарный вакуум может уменьшиться в промежутке между t2 и t3. В принципе, уменьшение резервуарного вакуума может также быть вызвано утечкой в процессе непрерывной активации. Далее, так как в момент t3 КУДЗ дезактивируется и на привод поступает команда ВЫКЛ, резервуарный вакуум уменьшается, опускаясь ниже первого порога, Порог_Р, показанного линией 607. Далее, контроллер может установить флаг, указывающий на низкий вакуум в резервуаре.
В момент t4 вакуумный привод может быть активирован, чтобы перевести клапаны КУДЗ в более закрытое положение. Но так как резервуар, имея вакуум ниже Порог_P, не может подвести необходимый вакуум для срабатывания вакуумного привода, клапаны КУДЗ могут не изменить положение (график 604) в момент t4. Далее, контроллер может не указывать деградацию привода, исходя из отсутствия срабатывания клапанов КУДЗ, так как определено, что резервуарный вакуум ниже, чем первый порог, Порог_Р (линия 607). Альтернативно, когда в момент t3 контроллер устанавливает флаг, указывающий на низкий вакуум в вакуумном резервуаре, так как резервуарный вакуум ниже первого порога, Порог_P (линия 607), контроллер может, кроме того, предотвратить выдачу команды на вакуумный привод в момент t4.
В промежутке между t4 и t5 транспортное средство может замедляться и, соответственно, частота вращения двигателя может уменьшаться, вместе с нагрузкой двигателя. Далее, в момент t5 могут снова возникнуть условия холостого хода, так что обороты двигателя становятся оборотами холостого хода, а нагрузка двигателя становится номинальной. Например, транспортное средство может работать на холостом ходу, пережидая красный свет. В ответ на условия холостого хода впускной дроссель может быть закрыт, что увеличит вакуум в коллекторе. В промежутке между t5 и t6 вакуум в коллекторе увеличивается, поднимаясь значительно выше уровня Порог_V, и впускной коллектор подводит вакуум к вакуумному резервуару, поднимая резервуарный вакуум выше первого порога, Порог_P (линия 607). В момент t6 резервуарный вакуум может быть существенно таким же, как вакуум в коллекторе. В момент t6 частота вращения двигателя и нагрузка двигателя могут снова возрасти. В ответ на увеличение частоты вращения двигателя вакуум в коллекторе может значительно снизиться. Далее, в момент t6 вакуумный привод может получить команду закрыть (или активировать) клапаны КУДЗ. В ответ на эту команду вакуум из вакуумного резервуара может быть подан к вакуумным приводам, что вызывает уменьшение резервуарного вакуума. Датчики положения в момент t6 показывают изменение состояния клапанов КУДЗ.
В момент t7 может иметь место новое нажатие педали, вследствие чего впускной дроссель может быть широко открыт, что ведет к значительному снижению вакуума в коллекторе. При этом вакуум в коллекторе может упасть до уровня ниже, чем Порог_V (линия 609). Одновременно, приводы КУДЗ могут быть активированы для перевода клапанов КУДЗ в открытое положение. В момент t8 частота вращения и нагрузка двигателя уменьшаются, так как нажатие педали может закончиться, и транспортное средство может двигаться с постоянной скоростью. Для улучшения скорости горения, приводы КУДЗ могут получить команду закрыть клапаны КУДЗ. Однако датчики положения не показывают изменения положения в ответ на эту команду в момент t8. Оценка вакуума резервуара указывает, что вакуумный резервуар содержит достаточный вакуум (выше, чем Порог_Р, линия 607). Таким образом, контроллер указывает на деградацию привода (или заедание КУДЗ) в ответ на отсутствие срабатывания клапана с вакуумным приводом, когда степень разрежения в вакуумном резервуаре выше, чем первый порог, Порог_Р (график 602).
Как нетрудно понять, вышеприведенные примеры содержат диагностику деградации вакуумных приводов, например приводов КУДЗ, и/или клапанов с вакуумным приводом, например клапанов КУДЗ. Способы и программы, раскрытые в настоящем документе, могут также использоваться для других вакуумных приводов и/или клапанов с вакуумным приводом.
Таким образом, пример способа может содержать оценку общей степени разрежения в вакуумном резервуаре в двигателе, активацию клапана с вакуумным приводом и, если клапан с вакуумным приводом не срабатывает в ответ на активацию, указание на деградацию клапана с вакуумным приводом, когда степень разрежения выше, чем некоторый порог, - и отсутствие указания на деградацию клапана с вакуумным приводом, когда степень разрежения, согласно оценке, ниже, чем этот порог. Способ может также содержать шаг, на котором устанавливают первый диагностический код в ответ на указание деградации клапана с вакуумным приводом. Способ может также содержать шаг, на котором, в ответ на определение того, что степень разрежения ниже порога, дезактивируют клапан с вакуумным приводом до тех пор, пока степень разрежения не увеличится до порога. Клапан с вакуумным приводом в одном из примеров может быть расположен ниже по потоку от впускного дросселя во впускном канале двигателя. Далее, степень разрежения может быть оценена, исходя из притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара в ответ на одну или несколько активаций клапана с вакуумным приводом, исходя из утечки в процессе активации и исходя из расхода всасывания вентилятора. Количество воздуха, поступающего в вакуумный резервуар, может быть определено на основе количества последовательных активаций привода и на основе утечки при каждой активации привода, а отток воздуха из вакуумного резервуара может включать воздух, всосанный из вакуумного резервуара вентилятором.
Таким образом, деградация вакуумного привода может быть определена более надежно. Степень разрежения в вакуумном резервуаре, подводящем вакуум к вакуумному приводу, может отслеживаться просто путем оценки притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара при определенных условиях. Посредством оценки вакуума в вакуумном резервуаре количество ошибочных указаний на деградацию вакуумного привода или клапана с вакуумным приводом может быть снижено. В принципе, отсутствие срабатывания клапана с вакуумным приводом или вакуумного привода может быть связано с недостаточным уровнем разрежения в вакуумном резервуаре. Снижение вероятности ошибочных указаний на деградацию позволяет также избежать ненужной и дорогой диагностики вакуумных приводов. В общем, издержки техобслуживания могут быть снижены, и удовлетворенность потребителя может быть повышена.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут быть осуществлены системой управления, включающей контроллер в сочетании с различными датчиками, исполнительными механизмами и другими элементами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, причем раскрытые действия осуществляются путем исполнения команд в системе, включающей различные элементы двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
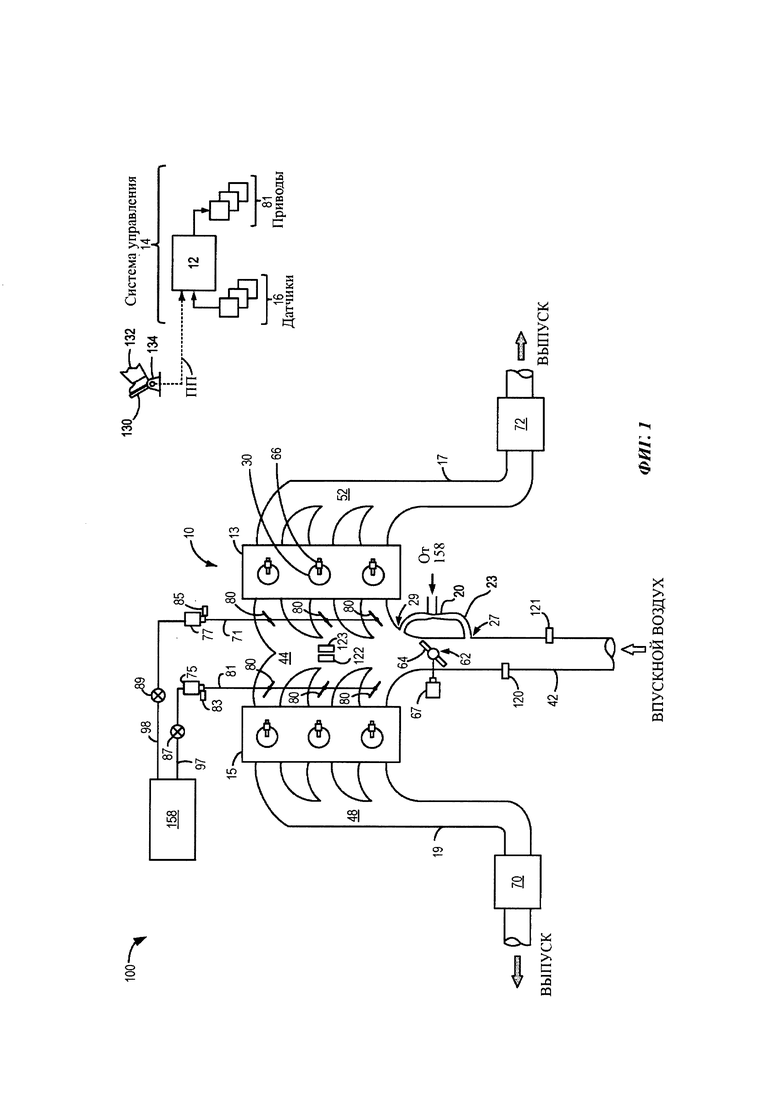
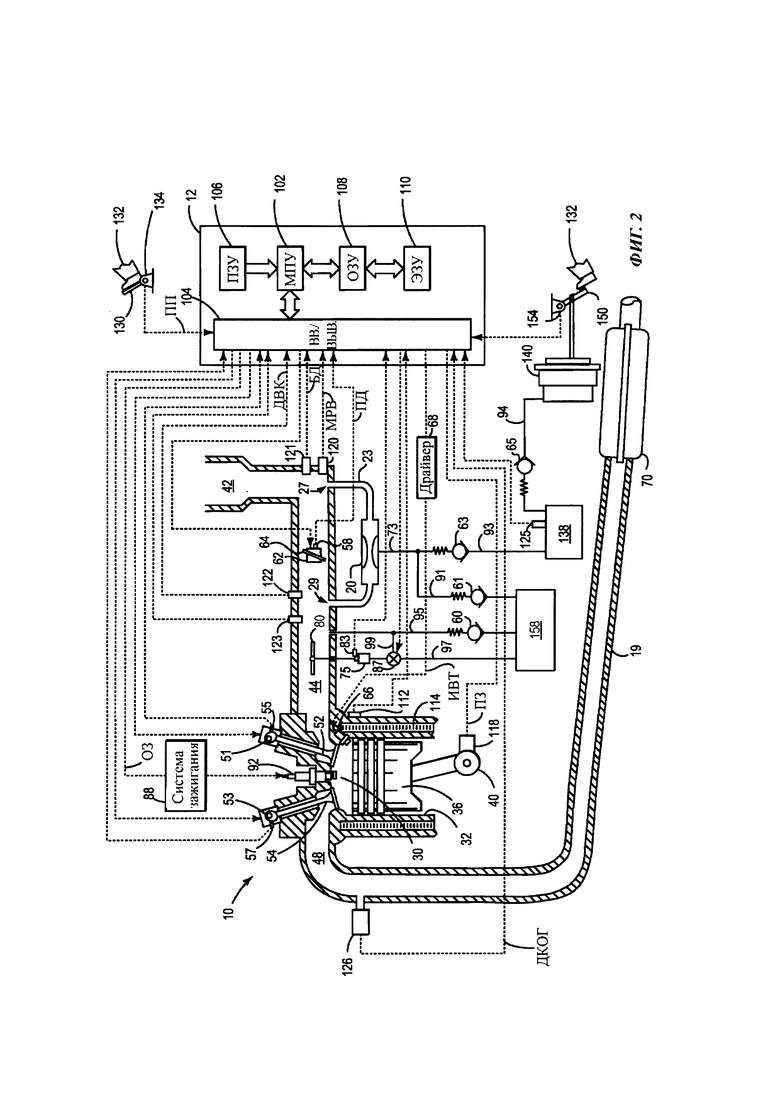
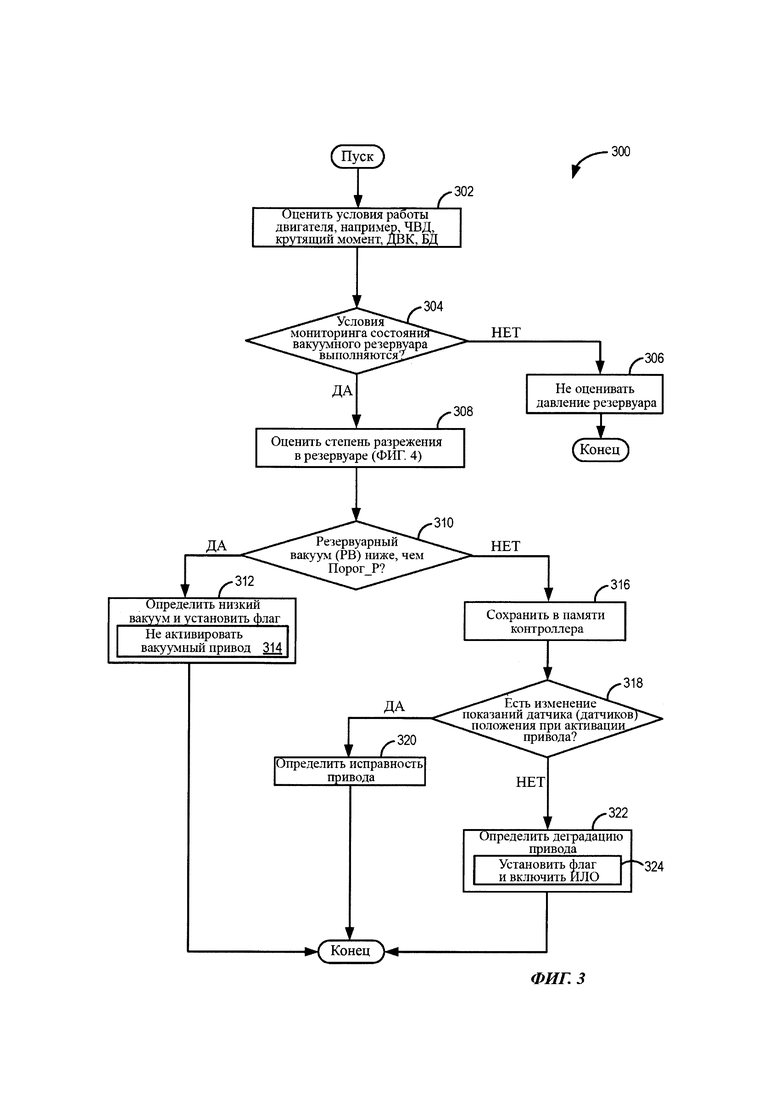
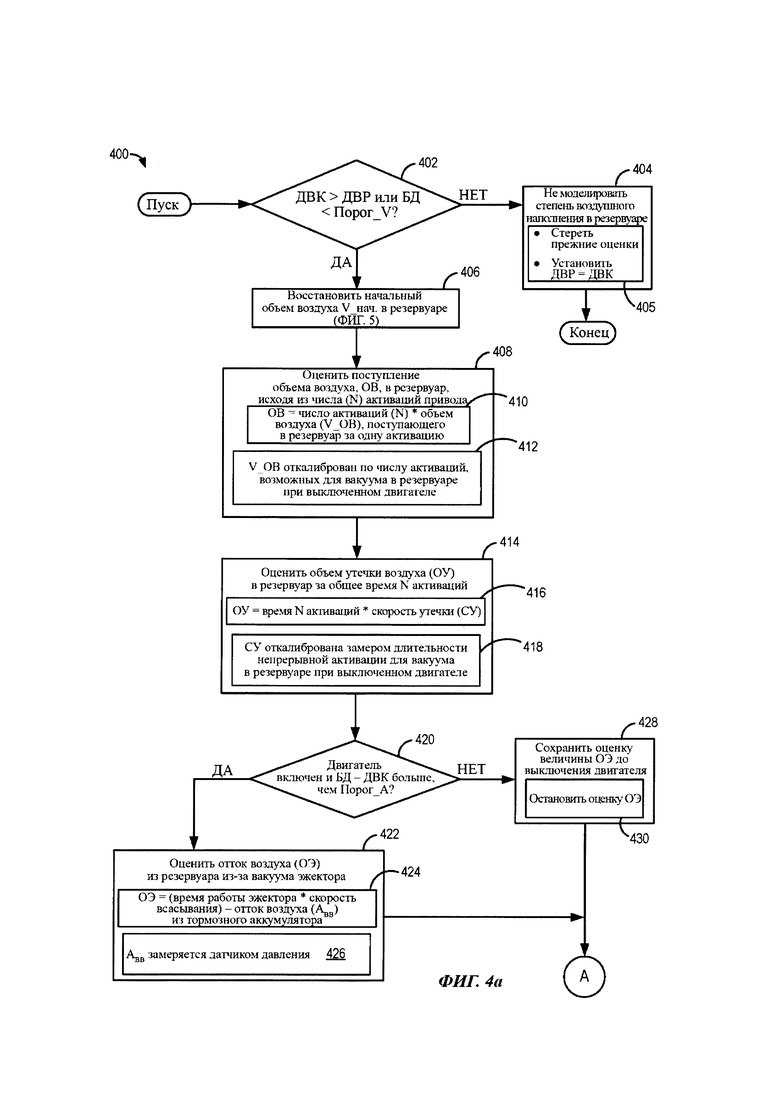
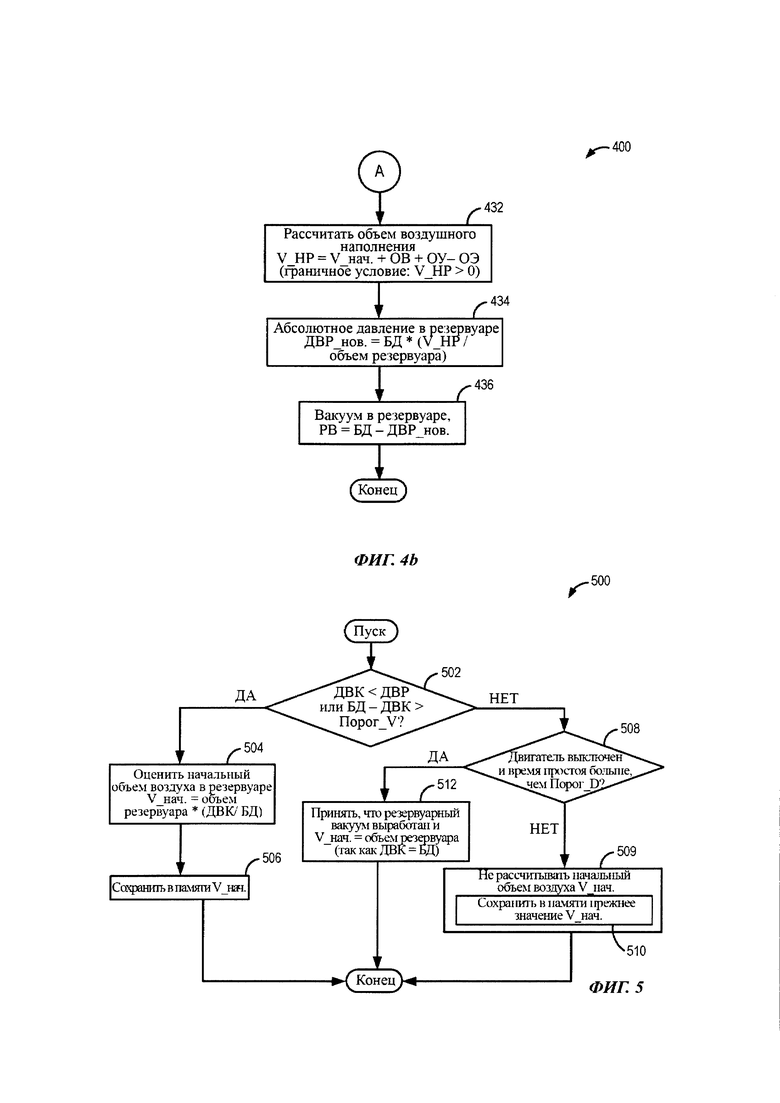
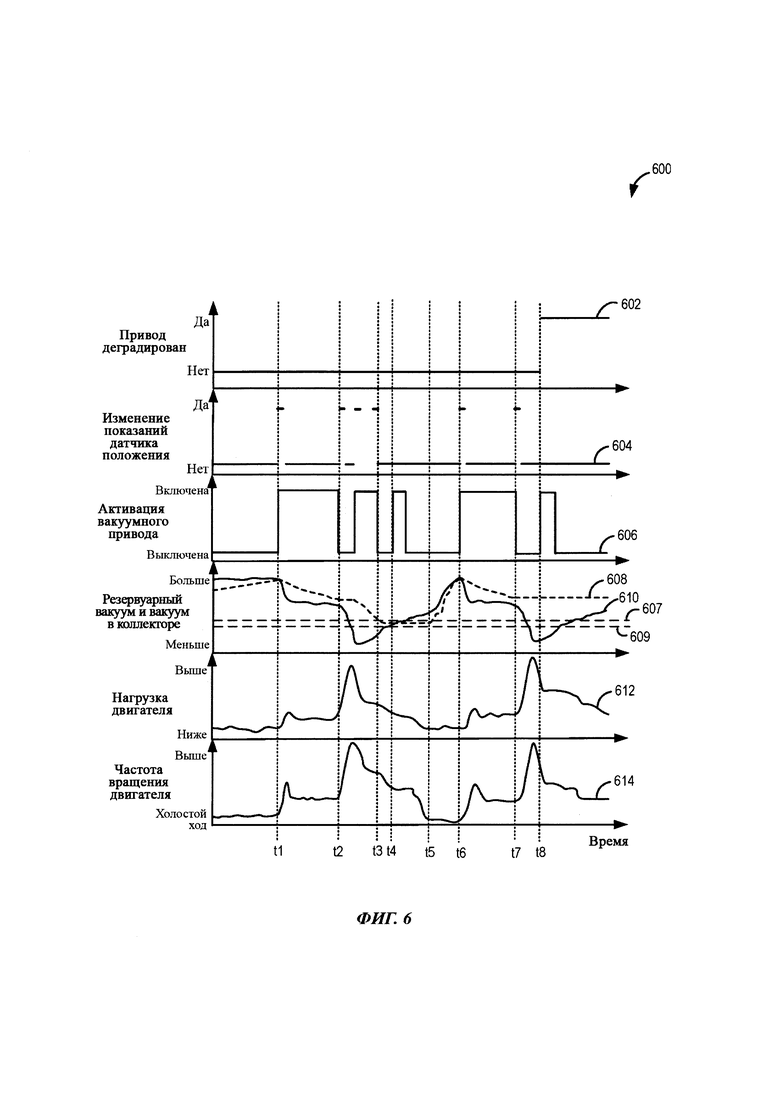
Изобретение относится к двигателестроению, а именно к оценке вакуумного привода. Способ диагностики вакуумного привода (75, 77) содержит следующие шаги: указывают деградацию вакуумного привода (75, 77), исходя из оценки расхода воздуха в вакуумный резервуар (158) и из вакуумного резервуара (158). Оценку выполняют исходя из расхода воздуха, создаваемого посредством каждого вентилятора (20) впускной системы, из активации вакуумного привода (75, 77) и из утечки в процессе активации вакуумного привода (75, 77). Также раскрыты вариант способа диагностики вакуумного привода и система диагностики вакуумного привода. Технический результат заключается в снижении количества ошибок диагностики деградации вакуумного привода. 3 н. и 16 з.п. ф-лы, 7 ил.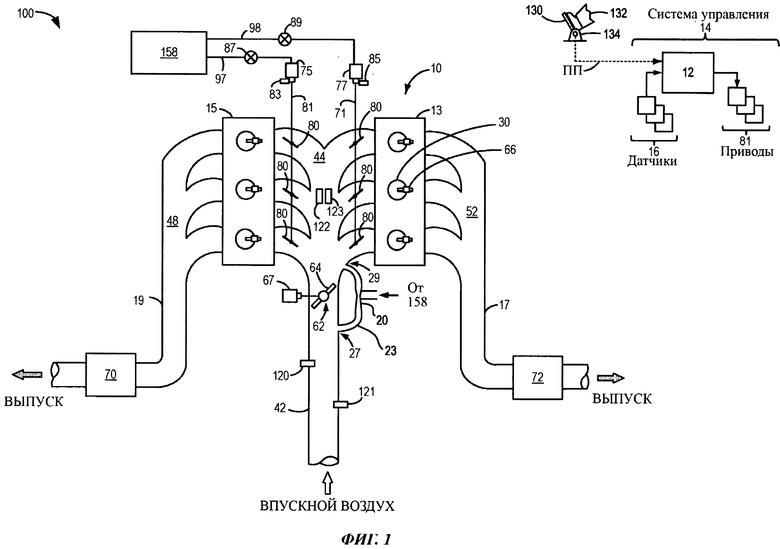
1. Способ диагностики вакуумного привода, содержащий следующие шаги: указывают деградацию вакуумного привода, исходя из оценки расхода воздуха в вакуумный резервуар и из вакуумного резервуара, причем оценку выполняют, исходя из расхода воздуха, создаваемого посредством каждого вентилятора впускной системы, из активации вакуумного привода и из утечки в процессе активации вакуумного привода.
2. Способ по п. 1, отличающийся тем, что деградацию вакуумного привода указывают, когда степень разрежения в вакуумном резервуаре, исходя из оценки расхода воздуха, выше, чем первый порог, и когда состояние вакуумного привода не изменяют при активации.
3. Способ по п. 2, отличающийся тем, что также содержит следующий шаг: не указывают деградацию вакуумного привода, когда степень разрежения в вакуумном резервуаре, исходя из оценки расхода воздуха, ниже, чем первый порог, и когда состояние вакуумного привода не изменяют при активации.
4. Способ по п. 1, отличающийся тем, что вакуумный резервуар представляет собой регулирующий резервуар тракта впускного коллектора, причем вакуумный привод активирует клапан управления движением заряда.
5. Способ по п. 1, отличающийся тем, что вентилятор вытягивает воздух из вакуумного резервуара, при этом активация вакуумного привода подает воздух в вакуумный резервуар, и утечка в процессе активации вакуумного привода подает воздух в вакуумный резервуар.
6. Способ по п. 5, отличающийся тем, что расход воздуха, протекающего при активации вакуумного привода, определяют на основе откалиброванной величины, причем эта откалиброванная величина составляет первую порцию воздуха, втекающего в вакуумный резервуар за одну активацию вакуумного привода.
7. Способ по п. 6, отличающийся тем, что расход воздуха утечки в процессе активации вакуумного привода определяют по скорости утечки, а скорость утечки определяют расчетом второй порции воздуха, втекающего в вакуумный резервуар за данное время в процессе непрерывной активации вакуумного привода.
8. Способ по п. 7, отличающийся тем, что расход воздуха, создаваемого посредством вентилятора, зависит от следующих величин: вакуума в коллекторе и вакуума, потребляемого одним или несколькими вакуумными устройствами, помимо вакуумного привода.
9. Способ по п. 8, отличающийся тем, что вакуумные устройства содержат одно или несколько следующих: усилитель тормоза и фильтр паров горючего.
10. Способ диагностики вакуумного привода, содержащий следующие шаги:
оценивают степень разрежения в вакуумном резервуаре в двигателе;
активируют клапан с вакуумным приводом; при этом
если клапан с вакуумным приводом не срабатывает в ответ на активацию,
указывают деградацию клапана с вакуумным приводом, когда степень разрежения выше, чем некоторый порог; и
не указывают деградацию клапана с вакуумным приводом, когда степень разрежения, согласно оценке, ниже, чем этот порог.
11. Способ по п. 10, отличающийся тем, что также содержит шаг, на котором, в ответ на указание деградации клапана с вакуумным приводом, устанавливают первый диагностический код.
12. Способ по п. 11, отличающийся тем, что также содержит следующий шаг: в ответ на определение того, что степень разрежения ниже порога, дезактивируют клапан с вакуумным приводом до тех пор, пока степень разрежения не возрастет до порога.
13. Способ по п. 12, отличающийся тем, что клапан с вакуумным приводом расположен ниже по потоку от впускного дросселя во впускном канале двигателя.
14. Способ по п. 12, отличающийся тем, что степень разрежения оценивают, исходя из расхода воздуха в вакуумный резервуар и из вакуумного резервуара в ответ на одно или несколько из следующего: активации клапана с вакуумным приводом, утечки в процессе активации и расхода всасывания вентилятора.
15. Система диагностики вакуумного привода, содержащая:
двигатель с цилиндром, причем цилиндр связан по текучей среде с впускным каналом через впускной коллектор;
клапан управления движением заряда, расположенный во впускном канале ниже по потоку от впускного дросселя;
привод, выполненный с возможностью перевода клапана управления движением заряда между открытым положением и закрытым положением;
вакуумный резервуар, связанный по текучей среде с каждым из следующих элементов: приводом, вентилятором и впускным коллектором; и
контроллер с сохраненными в долговременной памяти машиночитаемыми командами для:
активации клапана управления движением заряда с помощью привода; и
указания на деградацию привода, если клапан управления движением заряда не срабатывает в ответ на активацию, когда степень воздушного наполнения в вакуумном резервуаре ниже порога.
16. Система по п. 15, отличающаяся тем, что контроллер содержит также команды для отключения привода и клапана управления движением заряда в ответ на указание деградации.
17. Система по п. 15, отличающаяся тем, что выполнена с возможностью оценки степени воздушного наполнения в вакуумном резервуаре на основе притока воздуха в вакуумный резервуар и оттока воздуха из вакуумного резервуара.
18. Система по п. 17, отличающаяся тем, что приток воздуха в вакуумный резервуар основан на количестве последовательных активаций привода и утечке при каждой активации привода, причем отток воздуха из вакуумного резервуара содержит воздух, всосанный из вакуумного резервуара вентилятором.
19. Система по п. 15, отличающаяся тем, что контроллер содержит также команды для указания низкого разряжения в вакуумном резервуаре, когда степень воздушного наполнения в вакуумном резервуаре, согласно оценке, выше, чем порог.
| US 2012318047 A1, 20.12.2012 | |||
| US 2002129646 A1, 19.09.2002 | |||
| Способ получения ковкого чугуна | 1960 |
|
SU142670A1 |

