Изобретение относится к способам экологического контроля водной среды путем непрерывного измерения физических и химических параметров среды, а также оперативного определения состава и количественного содержания загрязняющих веществ в озерных и морских акваториях, и может быть использовано для обнаружения и классификации подвижного носителя экологического загрязнения и определения линии и направления его движения.
Для снижения ущерба от экологических загрязнений, произведенных подвижным источником (судном), необходимо произвести задержание судна-нарушителя. Для этого необходимо определить траекторию, направление и параметры движения судна-загрязнителя.
Известна система контроля качества воды [1], которая содержит измерительное оборудование, установленное в море на глубине 1 и 5 м и с помощью датчиков измеряющее температуру, электропроводимость и содержание растворенного в воде кислорода. Данные измерений транслируются на береговой пост для последующей обработки. Система обеспечивает локальный характер измерений, не позволяющий контролировать обширные водные пространства естественных водоемов, и ограниченный диапазон контролируемых параметров водной среды.
Известна система измерительная химико-физических параметров водной среды автоматическая [2], характеризующаяся тем, что она содержит, по меньшей мере, один преобразователь гидрохимико-физических параметров водной среды, включающий контактный преобразователь удельной электрической проводимости водной среды, преобразователь температуры, преобразователь водородного показателя, преобразователь значения окислительно-восстановительного потенциала, электрод сравнения, преобразователь массовой концентрации растворенного кислорода, преобразователь глубины, автономный двухполярный источник напряжения питания, запитывающие повторители напряжения, входящие в состав преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала и электрода сравнения, и аналого-цифровой преобразователь с контроллером интерфейса RS-485 на выходе, а также связанную с преобразователем гидрохимико-физических параметров водной среды электронно-вычислительную машину (ЭВМ) с клавиатурой, подключенной к входу-выходу ЭВМ для подключения клавиатуры, и монитором, подключенным к выходу ЭВМ для подключения монитора, при этом первичные измерительные преобразователи контактного преобразователя удельной электрической проводимости водной среды, преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины, а также электрод сравнения, общий для преобразователя водородного показателя и преобразователя значения окислительно-восстановительного потенциала, установлены в передней части герметичного цилиндрического корпуса преобразователя гидрохимико-физических параметров водной среды, выполненного из материала, стойкого к воздействию агрессивной среды, первичный измерительный преобразователь (ПИП) контактного преобразователя удельной электрической проводимости водной среды имеет форму обтекаемого тела вращения, расположен соосно корпусу преобразователя гидрохимико-физических параметров водной среды и содержит пару токовых электродов, один из которых имеет круглую форму и расположен в носовой части ПИП контактного преобразователя удельной электрической проводимости, а другой образован корпусом ПИП контактного преобразователя удельной электрической проводимости, и пару кольцевых потенциальных электродов, расположенных между токовыми электродами соосно этим электродам и изолированных один от другого и от токовых электродов, ПИП преобразователя температуры выполнен из тонкой изолированной медной проволоки, расположенной между двумя полыми тонкостенными цилиндрами, один из которых образован выступом в корпусе ПИП преобразователя температуры, а другой герметично скреплен, преимущественно сварен лазерной сваркой, с первым полым тонкостенным цилиндром и корпусом ПИП преобразователя температуры, в котором выполнены наклонные отверстия для протекания жидкости внутри первого полого тонкостенного цилиндра, ПИП преобразователя водородного показателя выполнен в виде электрода для определения водородного показателя, к которому подключен повторитель напряжения электрода для определения водородного показателя, ПИП преобразователя значения окислительно-восстановительного потенциала выполнен в виде платинового электрода для определения значения окислительно-восстановительного потенциала, к которому подключен повторитель напряжения платинового электрода для определения значения окислительно-восстановительного потенциала, ПИП преобразователя массовой концентрации растворенного кислорода выполнен в виде двухэлектродной ячейки для определения массовой концентрации растворенного кислорода, к выходу которой подключен преобразователь ток-напряжение, ПИП преобразователя глубины выполнен в виде тензометрического мостового преобразователя давления, первичные измерительные преобразователи преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины, а также электрод сравнения расположены в передней части герметичного цилиндрического корпуса преобразователя гидрохимико-физических параметров водной среды вокруг ПИП контактного преобразователя удельной электрической проводимости водной среды, выходы контактного преобразователя удельной электрической проводимости водной среды, преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, электрода сравнения, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины подключены к входам аналого-цифрового преобразователя, вход-выход контроллера интерфейса RS-485 соединен последовательным каналом связи с соответствующим входом-выходом ЭВМ, которая выполнена с возможностью обработки данных, получаемых от преобразователя гидрохимико-физических параметров водной среды, визуализации обработанных результатов измерения, архивирования и документирования измерительной информации.
Система [2] не обеспечивает решение задачи обнаружения подвижного источника экологического загрязнения акватории.
Известно также использование подвижных носителей (судов) для определения загрязнения водной среды. Так, оборудование, установленное на борту ледокола SHIRASE [3], содержит погружаемую на глубину до 8 м аппаратуру, насос для отбора проб воды, датчики измерения температуры, солености, количества растворенных в воде органических веществ, содержания в ней хлорофилла, биогенов, а также количественного содержания взвешенных частиц размером 0,5-5 мм. Обработка показаний датчиков осуществляется электронно-вычислительной системой.
Система имеет ограниченные возможности определения загрязнения водной среды ввиду отсутствия средств контроля поверхности воды на наличие нефтяных пятен и средств контроля глубинных слоев воды и придонного пространства, что не обеспечивает полноты и достоверности контроля экологического состояния акватории.
Аналогов, обеспечивающих решение задачи обнаружения подвижного источника экологического загрязнения акватории, не выявлено.
Задачей изобретения является обеспечение возможности классификации подвижного источника экологического загрязнения и определения линии и направления его движения.
Сущность изобретения заключается в том, что предлагаемый способ обнаружения подвижного источника экологического загрязнения водной среды характеризуется тем, что одновременно измеряют усредненные значения удельной электрической проводимости (УЭП) и пульсационные значения УЭП водной среды с подвижного носителя, сравнивают измеренные усредненные значения УЭП водной среды с фоновыми усредненными значениями УЭП водной среды, сравнивают интенсивность измеренных пульсационных значений УЭП водной среды с заданным порогом, при одновременном превышении усредненным значением УЭП водной среды фонового усредненного значения УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды заданного порога осуществляют забор воды и производят ее гидрохимический анализ, при обнаружении превышения заданной (например, среднефоновой или предельно допустимой) концентрации, по меньшей мере, одного из загрязняющих веществ продолжают движение подвижного носителя до выхода из зоны, в которой выполняется условие одновременного превышения усредненным значением УЭП водной среды фонового усредненного значения УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды заданного порога, после чего осуществляют разворот подвижного носителя и его движение в обратном направлении, в случае повторного одновременного превышения усредненным значением УЭП водной среды фонового усредненного значения УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды заданного порога и повторном обнаружении превышения заданной концентрации загрязняющего вещества принимают решение о наличии подвижного источника экологического загрязнения.
Линию движения подвижного источника экологического загрязнения определяют по положению прямой линии между точками, в которых обнаружена максимальная интенсивность пульсаций УЭП после первого и второго одновременного превышения усредненным значением УЭП водной среды фонового усредненного значения УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды заданного порога.
Сущность изобретения поясняется чертежами, на которых приведены:
на фиг.1 - функциональная схема устройства для обнаружения подвижного источника экологического загрязнения акватории;
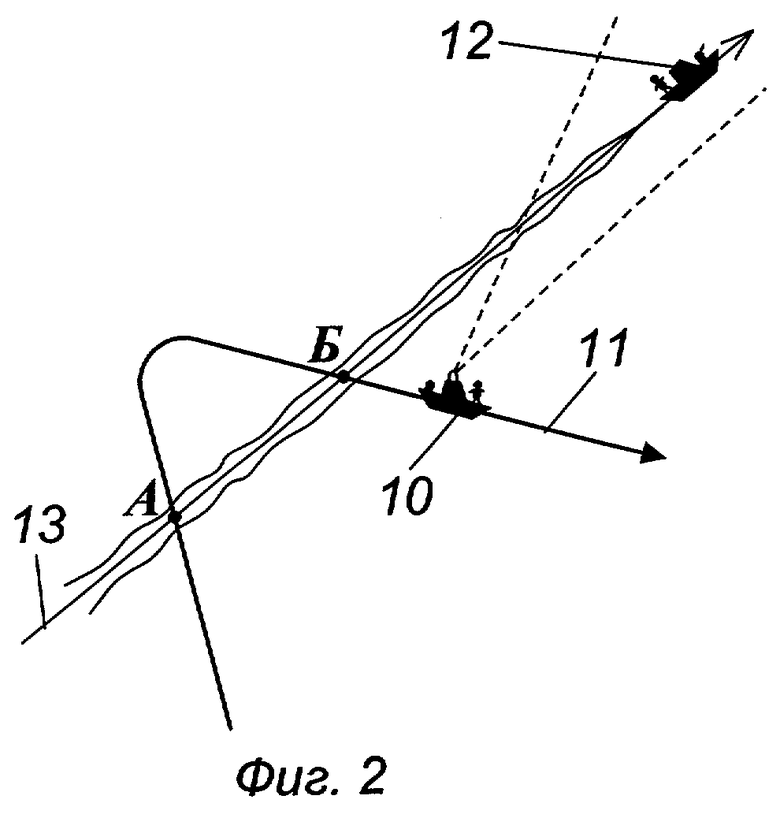
на фиг.2 - пример построения траектории движения подвижного носителя и линии движения источника экологического загрязнения.
На фиг.1 и 2 обозначены:
1 - преобразователь усредненных значений удельной электрической проводимости воды (УЭПС);
2 - преобразователь пульсационных значений УЭП водной среды (УЭПП);
3 - многоканальный аналого-цифровой преобразователь (АЦП);
4 - устройство гидрохимического анализа (ГХА);
5 - спутниковая навигационная система (СНС);
6 - цифровая электронно-вычислительная машина (ЦЭВМ);
7 - устройство документирования (УД);
8 - радиолокационная станция (РЛС);
9 - информационная система судоводителя (ИСС);
10 - подвижный носитель;
11 - траектория движения подвижного носителя;
12 - источник экологического загрязнения;
13 - линия движения подвижного источника 12 экологического загрязнения акватории.
В предлагаемом способе обнаружения подвижного источника экологического загрязнения водной среды измерение усредненных значений удельной электрической проводимости (УЭП) и пульсационных значений УЭП водной среды с подвижного носителя производится при помощи устройства, которое содержит размещаемые на подвижном носителе 10 преобразователь 1 усредненных значений УЭП воды и преобразователь 2 пульсационных значений УЭП водной среды, многоканальный аналого-цифровой преобразователь 3, устройство 4 гидрохимического анализа, спутниковую навигационную систему 5, цифровую электронно-вычислительную машину 6 с устройством 7 документирования, радиолокационную станцию 8 и информационную систему судоводителя 9.
Подвижный носитель 10 представляет собой, например, судно для экологического мониторинга акватории.
Преобразователи 1 и 2 могут быть выполнены на основе известного бесконтактного трансформаторного первичного преобразователя (кондуктометра) с выделением на выходе усредненных и пульсационных значений удельной электрической проводимости [4].
Устройство 4 гидрохимического анализа содержит один или несколько (например, три) магистральных трубопровода, по которым вода, поднятая с различных горизонтов акватории, подается на входные распределители гидравлических потоков, выходы которых посредством трубопроводов второго контура подключены к соответствующим входам многоканальных проточных анализаторов устройства гидрохимического анализа, предназначенных для независимого анализа проб воды, поступающей по каждому из магистральных трубопроводов. Кроме указанных магистральных трубопроводов и трубопроводов второго контура в составе гидравлической схемы устройства 4 гидрохимического анализа предусмотрен сливной трубопровод для сброса воды за борт подвижного носителя вне зоны водозабора и трубопроводы для закольцовки магистралей при их промывке моющим раствором. Для предотвращения попадания в измерительные каналы многоканальных проточных анализаторов механических взвесей головки водозабора забортных шлангов и головка водозабора устройства 4 снабжены сетчатыми фильтрами грубой очистки из нержавеющей стали, а на входах измерительных каналов анализаторов установлены фильтры тонкой очистки, выполненные в виде фторопластовых мембран. С целью снижения погрешности измерений, вызванной "засаливанием" стенок трубопроводов загрязняющими веществами, например нефтепродуктами или органическими веществами, все трубопроводы подачи пробы, включая забортные шланги, магистральные трубопроводы и трубопроводы второго контура, выполнены из фторопласта. Сливной трубопровод выполнен из нержавеющей стали, а трубопроводы для закольцовки магистрали выполнены из полиэтилена. Гидравлические выходы многоканальных проточных анализаторов через коллекторы-отстойники и кран-переключатель соединены со сливным трубопроводом и емкостью для сбора отработанных растворов.
Каждый многоканальный проточный анализатор оснащен блоком расходных емкостей и многоканальными перистальтическими насосами, установленными во всех измерительных каналах. Кроме отбора проб воды из трубопроводов второго контура эти же насосы обеспечивают ввод в измерительный канал реагентов, хранящихся в блоке расходных емкостей анализатора. Для переключения гидравлических трактов каждого канала предусмотрены многовходовые краны, управляемые блоком контроллера анализатора в соответствии с заложенными алгоритмами, определяющими расход и последовательность введения реагентов в зависимости от реализуемой в канале методики измерений. Сигнальные входы блока контроллера подключены к выходам детекторов соответствующих измерительных каналов анализатора, а выходы блоков контроллера всех анализаторов посредством интерфейсной магистрали RS-422 соединены со вторым входом цифровой электронно-вычислительной машины 6. Это обеспечивает считывание и предварительную обработку аналитических сигналов детекторов и параллельную передачу данных со всех измерительных каналов трех анализаторов. В качестве детекторов в измерительных каналах анализатора используются совмещенный фотометр-флюориметр для обнаружения и оценки содержания нефти, синтетических поверхностно-активных веществ и фенолов, ионометрические детекторы для обнаружения и измерения содержания фтора и хлора и фотометрические детекторы в каналах определения содержания в воде нитратов, нитритов, фосфатов, ионов меди и ионов аммония.
Цифровая электронная вычислительная машина 6 может быть выполнена в виде рабочей станции в морском исполнении на основе процессора Intel 486, Pentium 2, 3, 4 и т.п. с соответствующими контроллерами ввода-вывода, устройствами отображения цифровых данных и графической информации.
Устройство 7 документирования может быть выполнено в виде накопителя на жестком диске, входящем в состав цифровой вычислительной машины 6, а также в виде энергонезависимой памяти (flash-памяти), цифрового магнитофона или принтера, подключаемых к одному из выходов машины 6 через соответствующие адаптеры.
Остальные устройства хорошо известны и широко используются в технике.
Выход преобразователя 1 усредненных значений удельной электрической проводимости воды и выход преобразователя 2 пульсационных значений УЭП водной среды соединены соответственно с первым и вторым входами многоканального аналого-цифрового преобразователя 3, выход которого соединен с первым входом цифровой электронно-вычислительной машины 6. Выход устройства 4 гидрохимического анализа и выход спутниковой навигационной системы 5 соединены соответственно с вторым и третьим входами цифровой электронно-вычислительной машины 6, выход которой соединен с первым входом информационной системы 9 судоводителя, к второму входу которой подключен выход радиолокационной станции 8.
Предлагаемый способ осуществляют следующим образом.
При патрулировании подвижным носителем (судном) заданного района акватории одновременно производят непрерывное измерение параметров усредненных и пульсационных значений удельной электрической проводимости, гидрохимических параметров приповерхностного слоя воды и навигационных параметров, используя устройства 1, 2, 4 и 5. При этом на индикаторе информационной системы 9 судоводителя отображается карта-схема акватории и траектория 11 движения носителя 10.
Во время патрулирования усредненные значения удельной электрической проводимости воды сравнивают с фоновыми усредненными значениями удельной электрической проводимости воды, сравнивают интенсивность измеренных пульсационных значений удельной электрической проводимости воды с заданным порогом. При одновременном превышении усредненным значением удельной электрической проводимости воды фонового усредненного значения удельной электрической проводимости воды и интенсивностью пульсационных значений удельной электрической проводимости воды заданного порога осуществляют забор воды с одного или нескольких горизонтов акватории и производят ее гидрохимический анализ.
Магистральный насос обеспечивает подъем воды на борт носителя и ее подачу на входы измерительных каналов соответствующего многоканального проточного анализатора поверхностных вод. В соответствии с методикой измерений, реализуемой в конкретном канале, при необходимости осуществляют автоматическую пробоподготовку, которая заключается в смешивании поступающей пробы воды с необходимыми реагентами из блока расходных емкостей анализатора. Подача растворов осуществляется блоком перистальтических насосов соответствующего измерительного канала через многовходовой кран, управляемый блоком контроллера. Показания ионометрических, фотометрических детекторов и совмещенного фотометра-флюориметра после предварительной обработки в блоке контроллера поступают в цифровую вычислительную машину 6. На ее дисплей выводятся графики зависимостей изменения сигналов детекторов в единицах концентрации определяемых веществ и результаты сопоставления указанных зависимостей с пороговым уровнем, например предельно допустимой или среднефоновой концентрацией определяемого вещества. При необходимости корректировки используемой методики измерений с терминала оператора цифровой электронно-вычислительной машины 6 вводят необходимые параметры уточненного алгоритма, поступающие в блок контроллера. Данные текущих измерений всех каналов анализатора записываются на устройство 7 документирования. При обнаружении повышенного загрязнения по показаниям, по меньшей мере, одного измерительного канала на карте-схеме акватории делается отметка о времени обнаружения и концентрации загрязнителя, и эти данные сохраняются в автоматически формируемом цифровой электронно-вычислительной машиной 6 архиве.
Привязка карт-схем к географическим координатам производится по данным спутниковой навигационной системы 5 на четко зафиксированной стоянке катера в месте, имеющем характерные признаки на карте-схеме.
При обнаружении превышения заданной концентрации загрязняющих веществ продолжают движение патрульного катера до выхода из зоны, в которой выполняется условие одновременного превышения усредненным значением удельной электрической проводимости воды фонового усредненного значения удельной электрической проводимости воды и интенсивностью пульсационных значений удельной электрической проводимости воды заданного порога. После чего осуществляют разворот патрульного катера и его движение в обратном направлении (см. фиг.2). В случае повторного одновременного превышения усредненным значением удельной электрической проводимости воды фонового усредненного значения удельной электрической проводимости воды и интенсивностью пульсационных значений удельной электрической проводимости воды заданного порога и повторном обнаружении превышения заданной концентрации загрязняющих веществ принимают решение о наличии подвижного источника экологического загрязнения.
Цифровая электронно-вычислительная машина 6 выполнена с возможностью определения линии движения подвижного источника 12 экологического загрязнения акватории по положению прямой линии между точками А и Б (см. фиг.2) с максимальной интенсивностью пульсаций удельной электрической проводимости воды после первого и второго одновременного превышения усредненным значением удельной электрической проводимости воды фонового усредненного значения удельной электрической проводимости воды и интенсивностью пульсационных значений удельной электрической проводимости воды заданного порога. Точки А и Б определяют с помощью спутниковой навигационной системы 5 при движении в различных направлениях подвижного носителя 10, при одновременном превышении усредненным значением удельной электрической проводимости воды фонового усредненного значения удельной электрической проводимости воды и установленных среднефоновых значений концентрации, по меньшей мере, одного из контролируемых загрязняющих веществ, по результатам гидрохимического анализа, осуществляемого с помощью устройства 4 гидрохимического анализа, а информационная система 9 судоводителя выполнена с возможностью отображения географической карты, линии 13 движения подвижного источника экологического загрязнения акватории, траектории движения подвижного носителя 10, а также радиолокационной обстановки в акватории.
Направление движения подвижного источника 12 экологического загрязнения определяют по степени изменения концентрации загрязняющих веществ по предполагаемой линии 13 движения подвижного источника 12 экологического загрязнения.
После определения направления движения нарушителя осуществляют определение его координат с помощью радиолокационной станции 8, начинают преследование нарушителя и/или сообщают другим патрульным судам, иным службам о факте обнаружения загрязнений и направлении движения нарушителя.
Таким образом, технический результат от использования предлагаемого изобретения заключается в обеспечении возможности обнаружения и классификации подвижного носителя экологического загрязнения и определения линии и направления его движения.
Представленные чертежи и описание позволяют, используя существующие технические средства, осуществить предлагаемый способ обнаружения подвижного носителя экологического загрязнения, определения линии и направления его движения, а также для экологического мониторинга природных водоемов, для контроля очищенных сточных вод, а также оперативного определения состава и количественного содержания загрязняющих веществ в озерных и морских акваториях, что характеризует изобретение как промышленно применимое.
Источники информации
1. Система мониторинга качества воды. GRE Rev, 1988, №26, с.14-20.
2. Свидетельство РФ на ПМ №29376, МПК G 01 N 27/00, опубл. 10.05.2003.
3. Система для мониторинга приповерхностных вод. Fukuchi Mitsuo, Hottori Hitoshi, Proc. NIPR Symp. Polar Biol, 1987, №1, с.47-55.
4. Авт. Свид СССР №851241, МПК G 01 N 27/02, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| КОНФОРМНЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ ВОДЫ | 2007 |
|
RU2334223C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ЗВУКА В МОРСКОЙ ВОДЕ НА БОЛЬШИХ ГЛУБИНАХ С ПОДВОДНОГО НОСИТЕЛЯ | 2006 |
|
RU2313769C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ МОРСКОЙ ВОДЫ НА БОЛЬШИХ ГЛУБИНАХ С ПОДВОДНОГО НОСИТЕЛЯ | 2006 |
|
RU2320975C1 |
| СПОСОБ СБОРА ИНФОРМАЦИИ ОБ ЭКОЛОГИЧЕСКОМ СОСТОЯНИИ РЕГИОНА И АВТОМАТИЗИРОВАННАЯ СИСТЕМА АВАРИЙНОГО И ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА ОКРУЖАЮЩЕЙ СРЕДЫ РЕГИОНА | 2010 |
|
RU2443001C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИЯ ЗАГРЯЗНЕНИЯ ПРЕСНОВОДНОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453833C2 |
| СПОСОБ БИОИНДИКАЦИИ ЗАГРЯЗНЕНИЯ МОРСКОЙ ВОДЫ ТЯЖЕЛЫМИ МЕТАЛЛАМИ | 2003 |
|
RU2264465C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И МОНИТОРИНГА ЗАГРЯЗНЕНИЙ МОРСКОГО НЕФТЕГАЗОВОГО ПРОМЫСЛА | 2015 |
|
RU2587109C1 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| СПОСОБ ОЦЕНКИ КАЧЕСТВА ДРЕНАЖНЫХ ВОД С ОРОШАЕМЫХ ЗЕМЕЛЬ | 2023 |
|
RU2820684C1 |
Изобретение относится к способам экологического контроля водной среды путем непрерывного измерения физических и химических параметров среды, а также оперативного определения состава и количественного содержания загрязняющих веществ в озерных и морских акваториях. Технический результат - обеспечение возможности классификации подвижного источника экологического загрязнения и определения линии и направления его движения. Сущность: предлагаемый способ характеризуется тем, что одновременно измеряют усредненные значения удельной электрической проводимости (УЭП) и пульсационные значения УЭП водной среды с подвижного носителя. Результаты измерения сравнивают с заданными порогами, при обнаружении превышения заданных значений осуществляют забор воды и производят ее гидрохимический анализ. При обнаружении превышения заданной концентрации загрязняющих веществ продолжают движение подвижного носителя до выхода из зоны, в которой обнаружено превышение заданных значений усредненным значением УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды. После чего осуществляют разворот подвижного носителя и его движение в обратном направлении, в случае повторного одновременного превышения усредненным значением УЭП водной среды фонового усредненного значения УЭП водной среды и интенсивностью пульсационных значений УЭП водной среды заданного порога и повторном обнаружении превышения заданной концентрации загрязняющего вещества принимают решение о наличии подвижного источника экологического загрязнения. 1 з.п. ф-лы, 2 ил.

| СПОСОБ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ | 1991 |
|
RU2023259C1 |
| УСТРОЙСТВО ДЛЯ ЭКОЛОГИЧЕСКОГО КОНТРОЛЯ ЗАГРЯЗНЕНИЙ ВОДНОЙ СРЕДЫ | 1990 |
|
RU2030747C1 |
| Устройство для контроля загрязнений водной среды | 1990 |
|
SU1837217A1 |
| Кондуктометр | 1979 |
|
SU851241A1 |
| Устройство для измерения электропроводимости потоков жидкости | 1980 |
|
SU928215A1 |
| Устройство для измерения удельной электрической проводимости морской воды | 1987 |
|
SU1474561A1 |
| Устройство для измерения электро-пРОВОдНОСТи | 1979 |
|
SU832435A1 |
| US 3806798 А, 23.04.1974 | |||
| JP 55082961 А, 23.06.1980. | |||

