Изобретение относится к области исследования гидрофизических параметров морской воды и может быть использовано для измерения плотности морской воды.
Практика современных океанологических исследований показывает, что при решении ряда задач необходимы прецизионные измерения и оперативная обработка различной гидрофизической информации в реальном масштабе времени на борту носителя аппаратуры при длительной эксплуатации. Основной целью подобных исследований является построение информационных карт гидрологических полей, изучение их временной и пространственной изменчивости, тонкой структуры, выявление аномальных гидрофизических зон и др.
Эффективность океанологических исследований определяется техническими характеристиками используемой измерительной техники - диапазоном измерений гидрофизических параметров, чувствительностью, погрешностью измерений, а также надежностью измерительных средств и состоянием их метрологического обеспечения.
Известны различные системы, предназначенные для анализа состояния морской среды [1-10], содержащие преобразователи гидрохимико-физических параметров водной среды и регистрирующую аппаратуру. Аппаратура обеспечивает сбор и обработку данных с преобразователей гидрофизических параметров и регистрацию результатов обработки.
Известно устройство для контроля загрязнений водной среды, раскрытое в описании изобретения [11], содержащее датчик электропроводности, датчик температуры, датчик водородного показателя, датчик окислительно-восстановительного потенциала, ионоселективный датчик и датчик растворенного кислорода. Это устройство позволяет повысить достоверность контроля загрязнений водной среды за счет расширения функциональных возможностей путем классификации загрязнений по группам.
Одним из основных параметров морской воды является ее плотность. Известно, что плотность морской воды зависит от ее солености, температуры и гидростатического давления. Поэтому способ измерения плотности морской воды включает измерение солености морской воды, ее температуры и гидростатического давления с последующим расчетом плотности по известным формулам. Указанные параметры морской воды могут быть измерены с помощью зонда-батометра, посредством которого производят отбор глубинных проб морской воды, измерение ее температуры и давления с последующим определением солености морской воды на борту судна.
Недостатками такого способа измерения плотности являются большая трудоемкость и низкая оперативность измерений.
Наиболее близким к предлагаемому и выбранным в качестве прототипа является способ измерения плотности морской воды, раскрытый в описании измерительной системы химико-физических параметров водной среды автоматической [12], включающий измерение температуры, давления и удельной электрической проводимости морской воды при помощи системы, содержащей по меньшей мере один преобразователь гидрохимико-физических параметров водной среды, включающий в себя контактный преобразователь удельной электрической проводимости водной среды, преобразователь температуры, преобразователь водородного показателя, преобразователь значения окислительно-восстановительного потенциала, электрод сравнения, преобразователь массовой концентрации растворенного кислорода, преобразователь глубины, автономный двуполярный источник напряжения питания, запитывающий повторители напряжения, входящие в состав преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала и электрода сравнения, и аналого-цифровой преобразователь с контроллером интерфейса RS-485 на выходе, а также связанную с преобразователем гидрофизических параметров морской среды электронно-вычислительную машину (ЭВМ) с клавиатурой, подключенной к входу-выходу ЭВМ для подключения клавиатуры, и устройством отображения информации (УОИ), подключенным к выходу ЭВМ для подключения УОИ, при этом первичные измерительные преобразователи контактного преобразователя удельной электрической проводимости водной среды, преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины, а также электрод сравнения, общий для преобразователя водородного показателя и преобразователя значения окислительно-восстановительного потенциала, установлены в передней части герметичного цилиндрического корпуса преобразователя гидрохимико-физических параметров водной среды, выполненного из материала, стойкого к воздействию агрессивной среды, первичный измерительный преобразователь (ПИП) контактного преобразователя удельной электрической проводимости водной среды имеет форму обтекаемого тела вращения, расположен соосно корпусу преобразователя гидрохимико-физических параметров водной среды и содержит пару токовых электродов, один из которых имеет круглую форму и расположен в носовой части ПИП контактного преобразователя удельной электрической проводимости, а другой образован корпусом ПИП контактного преобразователя удельной электрической проводимости, и пару кольцевых потенциальных электродов, расположенных между токовыми электродами соосно этим электродам и изолированных один от другого и от токовых электродов, ПИП преобразователя температуры выполнен из тонкой изолированной медной проволоки, расположенной между двумя полыми тонкостенными цилиндрами, один из которых образован выступом в корпусе ПИП преобразователя температуры, а другой герметично скреплен, преимущественно сварен лазерной сваркой, с первым полым тонкостенным цилиндром и корпусом ПИП преобразователя температуры, в котором выполнены наклонные отверстия для протекания жидкости внутри первого полого тонкостенного цилиндра, ПИП преобразователя водородного показателя выполнен в виде электрода для определения водородного показателя, к которому подключен повторитель напряжения электрода для определения водородного показателя, ПИП преобразователя значения окислительно-восстановительного потенциала выполнен в виде платинового электрода для определения значения окислительно-восстановительного потенциала, к которому подключен повторитель напряжения платинового электрода для определения значения окислительно-восстановительного потенциала, ПИП преобразователя массовой концентрации растворенного кислорода выполнен в виде двухэлектродной ячейки для определения массовой концентрации растворенного кислорода, к выходу которой подключен преобразователь ток-напряжение, ПИП преобразователя глубины выполнен в виде тензометрического мостового преобразователя давления, первичные измерительные преобразователи преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины, а также электрод сравнения расположены в передней части герметичного цилиндрического корпуса преобразователя гидрохимико-физических параметров водной среды вокруг ПИП контактного преобразователя удельной электрической проводимости водной среды, выходы контактного преобразователя удельной электрической проводимости водной среды, преобразователя температуры, преобразователя водородного показателя, преобразователя значения окислительно-восстановительного потенциала, электрода сравнения, преобразователя массовой концентрации растворенного кислорода и преобразователя глубины подключены к входам аналого-цифрового преобразователя, вход-выход контроллера интерфейса RS-485 соединен последовательным каналом связи с соответствующим входом-выходом электронно-вычислительной машины, которая расчетными методами на основе данных, получаемых от преобразователя гидрохимико-физических параметров водной среды, определяет плотность морской воды, а также осуществляет визуализацию обработанных результатов измерения, архивирование и документирование измерительной информации.
Недостатками способа-прототипа является ограниченная глубина, на которой возможны измерения, определяемая глубиной погружения носителя, на котором установлена система.
Задачей, решаемой изобретением, является создание способа измерения плотности морской воды на большой глубине без необходимости погружения носителя на эту глубину.
Сущность изобретения заключается в том, что способ измерения плотности морской воды на большой глубине заключается в том, что измеряют соленость морской воды, температуру морской воды и давление, при этом значение плотности морской воды определяют расчетным путем, измерение солености морской воды производят на глубине, превышающей глубину галаклина при помощи средств измерения, расположенных на подводном носителе, температуру морской воды и давление измеряют с помощью зонда, причем при расчете значения плотности морской воды значение солености принимают равным значению солености, измеренному с помощью средств измерения, расположенных на подводном носителе.
Зонд может быть буксируемым при помощи подводного носителя или может использоваться обрывной зонд.
Зонд сбрасывается с подводного носителя. Перед сбрасыванием обрывного зонда производят калибровку средств измерения, расположенных на зонде по данным средств измерений, расположенных на подводном носителе.
Способ может быть реализован при помощи системы для плотности морской воды, содержащей размещаемые на подводном носителе преобразователь удельной электрической проводимости морской воды, преобразователь температуры, преобразователь давления, подключенные к аналого-цифровому преобразователю (АЦП), при этом преобразователь удельной электрической проводимости морской воды содержит первичный измерительный преобразователь (ПИП) удельной электрической проводимости морской воды и измерительный усилитель, преобразователь температуры содержит ПИП температуры и измерительный усилитель, преобразователь давления содержит ПИП давления и измерительный усилитель, выход АЦП подключен к вычислительному устройству, а также содержащей обрывной зонд или буксируемый зонд, на котором расположены ПИП температуры зонда и ПИП давления зонда, выходы которых подключены к измерительным усилителям, расположенным на подводном носителе, выходы которых подключены к АЦП, выход вычислительного устройства является выходом данных системы для измерения плотности морской воды.
Способ также может быть реализован при помощи системы для измерения плотности морской воды, содержащей размещаемые на подводном носителе преобразователь удельной электрической проводимости морской воды, преобразователь температуры, преобразователь давления, подключенные к АЦП, при этом преобразователь удельной электрической проводимости морской воды содержит ПИП удельной электрической проводимости морской воды и измерительный усилитель, преобразователь температуры содержит ПИП температуры и измерительный усилитель, преобразователь давления содержит ПИП давления и измерительный усилитель, выход АЦП подключен к вычислительному устройству, а также содержащей обрывной зонд или буксируемый зонд, на котором расположены ПИП температуры зонда и ПИП давления зонда, выходы которых подключены к измерительным усилителям, расположенным также на зонде, выходы которых подключены к АЦП зонда, выход АЦП зонда является выходом цифрового канала связи и соединен с соответствующим входом вычислительного устройства, выход вычислительного устройства является выходом данных системы для измерения плотности морской воды.
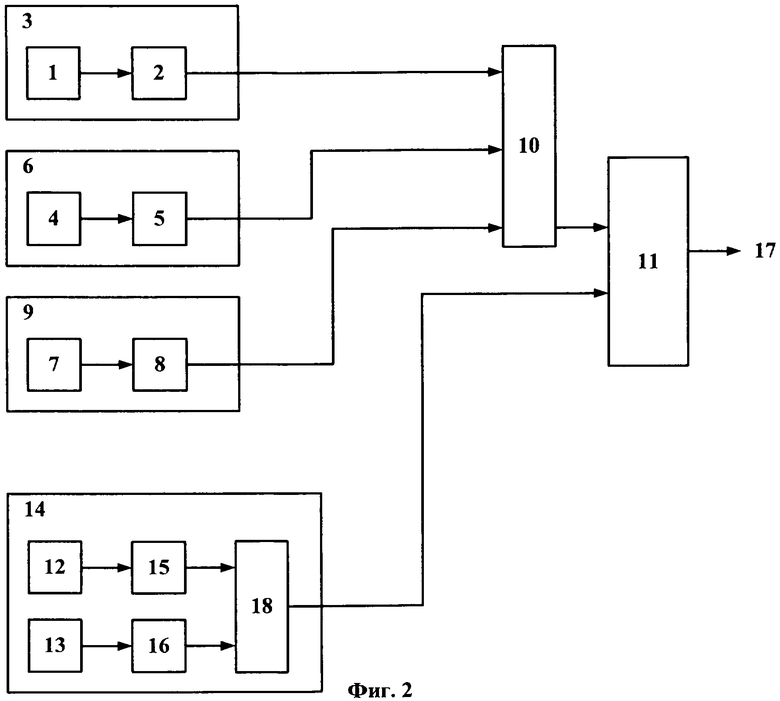
Сущность изобретения поясняется чертежами, на которых изображена функциональная схема системы для измерения гидрофизических параметров морской воды (два варианта). На фиг.1 приведена функциональная схема системы для измерения гидрофизических параметров морской воды, в которой зонд связан с подводным носителем аналоговым каналом связи, а на фиг.2 приведена функциональная схема системы для измерения гидрофизических параметров морской воды, в которой зонд связан с подводным носителем цифровым каналом связи.
На чертежах обозначено:
1 - ПИП удельной электрической проводимости морской воды;
2 - измерительный усилитель;
3 - преобразователь удельной электрической проводимости морской воды;
4 - ПИП температуры;
5 - измерительный усилитель;
6 - преобразователь температуры;
7 - ПИП давления;
8 - измерительный усилитель;
9 - преобразователь давления;
10 - АЦП;
11 - вычислительное устройство;
12 - ПИП температуры зонда;
13 - ПИП давления зонда;
14 - обрывной зонд;
15 - измерительный усилитель;
16 - измерительный усилитель;
17 - выход данных;
18 - АЦП зонда.
В качестве вычислительного устройства 11 может использоваться микропроцессор, микроконтроллер или электронно-вычислительная машина (ЭВМ). Вычислительное устройство 11 может быть оснащено устройствами ввода и вывода, позволяющими отображать результаты измерений и задавать различные режимы измерений.
Измерительные усилители 2, 5, 8, 15, 16 выполнены по известным схемам, например в виде мостовых усилителей.
В системе по схеме фиг.2 АЦП 18 зонда выполнен в виде АЦП со встроенным адаптером цифрового канала связи. При этом зонд 14 имеет собственный автономный источник питания.
Передачу данных, полученных при помощи средств измерения, расположенных на зонде, могут осуществлять по беспроводному гидроакустическому каналу связи.
Способ реализуется следующим образом. Подводный носитель опускается на глубину, превышающую глубину галаклина. Производятся измерения электрической проводимости морской воды, температуры и давления при помощи соответственно преобразователя 3 удельной электрической проводимости морской воды, преобразователя 6 температуры и преобразователя 9 давления. Результаты измерений преобразуются в АЦП 10 в цифровую форму и передаются в вычислительное устройство 11. При помощи ПИП 12 температуры зонда и ПИП 13 давления зонда, а также измерительных усилителей 15 и 16 также производится измерение температуры и давления. Результаты измерений также преобразуются в АЦП 10 в цифровую форму и передаются в вычислительное устройство 11. Вычислительное устройство 11 на основании данных, полученных от преобразователя 6 температуры и преобразователя 9 давления, осуществляет вычисление поправок для измерений, осуществляемых зондом 14. Поправки могут вычисляться, например, как разность между значениями, получаемыми при помощи средства измерения зонда, и значениями, получаемыми при помощи средств подводного носителя. При дальнейших измерениях средствами зонда используются значения, равные разности между значениями, получаемыми от средств измерений зонда и вычисленными поправками.
Вычислительное устройство 11 осуществляет вычисление солености морской воды. Вычисление солености производится по шкале практической солености (ШПС-78) следующим образом:
определяется зависимость относительной электропроводности растворов нормальной воды от температуры rТ:

где χ - удельная электрическая проводимость, мСм/см;
Т - температура, °С;
определяется влияние гидростатического давления на относительную электропроводность Rp:

где R - относительная электропроводность воды с соленостью S [‰], температурой T [°С] при давлении p [МПа] по отношению к стандартному раствору KCl при 15°С или эквивалентного ему раствора нормальной морской воды.
 χ(35,15,0)=42,11 мСм/см;
χ(35,15,0)=42,11 мСм/см;
определяется RT - относительная электропроводность воды с соленостью S [‰], температурой T [°С] при атмосферном давлении по отношению к раствору нормальной морской воды при той же температуре
вычисляется практическая соленость S:

Производят сброс обрывного зонда 14 и начинают сбор данных, поступающих от зонда 14.
На основании полученных данных строится зависимость плотности морской воды от глубины. При этом соленость морской воды считают не зависящей от глубины погружения зонда 14 и в расчетах используется значение практической солености S, полученное на основании данных измерения электрической проводимости морской воды, температуры и давления соответственно преобразователем 3 удельной электрической проводимости морской воды, преобразователем 6 температуры и преобразователем 9 давления.
Вычисление глубины производится в функции гидростатического давления с учетом широты следующим образом:
 ,
,
где p - гидростатическое давление, МПа;
ϕ - географическая широта, градусы.
Плотность морской среды вычисляют по международному уравнению состояния морской воды УС-80.
Плотность ρ (кг/м3) морской воды в функции практической солености S, температуры T и гидростатического давления p определяют по формуле
 ,
,
где K(S, T, p) - средний модуль упругости морской воды;
ρ - плотность, кг/м3;
T - температура, °С;
S - соленость, ‰;
p - гидростатическое давление, МПа.
Плотность морской воды при атмосферном давлении (p=0) определяют по соотношению
 ,
,
где b0=8,24493·10-1; b1=-4,0899·10-3; b2=7,6438·10-5; b3=-8,2467·10-7; b4=5,3875·10-9; c0=-5,72466·10-3; c1=1,0227·10-4; с2=-1,6546·10-6; d0=4,8314·10-4.
Плотность эталонной чистой среднеокеанической воды ρω определяют по формуле

где a0=999,842594; a1=6,793952·10-2; a2=-9,095290·10-3; a3=1,001685·10-4; a4=-1,120083·10-6; a5=6,536332·10-9.
Средний модуль упругости морской воды определяют по формуле

где K(S,T,0)=Kω+(f0+f1T+f2T2+f3T3)S+(g0+g1T+g2T2)S3/2;
f0=5,46746; f1=-6,03459·10-2; f2=1,09987·10-3; f3=-6,1670·10-6;
g0=7,944·10-3; g1=1,6483·10-3; g2=-5,3009·10-5;
A=Aω+(i0+i1T+i2T2)S+j0S3/2;
i0=2,2838·10-3; i1=-1,0981·10-5; i2=-1,6078·10-6; j0=1,91075·10-4;
B=Bω+(m0+m1T+m2T2)S;
m0=-9,9348·10-6; m1=2,0816·10-7; m2=9,1697·10-9;
Kω=e0+e1T+e2T2+e3T3+e4T4;
e0=1965,221; e1=14,84206; e2=-2,327105·10-1; e3=1,360477·10-3;
e4=-5,155288·10-6;
Aω=h0+h1T+h2T2+h3T3;
h0=3,239908; h1=1,43713·10-3; h2=1,16092·10-4; h3=-5,77905·10-7;
Bω=k0+k1T+k2T2;
k0=8,50935·10-4; k1=-6,12239·10-5; k2=5,2787·10-7.
Вычисленные данные о зависимости плотности морской воды передаются через выход 17 данных потребителям информации.
Глубина галаклина определяется при погружении подводного носителя. В процессе погружения носителя производится непрерывное измерение солености морской воды и вычисление градиента солености. При достижении градиентом солености значения, меньшего заданного порога, принимается решение о достижении глубины, превышающей глубину галаклина. Порог может быть выбран равным 0.001‰/м.
Для определения глубины галаклина также может использоваться априорная (справочная) информация о распределении солености морской воды для данного района Мирового Океана, например данные о зависимости распределения солености морской воды по глубине, приведенные в [13]-[15].
Таким образом, описанный способ может использоваться для определения плотности морской воды на глубинах, превосходящих глубину погружения подводного носителя. Представленные описание и чертеж позволяют реализовать способ с использованием известных средств, что характеризует изобретение как промышленно применимое.
СПИСОК ЛИТЕРАТУРЫ
1. Буторин В.П. и др. Аппаратура сбора и обработки информации для автоматических контрольно-замерных станций систем контроля окружающей среды типа "АНКОС" / Сб. докл. Семинар Автоматизация контроля загрязнения окружающей Среды. - М.: МДНТП. - 1988.
2. Система мониторинга качества воды / Нихон мусэн тихо // GRE Rev. - 1988, № 26. - С.14-20.
3. Система для мониторинга приповерхностных вод / Fukuchi Mitsuo, Hottori Hitoshi. - Proc. NIPR Symp. Polar Biol. - 1987, 1. - С.47-55.
4. Burr P. An instrumented underwater towed vehicle. Oceanology internationale 69. Conf. technical sessions, day 1. - Brighton. - 1969 (Англия).
5. Analysis of Exploration of Mining Technology for Manganese Nodyles / Seabed Minerals Sessions. - Vol.2. - United Ocean Economics and Technology Branch (Published in cooperation with the United Nations by Graham & Trotman Ltd.). - 1984. - P.20, fig.3.
6. Патент РФ № 2030747 на изобретение, МПК G01N 33/18, 1990 г.
7. Свидет. РФ № 301 на полезную модель, МПК В63В 38/00, 1993 г.
8. Свидет. РФ № 2797 на полезную модель, МПК В63В 35/00, 1996 г.
9. Свидет. РФ № 3041 на полезную модель, МПК G01N 27/00, 1996 г.
10. Авт. свидет. СССР № 1029063 на изобретение, МПК G01N 27/02, 1981 г.
11. Патент РФ № 1837217 на изобретение, МПК G01N 27/00, 1990 г.
12. Свидет. РФ № 29376 на полезную модель, МПК G01N 27/00, 2003 г. (прототип).
13. Океанология. Физика океана. Т.1. Гиброфизика океана / отв. ред. В.М.Каменкович, А.С.Монин, М.: "Наука", 1978. С.14-25.
14. Смирнов Г.Н. Океанология. Учебник для втузов. М.: "Высш. школа", 1974. С.17-23.
15. Богородский В.В., Гусев А.В., Доронин Ю.П., Кузнецова Л.П., Шифрин К.С. Физика океана. Л.: "Гидрометеоиздат", 1978. С.137-139.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ ЗВУКА В МОРСКОЙ ВОДЕ НА БОЛЬШИХ ГЛУБИНАХ С ПОДВОДНОГО НОСИТЕЛЯ | 2006 |
|
RU2313769C1 |
| КОНФОРМНЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ ВОДЫ | 2007 |
|
RU2334223C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВИЖНОГО ИСТОЧНИКА ЭКОЛОГИЧЕСКОГО ЗАГРЯЗНЕНИЯ ВОДНОЙ СРЕДЫ | 2003 |
|
RU2241981C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ МОРСКОЙ ВОДЫ С ПОДВИЖНОГО НОСИТЕЛЯ ГИДРОФИЗИЧЕСКОЙ АППАРАТУРЫ | 2020 |
|
RU2747854C2 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2009 |
|
RU2411553C1 |
| Методика верификации измерений солености морской воды автоматическими средствами измерений | 2020 |
|
RU2747739C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
Изобретение относится к области исследования гидрофизических параметров морской воды и может быть использовано для измерения плотности морской воды. Техническим результатом изобретения является возможность измерения плотности морской воды на больших глубинах без необходимости погружения носителя на эти глубины. Сущность изобретения заключается в том, что способ включает измерение солености морской воды, температуры морской воды и давления. Температуру морской воды и давление измеряют с помощью обрывного зонда, который сбрасывают с подводного носителя. Измеряют удельную электрическую проводимость морской воды, температуру морской воды и давление соответственно преобразователем удельной электрической проводимости морской воды, преобразователем температуры и преобразователем давления, расположенными на подводном носителе. Перед сбрасыванием обрывного зонда производят калибровку средств измерений. Измерение солености морской воды производят на глубине, превышающей глубину галаклина при помощи средств измерения. При расчете значения плотности морской воды значение солености принимают равным значению солености, измеренному с помощью преобразователя удельной электрической проводимости морской воды, преобразователя температуры и преобразователя давления, расположенных на подводном носителе. 1 з.п. ф-лы, 2 ил.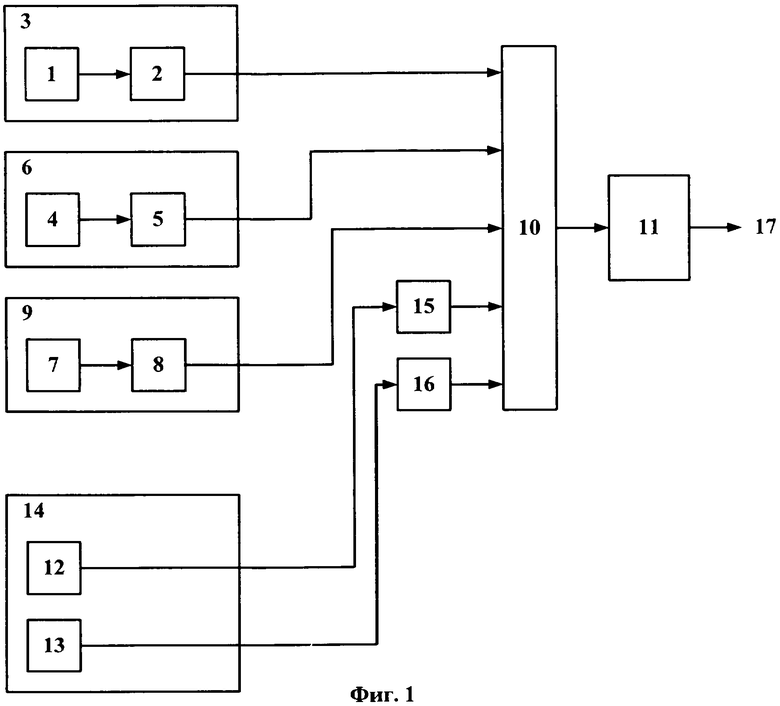
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ЗАЛЕГАНИЯ СЛОЯ СКАЧКА ПЛОТНОСТИ МОРСКОЙ ВОДЫ | 1991 |
|
RU2014587C1 |
| Батизонд для глубоководных измере-Ний пАРАМЕТРОВ МОРСКОй ВОды | 1979 |
|
SU800785A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| Способ автоматического определения в условиях океана параметров состояния морской воды | 1976 |
|
SU717633A1 |
| Устройство для ослабления качки судов | 1930 |
|
SU29376A1 |
| Прибор для измерения и автоматической регистрации плотности воды на различных глубинах | 1948 |
|
SU84211A1 |
| US 3117454, 14.01.1964. | |||

