Изобретение относится к электротехнике и может быть использовано при создании и эксплуатации электродвигателей с короткозамкнутым ротором.
Наиболее близким к предлагаемому способу является способ определения вращающего момента электродвигателей с короткозамкнутым ротором [1].
Недостатком известного способа определения вращающего момента электродвигателей с короткозамкнутым ротором является то, что считалось о создании вращающего момента лишь тогда, когда движение проводников ротора всегда меньше скорости вращения магнитного поля двигателя. Разность скоростей вращения магнитного поля статора и ротора n1-n2=ns называют скоростью скольжения. Относительную скорость характеризуют безразмерной величиной S, определяемой отношением:
 ,
,
называемой скольжением.
Скольжение выражают также в долях единицы  .
.
Двигатели, имеющие различные скорости вращения ротора и магнитного поля статора, называются асинхронными.
При наличии скольжения возникает электромагнитный вращающий момент, равный

где k - коэффициент пропорциональности;
ФСТ - магнитный момент статора;
 - ток ротора;
- ток ротора;
ϕ2 - угол между ФСТ и  .
.
В [1] и во всех других литературных источниках считалось, что единственным моментом, обеспечивающим прямое вращение асинхронных двигателей, является электромагнитный момент.
Максимальный вращающий момент возникает только при скольжении, равном 1, когда скорость ротора n2=0, т.е. при пуске двигателя. Режим холостого хода имеет место в том случае [1], когда ротор с замкнутой обмоткой вращается по направлению вращения поля с синхронной скоростью, т.е. n1=n2. При этом ток в роторе отсутствует.
Потери электрической энергии в асинхронном двигателе пропорциональны скольжению. Поэтому для ограничения электрических потерь в электродвигателе и достижения достаточно высокого КПД его рассчитывают и конструируют таким образом, чтобы при нагрузке, характеризуемой номинальной мощностью, скорость вращения ротора незначительно отличалась от синхронной скорости вращения поля.
Однако при этом электромагнитный вращающий момент имеет минимальное значение, а при скольжении, равном нулю, этот момент также имеет нулевое значение, но двигатель продолжает работать с синхронной скоростью.
Нельзя также не отметить другие взаимоисключающие положения существующего принципа работы электродвигателя с короткозамкнутым ротором, которые значительно затрудняют решение вопросов повышение уровня его технических характеристик.
К этому в первую очередь относятся следующие представления о взаимосвязи нагрузки, вращающего момента двигателя и величины напряжения питающей электрической сети.
Известно, что вращающий момент прямо пропорционален квадрату питающего напряжения, но в то же время отмечается увеличение Мвр при повышении нагрузки. Однако рост нагрузки двигателя вызывает понижение напряжения на выводах статорной обмотки, что определяет снижение вращающего момента. Таким образом возникает замкнутый круг безответных вопросов.
Цель изобретения - повышение уровня технических характеристик и коэффициента полезного действия (КПД) электродвигателей с короткозамкнутым ротором.
Указанная цель достигается тем, что вращающий момент электродвигателя с короткозамкнутым и фазным ротором определяется соотношением
МВР=k·Ф1·Ф2·sinβ,
где Ф1 и Ф2 - потоки в магнитопроводе, порождаемые переменным током в статорной обмотке электродвигателя;
k - коэффициент пропорциональности;
β - угол между потоками Ф1 и Ф2.
Причем поток Ф1 для каждой из трех фаз трехфазной электрической сети формируется током, равным геометрической сумме двух токов, вектора которых совпадают с векторами первых двух напряжений прямого чередования фаз АВС, ВСА и CAB, а поток Ф2 для каждой фазы формируется током, вектор которого опережает на 90° вектор третьего по порядку напряжения прямого чередования фаз, и при наличии потоков Ф1 и Ф2 происходит вращение ротора в сторону меньшего потока относительно большего потока с учетом угла β в пределах от 0 до 180°.
Этот вращающий момент можно назвать магнитным моментом в отличие от электромагнитного момента, где происходит взаимодействие между электрическим током ротора и магнитным потоком статора.
Здесь следует отметить, что магнитные потоки ротора  и
и  не создают каких-либо вращающих моментов с потоками статора
не создают каких-либо вращающих моментов с потоками статора  и
и  и их значения увеличиваются при росте сетевого напряжения.
и их значения увеличиваются при росте сетевого напряжения.
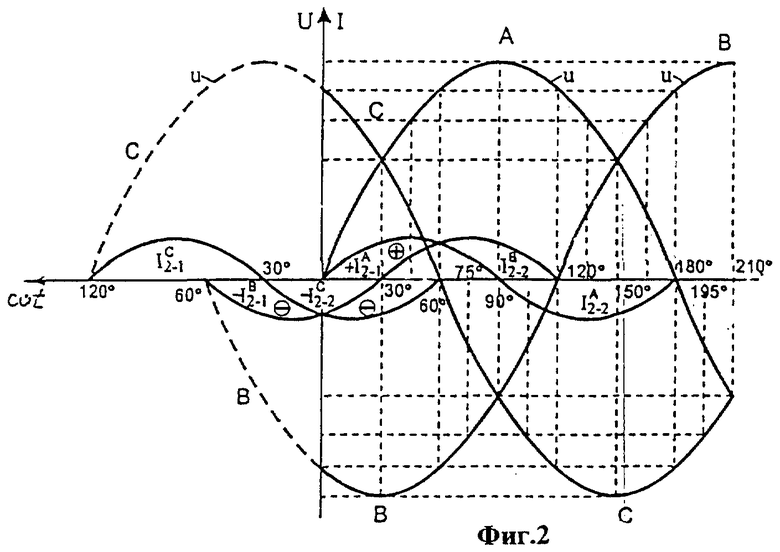
На фиг.1 представлен режим работы эл. двигателя с подключенными выводами фаз а, б, с соответственно к выводам генератора фаз А, В, С. На фиг.2 изображены синусоидальные кривые напряжения (50 Гц) и токов (100 Гц) фаз А, В, С, а на фиг.3 - векторная диаграмма токов  для кривых токов фаз А, В и С, которые пересекают ось ординат. Это соответствует правилу построения векторных диаграмм для фиксированного момента времени. В данном построении значение ωt принято равным нулю, а направление стрелки оси абсцисс справа налево показывает перемещение синусоидальных кривых фаз А, В и С в указанном направлении [2, стр. 27].
для кривых токов фаз А, В и С, которые пересекают ось ординат. Это соответствует правилу построения векторных диаграмм для фиксированного момента времени. В данном построении значение ωt принято равным нулю, а направление стрелки оси абсцисс справа налево показывает перемещение синусоидальных кривых фаз А, В и С в указанном направлении [2, стр. 27].
Начало фазы кривой тока  совпадает с началом синусоидальной кривой напряжения UA, а положительный знак синусоиды этого тока определит совпадение его вектора
совпадает с началом синусоидальной кривой напряжения UA, а положительный знак синусоиды этого тока определит совпадение его вектора  с направлением вектора UA.
с направлением вектора UA.
Начало синусоид токов  и
и  опережает начало синусоиды напряжения UA на угол соответственно 60° и 30°, но отрицательные знаки синусоид этих токов определяют отставание вектора тока
опережает начало синусоиды напряжения UA на угол соответственно 60° и 30°, но отрицательные знаки синусоид этих токов определяют отставание вектора тока  на угол 120°, а вектора тока
на угол 120°, а вектора тока  - на угол 150° от вектора напряжения UA.
- на угол 150° от вектора напряжения UA.
Вектор тока  , равный геометрической сумме векторов токов
, равный геометрической сумме векторов токов  и
и  , будет опережать вектор тока
, будет опережать вектор тока  на угол 90°. Токи
на угол 90°. Токи  и
и  будут определять соответственно возникновение двух потоков Ф1 и Ф2, каждый из которых совпадает со своим током.
будут определять соответственно возникновение двух потоков Ф1 и Ф2, каждый из которых совпадает со своим током.
Взаимодействие этих потоков определит вращающий момент для фазы А. Этот вращающий момент в соответствии с известной формулой будет равен:
МВР=k·Ф1·Ф2·sinβ.
Аналогичные вращающиеся моменты возникают и для фаз В и С.
Согласно фиг.3 очевидно, что последовательность векторов  ,
,  и
и  определит направление бегущего магнитного поля против часовой стрелки.
определит направление бегущего магнитного поля против часовой стрелки.
При включении электродвигателя в сеть возникает режим короткого замыкания, на выводах статорной обмотки напряжение снижается. Поэтому в этом случае токи  ,
,  и
и  также уменьшаются, вызывая снижение вращающего момента. В этом режиме основным вращающим моментом двигателя является электромагнитный момент. По мере разгона электродвигателя скольжение и ток ротора уменьшаются. Следовательно, уменьшается электромагнитный момент, но из-за роста напряжения увеличивается магнитный момент, который главным образом обеспечивает работу двигателя в устойчивом асинхронном режиме. При скольжении от 0,5 до 1 работу двигателя обеспечивает главным образом электромагнитный момент, но в этом неустойчивом режиме его работы происходят большие потери электроэнергии и возникают условия, сокращающие срок службы из-за перегрева, остановки и возможности его повреждения.
также уменьшаются, вызывая снижение вращающего момента. В этом режиме основным вращающим моментом двигателя является электромагнитный момент. По мере разгона электродвигателя скольжение и ток ротора уменьшаются. Следовательно, уменьшается электромагнитный момент, но из-за роста напряжения увеличивается магнитный момент, который главным образом обеспечивает работу двигателя в устойчивом асинхронном режиме. При скольжении от 0,5 до 1 работу двигателя обеспечивает главным образом электромагнитный момент, но в этом неустойчивом режиме его работы происходят большие потери электроэнергии и возникают условия, сокращающие срок службы из-за перегрева, остановки и возможности его повреждения.
По мере разгона электродвигателя напряжение в питающей сети повышается и двигатель переходит в синхронный режим работы, если мощность нагрузки не превосходит значения РКР. Каждому значению напряжения питающей сети соответствует критическое значение активной мощности РКР, при превышении которого наступает асинхронный режим его работы. Увеличение или снижение напряжения вызывает соответственно увеличение или снижение критической активной мощности электродвигателя с короткозамкнутым ротором. При наличии сопротивлений, подключенных к обмоткам фазного ротора, возникает асинхронный режим работы двигателя, а при изменении величины сопротивлений меняется и скорость ротора.
Таким образом, при работе двигателя с короткозамкнутым ротором при нагрузке менее РКР, когда скольжение равно нулю, обеспечиваются наименьшие электрические потери и высокий коэффициент его полезного действия.
При увеличении момента сопротивления механизма происходит смещение ротора относительно магнитного поля статора. Так как магнитные линии обладают свойством упругости, двигатель не переходит сразу в асинхронный режим работы. При этом растет активный ток статора, но в роторе ток равен нулю, т.е. в его токопроводе отсутствуют потери. Поэтому при расчете и конструировании двигателей должно исключаться обязательное условие традиционного принципа его работы: сохранение номинального скольжения 2-7%. Это позволит значительно сократить потери электрической энергии и уменьшить сечение токопровода ротора. При достижении критической мощности двигателя наступает асинхронный режим его работы и в токопроводе ротора появляется ток, увеличение которого при росте скольжения обусловливает значительные потери электрической энергии. С учетом установления нового магнитного вращающего момента оптимальный профиль глубокопазного двигателя представляется возможным выполнять в форме равностороннего треугольника, одна из вершин которого направлена к валу двигателя, а в качестве материала токопровода ротора не исключается вариант использования алюминия. Следовательно, большое сечение медного проводника рабочей обмотки или увеличение сечения стержня ротора с глубоким пазом в направлении вала ротора двигателя - ошибочные решения, снижающие КПД двигателя.
При уменьшении объема меди увеличивается объем магнитопровода ротора. Следовательно, будет возрастать магнитный момент, что приведет к увеличению КПД двигателя.
На фиг.4. представлен режим работы эл. двигателя с подключенными выводами фаз а, с, б соответственно к выводам генератора фаз А, В, С.
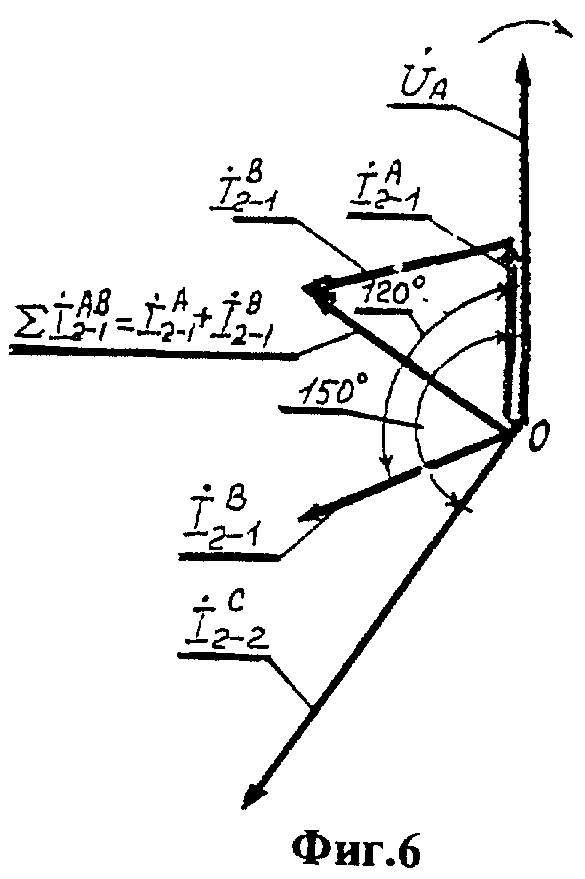
На фиг.5 изображены синусоидальные кривые напряжения (50 Гц) и токов (100 Гц) фаз А, В, С, а на фиг.6 - векторная диаграмма токов  ,
,  и
и  . При данном построении значение ωt равно нулю, а направление стрелки оси абсцисс слева направо показывает на перемещение синусоидальных кривых фаз А, В, С в указанном направлении. Этим подчеркивается обратное вращение эл. двигателя при прямом чередовании фаз А, В, С. Методика построения векторных диаграмм соответствует методике построения векторной диаграммы для фиг.3.
. При данном построении значение ωt равно нулю, а направление стрелки оси абсцисс слева направо показывает на перемещение синусоидальных кривых фаз А, В, С в указанном направлении. Этим подчеркивается обратное вращение эл. двигателя при прямом чередовании фаз А, В, С. Методика построения векторных диаграмм соответствует методике построения векторной диаграммы для фиг.3.
Вектор тока  будет опережать вектор тока
будет опережать вектор тока  на угол 90°. Таким образом, между потоками Ф1 и Ф2, которые совпадают соответственно с токами
на угол 90°. Таким образом, между потоками Ф1 и Ф2, которые совпадают соответственно с токами  и
и  , угол β будет также равен 90°.
, угол β будет также равен 90°.
На фиг.3 и 6 токи 
 приняты приблизительно равными 0,5
приняты приблизительно равными 0,5  .
.
В действительности, в зависимости от величины сетевого напряжения [2, п.5.4], марки стали и толщины листа отношение указанных токов имеют различные значения.
Например, при увеличении напряжения или уменьшения толщины стали, или замены стали Э41 на Э43 отношение тока  току
току  будет увеличиваться.
будет увеличиваться.
При малых значениях напряжения, например 0,1Uн, ток  будет приблизительно равен току
будет приблизительно равен току  и вектор их геометрической суммы также приблизительно равен 45°. В действительности, ток
и вектор их геометрической суммы также приблизительно равен 45°. В действительности, ток  всегда больше тока
всегда больше тока  , а угол между этими токами всегда больше 45°. Причем, чем больше прилагаемое напряжение, тем больше разница и угол между этими токами.
, а угол между этими токами всегда больше 45°. Причем, чем больше прилагаемое напряжение, тем больше разница и угол между этими токами.
Следовательно, изменение этих параметров влияет на величину вращающего момента двигателя.
Согласно [2, п.10. 2.2] третьи и пятые гармоники, имея обратное вращение, тормозят электрические двигатели.
При работе двигателя с напряжением в электрической сети:
- менее номинального значения эти гармоники отсутствуют;
- более номинального, но менее максимального значения возникают токи третьей гармоники, имеющие малое значение;
- более максимальной величины по мере увеличения напряжения происходит повышение значения тока нечетных гармоник.
При напряжении в питающей сети, менее или равном его номинальному значению, вращающий момент электродвигателя прямо пропорционален напряжению, а при напряжении более его максимального значения - прямо пропорционален квадрату напряжения.
Поэтому нарушается равенство вращающего и тормозного моментов и происходит ускорение вращения ротора до значения, значительно превышающего номинальную скорость вращения приводного механизма. Это может вызвать не только нарушение технологического процесса, но и разнести (разрушить) установку, приводимую двигателем в движение. Однако этого не происходит из-за одновременного повышения напряжений третьей и пятой гармоник. Причем при постепенном увеличении сетевого напряжения сначала повышается напряжение третьей гармоники, а в дальнейшем происходит последовательное увеличение напряжения пятой, седьмой и других нечетных гармоник.
Таким образом, происходит торможение электродвигателей и устраняются вышеуказанные неблагоприятные последствия резкого увеличения скорости их вращения.
Сравнивая фиг.3 и 6, можно заключить, что вращение ротора всегда будет происходить в сторону меньшего магнитного потока относительно большего магнитного потока. Это хорошо согласуется с созданием вращающего момента диска индукционного реле с короткозамкнутыми витками на одной части полюса электромагнита [3, п.2-18].
На закороченной части магнитопровода проходит поток, равный геометрической сумме первичного потока и размагничивающего потока, создаваемого током короткозамкнутых витков. Этот суммарный поток будет отставать на угол, несколько меньший, чем 90°, а его значение будет в несколько раз меньше относительно магнитного потока, проходящего в незакороченной части магнитопровода.
В этом случае вращающий момент определяется по выражению МВР=k·Ф1·Ф2·sinβ и вращение диска происходит в сторону закороченной части магнитопровода, где магнитный поток также имеет меньшее значение, чем поток в незакороченной части магнитопровода.
Проведенный анализ изменения направления вращения ротора электродвигателя при опережении и отставании меньшего потока относительно большего по значению потока позволяет сделать заключение о том, что при равенстве потоков Ф1 и Ф2 и угле β, не равном нулю, вращающий момент будет равен нулю.
Из этого следует вывод об исключении участия токов нагрузки в создании вращающего момента при симметричном напряжении, а при несимметричном напряжении, как указывается в электротехнической литературе, возникает противодействующий вращающий момент. Кроме того, при увеличении тока нагрузки напряжение на выводах статорной обмотки уменьшается. Следовательно, вращающий момент также уменьшается, а не возрастает, как это представлено в технической литературе [1].
Дополнительным примером отсутствия движения при равенстве потоков можно привести и при объяснении возникновения подъемной силы самолета, которой является разность давлений на верхней и нижней плоскостях крыла при несимметричном обтекании его потоком встречного воздуха.
При идентичной конфигурации плоскостей верхней и нижней частей крыла разность давления потоков воздуха будет равна нулю и подъемная сила отсутствует. В этом случае происходит симметричное обтекание крыла потока встречного воздуха.
Новый принцип работы электродвигателя с короткозамкнутым ротором позволяет в полной мере объяснить эффективность использования зануления нейтрали его обмоток, соединенных в звезду при обрыве одной из фаз питающей электрической сети.
На фиг.7 представлена схема распределения токов, а на фиг.8 - векторная диаграмма напряжений соединенных в звезду обмоток генератора и электродвигателя при обрыве фазы А и наличии нулевого провода. В этом режиме напряжения фаз В и С близки по значению к фазному напряжению и угол сдвига фаз между векторами этих фаз несколько больше 120°. Поэтому сохраняются вращающие моменты этих фаз. Следовательно, суммарный вращающий момент будет приблизительно равен 2/3 части полнофазного МВР.
На фиг.9 представлена схема распределения токов; на фиг.10 - векторная диаграмма напряжений соединенных в звезду обмоток генератора и электродвигателя при обрыве фазы А и отсутствии нулевого провода.
Это вызовет смещение нейтрали [4, стр. 22] из своего положения в геометрическом центре треугольника из точки 0 в точку 0’. Вследствие этого потоки, возникающие при приложении к обмоткам двигателя напряжений U’B и U’C из-за противоположного направления соответствующих им потоков  , будут взаимно компенсироваться, что определит исчезновение вращающего момента.
, будут взаимно компенсироваться, что определит исчезновение вращающего момента.
В случае отсутствия зануления нейтрали обмоток при обрыве фаз пуск двигателя не происходит даже в режиме холостого хода. В то же время при зануленой нейтрали двигатель легко запускается.
Проведенные испытания в действующих условиях подтвердили проведенный выше анализ. При этом следует сказать, что при анализе не учитывался электромагнитный момент, который будет рассмотрен во второй части книги [2]. Увеличение этого момента также происходит при занулении нейтрали обмоток двигателя.
Таким образом, зануление нейтрали при обрыве фазы обеспечивает работу двигателя с большей нагрузкой, чем при отсутствии зануления, когда вращающий момент осуществляется за счет электромагнитного момента.
Зануление нейтрали двигателя тесно связано с обеспечением бесперебойности и надежности технологического процесса. Однако это зануление при проектировании и эксплуатации не выполняется.
Прекращение вращения двигателя без зануления нейтрали его обмоток при обрыве фазы обусловливает снижение напряжения в питающей сети из-за возникновения в этом режиме токов короткого замыкания в обмотках остановившегося двигателя вследствие снижения его индуктивного сопротивления до нулевого значения. При этом не исключается прецедент остановки других двигателей, работающих в полнофазном режиме [4, стр. 184].
Источники информации
1. Пантюшин B.C. Электротехника. М.-Л.: Госэнергоиздат, 1960 г.
2. Степанов Ю.А., Степанов Д.Ю. Повышение надежности работы электрооборудования на основе совершенствования теоретического материала. - Самара: Изд-во “Самарский университет”, 2002 г.
3. Федосеев А.М. Основы релейной защиты. М.-Л.: Госэнергоиздат, 1961 г.
4. Степанов Ю.А., Степанов Д.Ю. Оптимизация измерительного комплекса учета электрической энергии и релейной защиты. - М.: Энергоатомиздат, 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТИХОХОДНЫЙ АСИНХРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ | 2009 |
|
RU2402141C1 |
| ОДНОФАЗНЫЙ КОЛЛЕКТОРНЫЙ СЕРИЕСНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1937 |
|
SU53442A1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАБОТЫ АСИНХРОННОЙ КОРОТКОЗАМКНУТОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ И АСИНХРОННАЯ КОРОТКОЗАМКНУТАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2393613C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ И НАДЕЖНОСТИ РАБОТЫ СИНХРОННЫХ ГЕНЕРАТОРОВ В ЭНЕРГОСИСТЕМАХ БОЛЬШОЙ МОЩНОСТИ | 2006 |
|
RU2345469C2 |
| Асинхронная машина | 2024 |
|
RU2833017C1 |
| ОДНОФАЗНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2130680C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ | 2008 |
|
RU2371831C1 |
| Компенсированный однофазный сериесный коллекторный двигатель | 1938 |
|
SU58816A1 |
| НИЗКООБОРОТНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2003 |
|
RU2283527C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |







Изобретение относится к электротехнике и может быть использовано при создании и эксплуатации электродвигателей с короткозамкнутыми роторами. Способ заключается в том, что вращающий момент электродвигателя с короткозамкнутым ротором определяется соотношением MBP=k·Ф1·Ф2·sinβ, где МВР - вращающий момент, Ф1 и Ф2 - потоки в магнитопроводе, порождаемые переменным током в статорной, k - коэффициент пропорциональности и β - угол в электрических градусах между потоками. Устанавливается, что вращение ротора происходит в сторону меньшего потока относительно большего потока с учетом значения угла β в пределах от 0 до 180°. Технический результат заключается в повышении КПД электродвигателей с короткозамкнутым ротором. 10 ил.

Способ для определения вращающего момента электродвигателя с короткозамкнутым ротором, отличающийся тем, что вращающий момент электродвигателя с короткозамкнутым ротором определяется соотношением
Мвр=k·Ф1·Ф2·sinβ,
где Ф1 и Ф2 - потоки в магнитопроводе, порождаемые переменным током в статорной обмотке электродвигателя;
k - коэффициент пропорциональности;
β - угол в электрических градусах между этими потоками, причем поток Ф1 для каждой из трех фаз электрической сети формируют током, равным геометрической сумме двух токов, векторы которых совпадают с векторами первых двух напряжений прямого чередования фаз АВС, ВСА, CAB, a поток Ф2 для каждой фазы формируется током, вектор которого опережает на 90° вектор третьего по порядку напряжения прямого чередования фаз, и при наличии потоков Ф1 и Ф2 происходит вращение ротора в сторону меньшего потока относительно большего потока с учетом угла β в пределах 0 - 180°
| СТЕПАНОВ Ю.А., СТЕПАНОВ Д.Ю | |||
| Повышение надежности работы электрооборудования на основе совершенствования теоретического материала | |||
| - Самара: Издательство "Самарский университет", 2002 | |||
| ПАНТЮШИН B.C | |||
| Электротехника | |||
| - М.-Л.: Госэнергоиздат, 1960, ФЕДОСЕЕВ А.М | |||
| Основы релейной защиты | |||
| - М.-Л.: Госэнергоиздат, 1961 | |||
| Способ косвенного определения механической характеристики асинхронного электродвигателя | 1984 |
|
SU1246029A1 |

