Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, построенным на основе асинхронных электродвигателей, и может быть использовано в прецизионных быстродействующих электроприводах, например в электроприводах, устанавливаемых в механизмах подвижных грузоподъемных кранов, в запорной арматуре трубопроводного транспорта, в современных металлорежущих станках с ЧПУ.
Известен асинхронный электропривод с обратной связью по угловой скорости ротора [1] (стр.51, рис.3.8.), в котором для регулирования скорости электродвигателя принят частотно-токовый векторный способ управления с косвенной ориентацией по полю электродвигателя. Электропривод состоит из связанных между собой силового инвертора на транзисторных модулях, датчиков фазных токов, асинхронного электродвигателя, датчика скорости (тахогенератора), пропорционально-интегрального (ПИ) регулятора скорости, преобразователя системы координат (из двухфазной вращающейся в трехфазную неподвижную), формирователя синусоидальных сигналов, релейных регуляторов токов в фазах электродвигателя. Система управления известного электропривода имеет упрощенную функциональную схему, что затрудняет обеспечение в электроприводе широкого диапазона регулирования частоты вращения и момента.
Учитывая, что в известной структуре системы регулирования частоты вращения ротора асинхронного электродвигателя не реализованы контуры составляющих тока, регулирующие момент и потокосцепление электродвигателя, с соответствующими ПИ-регуляторами, то отсутствует практическая возможность точного регулирования момента и скорости электропривода. Это не позволяет оптимизировать энергетические характеристики электропривода и не обеспечивает надежную работу преобразователя. Синусоидальная форма фазных токов получена с помощью широтно-импульсного модулятора (ШИМ). Организация ШИМ в контурах фазы статора состоит в том, что этот контур переводится в режим генерации за счет введения в него компараторов с гистерезисной характеристикой. Частота и амплитуда колебаний определяются параметрами статорной цепи электродвигателя. Учитывая, что входной сигнал имеет переменную частоту и амплитуду, колебания релейного контура также имеют переменную амплитуду и частоту, причем при переходе управления через ноль возможно пропадание колебаний, и как следствие бросок тока фазы, достигающий значений нескольких порядков от значения номинального тока. Последнее обстоятельство является причиной нагрева транзисторов преобразователя и их выхода из строя.
Наиболее близким к предлагаемому изобретению является регулируемый асинхронный электропривод [1] (стр.51, рис.3.9.), который выбран в качестве прототипа. В состав данного электропривода входят силовой инвертор, датчики фазных токов, асинхронный электродвигатель, датчик скорости ротора электродвигателя, ПИ-регуляторы скорости вращения, токовой и моментной составляющих тока статора, координатных преобразователей из вращающейся системы в неподвижную и из неподвижной во вращающуюся, формирователь синусоидальных сигналов, обеспечивающий подстройку системы координат и тока по потокосцеплению ротора. Известная система позволяет разделить токовую и моментную составляющие токов, обеспечить раздельное управление моментом и потоком асинхронного электродвигателя, тем не менее, в ней не обеспечивается точная ориентация системы координат в различных режимах работы, в процессе функционирования электропривода проявляется взаимовлияние работы каналов регулирования токов и скорости, и как следствие, не обеспечивается требуемое качество регулирования момента в переходных и динамических режимах, не исключены броски тока в переходных режимах работы. При этом динамические и статические характеристики электропривода падают [2].
Настоящее изобретение решает задачу повышения надежности работы преобразователя электропривода и точности управления моментом асинхронного электродвигателя путем обеспечения высокого быстродействия и качества переходного процесса согласования заданного и истинного угловых положений результирующего вектора тока статора.
Решение поставленной задачи достигается тем, что в частотно-регулируемый асинхронный электропривод, содержащий силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертором напряжения, управляющие входы которого соединены с выходами блока векторной широтно-импульсной модуляцией (ШИМ), асинхронный электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, подключенный к первому входу регулятора частоты вращения, ко второму ходу которого подключен выход датчика скорости вращения ротора, задатчик потокосцепления электродвигателя, подключенный через масштабный усилитель к первому входу регулятора реактивного тока, выход которого подключен к первому входу координатного преобразователя напряжений, ко второму входу которого подключен регулятор активного тока, выходы координатного преобразователя напряжений подключены ко входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и к первым входом регулятора активного тока, введены блок деления и наблюдательный блок состояния электропривода. При этом наблюдательный блок состояния снабжен первым и вторым масштабными усилителями, апериодическим звеном, делителем, интегратором и сумматором. Выход первого масштабного усилителя подключен к первому входу делителя, выход которого через интегратор подключен к первому входу сумматора, ко второму входу которого подключен выход второго масштабного усилителя. Выход сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и ко входу координатного преобразователя напряжений. Выход апериодического звена соединен со вторым входом делителя и первым входом блок деления, ко второму входу которого подключен выход регулятора частоты вращения. Выход блока деления подключен ко второму входу регулятора активного тока и к входу первого масштабного усилителя. Кроме того, датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика перемещений с двумя выходами, первым выходом которого является угловое положение ротора электродвигателя, а вторым выходом - его скорость. Причем первый выход импульсного датчика перемещений соединен с входом второго масштабного усилителя, а второй выход - со вторым входом регулятора частоты вращения.
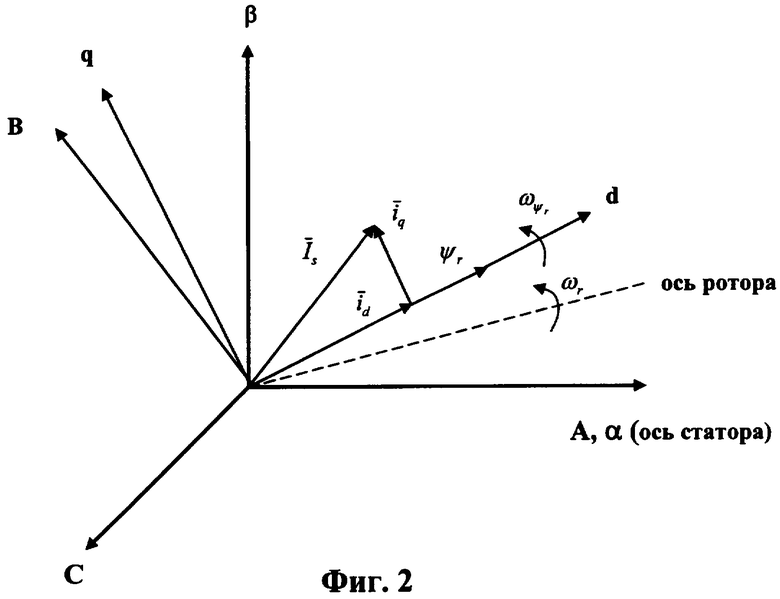
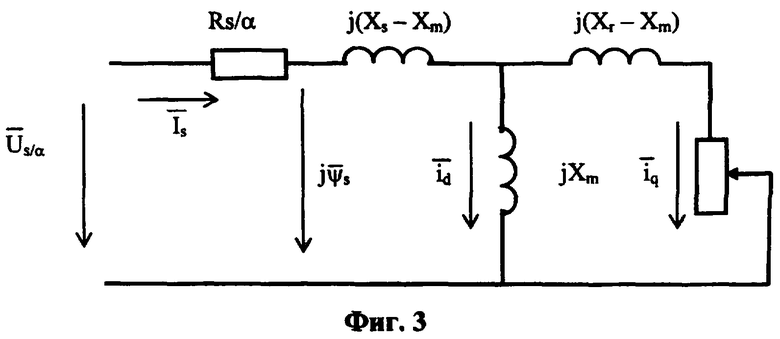
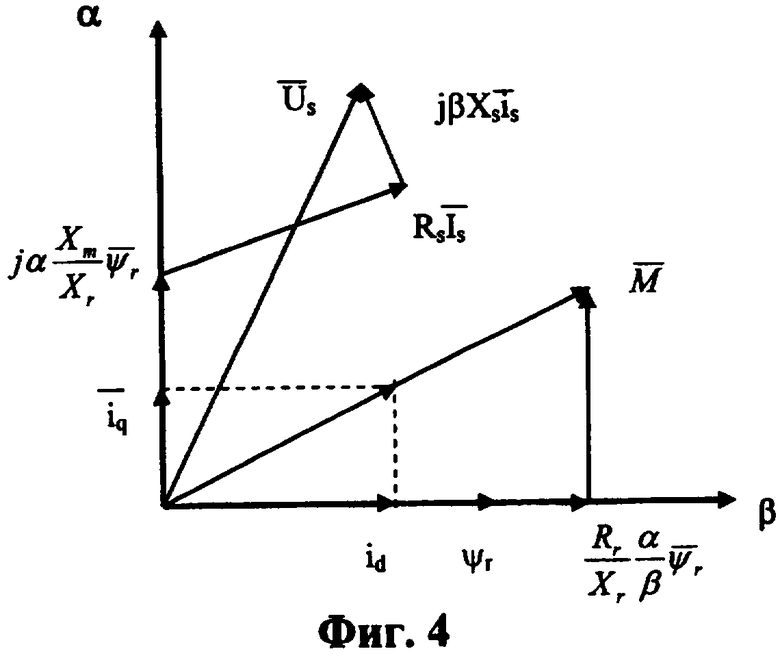
На фиг.1 представлена функциональная схема частотно-регулируемого электропривода; на фиг.2 - векторная диаграмма, поясняющая принцип ориентации системы координат по вектору потокосцепления ротора; на фиг.3 - схема замещения асинхронного электродвигателя; на фиг.4 векторная диаграмма, поясняющая принцип работы асинхронного электродвигателя.
Частотно-регулируемый асинхронный электропривод содержит силовой блок 1 с входящими в него последовательно соединенными выпрямителем напряжения сети 2, сглаживающим фильтром 3 с датчиком напряжения 4, инвертором напряжения 5. Управляющие входы инвертора напряжения 5 соединены с выходами блока векторной широтно-импульсной модуляции (ШИМ) 6. К выходу инвертора напряжения 5 через блок датчиков фазных токов 7 подключены обмотки асинхронного электродвигателя 8, выходной вал которого подключен к передаточному механизму 9 и импульсному датчику перемещений 10 с двумя выходами. Первым выходом 11 датчика перемещений 10 является угловое положение ротора электродвигателя, а вторым выходом 12 - его скорость.
Задатчик потокосцепления электродвигателя 13, через масштабный усилитель 14 подключен к первому входу регулятора реактивного тока 15, выход которого подключен к первому входу координатного преобразователя напряжений 16.
Задатчик текущей угловой скорости электродвигателя 17 подключен к первому входу регулятора частоты вращения 18, ко второму ходу которого подключен второй выход 12 импульсного датчика перемещений 10. Выход регулятора частоты вращения 18 подключен ко второму входу блока деления 19, выход которого подключен к первому входу регулятора активного тока 20. Выход регулятора активного тока 20 подключен ко второму входу координатного преобразователя напряжений 16, выходы которого подключены ко входам блока векторной ШИМ 6.
Выходы блока датчиков фазных токов 7 подключены ко входам координатного преобразователя токов 21, выходы которого подключены - ко второму входу регулятора реактивного тока 20 и ко второму входу регулятора активного тока 15.
Электропривод снабжен также наблюдательным блоком состояния электропривода 22. Наблюдательный блок состояния 22 снабжен первым 23 и вторым 24 масштабными усилителями, апериодическим звеном 25, делителем 26, интегратором 27 и сумматором 28. Вход первого масштабного усилителя 23 подключен к выходу блока деления 19, а его выход подключен к первому входу делителя 26, выход которого через интегратор 27 подключен к первому входу сумматора 28, ко второму входу которого подключен выход второго масштабного усилителя 24, вход которого подключен к первому выходу 11 датчика перемещений 10.
Выход сумматора 28 подключен к одному из входов блока векторной ШИМ 6, к входу координатного преобразователя токов 21 и к входу координатного преобразователя напряжений 16.
Выход апериодического звена 25 подключен ко второму входу делителя 26 и первому входу блока деления 19, а его вход - к выходу масштабного усилителя 14.
Силовой блок 1 обеспечивает преобразование и усиление по мощности сигналов управления, поступающих на управляющие входы автономного инвертора с блока 6 векторной ШИМ, управление затворами силовых транзисторов (не показаны), формирование защит и гальваническую развязку силовых и управляющих цепей.
Датчиковая система электропривода формирует нормированные сигналы обратных связей с гальванической развязкой измерительных и выходных цепей. Она включает: датчик напряжения 4, состоящий из резистивного делителя и изолирующего усилителя с оптронной развязкой, установленный в звене постоянного напряжения после емкостного сглаживающего фильтра 3, блока датчиков тока 7 компенсационного типа, установленных в выходных фазах инвертора напряжения 5 [2] и датчик угловых перемещений 10, установленный в передаточном механизме 9 или на исполнительном электродвигателе 8 с подключенным вычислителем, рассчитывающим скорость и угловое положение ротора асинхронного электродвигателя. При установке датчика угловых перемещений 10 в передаточном механизме 9, передаточное число кинематической цепи от вала электродвигателя 8 до датчика угловых перемещений 10 должно быть целочисленной величиной и иметь значение или 1 или 2, что определяется допустимой максимальной скоростью вращения импульсного датчика и особенностями обработки выходного импульсного сигнала датчика [3].
В преобразователе угловых перемещений импульсного датчика перемещений 10 вырабатываются прямоугольные измерительные импульсы А и В, сдвинутые относительно друг друга на 90 градусов, частота следования которых определяется скоростью вращения электродвигателя, а фазовый сдвиг сигнала А относительно сигнала В (либо +90 град, либо -90 град) определяет направление вращения электродвигателя. Короткий импульс R определяет нулевое положение импульсного датчика перемещений 10. В вычислителе импульсного датчика перемещений 10, выполненном на базе транзитной логики (ТТЛ), вырабатываются нормированные по напряжению сигналы 0-5 В для последующей обработки и выработки сигналов, пропорциональных углу поворота или скорости ротора электродвигателя [3].
Электропривод работает следующим образом.
Частотно-регулируемый электропривод построен на базе короткозамкнутого асинхронного электродвигателя (АКЗД) и обеспечивает широкий диапазон регулирования скорости. В основу построения базовой структуры системы управления положен принцип пространственно-векторного формирования алгоритма управления [4] и принцип векторной ориентации переменных друг относительно друга в установившихся и переходных режимах работы электропривода. Первый обеспечивает улучшенный гармонический состав выходного напряжения преобразователя и повышенные энергетические характеристики электропривода; второй - хорошие регулировочные характеристики электропривода за счет раздельного управления электромагнитным моментом и потокосцеплением [5].
Для обеспечения современных требований по надежности и эксплуатационным свойствам в электроприводе использован один тип встраиваемых в конструкцию преобразователя электротехнических датчиков, все остальные функции управления реализованы с помощью электронных устройств. Структура системы управления использует частотно-токовое векторное управления. Данный метод управления обеспечивает наилучшие линейные механические характеристики и базируется на принципах ориентации системы координат по вектору потокосцепления ротора и для получения широкого диапазона регулирования скорости вращения выходного вала реализуется закон поддержания постоянства потокосцепления ротора [6].
Для анализа физических процессов работы АКЗД при частотном регулировании на фиг.2 представлена векторная диаграмма, поясняющая принцип ориентации электромагнитных переменных электродвигателя по вектору потокосцепления ротора, на фиг.3 схема замещения фазы асинхронного электродвигателя и векторная диаграмма, построенная по уравнениям (1) во вращающейся системе координат d, q [7].
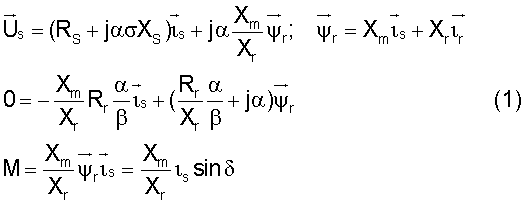
где δ - угол между вектором потокосцепления  и током
и током 
σ=1-Xm 2/XsXr - коэффициент рассеяния;



 - результирующие векторы электромагнитных переменных;
- результирующие векторы электромагнитных переменных;
Rs, Rr, Xs, Xr, Xm - активные сопротивления статора, ротора, индуктивные сопротивления статора, ротора, контура намагничивания - постоянные величины, значения которых находятся из паспортных данных АКЗД;
α, β - относительная частота и абсолютное скольжение электродвигателя;
М - электромагнитный момент.
Из схемы замещения видно, что для поддержания ψr=const напряжение Us (ток is) необходимо менять в функции частоты α и абсолютного скольжения β. Для пояснения физической сущности управления скоростью АКЗД при поддержании ψr=const обратимся к векторной диаграмме и уравнению момента системы (1). Из векторной диаграммы видно, что величина потокосцепления ротора определяется проекцией результирующего вектора тока статора is на ось d-id, а из уравнения (1) следует, что при ψr=const значение момента определяется проекцией is на ось q-iq. Это можно показать, аналитически совместив вектор ψr с осью d, тогда  is=id+jiq, Us=Ud+jUq (фиг.2) из уравнений (1) получим:
is=id+jiq, Us=Ud+jUq (фиг.2) из уравнений (1) получим:
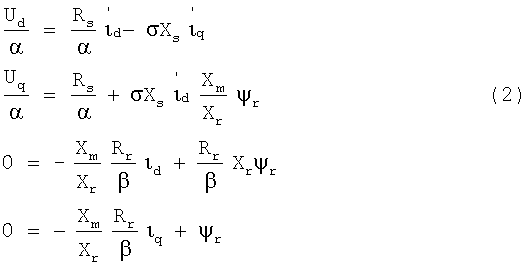
Последние два уравнения системы уравнений (2) подтверждают сделанный вывод.
Таким образом, чтобы поддержать потокосцепление ротора постоянным при изменении управляющего и возмущающего воздействий, необходимо поддерживать id=const, a iq изменять пропорционально абсолютному скольжению. Частота α определяется суммой сигналов, один из которых пропорционален скорости ротора электродвигателя (ωr), а другой пропорциональный абсолютному скольжению β и может сниматься с выхода регулятора скорости 18 или рассчитываться в наблюдательном блоке состояния 22.
Поскольку 
а электромагнитный момент 
то, формируя вещественную часть тока статора по закону id=const, а мнимую часть и скольжение по закону (1), получаем, что при ψr=const М пропорционален Iq, то есть управление током Iq при Id=const эквивалентно управлению моментом электродвигателя. При этом ψr будет оставаться неподвижным в координатных осях, вращающихся с частотой α. Выход регулятора скорости является заданием момента и соответственно тока Iq, а ток Id заданием потокосцепления ротора ψr.
Использование координатных преобразований напряжений и токов, выполняемых блоками 16 и 21, из вращающейся системы координат d-q в неподвижную α-β и из неподвижной во вращающуюся, позволяет разделить токовую Id и моментную Iq составляющую тока статора, обеспечивает раздельное управление моментом М и магнитным состоянием ψr электродвигателя. Принципиальная особенность этого способа состоит в том, что система координат d-q (см. фиг.3) подстраивается так, чтобы ось d совпадала с потокосцеплением ψr.
Эта подстройка обусловлена способом задания электрической частоты α. Погрешности, обусловленные неточной идентификацией параметров ротора или ошибки в измерении фактической скорости электродвигателя ωr, могут приводить к неправильной ориентации системы координат. Учитывая, что величина скольжения β у асинхронных электродвигателей не превышает нескольких процентов, для удержания системы координат так, чтобы ось d совпадала с ψr требуется высокая точность измерения скорости в канале датчика скорости. Фазовый сдвиг между заданием и действительным потоком электродвигателя может привести к нарушению нормальной работы электропривода, выражающейся во взаимосвязи регулятора скорости и регулятора потока. Для исключения взаимосвязи контуров регулирования при векторном частотно-токовом управлении и реализации ориентации системы координат в соответствии с векторной диаграммой фиг.2, определяющей точность и диапазон регулирования скорости АКЗД, на выходной вал исполнительного электродвигателя установлен импульсный датчик перемещения 10.
Импульсный датчик перемещения 10 должен иметь не менее 5000 меток на оборот. Выходные сигналы импульсного датчика перемещения 10 обрабатываются в вычислителе положения и скорости (квадратурном декодере) в процессе преобразования частоты. Идентификация электрического положения ротора производится обычным суммированием количества меток. Идентификация скорости основана на измерении интервалов времени между заданным количеством меток датчика. Для обеспечения максимальной точности измерения количество меток (путевые приращения) автоматически меняются в функции текущей измеряемой скорости. Система измерения гарантирует точность не хуже 0,2% от текущей скорости электродвигателя.
Регулирование скорости электродвигателя осуществляется следующим образом. Сигнал задания скорости вращения с задатчика текущей угловой скорости 17 поступает на вход регулятора частоты вращения 18, на другой вход которого поступает сигнал обратной связи по скорости асинхронного электродвигателя 8 со второго выхода импульсного датчика перемещения 10. Сигнал с выхода регулятора частоты вращения 18, являющийся заданием момента Муз, через блок деления 19 поступает на один из входов регулятора активного тока 20, вырабатывающего сигнал, эквивалентный моменту электродвигателя 8, на другой вход регулятора активного тока 20 поступает сигнал обратной связи с выхода координатного преобразователя токов 21, в котором вычисление токов Id и Iq, пропорциональных моменту и потокосцеплению ротора электродвигателя, производится по выражениям, представленным в источнике информации [2]:

где iα и iβ - составляющие тока в неподвижной системе координат;
ωк - скорость вращения системы координат, вращающейся с полем электродвигателя.
Составляющие тока статора iα, iβ в неподвижной системе координат вычисляются в координатном преобразователе токов 21 по замеренным реально существующим мгновенным значениям трехфазных значений тока статора электродвигателя в соответствии с выражением (6):

Мгновенные значения фазных токов измеряются с помощью электрического датчика тока типа LEM [8] или резистивного датчика.
С выхода регулятора активного тока 20 сигнал, пропорциональный моменту электродвигателя, Uqз поступает на один из входов координатного преобразователя напряжений 16, на другой вход которого поступает сигнал с выхода регулятора реактивного тока 15, пропорциональный потокосцеплению электродвигателя, а на вход регулятора реактивного тока 15 поступает сигнал заданного значения тока Id, полученного путем нормирования сигнала с задатчика потокосцепления электродвигателя 13, нормированный с помощью масштабного усилителя 14. В качестве сигнала обратной связи на другой вход регулятора реактивного тока 15 поступает рассчитанный по формуле (5) сигнал Id, пропорциональный потокосцеплению электродвигателя с другого выхода координатного преобразователя токов 21. Регулятор реактивного тока 15 обеспечивает поддержание тока намагничивания на уровне, задаваемом формирователем закона управления - задатчиком потокосцепления 13. Чтобы устранить статическую ошибку регулирования регуляторы активного 20 и реактивного 15 тока выполнены интегральными.
В координатном преобразователе напряжений 16 осуществляется перевод управления из вращающихся координатных осей d-q к неподвижным α-β по выражению (7):

Сигналы задания Uα, Uβ для расчета фазных напряжений, обеспечивающих требуемые фазные токи статора iа, iв, ic, с выхода координатного преобразователя напряжений 16 поступают на соответствующие входы блока векторной ШИМ 6, где вычисляются проекции векторов эквивалентного напряжения на зажимах статора электродвигателя, представляющие собой усредненные на определенном интервале дискретности от высокочастотных коммутационных пульсаций мгновенные значения фазных напряжений. Блок векторной ШИМ 6 формирует закон модуляции и закон переключения силовых ключей автономного инвертора напряжения, обеспечивающих формирование в фазных обмотках АКЗД напряжения на основе метода пространственно-векторной модуляции [9] в соответствии с заданиями на напряжение, сформированными в координатном преобразователе напряжений 16. Закон переключения силовых ключей обеспечивает минимизацию коммутационных потерь в автономном инверторе напряжений 5 и на электродвигателе 8.
Для формирования этих законов на блок векторной ШИМ 6 с координатного преобразователя напряжений 16 поступают проекции векторов активного напряжения Uq n+1 и напряжения намагничивания Ud n+1 на неподвижную систему координат (α-β), по которым формируются внутренние переменные Λ1 d, Λ2 d, Λ3 d, Λ1 q, Λ2 q, Λ3 q согласно следующим формулам:

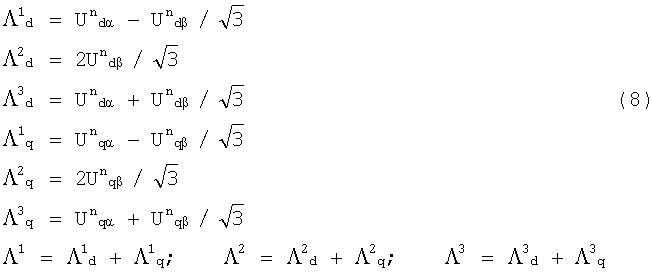
где Λi j - доли времени периода ШИМ, в которые включаются выбранные векторы выходного напряжения блока ШИМ; i - 1, 2, 3; j - d, q;
Udα, Udβ, Uqα, Uqβ - проекции соответствующих заданий по напряжению (активному Uq n и намагничивания Ud n) на неподвижную систему координат α-β.
Подробно работа блока ШИМ 6 описана в [10]. В переходных режимах разгона и торможения блок векторной ШИМ 6 вычисляет мгновенные значения фазных напряжений Ua, Uв, Uс по сигналам управления с координатного преобразователя напряжений 16 и информации о реальной величине входного напряжения инвертора 5, снимаемого с датчика напряжения сглаживающего фильтра 3. В установившихся режимах работы электропривода и в динамических режимах малых отклонений токовых ошибок δid, δiq, управляющие воздействия на зажимах электродвигателя рассчитываются в блоке векторной ШИМ 6 с учетом мгновенного значения частоты вращения заданного тока статора (is) по значениям αψr, подаваемого на блок векторной ШИМ 6 со второго выхода наблюдательного блока состояния электропривода 22, причем сигналы масштабируются таким образом, чтобы уровень выходного сигнала блока векторной ШИМ 6 соответствовал реальным значениям эквивалентных фазных напряжений.
Наблюдательный блок состояния электропривода 22 построен во вращающейся системе координат и восстанавливает переменные, необходимые для реализации алгоритма векторного управления в соответствии с уравнениями роторной цепи электродвигателя, записанными относительно тока статора и потокосцепления ротора во вращающейся системе координат (d-q), ориентированной по вектору потокосцепления ротора:

где  - постоянная роторной цепи;
- постоянная роторной цепи;
Rr, Lr, Lm - активное сопротивление, индуктивности ротора и цепи намагничивания;

 - проекции вектора тока статора на оси d и q;
- проекции вектора тока статора на оси d и q;
ωΨ - частота вращения вектора потокосцепления ротора;
ωs - частота скольжения;
ωr - скорость вращения ротора электродвигателя;
zp - число пар полюсов;
Ψr - потокосцепление ротора.
Отметим, что для восстановления переменных в наблюдательном блоке состояния 22 вместо реальных значений тока статора в осях (d, q) используются их заданные значения, что допустимо при быстродействующих контурах тока, отрабатывающих заданные значения без фазовых и статических ошибок.
К особенностям системы управления частотно-регулируемого электропривода следует отнести наличие трех контуров управления: для регулирования скорости, составляющей тока статора, пропорционального потоку электродвигателя, и составляющей тока статора, определяющей электромагнитный момент. Настройка параметров контуров выполняется на основе методов подчиненного регулирования исходя из желаемого быстродействия по методикам, описанным в [11]. Внутренние контуры токов векторной системы управления являются идеальными повторителями управляющего сигнала, обладают быстрым и точным переходным процессом желаемой формы и нулевой статической ошибкой.
Информация об ориентации системы координат вычисляется с применением адаптивного устройства оценки на базе математических дифференциальных уравнений, описывающих состояние АКЗД в реальном масштабе времени. Вычисление текущего положения потокосцепления ротора производится не по фактическим значениям токов статора, а по их заданным значениям, в то же время задание на контур тока Iq, определяющего момент электродвигателя, вычисляется путем деления сигнала с выхода регулятора частоты вращения 18 на вычисленное значение потокосцепления ψr в наблюдательном блоке состояния 22. Такое вычисление сигнала управления по моменту в сочетании с программным вычислением напряжений управления на электродвигатель и соответственно токов в зависимости от сигнала αψr из наблюдательного блока состояния 22 обеспечивает корректное функционирование электропривода в широком диапазоне скоростей и качественное управление токами преобразователя с исключением бросков тока как в статических, так и динамических режимах работы электропривода.
Все используемые составные части системы управления фиг.1 являются известными либо могут быть получены из известных устройств путем их объединения известными методами. Вопросы применения и построения координатных преобразователей токов 21 и напряжений 16 подробно описаны в [12], регуляторы частоты вращения, токов, при известных требованиях к контуру могут быть построены по требованиям и правилам, изложенным в [13] с реализацией аппаратной части на основе методов, приведенных в [14]. Блок деления 19, сглаживающий фильтр 3, интегратор 27, масштабные усилители 14, 23, 24, апериодическое звено 25, а также сумматор 28 могут быть реализованы на операционных усилителях [15] или цифровых микросхемах. Аппаратная реализация и работа блока векторной ШИМ 6 с диаграммами работы изложена в [10]. Работа импульсного датчика перемещения 10 описана в [3].
Таким образом, введение в частотно-регулируемый асинхронный электропривод импульсного датчика перемещения 10, блока деления 19 и наблюдательного блока состояния электропривода 22, а также использование выходных сигналов наблюдательного блока состояния в конурах обратных связей по моменту и потокосцеплению и вычисление сигналов обратных связей по заданным значениям токов позволяет осуществить компенсацию амплитудных и фазовых ошибок замкнутых контуров регулирования потока и момента АКЗД за счет точной ориентации системы координат и вычисление управляющих воздействий по току (моменту) в зависимости от фактического значения потокосцепления электродвигателя, обеспечивает, в сравнении с известными решениями, более высокие динамические показатели за счет увеличения быстродействия и точности регулирования момента, исключение бросков тока и надежную работу силового блока преобразователя частоты электропривода.
Источники информации
1. Поздеев А.А. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах. - Чебоксары: Из-во Чуваш. ун-та, 1998. - 172 с., стр.51, рис 3.9 - прототип.
2. Глазенко Т.А., Герман-Галкин С.Г., Полищук С.Б., Рыдов В.А. Частотно-регулируемые асинхронные электропривода для станков с ЧПУ. - Л., ЛДНТП, 1988. - 28 с., ил.
3. Преобразователи перемещения. Блоки индикации. Каталог 2001. - С.-Петербург, ОАО СКБ «ИС», 2001. - 125 с.
4. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. - М. - Л., Госэнергоиздат, 1963. - 744 с.
5. Novotny D.W. and Lipo T.A. Introduction to Field Orientation and High Performance AC Drives Second Edition / IEE Industry Applications Society Annual Meeting. 1986. Section 2.
6. Рудаков В.В., Столяров И.М., Дартау В.А. Асинхронные электроприводы с векторным управлением. - Л., Энергоатомиздат, 1987. - 136 с.
7. Эпштейн И.И. Автоматизированный электропривод переменного тока. - М., Энергоатомиздат, 1982. - 120.
8. Датчики - трансформаторы тока и напряжения серии ЛЕМ. Технические условия ТУ 3413-001-00512622-96. - Тверь, OOO «ТВЕЛЕМ». - 1996 - 29 с.
9. Изосимов Д.Б., Рывкин С.Е. Шевцов С.В. Симплексные алгоритмы управления трехфазным автономным инвертором напряжения с ШИМ. - Электротехника, 1993, №12.
10. Изосимов Д.Б., Рывкин С.Е. Широтно-импульсная модуляция трехфазных автономных инверторов. - Электричество, 1997. - №6.
11. Ремшин Б.И., Ямпольский Д.С. Проектирование и наладка систем подчиненного регулирования электроприводов. - М., Энергия, 1975. - 184 с.
12. Элементы системы управления частотным приводом с подчиненным векторным регулированием / Алексеев В.В., Дартау В.А., Рудаков В.В. - Электротехническая промышленность. Серия Электропривод. - М., 1981. вып.4(93).
13. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1973. - 350 с.
14. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М., Энергия, 1978.
15. Титце У., Шенк К. Полупроводниковая схемотехника. - М.: Мир, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
| Электропривод переменного тока | 1979 |
|
SU928584A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
Изобретение относится к электротехнике и может быть использовано в электроприводах различного отраслевого применения, построенных на основе асинхронного короткозамкнутого двигателя. Техническим результатом является улучшение динамических показателей (точность, время регулирования), повышение надежности работы преобразователя электропривода за счет увеличения быстродействия и повышения точности регулирования момента и исключения выбросов тока в переходных режимах разгона и торможения скорости асинхронного двигателя. В частотно-регулируемом электроприводе датчик скорости вращения выполнен в виде импульсного датчика с дополнительным выходом угловых перемещений, установленного в исполнительном электродвигателе либо в передаточном механизме. В электропривод введены наблюдательный блок состояния привода, вычисляющий текущее угловое положение потокосцепления по заданным значениям токов статора, и блока деления, регулирующего значение активного тока, пропорционального моменту двигателя, по фактическому значению потокосцепления ротора двигателя. Благодаря такому построению системы управления в динамических режимах осуществляется компенсация амплитудных и фазных ошибок замкнутых контуров тока за счет точной ориентации системы координат по вектору потокосцепления ротора, определяемой значением вычисленного угла αψr, и обеспечение уровня напряжения на двигателе соответствующего реальным значениям эквивалентных фазных напряжений. Данная схема управления обеспечивает корректное функционирование электропривода в широком диапазоне регулирования скоростей. При этом улучшаются условия работы двигателя и механизма в целом благодаря исключению динамических ударов пусковых перегрузок и ограничению тока в обмотках двигателя. Экономится энергия, увеличивается срок службы оборудования. 4 ил.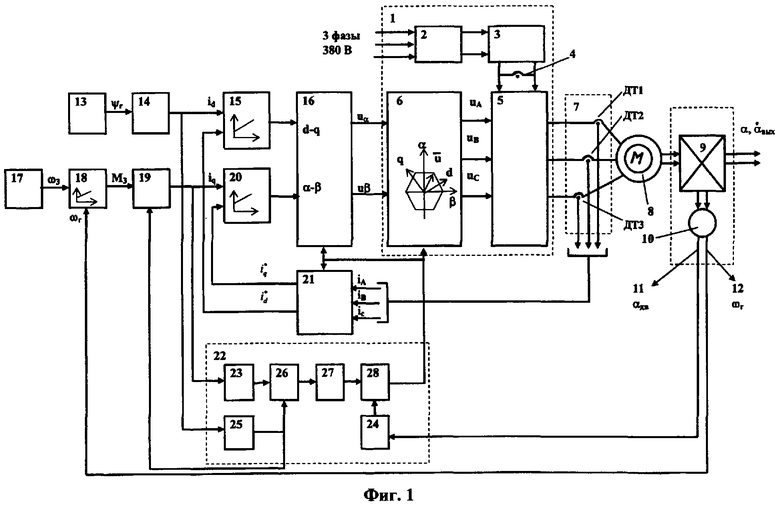
Частотно-регулируемый асинхронный электропривод, содержащий силовой блок с входящими в него последовательно соединенными выпрямителем напряжения сети, сглаживающим фильтром с датчиком напряжения, инвертор напряжения, управляющие входы которого соединены с выходами блока векторной ШИМ, электродвигатель, обмотки которого подключены через блок датчиков фазных токов к выходу инвертора напряжения, а выходной вал к датчику скорости вращения его ротора и к передаточному механизму, задатчик текущей угловой скорости электродвигателя, подключенный к первому входу регулятора частоты вращения, ко второму входу которого подключен выход датчика скорости вращения ротора, задатчик потокосцепления электродвигателя, подключенный через масштабный усилитель к первому входу регулятора реактивного тока, выход которого подключен к первому входу координатного преобразователя напряжений, ко второму входу которого подключен регулятор активного тока, выходы координатного преобразователя напряжений подключены ко входам блока векторной ШИМ, координатный преобразователь токов, соединенный входами к выходам блока датчиков фазных токов, а выходами со вторым входом регулятора реактивного тока и с первым входом регулятора активного тока, отличающийся тем, что в него введены блок деления и наблюдательный блок состояния электропривода, снабженный первым и вторым масштабными усилителями, апериодическим звеном, делителем, интегратором и сумматором, при этом выход первого масштабного усилителя подключен к первому входу делителя, выход которого через интегратор подключен к первому входу сумматора, ко второму входу которого подключен выход второго масштабного усилителя, выход сумматора подключен к одному из входов блока векторной ШИМ, к входу координатного преобразователя токов и к входу координатного преобразователя напряжений, выход апериодического звена соединен со вторым входом делителя и первым входом блока деления, ко второму входу которого подключен выход регулятора частоты вращения, выход блока деления подключен ко второму входу регулятора активного тока и ко входу первого масштабного усилителя, а датчик скорости вращения ротора электродвигателя выполнен в виде импульсного датчика с двумя выходами, первый из которых является выходом углового положения ротора электродвигателя, а второй - выходом скорости вращения ротора электродвигателя, при этом первый выход импульсного датчика соединен с входом второго масштабного усилителя.
| ПОЗДЕЕВ А.А | |||
| Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных приводах | |||
| - Чебоксары: Чувашский университет, 1998, с.52 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ АСИНХРОННОГО ДВИГАТЕЛЯ В РЕГУЛИРУЕМОМ ЭЛЕКТРОПРИВОДЕ | 2000 |
|
RU2184417C1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
| ТРЕХФАЗНЫЙ НЕПОСРЕДСТВЕННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2002 |
|
RU2231203C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| СПОСОБ ВВОДА КООРДИНАТ КУРСОРА | 1997 |
|
RU2151420C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6653804 B1, 25.11.2003 | |||
| ПОЛИ(МЕТ)АКРИЛАТНЫЕ СОПОЛИМЕРЫ С РАЗВЕТВЛЕННЫМИ С17 АЛКИЛЬНЫМИ ЦЕПЯМИ И ИХ ПРИМЕНЕНИЕ В КОМПОЗИЦИЯХ СМАЗОЧНОГО МАСЛА | 2017 |
|
RU2729517C2 |
| Ю. М. Ламанов, Н. М. Андреев, В. Н. Терехин, В. И. Лацкий,изобретения П. А. Корляков, | 0 |
|
SU218729A1 |
| WO 9842070 A1, 24.09.1998. | |||

