Изобретение относится к устройствам, обеспечивающим защиту прецизионных устройств от внешних силовых воздействий, таких как вибрации, толчки и т.д. Оно может быть использовано для виброзащиты сканирующих зондовых микроскопов.
Известен механизм стабилизации, содержащий пружинно-рычажную систему подвеса платформы [1].
Недостаток указанного устройства заключается в том, что при достаточной сложности устройства обеспечивается низкая эффективность гасителя колебаний, связанная с механическим контактом подвижных и неподвижных частей.
Известен также магнитный демпфер, содержащий основание, первый подвес с упругими элементами, закрепленный на основании и сопряженный с первой подвижной платформой, а также второй подвес с упругими элементами, закрепленный на первой подвижной платформе и сопряженный со второй подвижной платформой. При этом на основании закреплены первые проводящие пластины, сопряженные с магнитами, установленными на первой подвижной платформе, содержащей при этом вторые проводящие пластины, сопряженные со вторыми магнитами, закрепленными на второй подвижной платформе [2].
Это устройство выбрано в качестве прототипа предложенного решения.
Первый недостаток указанного устройства заключается в том, что магниты расположены напротив друг друга на подвижном и неподвижном элементах. Это приводит к усложнению наладки устройства, связанной с силовым взаимодействием между магнитами. Трудность настройки, соответственно, может привести к недостаточной эффективности работы демпфера.
Второй недостаток заключается в отсутствии механической системы самоустановки подвижной платформы, что также усложняет наладку устройства и снижает эффективность демпфирования.
Задачей изобретения является повышение эффективности работы демпфера.
Указанная задача достигается тем, что в магнитном демпфере, содержащим основание, подвесы, закрепленные на основании, содержащие виброгасители, в состав которых входят упругие элементы растяжения, соединенные с подвижной платформой, а также магниты, расположенные по замкнутой линии, и проводящий гаситель колебаний, установленный с возможностью взаимодействия с магнитными потоками, образованными магнитами, продольные оси упругих элементов растяжения расположены под углом к оси линейных колебаний подвижной платформы, проводящий гаситель колебаний закреплен на подвижной платформе, магниты закреплены на основании парами с зазорами между магнитами таким образом, что разноименные полюса расположены на внешних поверхностях пар.
Существует вариант, в котором на магнитах сформировано полимерное покрытие.
Возможно закрепление на основании упоров и привода, сопряженных с подвижной платформой.
Существует также вариант, где упругие элементы растяжения расположены попарно и под углом друг к другу.
Целесообразно использовать варианты, в которых в первом - внешние поверхности магнитов в парах соединены магнитопроводом, во втором - каждые рядом расположенные внешние поверхности соседних пар магнитов имеют разноименные полюса, а в третьем - одноименные.
Существует несколько вариантов, в которых проводящий гаситель состоит из проводящих пластин, проводящие пластины имеют размеры плоскостей, превышающие аналогичные размеры магнитов, первые проводящие пластины расположены в зазорах между магнитами таким образом, что их плоскости перпендикулярны магнитным потокам, дополнительные проводящие пластины расположены между магнитами парами.
Кроме этого, существуют варианты, где проводящий гаситель состоит из замкнутого контура, замкнутого контура, выполненного в виде первого соленоида, подключенного к источнику тока, а также в виде второго и третьего соленоидов, один из которых подключен к анализатору тока, а другой - к усилителю тока, причем анализатор тока соединен со входом усилителя тока.
На фиг.1 изображен магнитный демпфер, вид сбоку.
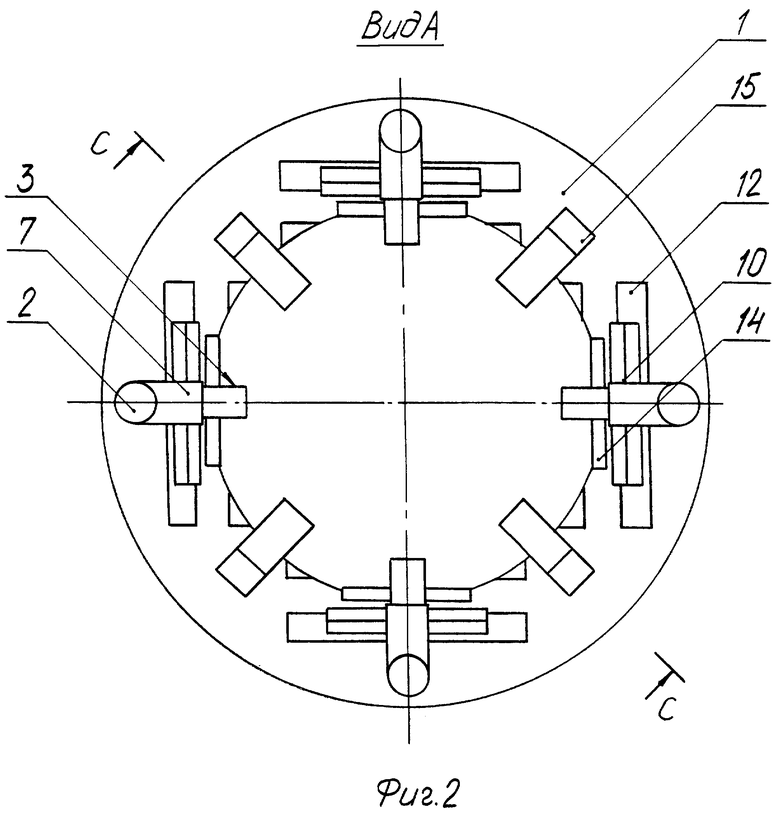
На фиг.2 - то же, вид сверху.
На фиг.3 изображен фиксатор магнитного демпфера.
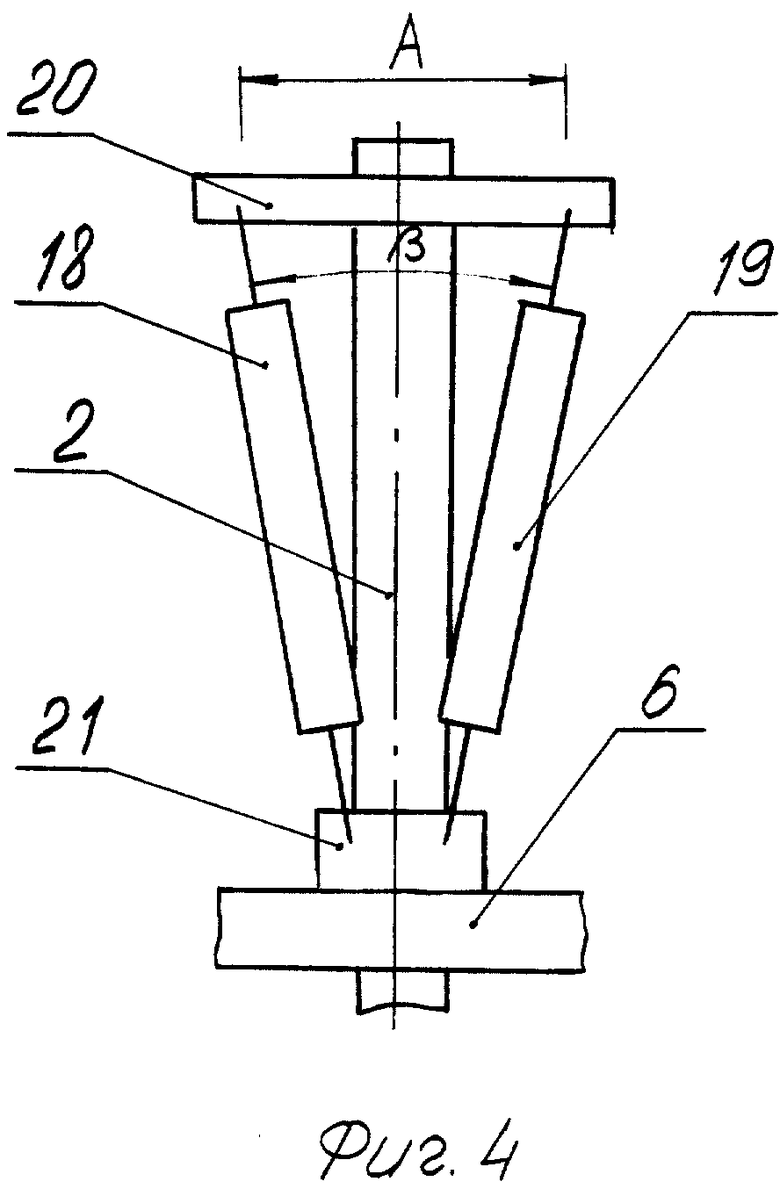
На фиг.4 представлен первый вариант расположения упругих элементов.
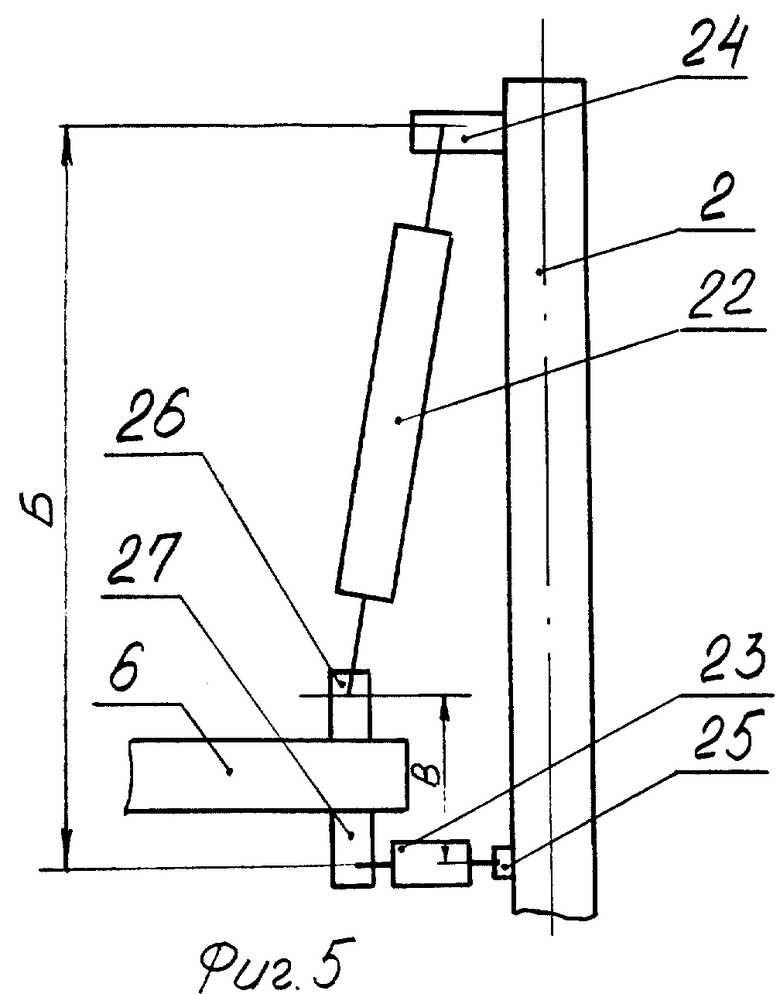
На фиг.5 - второй вариант расположения упругих элементов.
На фиг.6 представлен первый вариант расположения проводящих пластин в магнитных зазорах.
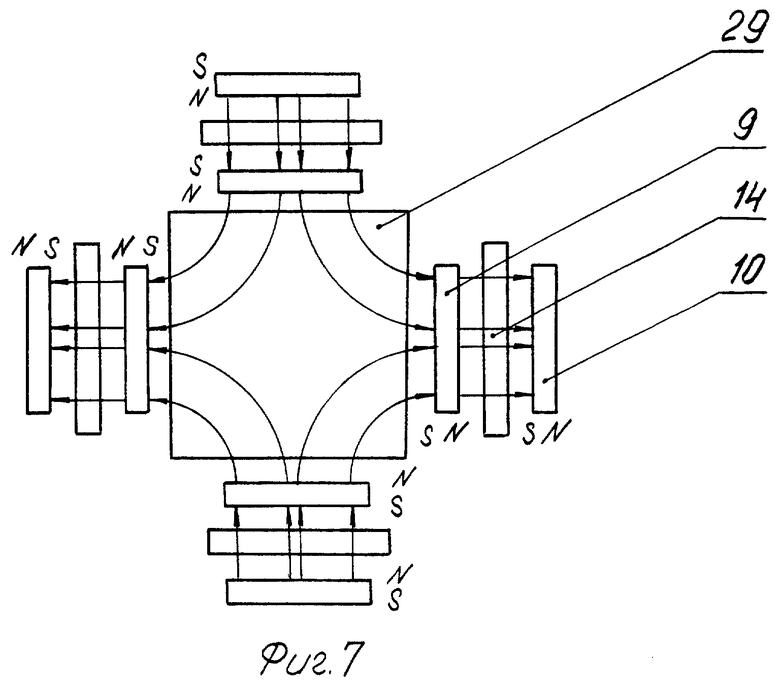
На фиг.7 - вариант выполнения гасителя.
На фиг.8 - второй вариант расположения проводящих пластин при центрально-симметричном расположении магнитных пар.
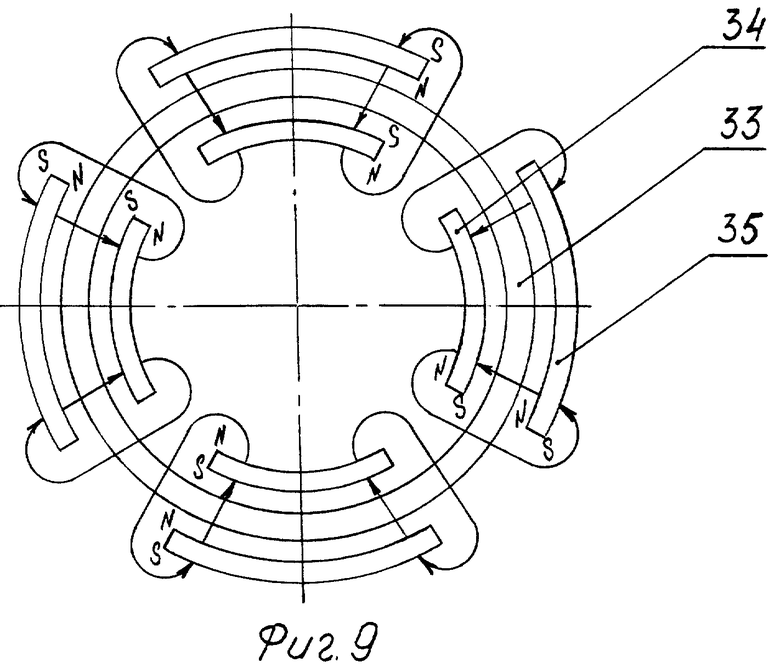
На фиг.9 изображен проводящий гаситель в виде замкнутого контура.
На фиг.10 - в виде одного соленоида.
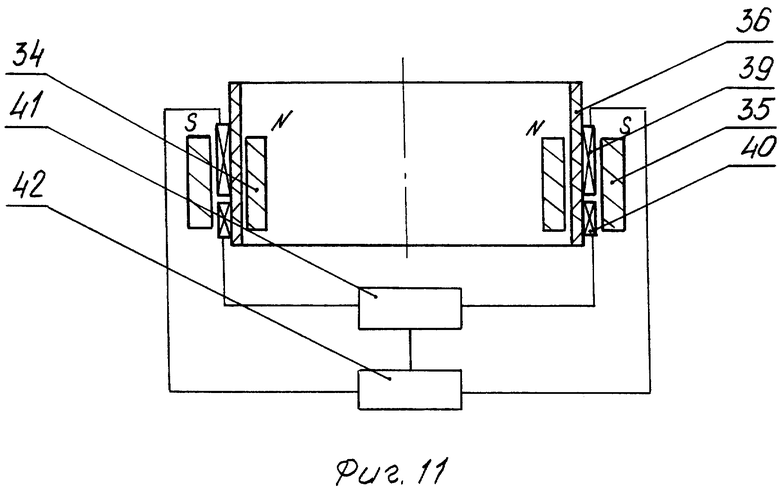
На фиг.11 - в виде двух соленоидов.
Магнитный демпфер содержит основание 1 (фиг.1 и 2), стойки 2, закрепленные на основании 1, на которых закреплены виброгасители 3, в состав которых входят упругие элементы растяжения 4, соединенные одними концами посредством первых переходников 5 с подвижной платформой 6, а другими - через вторые переходники 7 со стойками 2. Упругие элементы растяжения 4 установлены таким образом, что их продольные оси расположены под углом α к оси линейных колебаний подвижной платформы 6. В качестве упругих элементов растяжения могут быть использованы, например, цилиндрические пружины, резиновые жгуты и т.п. В качестве переходников 5, 7 можно применять, например, плоские металлические пружины, резиновые мембраны, резиновые кольца и т.п.
Стойка, виброгаситель с упругим элементом растяжения и переходниками представляют собой подвес.
На основании 1 закреплены также пары магнитов 8, содержащие магниты 9 и 10, соединенные с кронштейнами 11 и 12. Кронштейны 11 и 12 имеют подвижку относительно основания 1, например, в зазорах крепежных болтов (не показаны). Магниты в парах расположены с зазорами 13 и таким образом, что разноименные полюса расположены на внешних поверхностях пар. Следует заметить, что, используя подвижку кронштейнов 11 и 12, можно регулировать величину магнитного зазора. Кроме этого, выполняя кронштейны 11 и 12 из магнитомягкого материала и соединяя их основаниями, можно формировать магнитопровод для магнитов 9 и 10.
В одном из вариантов на подвижной платформе 6 закреплены проводящие пластины 14, находящиеся в магнитных зазорах 13 таким образом, что их плоскости перпендикулярны магнитным потокам, а размеры плоскостей превышают аналогичные размеры магнитов.
Следует заметить, что магнитные пары 8 и подвижная платформа 6 должны иметь регулировку по координате Z с целью выбора ее оптимального положения.
Для этого, например, вторые переходники 7 могут быть закреплены на стойках 2 с возможностью подвижки по координате Z, то же относится и к магнитам 9 и 10 относительно кронштейнов 11 и 12.
Целесообразно также пластины 14 выполнять съемными, чтобы иметь возможность их замены с целью подбора оптимальной массы для каждого конкретного случая использования демпфера.
Возможно также использование на магнитах полимерных покрытий, в качестве которых можно использовать фторопласт толщиной порядка 10-30 мкм.
В случае использования магнитного демпфера для виброзащиты измерительных приборов, таких, например, как сканирующие зондовые микроскопы, где необходима замена объектов и зондов, целесообразно снабжать демпфер фиксатором, выполненным, например, в виде упоров 15 (фиг.3) и привода 16. В платформе 6 могут быть сформированы ориентиры 17.
В качестве привода 16 можно использовать электромагнит, винтовой толкатель и т.п.
Существует вариант, где упругие элементы растяжения 18 и 19 (фиг.4) закреплены попарно на третьих и четвертых переходниках 20 и 21 под углом β друг к другу. При этом между точками закрепления упругих элементов 18 и 19 на третьих переходниках 20 может быть расстояние А.
Возможно расположение упругих элементов растяжения 22 и 23, как показано на фиг.5, где пятые и шестые переходники 24 и 25 расположены на стойках 2 на расстоянии Б, а седьмые и восьмые переходники 26 и 27 - на платформе 6 на расстоянии В.
Существует вариант, в котором каждая рядом расположенная внешняя поверхность соседней пары магнитов 9 и 10 имеет (фиг.6) разные полюса.
С целью повышения эффективности работы магнитного демпфера возможно размещение дополнительных вторых проводящих пластин 28 между парами магнитов в зоне магнитных потоков между парами. Возможен также вариант, в котором все пространство между парами заполнено проводником 29 (фиг.7).
Существует также вариант (фиг.8), в котором каждая рядом расположенная внешняя поверхность соседней пары магнитов 30 и 31 имеет одноименные полюса.
При таком центрально-симметричном расположении магнитных пар дополнительные третьи проводящие пластины 32 могут располагаться между магнитными парами по замкнутому контуру.
Существует также вариант, в котором проводящий гаситель выполнен в виде замкнутого контура 33 (фиг.9). При этом магниты 34 и 35 могут иметь цилиндрические поверхности, обращенные к гасителю.
Возможно также выполнение проводящего гасителя в виде первого соленоида 36 (фиг.10), подключенного к источнику тока 37. Соленоид 36 может быть выполнен на диэлектрическом кольце 38. В этом случае необходимо использовать центрально-симметричное расположение магнитных пар.
Для повышения эффективности работы целесообразно выполнять проводящий гаситель в виде второго 39 и третьего 40 соленоидов (фиг.11), один из которых подключен к анализатору тока 41, а другой - к усилителю тока 42, причем, анализатор тока 41 соединен выходом со входом усилителя тока 42. Анализатор тока 41 может содержать усилитель слабых токов и регулируемый усилитель мощности. Более подробно принцип обратной связи в системах активных виброгасителей описан в [3].
Магнитный демпфер работает следующим образом.
Устанавливают используемый прибор на платформу 6. Возникающие после этого резонансные колебания проводящего гасителя в магнитных затворах индуцируют в нем ток, который ускоряет процесс затухания колебаний платформы 6. В случае использования фиксатора привод 16 (фиг.3) давит на платформу 6, которая, вступая в контакт с упорами 15, фиксируется в пространстве.
При использовании соленоида 36 (фиг.10), пропуская через него ток, появляется возможность регулировать исходное положение платформы 6 при работе устройства. Кроме этого, также появляется возможность использовать соленоид 36 в качестве привода фиксатора. При этом, увеличивая величину тока, можно регулировать усилие прижима платформы 6 к упорам 15.
В случае использования двух соленоидов 39 и 40 (фиг.11) в соленоиде 39 при перемещении платформы 6 возникает ток. Анализатор 41 измеряет этот ток, усилитель 42 усиливает ток и подает его на соленоид 40, увеличивая при этом значение тока в ней с такой полярностью, что в системе реализуется обратная связь и это, соответственно, приводит к торможению платформы.
Расположение продольных осей упругих элементов растяжения под углом к оси линейных колебаний подвижной платформы позволяет более точно располагать ее в пространстве, что позволяет уменьшать магнитный зазор и, соответственно, повышает эффективность работы магнитного демпфера.
Закрепление проводящего гасителя на подвижной платформе позволяет проще оптимизировать его форму и массу, что позволяет выбирать нужную резонансную частоту подвижной платформы, это расширяет функциональные возможности демпфера. (Возможность выбирать нужную форму у проводников гораздо выше чем у магнитов. Например, самарий-кобальтовые магниты, которые часто используются в таких случаях с трудом поддаются механической обработке).
Формирование полимерного покрытия на магнитах препятствует их сколам и увеличивает долговечность.
Применение упоров и привода упрощает эксплуатацию демпфера и также приводит к увеличению срока его эксплуатации.
Попарное расположение упругих элементов растяжения под углом друг к другу улучшает ориентацию подвижной платформы в пространстве и повышает эффективность демпфера.
Соединение внешних поверхностей магнитов магнитопроводом повышает эффективность использования магнитного зазора.
Расположение пар магнитов таким образом, что рядом расположенные пары имеют разноименные полюса, позволяет более эффективно использовать пространство между парами и, соответственно, повышает эффективность демпфера.
Использование проводящих пластин с размерами плоскостей, превышающими аналогичные размеры магнитов, а также вторых проводящих пластин увеличивает эффективность использования демпфера.
Размещение проводящего гасителя в виде замкнутого контура в магнитных потоках центрально-симметрично расположенных магнитных пар повышает эффективность использования магнитного демпфера.
Использование в качестве проводящего гасителя соленоида, подключенного к источнику тока, позволяет управлять положением подвижной платформы в пространстве, что расширяет функциональные возможности прибора. Кроме этого, появляется возможность использовать соленоид в качестве привода, что особенно важно для использования магнитного демпфера в вакуумной камере.
Использование двух соленоидов, один из которых фиксирует перемещение, а второй его тормозит, позволяет ввести в демпфирование активную компоненту и повысить эффективность работы демпфера.
ЛИТЕРАТУРА
1. Патент США, US 3845929, G 02 B 23/02.
2. Патент США, US 4605194, F 16 М 13/00.
3. Active vibration isolation system TS 150, http://www.hwiscientific.com.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ДЕМПФЕР | 2024 |
|
RU2826670C1 |
| ВИБРОИЗОЛИРУЮЩАЯ МАГНИТНАЯ ОПОРА (ВАРИАНТЫ) | 2011 |
|
RU2477399C1 |
| Активная виброизолирующая платформа на основе магнитореологических эластомеров | 2015 |
|
RU2611691C1 |
| МАГНИТНЫЙ ВИБРОГАСИТЕЛЬ (ВАРИАНТЫ) | 2019 |
|
RU2708532C1 |
| Гаситель колебаний | 1984 |
|
SU1232878A1 |
| ИНЕРЦИОННЫЙ МАГНИТОЖИДКОСТНЫЙ ДЕМПФЕР (ВАРИАНТЫ) | 2013 |
|
RU2549592C1 |
| МАГНИТОЖИДКОСТНЫЙ ВИБРОГАСИТЕЛЬ | 2017 |
|
RU2657700C1 |
| Вибромагнитно-акустический преобразователь | 1989 |
|
SU1704062A1 |
| УСТРОЙСТВО ГАШЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ ЭЛЕМЕНТОВ АНТЕННЫХ СИСТЕМ, ВЫПОЛНЕННЫХ В ФОРМЕ КОНСОЛЬНОЙ БАЛКИ | 2018 |
|
RU2725826C2 |
| Виброгаситель сухого трения | 1990 |
|
SU1772457A1 |




Изобретение относится к устройствам, обеспечивающим защиту прецизионных устройств от внешних силовых воздействий, таких как вибрации, толчки и т.д. Магнитный демпфер содержит основание, подвесы, закрепленные на основании, содержащие виброгасители, в состав которых входят упругие элементы растяжения, соединенные с подвижной платформой, а также магниты, расположенные по замкнутой линии, и проводящий гаситель колебаний, установленный с возможностью взаимодействия с магнитными потоками, образованными магнитами. Продольные оси упругих элементов растяжения расположены под углом к оси линейных колебаний подвижной платформы. Проводящий гаситель колебаний закреплен на подвижной платформе. Магниты закреплены на основании парами с зазорами между магнитами таким образом, что разноименные полюса расположены на внешних поверхностях пар. Техническим результатом является повышение эффективности работы демпфера. 13 з.п. ф-лы, 11 ил.

| US 4605194 A, 12.08.1986 | |||
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 1993 |
|
RU2076961C1 |
| Амортизирующее устройство | 1979 |
|
SU859716A1 |

