Изобретение относится к медицине, а именно к травматологии и ортопедии, и может использоваться для аналитического определения жесткости моделей остеосинтеза любыми аппаратами внешней фиксации.
Известен способ определения жесткости моделей чрескостного остеосинтеза аппаратом Илизарова [1]. Согласно известного способа кольца аппарата, фиксирующие проксимальный костный фрагмент, жестко фиксируют к станине испытательного стенда. После этого к дистальному суставному концу в поперечном направлении посредством тарированных грузов прилагают смещающее усилие: сначала во фронтальной плоскости, а затем - в сагиттальной плоскости. О степени смещения костных фрагментов судят по показателям датчиков линейных перемещений часового типа, установленных вблизи перелома.
Недостатком данного способа и устройства для его осуществления является малая информативность.
Кроме этого важным недостатком всех известных способов является отсутствие строгого обозначения исследуемых компоновок аппаратов внешней фиксации. Известно, что текстовое описание операций чрескостного остеосинтеза, даже при наличии поясняющих рисунков, является недостаточно точным, поскольку оставляет значительный простор для интерпретации данных. Известно также, что даже незначительное изменение угла взаимного перекреста чрескостных элементов, расстояния между чрескостными элементами, диаметра внешних опор, их геометрии и др. существенно отражается на показателях жесткости остеосинтеза [3]. Таким образом, при использовании одинакового способа исследования разные исследователи могут получить различные цифровые данные. Это не позволяет сравнивать и анализировать данные разных авторов.
Известен “Метод унифицированного обозначения чрескостного остеосинтеза” [4], который позволяет точно описать тип используемых чрескостных элементов, их пространственное расположение, геометрию внешних опор и биомеханически задаваемое состояние между ними. Но ни в одном из известных способов исследования жесткости остеосинтеза этот метод не используется. Это не позволяет двум независимым исследователям точно (идентично) скомпоновать модель остеосинтеза. Поэтому результат исследований неминуемо будет различаться и не может считаться объективным. Модель Илизарова подтверждала и подтверждает свою достаточность для обеспечения возможности проводить лечение функционально. Поэтому стандартную конструкцию аппарата Илизарова предлагается принять за единицу измерения жесткости при чрескостном остеосинтезе.
Наиболее близким к предлагаемому является способ исследования моделей остеосинтеза, предполагающий исследование поперечной и ротационной характеристик жесткости, фиксации костных отломков и испытательный стенд для его реализации [2].
Способ заключается в том, что жестко закрепляют один из “отломков” в тисках, а к свободному прикладывают нагрузку посредством тарированных грузов, исследуют смещение от изгибающей нагрузки во фронтальной и сагиттальной плоскостях, а также от кручения в горизонтальной плоскости. После этого регистрируют величину смещения свободного “отломка” в месте “перелома” от нагрузки по датчикам и сравнивают величины спицевых и спицестержневых чрескостных аппаратов друг с другом.
Испытательный стенд состоит из фиксирующей части (тиски), диска, закрепленного на фиксированном “отломке”, на котором установлены два датчика линейных перемещений. Датчики подведены к свободному фрагменту в непосредственной близости от “перелома”, к свободному “отломку” прикладывают тарированные грузы.
Недостатками данного способа и устройства для его изготовления являются:
1. Конструкция испытательного стенда не позволяет исследовать осевую стабильность остеосинтеза.
2. Конструкция испытательного стенда и используемый способ проведения эксперимента не позволяет исследовать отдельные модули чрескостного аппарата.
Приводит к недостаточной информативности исследуемых конструкций.
Недостаточная информативность о жесткостных характеристик исследуемых чрескостных аппаратов.
Задачей является повышение качества лечения путем подбора индивидуального аппарата.
Функциональной единицей в построении аппаратов внешней фиксации является внешняя опора с закрепленными в ней чрескостными элементами. Она обозначена, как “модуль первого порядка” (M1).
Модули первого порядка с однотипными чрескостными элементами (только спицы или только стержни-шурупы) приняты, как однородные модули первого порядка (M1о). Внешние опоры, в которых закреплены различные типы чрескостных элементов (например, спица и стержень-шуруп) являются комбинированными модулями первого порядка (M1к).
В соответствии с установленными биомеханическими требованиями каждый костный фрагмент в чрескостном аппарате фиксируется одним или двумя модулями первого порядка. Два модуля первого порядка, объединенные в общую подсистему (фиксирующие один костный фрагмент), обозначены, как “модуль второго порядка” (М2).
Однородными модулями второго порядка (М2о) являются объединенные в единую подсистему два однородных модуля первого порядка. Соответственно, комбинированными модулями второго порядка (М2к) являются объединенные в единую подсистему два комбинированных модуля первого порядка.
О модулях третьего порядка для одного костного фрагмента можно говорить только гипотетически. Поэтому модулем третьего порядка (М3) является полная компоновка чрескостного аппарата. При наличии двух костных фрагментов М3-модуль может быть формализован тремя вариантами:
- М1+М1
- М1+М2 (М2+М1)
- М2+М2
В зависимости от типов использованных чрескостных элементов (только спицы, только стержни-шурупы, комбинация спиц и стержней-шурупов) М3 формально обозначаются, как М3о и М3к.
Общая классификация модулей в чрескостном остеосинтезе представлена в таблице 1.
Приведенная классификация модулей внешней фиксации обеспечивает планомерный характер исследований, предполагая определение “белых пятен” биомеханики чрескостного остеосинтеза в направлении от наиболее изученных однородных (спицевых) модулей первого порядка (M1о) к комбинированным модулям второго порядка (М2к) и полной компоновке чрескостного аппарата (М3). Поперечную в любой из плоскостей, ротационную, продольную жесткость фиксации костных фрагментов (имитатора кости) как чрескостными модулями, так и всей компоновкой в целом, обеспечивается использованием биомеханического стенда. Его конструктивные особенности позволяют легко и точно исследовать как жесткость чрескостных модулей, так и полные компоновки аппаратов внешней фиксации во всех шести степенях свободы.
Для возможности определения “слабых” звеньев в компоновке исследуемого чрескостного аппарата его исследуют поэтапно - в направлении от характеристик отдельных опор к полной компоновке.
Высокая точность, воспроизводимость и возможность проверки полученных данных любым исследователем также обеспечивается использованием “Метода унифицированного обозначения чрескостного остеосинтеза”.
Предлагаемый стенд для биомеханических исследований (фиг.1) состоит из станины - 1, фиксирующей панели - 2, зажимной муфты, двух балок с блоком - 5, одной балки для крепления датчиков - 3, двух датчиков линейных перемещений - 6, набора тарированных грузов.
Станина стенда изготавливается из стального уголка, жестко соединенного между собой в зоне стыков и имеет вид параллелепипеда.
Использование стального уголка обеспечивает высокую жесткость конструкции и, кроме этого, ребра уголка удобно использовать в качестве “направляющих” для балки фиксации датчиков, балками с блоком для моделирования ротационных, осевых (компрессия, дистракция) и поперечных нагрузок.
Форма параллелепипеда выбрана потому, что она обеспечивает удобство для фиксации чрескостных модулей и костных фрагментов, устройств для приложения смещающих нагрузок, измерения перемещений. Кроме этого, форма параллелепипеда обладает достаточной собственной жесткостью.
Фиксирующая панель стенда (фиг.2) жестко прикрепляется к торцевой части станины. В центре фиксирующей панели имеется отверстие. Кроме него, в фиксирующей панели имеются радиально расположенные отверстия. Отверстие предназначено для проведения в него выстоящего конца имитатора кости. Радиально расположенные отверстия предназначены для фиксации посредством болтов (хомутов) внешних опор аппаратов внешней фиксации. Предусмотрены отверстия для фиксации зажимной муфты по фиг.3.
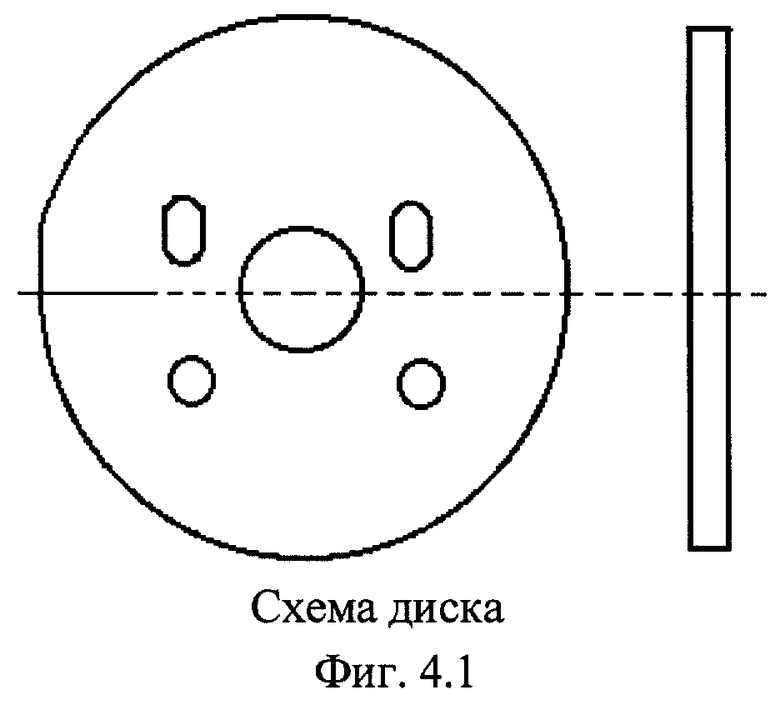
Зажимная муфта (фиг.3) жестко прикрепляется к фиксирующей панели стенда. Состоит из диска (фиг.4.1) и скобы (фиг.4.2). Зажимная муфта функционально предназначена для жесткой фиксации имитатора кости к фиксирующей панели стенда. Диск (фиг.4.1) зажимной муфты имеет отверстия для прикрепления болтами скобы и прикрепления к фиксирующей панели стенда. Скоба (фиг.4.2) состоит из двух симметричных частей, соединенных болтами.
Стенд комплектуется балкой для фиксации индикаторов линейного перемещения (фиг.5). Балка благодаря поперечным пазам, сделанным с каждого из ее концов, может быть перемещаема в плоскости основания станины. По всей длине балки сделана продольная прорезь для фиксации ножек индикаторов (датчиков). Наличие поперечных пазов и продольной прорези в балки делает возможным подведение датчика в любом выбранном положении.
Для возможности моделирования ротационных, осевых (компрессия, дистракция) и поперечных нагрузок стенд оснащен двумя балками с блоком (фиг.6). Балка благодаря поперечным пазам, сделанным с каждого из ее концов, может быть перемещаема в боковой плоскости станины. На одном конце балки имеется резьба с гайкой 2. При закручивании гайки балка, за счет расклинивания, прочно закрепляется к станине стенда. На балке может передвигаться в продольном направлении блок, состоящий из муфты 4 и штока 5 с роликом 6. Муфта 4 может возвратно-поступательно передвигаться по балке 1. Для ее фиксации в выбранном положении служит болт 7.
Используют способ и устройство следующим образом. Первым этапом определяют характеристики жесткости модулей первого и второго порядка исследуемого аппарата. Алгоритм проведения эксперимента для M1 и М2 одинаков.
Исследование продольной жесткости M1 и М2 (фиг.7, 8).
Для исследований продольной жесткости модулей требуется оснащение, приведенное на фиг.7, 8.
Внешнюю опору исследуемого модуля жестко крепят к фиксирующей панели 2 (фиг.1). К нагружаемому концу крепят металлическую планку. При ″компрессии″ балки с блоком подводят таким образом, чтобы создаваемые усилия от грузов были параллельны оси имитатора кости (фиг.7). Соответственно при ″дистракции″ (фиг.8) балки с блоками подводят с противоположной стороны от закрепленной на имитаторе планки. Как это показано на фиг.7 и 8, к торцу свободного конца имитатора кости подводят индикатор линейных перемещений. Посредством тарированных по 50 Н грузов прикладывают исследуемую нагрузку (например, “дистракция”) с постепенным ее увеличением: 50 Н - 100 Н - 150 Н - 200 Н и т.д. Фиксируют значения датчика, показывающего величину смещения имитатора кости в зависимости от каждого приращения груза. Эксперимент прекращают, когда индикатор покажет величину смещения имитатора кости на 1,2-1,5 мм. Переустановив блоки, исследуют жесткость модуля от нагрузки “компрессия”. Опыт повторяют троекратно и высчитывают средние величины смещения имитатора кости в зависимости от каждого шага нагрузки. Контрольной признается величина, при которой наступило смещение, величиной 1 мм.
Шаговая нагрузка величиной 50 Н выбрана имперически, при экспериментальном обосновании способа эксперимента. Было выявлено, что при исследовании большинства конструкций первые улавливаемые датчиками перемещения, которые значимы для репаративного остеогенеза, наступают при этой нагрузке. При исследовании конструкций, обеспечивающих низкие показатели жесткости остеосинтеза, величина шаговой нагрузки может быть уменьшена.
Максимальное значение индикатора 1,2-1,5 мм выбрано в связи с тем, что при смещении фрагментов на большие цифры приняты нецелесообразными к использованию в клинике, так как нагрузки, вызывающие подобное смещение, не благоприятно сказываются на формирование костной мозоли.
Исследования ротационной жесткости M1 и М2 (фиг.9).
Для проведения этой серии экспериментов используют оснащение, представленное на фиг.9.
Внешнюю опору исследуемого модуля жестко крепят к фиксирующей панели 2 (фиг.1). На свободном конце нагружаемого фрагмента имитатора кости монтируют металлическую планку (фиг.9) на расстоянии 50 мм от плоскости опоры (при М2 - от дистальной опоры). В точки А и В, которые равноудалены от центра имитатора кости, подводят два датчика. Рекомендуемое расстояние между датчиками L=100 мм. Нагрузку прилагают в точках А1 и В2 металлической планки. Точки А1 и В2 также равноудалены от центра имитатора кости. Рекомендуемое расстояние между точками А1 и В2, h=200 мм. Трос, фиксируемый к планке в точке А1, перекидывают через блок, который жестко прикреплен к станине стенда таким образом, что ролик находится на 30 мм выше металлической планки. Второй трос прикреплен к металлической планке в точке В1.
Посредством тарированных по 10 Н грузов, одновременно с обеих сторон, прикладывают нагрузку с постепенным ее увеличением: 20 Н - 40 Н - 60 Н - 80 Н и т.д.
Полученные по датчикам цифры перемещения (перемещение обозначено, как “V”) в точках А и В от каждого приращения груза (VAi и VBi, где i - порядковый номер прикладываемой нагрузки), используют для дальнейшей обработки.
По формуле tgαi=57,3 (VAi+VBi)/L (где L - расстояние между точками А и В) производят расчет угла поворота имитатора кости.
Эксперимент прекращается при угловом смещении tgαi=1,2-1,5 градуса. Опыт повторяют троекратно и высчитывают средние величины нагрузки, при которой наступило смещение имитатора кости на tgαi=1 градус.
Исследование поперечной жесткости M1 и М2
Для проведения этой серии экспериментов используют оснащение, представленное на фиг.10 и 11.
Исследование поперечной жесткости в сагиттальной плоскости
Для приложения нагрузки в сагиттальной плоскости (Для М1э - в растворе угла 60°) используют схему эксперимента по фиг.10. К свободному концу имитатора кости подводят два индикатора линейных перемещений часового типа на расстоянии а=40 мм друг от друга. Расстояние от кольцевой опоры (условная точка О) до первого индикатора b=40 мм, при исследовании М2 условная точка О находится в плоскости дистальной опоры. Посредством тарированных по 10 Н грузов прикладывают нагрузку в сагиттальной (относительно ориентации M1 и М2) плоскости с постепенным ее увеличением: 10 Н - 20 Н - 30 Н - 40 Н и т.д. Нагрузка прикладывается на расстоянии 100 мм от условной точки О.
Записывают значения датчиков, показывающих величины смещения имитатора кости (V) в точках А и В в зависимости от каждого приращения груза: VAi и VBi (i - порядковый номер прикладываемой нагрузки).
Угол поворота имитатора кости в зависимости от каждого приращения груза определяют по формуле tgϕi=57,3 (VAi-VBi)/a.
Эксперимент прекращается при угловом смещении tgαi=1,2-1,5 градуса.
Опыт повторяют троекратно и высчитывают средние величины нагрузки, приведшей к смещению имитатора кости на tgαi=1 градус.
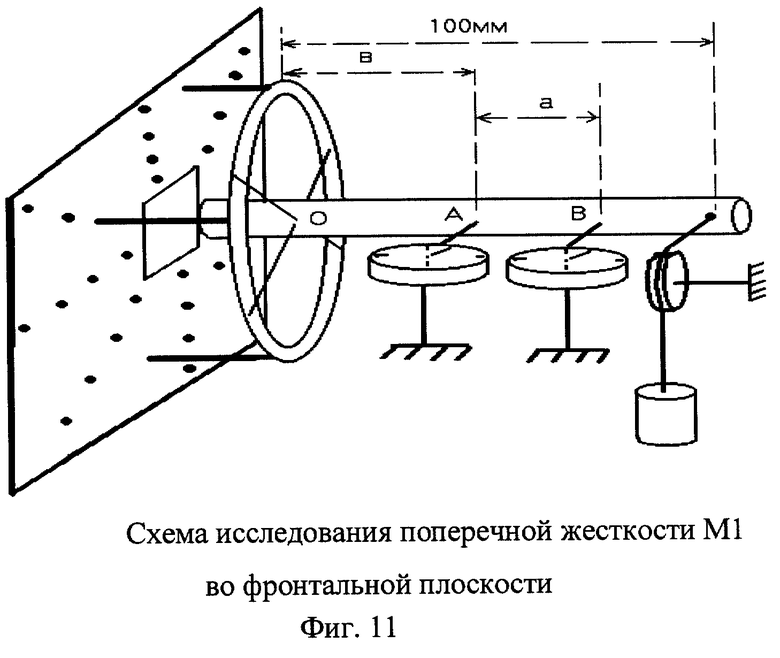
Исследование поперечной жесткости во фронтальной плоскости
Для приложения нагрузки во фронтальной плоскости (Для М1э - в растворе угла 30°) используют схему эксперимента по фиг.11. При исследовании жесткости во фронтальной плоскости можно не изменять расположение фиксации модели после проведения эксперимента в сагиттальной плоскости, а можно моделировать направление нагрузки используя блоки. Алгоритм проведения эксперимента аналогичен описанному выше - для нагрузки модуля в сагиттальной плоскости.
Исследования модуля в любой другой “промежуточной” поперечной плоскости проводится с той разницей, что модель крепят к фиксирующей панели стенда в положении, выбранном для исследования. Расположение датчиков, расстояние и величена прикладываемой нагрузки, а также расчеты аналогичны исследованию в сагиттальной плоскости.
Второй этап эксперимента - это исследование модуля 3-го порядка (М3). Алгоритм проведения эксперимента для М3 состоит в следующем.
Исследование продольной жесткости М3 (фиг.12 и 13).
Для исследований продольной жесткости модулей требуется оснащение, приведенное на фиг.12, 13.
Свободную часть проксимального фрагмента 1 (фиг.12 и 13) фиксируют в зажимной муфте 2 (фиг.12 и 13), которая болтами жестко прикреплена к фиксирующей панели стенда 3 (фиг.12. и 13). К свободному нагружаемому (дистальному) концу крепят металлическую планку 4 (фиг.12 и 13). При “компрессии” балки с блоком подводят таким образом, чтобы создаваемые усилия от грузов были параллельны оси имитатора кости. Соответственно при “дистракции” (фиг.13) балки с блоками 5 подводят с противоположной стороны от закрепленной на имитаторе планки. Как это показано на фиг.12 и 13, к торцу свободного конца имитатора кости подводят индикатор линейных перемещений. Посредством тарированных по 50 Н грузов прикладывают исследуемую нагрузку (например, “дистракция”) с постепенным ее увеличением: 50 Н - 100 Н - 150 Н - 200 Н и т.д. Фиксируют значения датчика, показывающего величину смещения имитатора кости в зависимости от каждого приращения груза. Эксперимент прекращают, когда индикатор покажет величину смещения имитатора кости на 1,2-1,5 мм. Переустановив блоки, исследуют жесткость модуля от нагрузки “компрессия”. Опыт повторяют троекратно и высчитывают средние величины прикладываемой нагрузки, при которой наступило смещения имитатора кости величиной 1 мм.
Исследования ротационной жесткости М3 (фиг.14).
Для проведения этой серии экспериментов используют оснащение, представленное на фиг.14.
Свободную часть проксимального фрагмента аналогично исследованиям продольной, поперечной жесткости фиксируют в зажимной муфте, которая болтами жестко прикреплена к фиксирующей панели стенда. На свободном конце нагружаемого фрагмента имитатора кости монтируют металлическую планку 1 (фиг.14) на расстоянии 50 мм от плоскости дистальной опоры. В точки А и В, которые равноудалены от центра имитатора кости, подводят два датчика. Рекомендуемое расстояние между датчиками L=100 мм. Нагрузку прилагают в точках А1 и В2 металлической планки. Точки А1 и В2 также равноудалены от центра имитатора кости. Рекомендуемое расстояние между точками А1 и В2, h=200 мм. Трос, фиксируемый к планке в точке А1, перекидывают через блок, который жестко прикреплен к станине стенда таким образом, что ролик находится на 30 мм выше металлической планки. Второй трос прикреплен к металлической планке в точке В1.
Посредством тарированных по 10 Н грузов, одновременно с обеих сторон, прикладывают нагрузку с постепенным ее увеличением: 20 Н - 40 Н - 60 Н - 80 Н и т.д.
Полученные по датчикам цифры перемещения (перемещение обозначено, как “V”) в точках А и В от каждого приращения груза (VAi и VBi, где i - порядковый номер прикладываемой нагрузки), используют для дальнейшей обработки.
По формуле tgαi=57,3 (VAi+VBi)/L (где L - расстояние между точками А и В) производят расчет угла поворота имитатора кости.
Эксперимент прекращается при угловом смещении tgαi=1,2-1,5 градуса.
Опыт повторяют троекратно и высчитывают средние величины нагрузки, при которой наступило смещение имитатора кости на tgαi=1.
Исследование поперечной жесткости МЗ
Для проведения этой серии экспериментов используют оснащение, представленное на фиг.15 и 16.
Исследование поперечной жесткости МЗ в сагиттальной плоскости
Для приложения нагрузки в сагиттальной плоскости (Для М3э - в растворе угла 60° базовых опор) используют схему эксперимента по фиг.15. К (дистальному) свободному концу имитатора кости подводят два датчика линейных перемещений часового типа на расстоянии а=40 мм друг от друга. Расстояние от кольцевой опоры (условная точка О) до первого индикатора b=40 мм. Посредством тарированных по 10 Н грузов прикладывают нагрузку в сагиттальной (относительно ориентации М1э) плоскости с постепенным ее увеличением: 10 Н - 20 Н - 30 Н - 40 Н и т.д. Нагрузка прикладывается на расстоянии 100 мм от условной точки О, располагающейся в плоскости дистальной опоры. Записывают значения датчиков, показывающих величины смещения имитатора кости (V) в точках А и В в зависимости от каждого приращения груза: VAi и VBi (i - порядковый номер прикладываемой нагрузки).
Угол поворота имитатора кости в зависимости от каждого приращения груза определяют по формуле tgϕi=57,3 (VAi-VBi)/a.
Эксперимент прекращается при наступлении углового смещения tgαi=1,2-1,5 градусов.
Опыт повторяют троекратно и высчитывают средние величины нагрузки, приведшей к смещению имитатора кости на tgαi=1 градус.
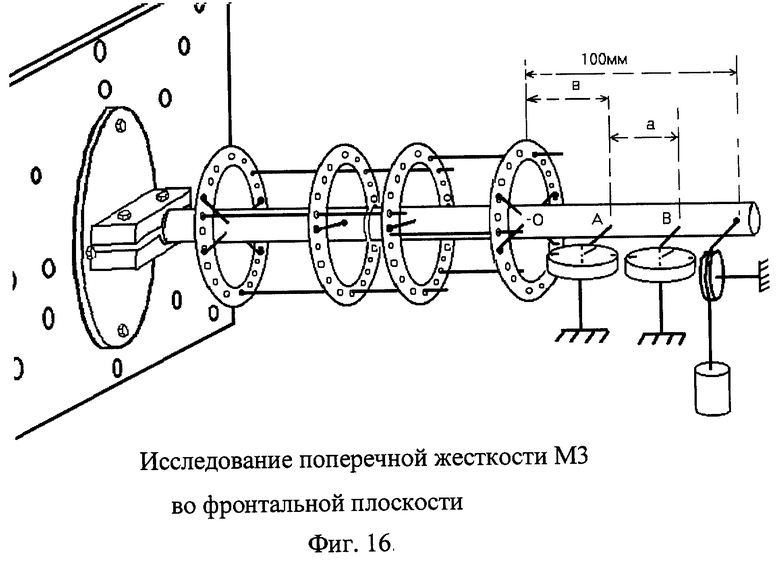
Исследование поперечной жесткости М3 во фронтальной плоскости
Для приложения нагрузки во фронтальной плоскости (Для М3э - в растворе угла 30° базовых опор) используют схему эксперимента по фиг.16. При исследовании жесткости во фронтальной плоскости можно не изменять расположение фиксации модели после проведения эксперимента в сагиттальной плоскости, а можно моделировать направление нагрузки, используя блоки. Алгоритм проведения эксперимента аналогичен описанному выше - для нагрузки модуля в сагиттальной плоскости.
Исследования модуля в любой другой “промежуточной” поперечной плоскости проводится с той разницей, что модель крепят к фиксирующей панели стенда в положении, выбранном для исследования. Расположение датчиков, расстояние и величена прикладываемой нагрузки, а также расчеты аналогичны исследованию в сагиттальной плоскости.
Таким образом, предложенный способ исследования жесткости моделей чрескостного остеосинтеза и устройство для его осуществления позволяет провести исследования жесткости моделей чрескостных модулей и полных компоновок чрескостных аппаратов, по алгоритму стандартных действий определения основных характеристик жесткости. Устройство “биомеханический стенд” позволяет исследовать как модули чрескостного остеосинтеза, так и полные компоновки аппаратов внешней фиксации во всех шести степенях свободы.
Для возможности определения “слабых” звеньев в компоновке исследуемого чрескостного аппарата его исследуют поэтапно - в направлении от характеристик отдельных опор к полной компоновке. Таким образом решается задача повышения качества лечения путем подбора индивидуального аппарата.
Источники информации
1. Воротников А.А. Клинико-экспериментальные аспекты лечения диафизарных переломов костей предплечья методом чрескостного остеосинтеза: Дис.... канд. мед. наук. - Ставрополь, 1984. - 137 с.
2. Новоселов К.А. Обоснование и разработка новых методов оперативного лечения закрытых диафизарных переломов бедренной кости: Дис.... канд. мед. наук. - Ленинград, 1988. - С.97-102 - (219 с.).
3. Шевцов В.И., Немков В.А., Скляр Л.В. Аппарат Илизарова. Биомеханика: Курган, 1995 - 165 с.
4. Барабаш А.П., Соломин Л.Н. “Эсперанто” проведение чрескостных элементов при остеосинтезе аппаратом Илизарова: Новосибирск, 1997. – 187 с.
Таблица 1.
Модули в чрескостном остеосинтезе
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛЕЧЕНИЯ НЕСТАБИЛЬНЫХ ЧРЕЗВЕРТЕЛЬНЫХ ПЕРЕЛОМОВ | 2001 |
|
RU2210996C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ МЯГКИХ ТКАНЕЙ ОТНОСИТЕЛЬНО КОСТИ ПРИ РОТАЦИИ СЕГМЕНТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2299678C2 |
| СПОСОБ УДЛИНЕНИЯ БЕДРЕННОЙ КОСТИ ПОВЕРХ ИНТРАМЕДУЛЛЯРНОГО СТЕРЖНЯ | 2015 |
|
RU2584555C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРЕЛОМА ИЛИ ПОСЛЕДСТВИЙ ТРАВМ ДИАФИЗА КОСТИ(ЕЙ) ПРЕДПЛЕЧЬЯ | 2012 |
|
RU2493791C1 |
| СПОСОБ ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ КОСТЕЙ ГОЛЕНИ | 2005 |
|
RU2299032C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЦЕЛОСТНОСТИ И ФУНКЦИОНАЛЬНОСТИ ПЯТОЧНОЙ КОСТИ ЧЕЛОВЕКА И АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2566663C2 |
| СПОСОБ ЧРЕСКОСТНОГО ОСТЕОСИНТЕЗА ПЕРЕЛОМОВ И ПОСЛЕДСТВИЙ ПЕРЕЛОМОВ ПЛЕЧЕВОЙ КОСТИ | 1999 |
|
RU2199967C2 |
| СПОСОБ ЛЕЧЕНИЯ ПОВРЕЖДЕНИЙ ПРЕДПЛЕЧЬЯ | 2008 |
|
RU2373916C2 |
| АППАРАТ ДЛЯ ДИСТРАКЦИОННОГО ОСТЕОСИНТЕЗА КОСТЕЙ КИСТИ И СТОПЫ | 2011 |
|
RU2508063C2 |
| Способ коррекции варусной деформации ног с использованием чрескостного остеосинтеза | 2023 |
|
RU2811957C1 |













Изобретение относится к медицине, а именно к травматологии и ортопедии, и может использоваться для аналитического определения жесткости моделей остеосинтеза любыми аппаратами внешней фиксации. Изобретение обеспечивает повышение качества лечения путем подбора индивидуального аппарата. Способ заключается в том, что исследуют поперечную продольную и ротационную характеристики жесткости, а исследования проводят поэтапно от модулей первого порядка к полной компоновке аппарата внешней фиксации. Устройство содержит станину и снабжено тарированными грузами, тросом, индикаторами перемещений, планкой для крепления к нагружаемому концу фрагмента имитатора кости, фиксирующей панелью, зажимной муфтой для фиксации имитатора кости, балкой для фиксации индикаторов перемещений, балками с блоками для моделирования ротационных, продольных и поперечных нагрузок. Станина выполнена в виде параллелепипеда. Фиксирующая панель выполнена с отверстиями для имитатора кости, фиксации опор аппаратов внешней фиксации и зажимной муфты и закреплена в торцевой части станины. Балка для фиксации индикаторов перемещений выполнена с продольной прорезью для их фиксации и размещена в основании станины на боковых пазах. Балки с блоками для моделирования ротационных, поперечных и продольных нагрузок размещены по боковым сторонам станины на боковых пазах. 2 н.п.ф-лы, 16 ил., 1 табл.

| Новоселов К.А | |||
| Обоснование и разработка новых методов оперативного лечения закрытых диафизарных переломов бедренной кости: Диссер., Ленинград, 1988, с.97-102 | |||
| Барабаш А.П | |||
| и др | |||
| “Эсперанто” проведения чрескостных элементов при остеосинтезе аппаратом Илизарова”, “Наука”, Новосибирск, 1997, с.11-21 | |||
| СПОСОБ ОЦЕНКИ НАДЕЖНОСТИ ФИКСАЦИИ КОСТНЫХ ФРАГМЕНТОВ НА МОДЕЛИ | 1990 |
|
RU2017460C1 |
| Модель позвоночника | 1979 |
|
SU1015421A1 |

