Изобретение относится к области высокоточных измерений с помощью лазерного излучения и может найти применение в геодезии, навигации, локации, а также геофизических исследованиях.
Известен электронно-оптический фазовый светодальномер по патенту СССР №1422006, МПК G 01 С 3/00, основанный на измерении времени прохождения лазерного импульса от дальномера до специально установленного отражателя, расположенного в точке, положение в пространстве которой должно быть определено. Электронно-оптический фазовый дальномер содержит блок измерения и индикации, прямоугольную призму в подвеске, отражатель, блоки наведения луча по горизонтали и вертикали посредством механических осей поворота призмы. Для измерения дальности и углов положения точки, в которой находится отражатель, необходимо навести луч лазера на него с помощью призмы.
Основным недостатком указанного электронно-оптического фазового дальномера является его неработоспособность при наличии значительных хаотических колебаний дальномера, вызванных внешней вибрацией, из-за того, что измеряющий луч дальномера пройдет мимо отражателя и соответственно невозможно будет зафиксировать отраженный луч, что приведет к невозможности определения как дальности, так и углов положения измеряемой точки относительно дальномера.
Также известен определитель по патенту РФ №2104485, МПК G 01 С 3/00, который является наиболее близким по технической сущности к заявляемому изобретению, принятый в качестве ближайшего аналога. Определитель местоположения цели, принятый в качестве ближайшего аналога, содержит оптический канал, лазерный излучатель, приемник отраженного лазерного импульса, высокоточный таймер, информационный дисплей и датчики углов положения цели относительно определителя местоположения цели. Оператор определителя местоположения цели через оптический канал визирует определитель местоположения цели на объект и инициирует измерение местоположения цели. В момент начала измерения (т.е. в момент выхода импульса из лазерного излучателя) происходит запуск таймера и снятие показаний с датчиков углов положения цели относительно определителя местоположения цели. После возвращения отраженного лазерного импульса и обнаружения его приемником таймер останавливается, по зафиксированному времени прохождения лазерного импульса вычисляется дальность до цели и выдается на дисплей вместе с географическими углами положения цели. При этом измерение углового положения цели производится по отклонению оптической оси излучателя дальномера от базы отсчета. Для перевода полученных относительных координат цели в географические координаты необходимо определять точные географические координаты базы отсчета в момент измерения координат цели. Однако это невозможно, поскольку определение географических координат производится до начала работы в основном режиме и в случае различных перемещений определителя местоположения цели в пространстве точность измерений будет уменьшена на величину этих перемещений, поскольку определитель местоположения цели теряет свое истинное положение в пространстве.
Основным недостатком ближайшего аналога по патенту №2104485 является низкая защищенность устройств для измерения углов местоположения цели от влияния возможной вибрации определителя местоположения цели, вызванной внешними факторами, например, работающим двигателем транспортного средства, на котором установлен определитель.
Перед изобретением поставлена задача снизить влияние вибрации определителя местоположения объекта на точность определения углов местоположения объекта.
Поставленная задача решается за счет того, что в определитель местоположения объекта, содержащий лазерный дальномер с источником когерентного излучения, с которым связан блок датчиков углов положения визируемого объекта относительно определителя местоположения объекта, а также устройство выдачи информации, дополнительно введена устанавливаемая на внешнем неподвижном основании отражательная дифракционная решетка, а источник когерентного излучения лазерного дальномера снабжен светоделителем, оптическим каналом для визирования отделенного луча на отражательную дифракционную решетку и узлом управления оптическим каналом, также в определитель местоположения объекта введены последовательно связанные оптическая система для приема отраженного луча от дифракционной решетки, фотоматрица, блок обработки интерференционной картины и вычислитель скорректированных углов положения визируемого объекта, при этом выход вычислителя скорректированных углов положения визируемого объекта связан с входом устройства выдачи информации, выход блока датчиков углов положения визируемого объекта связан со вторым входом вычислителя скорректированных углов положения визируемого объекта, а выход лазерного дальномера связан с входом синхронизации блока обработки интерференционной картины.
Техническим результатом изобретения является снижение влияния вибрации определителя местоположения объекта на точность определения углов местоположения визируемого объекта.
Перечень фигур и чертежей.
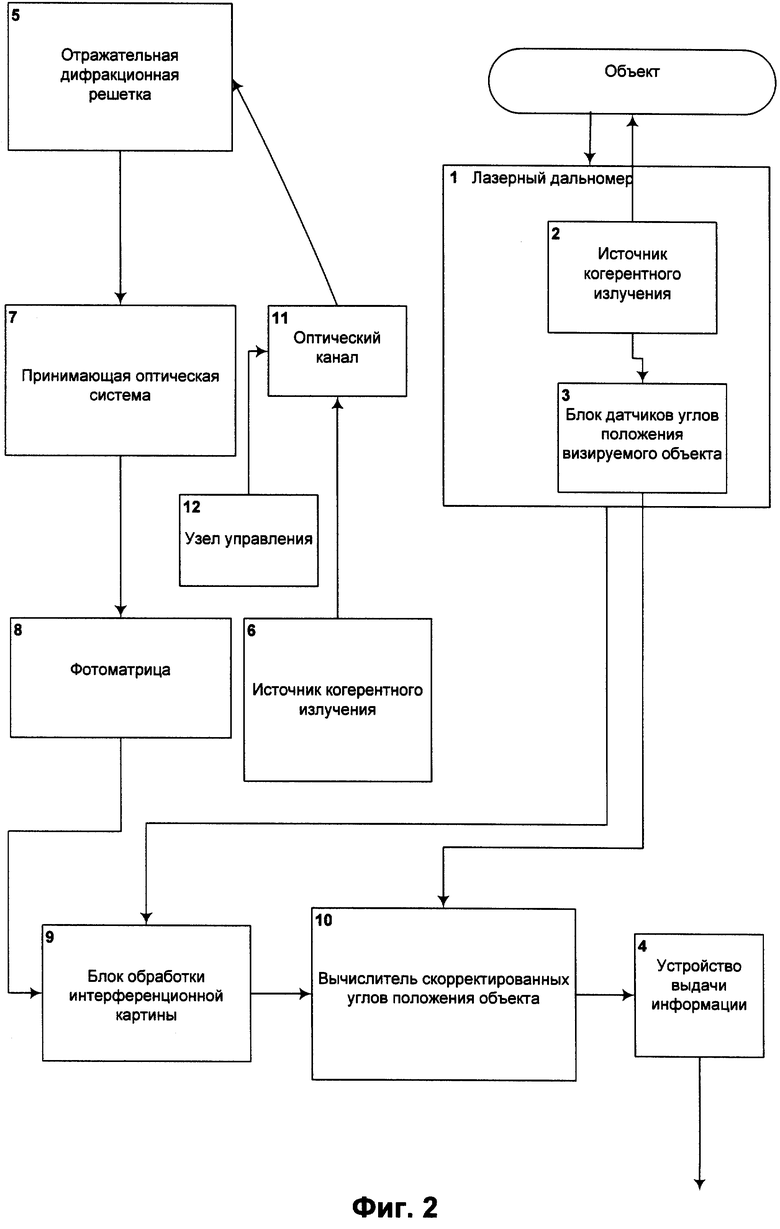
На фиг.1 изображена блок-схема первого варианта изобретения;
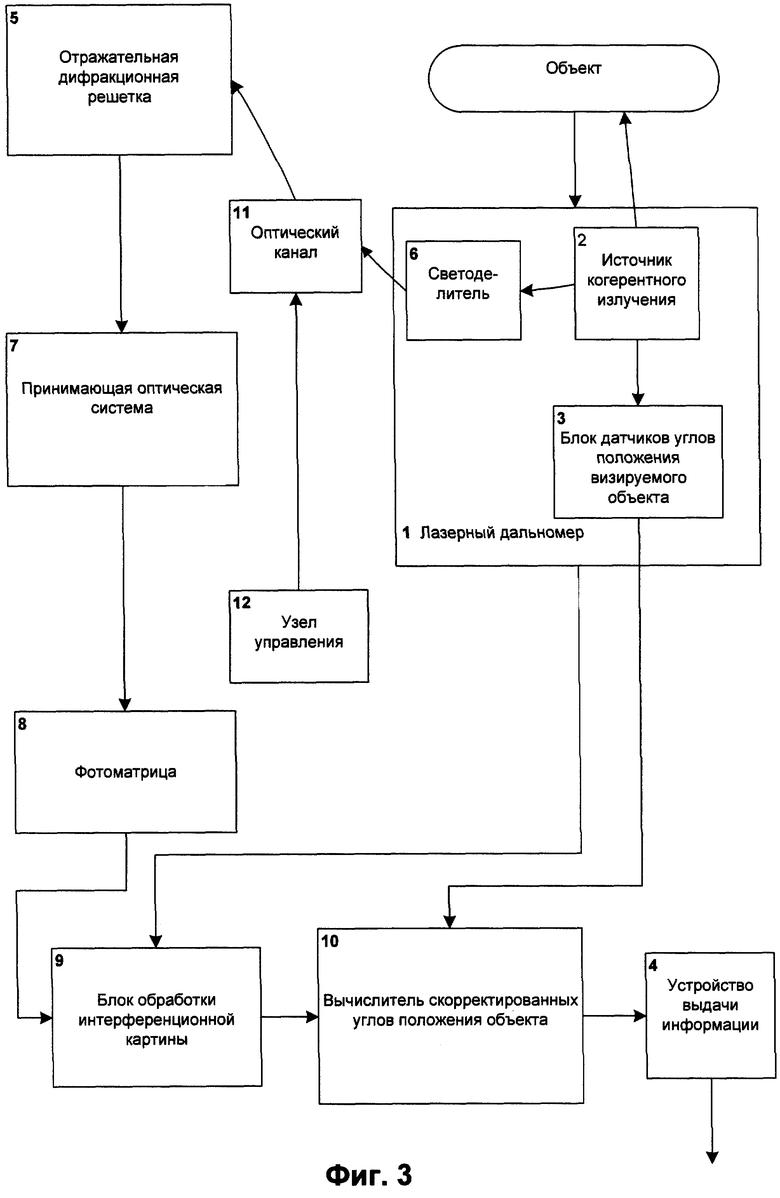
на фиг.2 изображена блок-схема первого варианта изобретения с дополнениями;
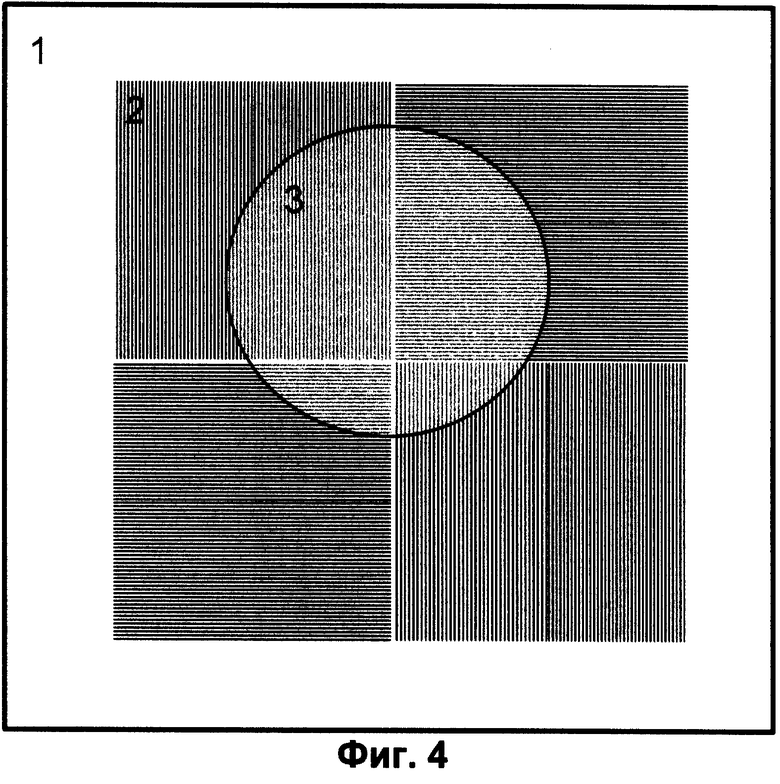
на фиг.3 изображена блок-схема второго варианта изобретения;
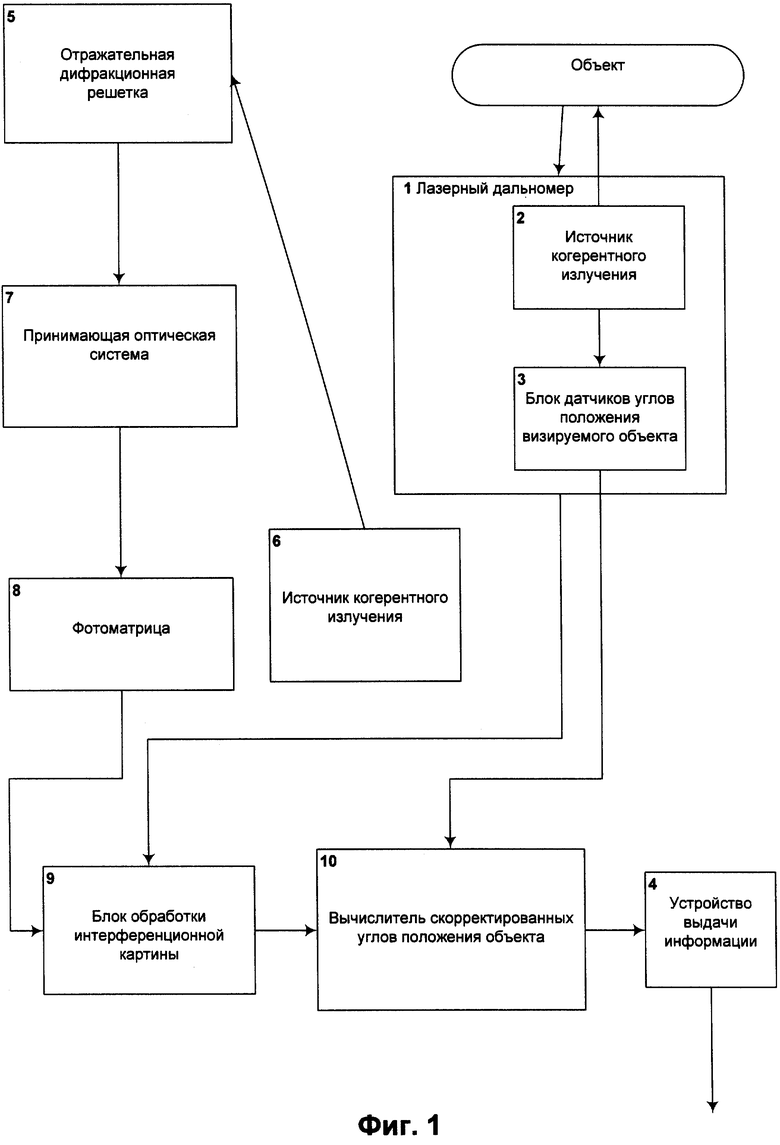
нафиг.4 изображена принципиальная схема расположения штрихов на дифракционной решетке;
Определитель местоположения объекта, по первому варианту (см. фиг.1), состоит из лазерного дальномера 1 с источником 2 когерентного излучения, с которым связан блок 3 датчиков углов положения визируемого объекта относительно определителя местоположения объекта, устройства 4 выдачи информации, устанавливаемой на внешнем неподвижном основании отражательной дифракционной решетки 5, дополнительного источника 6 когерентного излучения, предназначенного для освещения дифракционной решетки 5, и последовательно связанных оптической системы 7 для приема отраженного луча от дифракционной решетки, фотоматрицы 8, блока обработки интерференционной картины 9 и вычислителя 10 скорректированных углов положения визируемого объекта, при этом выход вычислителя 10 скорректированных углов положения визируемого объекта связан с входом устройства 4 выдачи информации, выход блока 3 датчиков углов положения визируемого объекта связан со вторым входом вычислителя 10 скорректированных углов положения визируемого объекта, а выход лазерного дальномера 1 связан с входом синхронизации блока 9 обработки интерференционной картины. Отражательная дифракционная решетка 5 выполнена в виде металлической пластины, на ее полированной лицевой стороне нанесены дифракционные штрихи, так как это показано на фиг.4. Дополнительный источник 6 когерентного излучения необходимо разместить в корпусе определителя так, чтобы была жесткая механическая связь с базой, от которой отсчитываются углы положения объекта. Оптическая система 7 для приема отраженного луча от дифракционной решетки представляет собой систему линз для фокусирования интерференционной картины от дифракционной решетки на фотоматрицу 8. Фотоматрица 8 является ПЗС-матрицей с чувствительностью, достаточной, чтобы считывать интерференционную картину отраженного от дифракционной решетки лазерного луча с частотой не менее 100 Гц. Блок 9 обработки интерференционной картины предназначен для анализа интерференционной картины и выработки углового смещения луча в результате вибрации определителя от нейтрального положения. Вычислитель 10 скорректированных координат визируемого объекта представляет собой сумматор, складывающий углы положения визируемого объекта с соответствующей поправкой. Оптический канал 11 (см. фиг.2) представляет собой перископическую оптическую систему, окуляр которой предназначен для оператора определителя, а главная оптическая ось объектива однонаправлена с оптической осью дополнительного источника 6 когерентного излучения. Узел управления 12 лучом дополнительного источника 6 когерентного излучения служит для наведения оптической оси объектива оптического канала 11 источника 6 на дифракционную решетку 5.
Определитель местоположения объекта, по второму варианту (см. фиг.3), состоит из лазерного дальномера 1 с источником 2 когерентного излучения, с которым связан блок 3 датчиков углов положения визируемого объекта относительно определителя местоположения объекта, устройства 4 выдачи информации, устанавливаемые на внешнем неподвижном основании отражательной дифракционной решетки 5, светоделителя 6 и последовательно связанных оптической системы 7 для приема отраженного луча от дифракционной решетки, фотоматрицы 8, блока обработки интерференционной картины 9 и вычислителя 10 скорректированных углов положения визируемого объекта, а также оптического канала 11 и узла управления 12 оптическим каналом 11, при этом выход вычислителя 10 скорректированных углов положения визируемого объекта связан с входом устройства 4 выдачи информации, выход блока 3 датчиков углов положения визируемого объекта связан со вторым входом вычислителя 10 скорректированных углов положения визируемого объекта, а выход лазерного дальномера 1 связан с входом синхронизации блока 9 обработки интерференционной картины. Отражательная дифракционная решетка 5 выполнена в виде металлической пластины, на ее полированной лицевой стороне нанесены дифракционные штрихи, так как это показано на фиг.4. Светоделитель 6 прикреплен к выходу источника 2 когерентного излучения и в свою очередь имеет два выхода. Первый выход светоделителя 6 пропускает основной поток света от источника 2, не изменяя его направления. Второй выход светоделителя 6 отклоняет часть потока света и направляет его в оптический канал 11. Оптический канал 11 представляет собой перископическую оптическую систему, окуляр которой предназначен для оператора определителя, а главная оптическая ось объектива однонаправлена с оптической осью дополнительного источника 6 когерентного излучения. Узел управления 12 лучом дополнительного источника 6 когерентного излучения служит для наведения оптической оси объектива оптического канала 11 источника 6 на дифракционную решетку 5. Оптическая система 7 для приема отраженного луча от дифракционной решетки представляет собой систему линз для фокусирования интерференционной картины от дифракционной решетки на фотоматрицу 8. Фотоматрица 8 является ПЗС-матрицей с чувствительностью, достаточной, чтобы считывать интерференционную картину отраженного от дифракционной решетки лазерного луча с частотой не менее 100 Гц. Блок 9 обработки интерференционной картины предназначен для анализа интерференционной картины и выработки углового смещения луча в результате вибрации определителя от нейтрального положения. Вычислитель 10 скорректированных координат визируемого объекта представляет собой сумматор, складывающий углы положения визируемого объекта с соответствующей поправкой.
Перед началом работы определителя местоположения цели по первому пункту формулы в основном режиме необходимо выполнить следующие действия: осветить дополнительным источником 6 когерентного излучения участок грунта на расстоянии 1-5 м, затем установить отражательную дифракционную решетку 5 таким образом, чтобы пятно луча от источника 6 оказалось в рабочей области решетки 5 (см. фиг.4), при этом решетка должна быть установлена так, чтобы не менять своего положения во время работы определителя, ориентация самой решетки 5 произвольная. При наличии в определителе, по второму пункту формулы, источника 6 когерентного излучения, снабженного оптически каналом 11 и узлом управления 12 лучом дополнительного источника 6, возможно изменить эту последовательность, выбрав сначала участок грунта, на котором удобнее установить отражательную дифракционную решетку, а затем навести на нее луч дополнительного источника 6 при помощи оптического канала 11 и узла управления 12. Затем на фотоматрице 8 однократно фиксируется интерференционная картина при отсутствии внешней вибрации и блок 9 обработки интерференционной картины по характеру переданного от фотоматрицы изображения вычисляет угол падения луча источника 6 на решетку 5, этот угол считается нейтральным (нулевым), смещение от него принимается за ошибку, возникшую в результате вибрации. Также блок 9 по характеру интерференционной картины вычисляет ориентацию штрихов решетки относительно горизонта. Эти данные передаются в вычислитель 10, где сохраняются. В случае, когда невозможно измерить нейтральный угол из-за постоянной вибрации определителя, производится множество фиксаций интерференционной картины через равные промежутки времени, не совпадающие с характерной частотой вибрации определителя, нейтральный угол вычисляется как среднее арифметическое полученных углов.
После выполнения всех этих операций определитель готов к работе в основном режиме. В основном режиме дополнительный источник 6 когерентного излучения непрерывно освещает дифракционную решетку 5, поэтому на фотоматрице 8 в каждый момент фиксируется интерференционная картина отраженного от решетки 5 луча источника 6, при этом интерференционная картина постоянно меняется, так как дифракционная решетка 5 неподвижна, а определитель изменяет свое положение в пространстве в результате внешней вибрации. В момент начала измерения координат визируемого объекта (т.е. в момент выхода импульса из лазерного излучателя) передается сигнал от лазерного дальномера 1 к блоку 9 обработки интерференционной картины, а также в блок 3 датчиков углов положения визируемого объекта, после получения этого сигнала блок 3 передает значения измеренных углов в вычислитель 10 скорректированных углов положения визируемого объекта. После получения сигнала от лазерного дальномера 1 блок 9 обработки интерференционной картины снимает с фотоматрицы 8 последнее сформированное изображение и вычисляет по этому изображению углы, под которыми луч источника 6 когерентного излучения падает на дифракционную решетку 5. После этого величины углов передаются в вычислитель 10 скорректированных углов местоположения объекта, где, во-первых, из этих величин вычитается нейтральный угол и, таким образом, вычисляется ошибка, возникшая из-за вибрации базы отсчета. Во-вторых, эта ошибка прибавляется к углам, полученным от блока 3 датчиков углов положения и на выходе вычислителя, таким образом, получаются скорректированные углы положения визируемого объекта, которые передаются в устройство 4 выдачи информации. Эти углы и дальность до визируемого объекта составляют уточненные относительные координаты визируемого объекта, получение которых является целью заявляемого изобретения.
Таким образом, достигнуто снижение влияния вибрации определителя местоположения объекта на точность определения углов местоположения визируемого объекта.
Перед началом работы определителя местоположения цели по третьему пункту формулы в основном режиме необходимо выполнить следующие действия: установить отражательную дифракционную решетку 5 на расстоянии 1-5 м от определителя таким образом, чтобы она находилась в прямой видимости от определителя местоположения объекта. Затем необходимо расположить светоделитель 6 с помощью узла управления 12 и оптического канала 11, так чтобы отклоняемый луч попал на рабочую область дифракционной решетки 5 (см. фиг.4). Затем на фотоматрице 8 однократно фиксируется интерференционная картина при отсутствии внешней вибрации и блок 9 обработки интерференционной картины по характеру переданного от фотоматрицы изображения вычисляет угол падения луча источника 6 на решетку 5, этот угол считается нейтральным (нулевым), смещение от него принимается за ошибку, возникшую в результате вибрации. Также блок 9 по характеру интерференционной картины вычисляет ориентацию штрихов решетки относительно горизонта. Эти данные передаются в вычислитель 10, где сохраняются. В случае, когда невозможно измерить нейтральный угол из-за постоянной вибрации определителя, производится множество фиксаций интерференционной картины через равные промежутки времени, не совпадающие с характерной частотой вибрации определителя, нейтральный угол вычисляется как среднее арифметическое полученных углов.
После выполнения всех этих операций определитель готов к работе в основном режиме. В основном режиме дополнительный источник 6 когерентного излучения непрерывно освещает дифракционную решетку 5, поэтому на фотоматрице 8 в каждый момент фиксируется интерференционная картина отраженного от решетки 5 луча источника 6, при этом интерференционная картина постоянно меняется, так как дифракционная решетка 5 неподвижна, а определитель изменяет свое положение в пространстве в результате внешней вибрации. В момент начала измерения координат визируемого объекта (т.е. в момент выхода импульса из лазерного излучателя) передается сигнал от лазерного дальномера 1 к блоку 9 обработки интерференционной картины, а также в блок 3 датчиков углов положения визируемого объекта, после получения этого сигнала блок 3 передает значения измеренных углов в вычислитель 10 скорректированных углов положения визируемого объекта. После получения сигнала от лазерного дальномера 1 блок 9 обработки интерференционной картины снимает с фотоматрицы 8 последнее сформированное изображение и вычисляет по этому изображению углы, под которыми луч источника 6 когерентного излучения падает на дифракционную решетку 5. После этого величины углов передаются в вычислитель 10 скорректированных углов местоположения объекта, где, во-первых, из этих величин вычитается нейтральный угол и, таким образом, вычисляется ошибка, возникшая из-за вибрации базы отсчета. Во-вторых, эта ошибка прибавляется к углам, полученным от блока 3 датчиков углов положения и на выходе вычислителя, таким образом, получаются скорректированные углы положения визируемого объекта, которые передаются в устройство 4 выдачи информации. Эти углы и дальность до визируемого объекта составляют уточненные относительные координаты визируемого объекта, получение которых является целью заявляемого изобретения.
Таким образом, достигнуто снижение влияния вибрации определителя местоположения объекта на точность определения углов местоположения визируемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2002 |
|
RU2264595C2 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРОТКИХ ДИСТАНЦИЙ ДО ДИФФУЗНО-ОТРАЖАЮЩИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092787C1 |
| ГРАВИТАЦИОННО-ВОЛНОВОЙ ДЕТЕКТОР | 2000 |
|
RU2171482C1 |
| ДИФРАКЦИОННЫЙ ИНТЕРФЕРОМЕТР (ВАРИАНТЫ) | 2003 |
|
RU2240503C1 |
| ДВУХКАНАЛЬНЫЙ ДИФРАКЦИОННЫЙ ФАЗОВЫЙ МИКРОСКОП | 2015 |
|
RU2608012C2 |
| Интерферометр | 1990 |
|
SU1749700A1 |
| ИНТЕНФЕРОМЕТР ДЛЯ КОНТРОЛЯ ПРЯМОЛИНЕЙНОСТИ И ПЛОСКОСТНОСТИ ПОВЕРХНОСТИ ОБЪЕКТА | 1981 |
|
SU980507A1 |
| ИНТЕРФЕРОМЕТР | 2010 |
|
RU2423663C1 |
| Устройство для демонстрации явлений интерференции и дифракции света | 1989 |
|
SU1622897A1 |
Изобретение относится к области высокоточных измерений, используется в геодезии, в геофизических исследованиях. Перед началом работы освещают источником когерентного излучения участок грунта. Устанавливают отражательную дифракционную решетку, чтобы пятно луча от источника оказалось в рабочей области решетки. На фотоматрице фиксируют интерференционную картину, при отсутствии внешней вибрации. Блок обработки интерференционной картины вычисляет нулевой угол падения луча источника на решетку и ориентацию штрихов решетки относительно горизонта. Данные сохраняются в вычислителе скорректированных углов положения. В основном режиме работы дополнительный источник когерентного излучения освещает дифракционную решетку. Передается сигнал от лазерного дальномера к блоку обработки интерференционной картины, а также в блок датчиков углов положения визируемого объекта. Блок передает значения измеренных углов в вычислитель скорректированных углов положения визируемого объекта. Блок снимает с фотоматрицы последнее сформированное изображение и вычисляет углы, под которыми луч источника когерентного излучения падает на решетку. Величины углов передаются в вычислитель скорректированных углов. Вычисляется ошибка, возникшая из-за вибрации базы отсчета. Ошибка прибавляется к углам, полученным от блока датчиков углов положения. На выходе вычислителя скорректированные углы положения передаются в устройство выдачи информации. Технический результат - снижение влияния вибрации определителя на точность определения углов местоположения визируемого объекта. 2 н. и 1 з.п. ф-лы, 4 ил.
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 1996 |
|
RU2104485C1 |
| Электроннооптический фазовый светодальномер | 1985 |
|
SU1422006A1 |
| Светодальномер | 1985 |
|
SU1345056A1 |
| Фазовый светодальномер | 1975 |
|
SU538591A1 |
| US 6411371, 25.06.2002 | |||
| Визирный прибор | 1924 |
|
SU1581A1 |
| JP 2002139304, 17.05.2002. | |||

