Изобретение относится к ракетно-космической технике и, в частности, к конструкциям космических аппаратов (спутников).
Из патентной литературы известны космические аппараты, состоящие из отдельных модулей со стандартными системами и агрегатами (см., например, пат. США №6206327, кл. 244/I58R, B 64 G 1/00, от. 27.03.2001 г.).
Из патентной же литературы известна модульная конструкция космического аппарата (для искусственного спутника), содержащая модули бортовой аппаратуры, с возможностью изменения взаимного положения модулей при выведении в составе ракеты-носителя и при автономном функционировании космического аппарата на орбите (см., например, пат. США №6220548, кл. 244/I58R, B 64 G 1/50, от. 24.04.2001 г.).
Однако в этих конструкциях не предусматриваются пути и средства для повышения точности стабилизации космического аппарата, для исключения загрязнения "холодной" оптики, для решения задачи электромагнитной совместимости, дифференциального подхода к условиям эксплуатации различной аппаратуры, для обеспечения заданной точности ориентации визирных осей оптических приборов.
Задачей данного изобретения является создание модульной конструкции космического аппарата, в которой бы предусматривались средства для достижения технических результатов, таких как повышение точности стабилизации космического аппарата, исключение загрязнения "холодной" оптики, обеспечение электромагнитной совместимости, дифференциального подхода к условиям эксплуатации различной аппаратуры, обеспечение заданной точности ориентации визирных осей оптических приборов.
Данная задача решается тем, что в модульной конструкции космического аппарата, содержащей модули бортовой аппаратуры с возможностью изменения взаимного положения модулей при выведении в составе ракеты-носителя и при автономном функционировании космического аппарата на орбите, в соответствии с изобретением, один из модулей содержит служебную аппаратуру, а остальные - целевую аппаратуру и командно-измерительные приборы системы управления, например гироскопический измеритель вектора угловой скорости (ГИВУС) и астродатчики, целевая аппаратура установлена в трех модулях: оптическая целевая аппаратура инфракрасного диапазона с охлаждаемыми элементами в центральном модуле, а радиотехническая целевая аппаратура бортового ретранслятора в боковых модулях, имеющих возможность изменять свое положение относительно центрального модуля, оптические приборы целевой аппаратуры и командно-измерительные приборы системы управления космического аппарата установлены на единой размеростабильной раме, выполненной из конструкционных материалов с более низким уровнем коэффициента линейного термического расширения по сравнению с материалами остальной конструкции центрального модуля, и объединены с каркасом центрального модуля через три шарнирные опоры, охлаждаемые элементы оптической целевой аппаратуры соединены с радиаторами, например, низкотемпературными, уровня 190 К, выносимыми за пределы зоны теплового влияния на них конструкции космического аппарата при автономном функционировании космического аппарата на орбите, на модуле, содержащем служебную аппаратуру, установлены солнечные батареи, снижающие вредное динамическое влияние на точность стабилизации космического аппарата за счет жесткости их конструкции и использования привода солнечных батарей с устройством динамической разгрузки или пологим законом нарастания управляющего момента, для выполнения всех необходимых динамических операций космического аппарата, установлены только плазменные двигатели с рабочим телом, исключающим загрязнение оптической целевой аппаратуры инфракрасного диапазона с охлаждаемыми элементами.
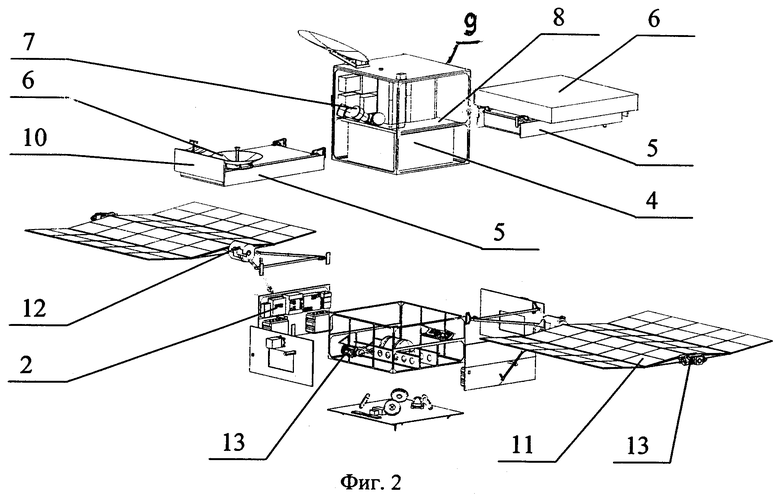
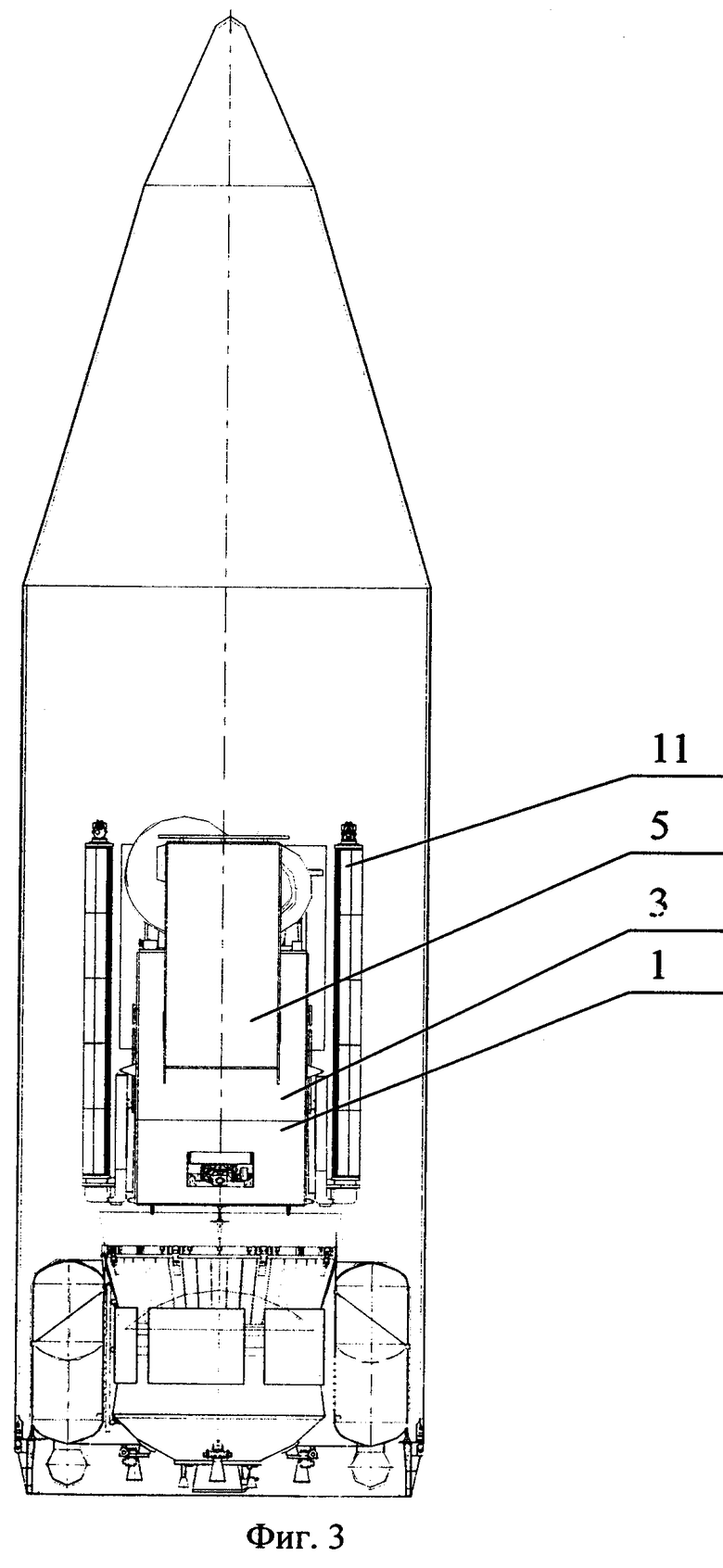
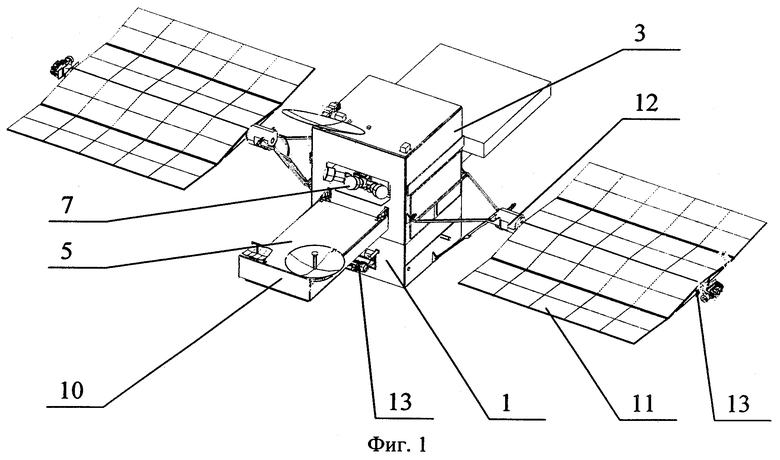
Далее изобретение поясняется более подробно с использованием графических материалов, где на фиг.1 показан общий вид модульной конструкции космического аппарата (КА) при автономном полете КА на орбите; на фиг.2 - та же модульная конструкция КА, но в "разобранном" виде; на фиг.3 - модульная конструкция КА в положении выведения в составе космической головной части (КГЧ) ракеты-носителя (РН).
Модульная конструкция космического аппарата (см. фиг.1) содержит модуль 1 со служебной аппаратурой 2 (фиг.2) и сборный модуль целевой аппаратуры, выполненный в виде трех отсеков или модулей: центрального модуля 3 с оптической целевой аппаратурой 4 инфракрасного диапазона с охлаждаемыми элементами и командно-измерительными приборами служебных систем, двух боковых модулей 5 с радиотехнической 6 целевой аппаратурой бортового ретранслятора, имеющих возможность изменять свое положение относительно центрального модуля. Т.е. боковые модули целевой аппаратуры соединены с центральным модулем целевой аппаратуры подвижно, например, через шарнирные, откидывающие или выдвижные соединения.
Оптические приборы целевой аппаратуры и командно-измерительные приборы 7 системы управления установлены на единой размеростабильной раме 8 (фиг.2), выполненной из конструкционных материалов с более низким уровнем коэффициента линейного термического расширения по сравнению с материалами остальной конструкции центрального модуля и объединены с каркасом 9 центрального модуля через три шарнирные опоры.
Охлаждаемые элементы оптической целевой аппаратуры соединены с радиаторами 10, например, низкотемпературными, уровня 190 К, выносимыми за пределы зоны теплового влияния на них конструкции космического аппарата при автономном функционировании КА на орбите.
Для снижения динамического влияния солнечных батарей 11 на точность стабилизации КА используется специальная конструкция СБ повышенной жесткости и привода 12 поворота с устройством динамической разгрузки или пологим законом нарастания управляющего момента.
На модуле, содержащем служебную аппаратуру, для выполнения всех необходимых динамических операций КА установлены только стационарные плазменные двигатели 13 с рабочим телом, исключающим загрязнение оптической целевой аппаратуры инфракрасного диапазона с охлаждаемыми элементами.
Описанная модульная конструкция КА используется и функционирует следующим образом:
Перед стартом ракеты-носителя, предназначенной для запусков на орбиты КА или спутников, в космическую головную часть (КГЧ) устанавливают предлагаемую конструкцию в собранном компактном виде (см. фиг.3). После вывода на соответствующую орбиту модульная конструкция КА приводится в положение и состояние автономного функционирования КА на орбите (см. фиг.1): разворачиваются солнечные батареи, боковые модули с оборудованием ретранслятора откидываются, разворачиваются или отводятся от центрального модуля целевой аппаратуры, включается в работу бортовая аппаратура служебного модуля, КА ориентируется в заданном направлении и начинает функционировать целевая оптическая, радиотехническая и другая целевая аппаратура.
Предлагаемая конструкция КА позволяет получить ряд преимуществ и положительных технических результатов. Так, например, монтаж целевой аппаратуры в трех автономных отсеках-модулях и использование функциональной и конструктивной автономности отсеков модуля целевой аппаратуры позволяет работы по проектированию, изготовлению и испытаниям отсеков проводить параллельно, модернизацию ретрансляционного комплекса и оптической целевой аппаратуры от изделия к изделию можно проводить независимо, появляется возможность поэтапного наращивания функциональных возможностей КА (первые космические аппараты только с оптической аппаратурой, последующие дооснащаются БРТК), дифференциальный подход к условиям эксплуатации различной аппаратуры.
Устройство динамической разгрузки выполняется, например, в виде маховика, установленного в приводе солнечной батареи. Маховик вращается в сторону, противоположную вращению солнечной батареи, и выполнен таким образом, что суммарный кинетический момент от вращения солнечной батареи и маховика равен нулю. Это позволяет значительно снизить возмущения на КА от вращения солнечных батарей и добиться высокой точности стабилизации КА.
Установка оптических приборов целевой аппаратуры, астроприборов и гироскопического измерителя вектора угловой скорости интегрированной системы управления космической платформы на единой развязанной с корпусом КА размеростабильной конструкции позволяет обеспечивать заданную точность ориентации визирных осей оптических приборов за счет исключения взаимных рассогласований посадочных мест целевой аппаратуры и командных приборов системы управления движением. Использование привода поворота солнечных батарей с устройствами динамической разгрузки или с пологим законом нарастания управляющего момента для обеспечения заданной точности стабилизации КА, а также использование для коррекции орбиты плазменных двигателей с низким уровнем тяги, их размещение и высокая чистота струи, исключающая загрязнение “холодной” оптики, позволяют значительно улучшить технические и эксплуатационные характеристики КА. Обеспечению заданной точности стабилизации КА способствует также и применение конструкции солнечных батарей высокой жесткости.
Обеспечению тепловых режимов оборудования при эксплуатации КА на геостационарной орбите способствует также и приоритетное размещение приборов на "северной" и "южной" панелях КА
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 2015 |
|
RU2621132C1 |
| УНИФИЦИРОВАННАЯ КОСМИЧЕСКАЯ ПЛАТФОРМА МОДУЛЬНОГО ПРИНЦИПА ПОСТРОЕНИЯ | 2018 |
|
RU2684877C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| КОСМИЧЕСКИЙ АППАРАТ С РЕГУЛЯРНОЙ ОРИЕНТАЦИЕЙ ОТНОСИТЕЛЬНО СОЛНЦА | 2003 |
|
RU2264954C2 |
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2012 |
|
RU2493056C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2014 |
|
RU2569658C2 |
| Многофункциональный космический аппарат | 2016 |
|
RU2640167C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2648520C2 |
| СЛУЖЕБНЫЙ БЛОК КОСМИЧЕСКОЙ ПЛАТФОРМЫ | 2024 |
|
RU2831970C1 |
Изобретение относится к ракетно-космической технике и может быть использовано, в частности, при создании искусственных спутников планет. Предлагаемая конструкция содержит модули, в одном из которых размещена служебная аппаратура, а в остальных - целевая аппаратура и командно-измерительные приборы системы управления космического аппарата (КА). Оптические приборы целевой аппаратуры инфракрасного диапазона с охлаждаемыми элементами установлены в центральном модуле. Радиотехническая аппаратура бортового ретранслятора размещена в боковых модулях, имеющих возможность изменять свое положение относительно центрального модуля. Указанные оптические и командно-измерительные приборы установлены на единой размеростабильной раме с пониженным коэффициентом линейного термического расширения и объединены с центральным модулем через три шарнирные опоры. Охлаждаемые элементы оптических приборов соединены с радиаторами, выносимыми за пределы зоны теплового влияния на них конструкции КА, а на модуле служебной аппаратуры установлены солнечные батареи с пониженным динамическим влиянием на точность стабилизации КА. Кроме них на этом модуле установлены плазменные двигатели с рабочим телом, исключающим загрязнение указанных оптических приборов. Технический результат изобретения направлен на повышение точности стабилизации КА и ориентации осей его оптических приборов, исключение загрязнения “холодной” оптики выхлопом электрореактивных двигателей, электромагнитную совместимость систем и создание дифференцированных условий эксплуатации разной аппаратуры. 3 ил.
Модульная конструкция космического аппарата, содержащая модули бортовой аппаратуры, имеющие возможность изменения своего взаимного положения при выведении в составе ракеты-носителя и при автономном функционировании космического аппарата на орбите, отличающаяся тем, что один из модулей содержит служебную аппаратуру космического аппарата, а остальные модули - целевую аппаратуру и командно-измерительные приборы системы управления космического аппарата, при этом целевая аппаратура установлена в трех модулях: оптические приборы целевой аппаратуры инфракрасного диапазона с охлаждаемыми элементами в центральном модуле, а радиотехническая целевая аппаратура бортового ретранслятора в боковых модулях, имеющих возможность изменять свое положение относительно центрального модуля, причем указанные оптические приборы целевой аппаратуры и командно-измерительные приборы системы управления космического аппарата установлены на единой размеростабильной раме, выполненной из конструкционных материалов с более низким коэффициентом линейного термического расширения, чем у материалов остальной конструкции центрального модуля, и объединены с каркасом центрального модуля через три шарнирные опоры, а указанные охлаждаемые элементы оптических приборов целевой аппаратуры инфракрасного диапазона соединены с радиаторами, выносимыми за пределы зоны теплового влияния на них конструкции космического аппарата при автономном функционировании космического аппарата на орбите, на модуле, содержащем указанную служебную аппаратуру, установлены солнечные батареи с пониженным вредным динамическим влиянием на точность стабилизации космического аппарата за счет жесткости их конструкции и использования привода солнечных батарей с устройством динамической разгрузки или пологим законом нарастания управляющего момента, причем на этом модуле, кроме указанных солнечных батарей, установлены плазменные двигатели с рабочим телом, исключающим загрязнение оптических приборов указанной целевой аппаратуры инфракрасного диапазона с охлаждаемыми элементами.
| US 6220548 А, 24.04.2001 | |||
| US 5806800 А, 15.09.1998 | |||
| УСТРОЙСТВО ДЛЯ ВЫДВИЖЕНИЯ РАБОЧИХ МОДУЛЕЙ КОСМИЧЕСКОГО АППАРАТА | 1997 |
|
RU2136549C1 |
| ДОЛГОВРЕМЕНЫЙ ПИЛОТИРУЕМЫЙ ОРБИТАЛЬНЫЙ ТРОСОВЫЙ КОМПЛЕКС | 1993 |
|
RU2088491C1 |

