Техническое решение относится к области космической техники, конкретно к космическим платформам (далее - КП) формата CubeSat для создания космических аппаратов (далее - КА) микрокласса.
КП формата CubeSat обладают высокой степенью унификации и разработаны на базе единого служебного модуля питания и управления КП. КП CubeSat различных форматов (3U, 6U, 12U, 16U) представляет собой быстро производимый микроспутник, пригодный для решения задач различного назначения. В зависимости от решаемых задач КП может быть адаптирована под требования конкретной полезной нагрузки (далее - ПН). Например, КП может быть оснащена блоком высокоточной трёхосной ориентации. Это позволяет использовать микроспутник, например, для решения задач дистанционного зондирования Земли, создания многоспутниковых созвездий для связи и решения научных и прикладных задач.
Использование КП на базе CubeSat в межпланетных миссиях требует решения ряда проблем, вытекающих из малых размеров наноспутников. Одна из проблем межпланетных полётов - их большая длительность. Очевидно, что ресурса существующих бортовых систем КП на базе CubeSat на перелёт недостаточно. Кроме того, подобные КП обладают слабой защитой от галактического излучения, так как большинство обычных наноспутников работают на низкой орбите под прикрытием электромагнитного излучения Земли. При этом ремонт КП формата CubeSat затрудняет сложная интеграция и де-интеграция электронных плат из состава служебного блока КП без разбора всего КА. Для разбора КА необходимо дополнительное оборудование, большое количество времени, а также работа квалифицированных специалистов. При этом всегда есть риск возникновения повреждений аппарата в процессе разбора и повторной сборки.
Из уровня техники известен модуль служебных систем (патент на изобретение РФ № 2617162, опубл. 21.04.2017), содержащий корпус, размещенные внутри корпуса блоки бортовой служебной аппаратуры, аккумуляторную батарею, двигательную установку, включающую четыре блока двигателей ориентации и стабилизации, и средства крепления модуля к ПН и к переходной ферме последней ступени ракеты-носителя. Корпус модуля выполнен, например, в виде прямой восьмигранной призмы, вдоль боковых ребер которой пропущены продольные стойки, концы которых соединены поперечными силовыми элементами. Пролеты между продольными стойками перекрыты боковыми панелями, закрепленными на продольных стойках и поперечных силовых элементах. Верхние концы продольных стоек выполнены с обеспечением возможности крепления к модулю ПН. Нижние концы продольных стоек выполнены с обеспечением возможности крепления к переходной ферме последней ступени ракеты-носителя, при этом продольные стойки выполнены с профилем в виде таврошвеллера и снабжены поперечными перемычками, боковые панели закреплены на периферийных частях стенок продольных стоек, нижнее основание корпуса перекрыто панелью основания, снабженной тепловыми трубами и закрепленной на кронштейнах, установленных в нижних частях продольных стоек. Панель основания установлена с зазором относительно боковых панелей корпуса. Между кронштейнами продольных стоек и панелью основания размещены амортизаторы. Блоки бортовой служебной аппаратуры размещены на панели основания. Модуль снабжен выполненным в виде усеченной пирамиды пилоном, двумя выполненными в виде удлиненных в поперечном направлении панелей радиаторами-охладителями, снабженной приводом панелью солнечной батареи, а двигательная установка снабжена тремя сферическими топливными баками и шаром-баллоном со сжатым газом, аккумуляторная батарея выполнена в форме моноблока, при этом на четырех накрест расположенных боковых панелях выполнены круговые вырезы, в которые помещены с частичным заглублением внутрь корпуса и закреплены на боковых панелях топливные баки и шар-баллон со сжатым газом. Пилон закреплен своим большим основанием на боковой панели корпуса с охватом шара-баллона со сжатым газом. На первой из других накрест лежащих боковых панелей корпуса закреплен привод панели солнечной батареи, перед второй - закреплена аккумуляторная батарея, а перед третьей - на небольшом удалении от нее на трех продольных планках стержнями, закрепленными вблизи концов продольных стоек корпуса, установлены радиаторы-охладители, упомянутые блоки двигателей ориентации и стабилизации размещены на топливных баках и на меньшем основании упомянутого пилона.
Известен КА (патент РФ на изобретение № 2651309, опубл. 19.04.2018), содержащий корпус, выполненный в форме параллелепипеда, состоящий из боковых панелей корпуса КА, закрепленных на шпангоуте служебной аппаратуры, с разделением внутреннего объема корпуса на две части, а также из верхней панели. На внешних сторонах боковых панелей и верхней панели установлены боковые панели солнечных батарей и верхняя панель солнечной батареи соответственно. Шпангоут служебной аппаратуры является основным силовым элементом, выполненным в виде фрезерованной плиты, на котором с одной стороны установлены блок питания и управления со встроенными GPS-приемником и приемопередатчиком УКВ-диапазона, высокоскоростной передатчик целевой информации Ка-диапазона частот с рупорной антенной, электрические кабели и высокоточные приборы системы управления ориентацией и стабилизацией, установленные на шпангоуте через кронштейн, а с другой стороны указанного шпангоута служебной аппаратуры посредством шпангоута закреплена оптико-электронная система и три двигателя-маховика. Шпангоут оптико-электронной системы выполнен с силовыми ребрами, между которыми размещены на удалении от звездных датчиков и гироскопа двигатели-маховики. Входное отверстие оптико-электронной системы закрыто крышкой камеры, на внешней поверхности которой также расположена панель солнечной батареи. На верхней панели корпуса КА расположены антенны приемопередатчика УКВ-диапазона и GPS-приемника, а по углам боковых панелей со стороны верхней панели и крышки камеры выполнены четыре опорных выступа.
Известна КП (патент EA034254 B1, опубл. 22.01.2020), которая представляет конструктивно и функционально обособленный модуль КА, объединяющий служебные подсистемы, обеспечивающие работу модуля ПН. Основой КП является силовая конструкция корпуса, на которой размещен приборный отсек, при этом торцы силовой конструкции корпуса выступают за плоскости панелей приборного отсека. На торцах силовой конструкции корпуса размещены узлы стыковки с системой отделения, внутри силовой конструкции корпуса расположены баки хранения рабочего тела. Приборный отсек выполнен в виде прямоугольного параллелепипеда, образованного из панелей, причем некоторые из них являются панелями-радиаторами. Внутри и снаружи приборного отсека размещаются приборы и оборудование служебных систем. Снаружи на приборном отсеке размещаются двигатели коррекции, двигатели ориентации, узлы стыковки с ПН, поворотные крылья солнечной батареи, складываемые в стартовом состоянии, закрепленные симметрично с двух противоположных сторон приборного отсека с помощью штанг к устройствам поворота, причем крылья солнечной батареи выполнены в виде плоских панелей, скрепленных между собой. Также на приборном отсеке могут быть размещены двигатели довыведения.
Основным недостатком всех указанных устройств является то, что для замены или ремонта электронных плат, в случае их выхода из строя, необходим разбор всего КА, чему сопутствует нарушение жесткости сборки и повторное использование крепежных механизмов, что может отразиться на прочности всей конструкции.
Наиболее близким к заявляемому техническому решению является служебный спутник (патентная заявка CN 106927065, опубл. 07.07.2017), состоящий из корпуса, являющегося основной несущей конструкцией, сменного модуля, расположенного снаружи корпуса с возможностью замены модуля, стыковочного механизма для приема газожидкостного наполнения на орбите и системы беспроводной связи, управления и обмена данными для использования каждой части платформы, при этом, онлайн доступ и удаление каждого модуля внутри спутника осуществляется использованием беспроводной шины. Ключевым недостатком устройства ограничение его использования, которое распространяется только на беспроводные КП.
Задачей, на решение которой направлено заявляемое изобретение, является создание служебного блока КП с обеспечением простой интеграции и де-интеграции любой платы из его состава, когда любая плата легко извлекается, тестируется отдельно и/или заменяется новой.
Технический результат заявленного изобретения заключается в повышении надежности космических спутников формата CubeSat в процессе их эксплуатации, снижении сроков их изготовления, испытания и монтажа, а также снижение рисков поломки и сроков ремонта их конструктивных элементов.
Технический результат заявленного изобретения достигается за счёт того, что служебный блок КП содержит корпус, внутри которого размещены бортовой комплекс управления, состоящий из бортового вычислительного комплекса, расположенного на печатной плате с установленными на ней микроконтроллером с вычислительной системой, преобразователем напряжения, часами реального времени и таймером, и выполненный с обеспечением возможности взаимодействия по каналу связи с наземным комплексом управления и логической стыковки с системами и приборами указанного служебного блока посредством набора интерфейсов, система управления движением и навигацией, состоящая из гироскопа, солнечного датчика, по меньшей мере одного магнитометра, магнитного исполнительного органа и приемника спутниковой системы навигации со встроенными часами реального времени, система энергоснабжения, состоящая из комплекта солнечных батарей и печатной платы из состава бортового комплекса управления, включающей в себя плату зарядного устройства, по меньшей мере одну плату аккумуляторной батареи и плату преобразования и коммутации линий питания внешних абонентов, и бортового радиокомплекса, состоящего из приемопередающего модуля служебной линии связи УКВ-диапазона, антенно-фидерной системы УКВ-диапазона. Причем плата зарядного устройства состоит из каналов преобразования, к которым подключен комплект солнечных батарей, и включает датчик температуры, датчики тока и напряжения солнечных панелей, датчик напряжения шины первичного электропитания и схему перезагрузки упомянутого служебного блока по внешнему сигналу. На плате аккумуляторной батареи установлен по меньшей мере один нагревательный элемент. Печатные платы бортового комплекс управления, системы управления движением и навигацией, системы энергоснабжения и бортового радиокомплекса установлены на общую печатную плату. Микроконтроллер бортового комплекса управления содержит термодатчик и два ядра, причем одно развернуто относительно другого на 90°C и перевернуто, а в сигналы каждого ядра введена задержка. По меньшей мере два сектора памяти микроконтроллера содержат копии программного обеспечения бортового комплекса управления. Приемопередающий модуль служебной линии связи УКВ-диапазона выполнен с обеспечением возможности работы в полудуплексном режиме. Бортовой радиокомплекс включает раскрывающийся четвертьволновой монополь, расположенный так, чтобы образовывалась равномерная диаграмма направленности в телесном угле 360°C.
В частном случае реализации заявленного технического решения бортовой комплекс управления выполнен с возможностью поддержки интерфейсов UART, и/или R-422, и/или I2C, и/или CAN, и/или 1-wire.
Микроконтроллер бортового комплекса управления может содержать ECC-защиту памяти.
Система управления движением и навигацией может содержать блок двигателей-маховиков.
Система управления движением и навигацией может содержать звездный датчик.
Система управления движением и навигацией может содержать высокоточный интегрирующий гироскоп на базе микромеханического датчика угловых скоростей.
Бортовой радиокомплекс может содержать передатчик Х-диапазона.
На общей печатной плате могут быть установлены светодиоды, сигнализирующие о наличии питания и/или обмена данными по каналу связи с наземным комплексом управления.
В частном случае реализации заявленного технического решения общая печатная плата может содержать дополнительные выводимые каналы и интерфейсы.
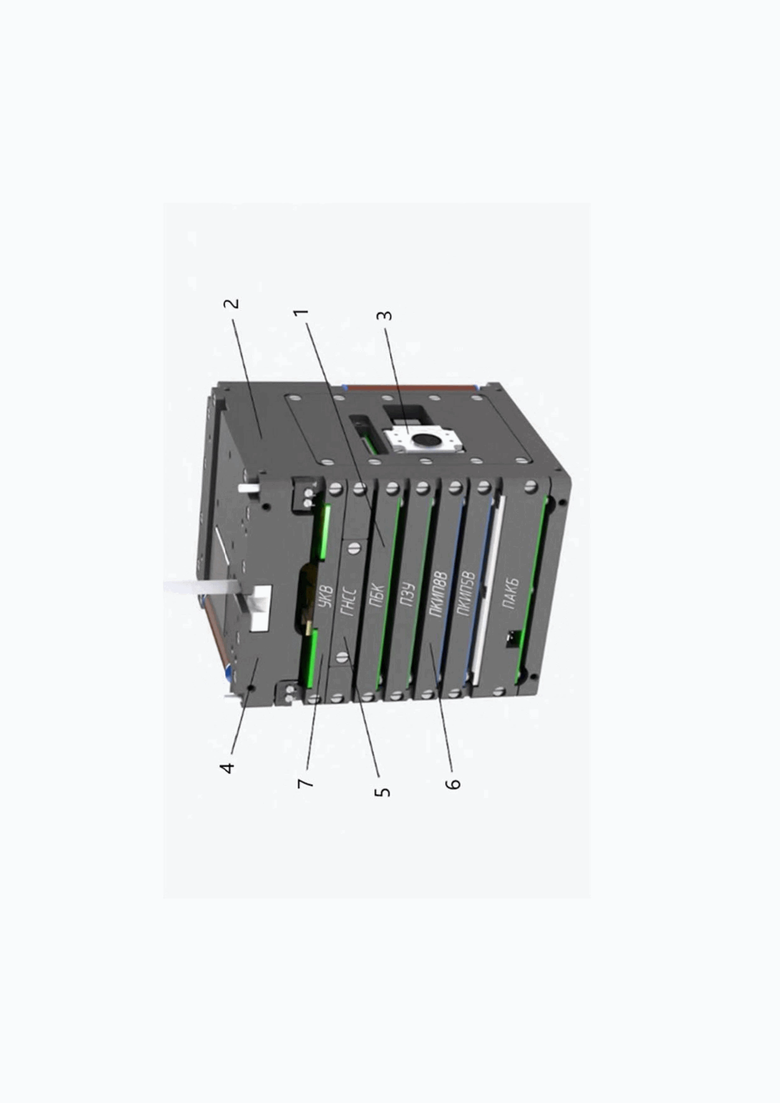
Детали, признаки, а также преимущества настоящего изобретения следуют из нижеследующего описания вариантов реализации заявленного технического решения с использованием иллюстрации (фигуры), на которой показан внешний вид служебного блока КП.
На фигуре обозначены следующие позиции:
1 - бортовой вычислительный комплекс;
2 - гироскоп;
3 - солнечный датчик;
4 - магнитный исполнительный орган;
5 - приемник спутниковой системы навигации;
6 - печатная плата системы энергоснабжения;
7 - печатная плата бортового радиокомплекса.
Служебный блок КП содержит корпус, внутри которого размещены все базовые системы КП, необходимые для её функционирования. В состав служебного блока входят следующие бортовые системы: бортовой комплекс управления (далее - БКУ) с бортовым программным обеспечением (далее - БПО); система управления движением и навигацией (далее - СУДН); система энергоснабжения (далее - СЭС); бортовой радиокомплекс (далее - БРК).
БКУ состоит из печатной платы БКУ и установленного на ней бортового вычислительного комплекса 1 (далее - БВК), включающего микроконтроллер с БПО, преобразователь напряжения, часы реального времени и аппаратный оконный сторожевой таймер. БКУ выполнен с возможностью осуществлять взаимодействие наземного комплекса управления (далее - НКУ) и логической стыковки по каналу связи с системами и приборами служебного блока посредством набора известных интерфейсов. Микроконтроллер БКУ содержит два процессорных ядра с плавающей точкой, работающие синхронно, обеспечивая непрерывное фоновое самотестирование, и цифровой термодатчик, измеряющий температуры ядер средствами встроенного дополнительно на плате БКУ аналогово-цифрового преобразователя (далее - АЦП). Схемотехнически процессорные ядра идентичны. Но их расположение на кристалле относительно друг друга различно. Одно из ядер развернуто относительно другого на 90°C и перевернуто, а в сигналы каждого ядра введена задержка, у одного на входе, у второго на выходе на программно-аппаратном уровне в топологии ядра, таким образом даже физическое воздействие на ядра микроконтроллера, например, тяжелыми заряженными частицами, не внесет сбои, вызванные общей причиной, когда один сбой приводит к одинаковому результату вычислений на выходе обоих ядер, что ошибочно воспримется как отсутствие сбоя. На плате БКУ также размещены два резервированных источника питания ядер микроконтроллера. Измерение напряжения на шине первичного питания осуществляется средствами встроенного АЦП. БПО, установленное на микроконтроллере, выполнено с возможностью обновления своей версии на орбите. На плате БКУ установлена схема перезагрузки КА по внешнему сигналу, например, от БРК по команде с Земли. По меньшей мере два сектора памяти микроконтроллера содержат копии БПО БКУ. БКУ выполнен с возможностью поддержки интерфейсов UART и/или RS422 и/или I2C и/или CAN и/или 1-wire для связи с бортовой аппаратурой БВК. Микроконтроллер БКУ содержит ECC-защиту кэша, flash и SRAM памяти с автоматическим кодированием и декодированием с исправлением ошибок. В плате БКУ рекомендуется использовать высокопроизводительные микроконтроллеры промышленного класса (например, Automotive-Grade) для критичных в части безопасности и надежности приложений. БВК 1, входящий в состав БКУ, предназначен для реализации алгоритмов функционирования, формирования и выдачи управляющих команд, а набор интерфейсов - для логической стыковки БВК 1 со всеми остальными системами и приборами КА.
Микроконтроллер БКУ реализован с архитектурой ARM и включает в себя ряд механизмов, повышающих надежность, которые, при правильном использовании, способны детектировать ошибки и сбои и реагировать на них. В основе обеспечения надежности лежит подход под названием «Островок безопасности» с разбиением архитектуры микроконтроллера БКУ на части. Основная концепция такого принципа заключается в балансе между аппаратной и программной диагностикой для обеспечения надежности функционирования БКУ. Из основного набора элементов микроконтроллера выделяются элементы с непрерывно работающими аппаратными механизмами обеспечения надежности. Этот набор элементов, включающий в себя системы электропитания, тактирования и сброса (схема перезагрузки КА по внешнему сигналу), ядро, flash-память, оперативную память и связанную с ними шину соединений, необходим для гарантированного надежного и корректного выполнения программного кода для начальной инициализации микроконтроллера БКУ, проверки функционирования этих элементов (опрос встроенных аппаратных модулей диагностики), обработки исключительных ситуаций при обнаружении или возникновении сбоя на данном этапе. После подтверждения корректного функционирования этих элементов, можно запустить код, выполняющий проверку остальных элементов микроконтроллера.
СУДН состоит из печатной платы СУДН и установленных на ней гироскопа 2 (трехосного датчика угловых скоростей), солнечного датчика 3, по меньшей мере одного магнитометра, магнитного исполнительного органа 4 (далее - МИО), состоящего из трех магнитных катушек, и приемника спутниковой системы навигации 5 (далее - ССН) со встроенными часами реального времени. СУДН дополнительно, в зависимости от целей запуска КА, содержит блок двигателей-маховиков, звездный датчик, высокоточный интегрирующий гироскоп на базе микромеханического датчика угловых скоростей. Гироскоп, звездный датчик и двигатели-маховики выполняют задачу трехосной ориентации и стабилизация КА (только для КА формата 3U в высокоточном варианте). Магнитометры и МИО выполняют функцию разгрузки двигателей-маховиков и/или демпфирование угловых скоростей после отделения от средства выведения. Приемник ССН (GPS/ГЛОНАСС-приемник) позволяет определять параметры орбиты КА.
СЭС предназначена для обеспечения служебной бортовой аппаратуры и целевой ПН электроэнергией необходимого качества в течение всего срока активного существования изделия и состоит из комплекта солнечных батарей и печатной платы СЭС 6 из состава БКУ, включающей в себя плату зарядного устройства, по меньшей мере одну плату литий-ионной аккумуляторной батареи (далее - АКБ) и плату преобразования и коммутации линий питания внешних абонентов. Указанные платы установлены параллельно в несущую плату и закреплены в отдельных рамках на корпусе КА. Плата зарядного устройства состоит из каналов преобразования, к которым подключен комплект солнечных батарей, и включает датчик температуры, датчики тока и напряжения панелей солнечных батарей, датчик напряжения шины первичного электропитания из состава БКУ и схему перезагрузки служебного блока по внешнему сигналу. На плате АКБ установлен по меньшей мере один нагревательный элемент. Количество нагревательных элементов зависит от количества элементов питания. Управление устройствами, расположенными на платах СЭС, осуществляется микроконтроллером БВК средствами БПО.
БРК состоит из печатной платы БРК 7 и установленных на ней приемопередающего модуля служебной линии связи УКВ-диапазона и антенно-фидерной системы (далее - АФС) УКВ-диапазона. Приемопередающий модуль служебной линии связи УКВ-диапазона выполнен с обеспечением возможности работы в полудуплексном режиме, что приводит к возможности использования одной УКВ-антенны как для приёма, так и для передачи информации. Основным требованием к АФС служебного канала является обеспечение полного сектора обзора посредством штыревой антенны для обеспечения устойчивого канала связи с НКУ при произвольной ориентации КА. БРК также включает раскрывающийся четвертьволновой монополь, расположенный так, чтобы образовывалась равномерная диаграмма направленности в телесном угле 360°С. Раскрывающийся монополь используется для того, чтобы КА можно было легко поместить в транспортно-пусковой контейнер, когда монополь находится в сложенном состоянии. При отсоединении от космического корабля в космосе, монополь раскрывается. БРК содержит высокоскоростной передатчик Х-диапазона для передачи на НКУ большого потока целевой информации от ПН. В качестве антенны Х-диапазона применяется массив патч-антенн с круговой поляризацией. Указанный комплект элементов БРК обеспечивает выполнение следующих задач: передача на НКУ данных телеметрической информации, приём на КА, поступающих от НКУ командно-программной информации, информационный обмен с БКУ КА в части телеметрической и командно-программной информации.
Платы БКУ, СУДН, СЭС и БРК установлены на общую несущую плату, через которую уже непосредственно идёт подключение всех внешних абонентов. На несущей плате установлены светодиоды, сигнализирующие о наличии питания на служебном модуле и/или обмена данными по основному I2C каналу с НКУ. Несущая плата может содержать дополнительные выводимые каналы и интерфейсы для обеспечения целей миссии и подключения специфичной ПН. Платы БКУ, СЭС, СУДН и БРК крепятся к корпусу КА независимо от остальных узлов и механизмов. У каждой из указанных плат есть свой механизм крепления и свой интерфейс соединения с остальными электрическими платами КП. Таким образом, если какая-либо плата выйдет из строя, ее можно легко отсоединить, не нарушая герметичности конструкции КА и заменить на новую или отремонтировать.
При изготовлении служебного блока КП основные элементы его корпуса, а также крепления для используемых приборов и печатных плат выполняются из металлических сплавов (например, алюминиевых) с использованием известных методов механического производства. Конструктив служебного блока, интерфейс взаимодействия, протокол обмена информацией выполнены с возможностью как проводного, так и беспроводного соединения элементов.
Сборку элементов корпуса и креплений для приборов и печатных плат проводят с использованием сварки и разъемных соединений. На плате БКУ размещают известным способом микроконтроллер, преобразователь напряжения, часы реального времени, аппаратный оконный сторожевой таймер, резервные источники питания и АЦП. Размещают АКБ, зарядное устройство, преобразователь и коммутатор линий питания внешних абонентов на соответствующих платах, которые затем параллельно устанавливают на плате СЭС 6 известным способом. На плате СУДН размещают МИО 4. На плате БРК устанавливают приемопередающий модуль служебных линия связи, АФС, монополь и передатчик Х-диапазона. Печатные платы БКУ, СЭС, СУДН, БРК устанавливают и закрепляют на общей несущей плате. В крышку служебного блока КП устанавливают приемник ССН 5, гироскоп 2, УКВ-антенну, солнечный датчик 3.
При выведении КА на орбиту искусственного спутника Земли силовая конструкция КА воспринимает инерционные нагрузки. После выведения КА на рабочую орбиту силовые связи между платформой модуля ПН и платформой служебного блока КП устраняются известным способом. Также после выведения КА на орбиту происходит раскрытие комплекта солнечных батарей и УКВ-антенн, которые переводятся в рабочее положение, и КА переходит в режим демпфирования угловых скоростей, полученных в момент отделения от пилотируемого космического корабля, средствами МИО. После стабилизации КА переходит в дежурный режим работы по звездным датчикам и гироскопу в качестве измерительных приборов и двигателям-маховикам в качестве исполнительных органов, при их наличии. В данном режиме строится трехосная ориентация, когда оптическая ось КА направлена в направлении надира. Разгрузка накопленного кинетического момента на двигателях-маховиках осуществляется средствами МИО. Проведя все подготовительные и проверочные операции со служебными бортовыми системами, КА может переходить к выполнению целевой задачи по дистанционному зондированию Земли.
БКУ обеспечивает управление всеми бортовыми системами КА по автономной программе и по командам НКУ с автоматическим контролем их исполнения и парированием обнаруженных неисправностей заранее предусмотренными алгоритмами. При невозможности парирования - БКУ переводит КА в безопасный режим функционирования до поступления команд с НКУ.
Одно ядро микроконтроллера БКУ является основным и его результаты вычислений используются БПО. Второе ядро является проверочным. Результат вычисления первого ядра сравнивается с проверочным встроенным модулем проверки, являющимся частью БПО. В случае несовпадения результатов в модуле сигнализации о неисправности выставляется соответствующий флаг и генерируется соответствующее прерывание.
Процессор загружает код инициализации и проверки ядра, памяти и периферии микроконтроллера и, в случае успешного выполнения проверки, переходит к выполнению БПО, хранящегося во flash-памяти микроконтроллера БКУ.
Если в результате самотестирования не были выявлены ошибки, то загружается операционная система реального времени и комплекс задач БПО. Каждая версия БПО хранится во flash-памяти микроконтроллера в нескольких копиях. При начальной загрузке осуществляется попытка загрузки первой версии БПО, если по каким-либо причинам данная загрузка не может быть произведена (например, неустранимая ошибка в данных, возникшая при воздействии внешних факторов), автоматически осуществляется загрузка дублирующей версии БПО.
При необходимости, БПО может быть перезаписано с помощью команды с НКУ. Для этого в составе командной информации с НКУ на КА поступает информация, содержащая новую версию БПО. Для записи во flash-память новой версии БПО используется соответствующее программное обеспечение, функционирующее в составе БПО. Перепрограммирование в полете заменяет вначале одну, а затем, после успешной загрузки новой версии, и остальные версии ПО.
Бортовое питание автоматически подается по сигналу контактов отделения, фиксирующих выход КА из транспортно-пускового контейнера. После размыкания контактов отделения формируется основная служебная шина питания от платы АКБ, от которой подпитываются главный процессор БВК и устройства плат СЭС из БВК, а также БРК.
Задача СЭС из состава БПО КА начинает автоматическое управление функциями заряда/разряда АКБ и опрос телеметрии СЭС. Дальнейшая коммутация бортовой аппаратуры осуществляется согласно логике функционирования КА и заложенным перед запуском циклограммам работы. Кроме того, команды на включение (или выключение) того или иного устройства могут быть переданы в процессе сеанса радиосвязи с КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космический аппарат дистанционного зондирования Земли микрокласса | 2017 |
|
RU2651309C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| КОНСТРУКЦИЯ УНИФИЦИРОВАННОЙ КОСМИЧЕСКОЙ ПЛАТФОРМЫ, ОРИЕНТИРОВАННОЙ НА АВТОМАТИЗИРОВАННУЮ СБОРКУ | 2024 |
|
RU2825163C1 |
| Многоцелевая модульная платформа для создания космических аппаратов нанокласса | 2021 |
|
RU2762452C1 |
| Спутник-конструктор - учебно-демонстрационная модель | 2017 |
|
RU2693722C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| Метод передачи информации из космоса и устройство для его осуществления | 2020 |
|
RU2755444C1 |
| УНИФИЦИРОВАННАЯ КОСМИЧЕСКАЯ ПЛАТФОРМА МОДУЛЬНОГО ПРИНЦИПА ПОСТРОЕНИЯ | 2018 |
|
RU2684877C1 |
| СПОСОБ РАЗГРУЗКИ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА С СОЗДАВАЕМЫМ МАГНИТНЫМ МОМЕНТОМ | 2014 |
|
RU2580593C2 |
| СПОСОБ ТЕСТИРОВАНИЯ КАНАЛА УПРАВЛЕНИЯ БОРТОВОЙ АППАРАТУРОЙ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2653670C1 |
Изобретение относится к области космической техники, конкретно к космическим платформам формата CubeSat. Служебный блок космической платформы содержит корпус, бортовой комплекс управления, систему управления движением и навигацией, систему энергоснабжения и бортовой радиокомплекс. Плата зарядного устройства состоит из каналов преобразования, к которым подключен комплект солнечных батарей, и включает датчик температуры, датчики тока и напряжения солнечных панелей, датчик напряжения шины первичного электропитания и схему перезагрузки служебного блока по внешнему сигналу. На плате батареи установлен нагревательный элемент. Микроконтроллер содержит термодатчик и два ядра, причем одно развернуто относительно другого на 90°C и перевернуто, а в сигналы каждого ядра введена задержка. Секторы памяти микроконтроллера содержат копии программного обеспечения. Приемопередающий модуль служебной линии связи УКВ-диапазона работает в полудуплексном режиме. Бортовой радиокомплекс включает раскрывающийся четвертьволновой монополь, образующий равномерную диаграмму направленности в телесном угле 360°C. Достигается повышение надежности космических спутников формата CubeSat в процессе их эксплуатации, снижение сроков их изготовления, испытания и монтажа. 8 з.п. ф-лы, 1 ил.
1. Служебный блок космической платформы, содержащий корпус, внутри которого размещены бортовой комплекс управления, состоящий из бортового вычислительного комплекса, расположенного на печатной плате с установленными на ней микроконтроллером с вычислительной системой, преобразователем напряжения, часами реального времени и таймером, и выполненный с обеспечением возможности взаимодействия по каналу связи с наземным комплексом управления и логической стыковки с системами и приборами указанного служебного блока посредством набора интерфейсов, система управления движением и навигацией, состоящая из гироскопа, солнечного датчика, по меньшей мере одного магнитометра, магнитного исполнительного органа и приемника спутниковой системы навигации со встроенными часами реального времени, система энергоснабжения, состоящая из комплекта солнечных батарей и печатной платы из состава бортового комплекса управления, включающей в себя плату зарядного устройства, по меньшей мере одну плату аккумуляторной батареи и плату преобразования и коммутации линий питания внешних абонентов, и бортовой радиокомплекс, состоящий из приемопередающего модуля служебной линии связи УКВ-диапазона, антенно-фидерной системы УКВ-диапазона, причем плата зарядного устройства состоит из каналов преобразования, к которым подключен комплект солнечных батарей, и включает датчик температуры, датчики тока и напряжения солнечных панелей, датчик напряжения шины первичного электропитания и схему перезагрузки упомянутого служебного блока по внешнему сигналу, на плате аккумуляторной батареи установлен по меньшей мере один нагревательный элемент, печатные платы бортового комплекса управления, системы управления движением и навигацией, системы энергоснабжения и бортового радиокомплекса установлены на общую печатную плату, микроконтроллер бортового комплекса управления содержит термодатчик и два ядра, причем одно развернуто относительно другого на 90° и перевернуто, а в сигналы каждого ядра введена задержка, по меньшей мере два сектора памяти микроконтроллера содержат копии программного обеспечения бортового комплекса управления, приемопередающий модуль служебной линии связи УКВ-диапазона выполнен с обеспечением возможности работы в полудуплексном режиме, бортовой радиокомплекс включает раскрывающийся четвертьволновой монополь, расположенный так, чтобы образовывалась равномерная диаграмма направленности в телесном угле 360°.
2. Служебный блок космической платформы по п.1, отличающийся тем, что бортовой комплекс управления выполнен с возможностью поддержки интерфейсов UART, и/или R-422, и/или I2C, и/или CAN, и/или 1-wire.
3. Служебный блок космической платформы по п.1, отличающийся тем, что микроконтроллер бортового комплекса управления содержит ECC-защиту памяти.
4. Служебный блок космической платформы по п.1, отличающийся тем, что система управления движением и навигацией содержит блок двигателей-маховиков.
5. Служебный блок космической платформы по п.1, отличающийся тем, что система управления движением и навигацией содержит звездный датчик.
6. Служебный блок космической платформы по п.1, отличающийся тем, что система управления движением и навигацией содержит высокоточный интегрирующий гироскоп на базе микромеханического датчика угловых скоростей.
7. Служебный блок космической платформы по п.1, отличающийся тем, что бортовой радиокомплекс содержит передатчик Х-диапазона.
8. Служебный блок космической платформы по п.1, отличающийся тем, что на общей печатной плате установлены светодиоды, сигнализирующие о наличии питания и/или обмена данными по каналу связи с наземным комплексом управления.
9. Служебный блок космической платформы по п.1, отличающийся тем, что общая печатная плата может содержать дополнительные выводимые каналы и интерфейсы.
| Космический аппарат дистанционного зондирования Земли микрокласса | 2017 |
|
RU2651309C1 |
| CN 106927065 A, 07.07.2017 | |||
| МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2015 |
|
RU2621221C1 |
| МНОГОЦЕЛЕВАЯ СЛУЖЕБНАЯ ПЛАТФОРМА ДЛЯ СОЗДАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 2008 |
|
RU2375267C1 |
| 0 |
|
SU210165A1 | |
| CN 107985631 B, 26.01.2024. | |||

