Изобретение относится к измерительной технике и может быть использовано для измерения линейных и угловых перемещений объекта.
Развитие высоких технологий предъявляет к преобразователям перемещений постоянно растущие требования, касающиеся их точности, надежности и эргономичности. Такие требования к преобразователям перемещений успешно удовлетворяются в оптико-электронных растровых преобразователях перемещений.
Известны квазиабсолютные датчики линейных и угловых перемещений (см. Рекламные проспекты. Приложения 1 и 2 к настоящей заявке), содержащие растровую шкалу, узел считывания, включающий осветитель, анализирующую маску и фотоприемники. В этих датчиках используется однодорожечный код, позволяющий осуществлять координатную привязку узла считывания по отношению к растровой шкале (координатной шкале), то есть в датчиках используется одно считывающее фотоприемное окно, имеющее ширину, равную шагу кода.
В связи с этим для выявления кода положения узла считывания после включения питания датчика требуется осуществлять перемещение последнего на величину, соответствующую разрядности используемого кода.
Известен преобразователь угол-код (см. описание изобретения к авт. св. СССР №1474843, кл. Н 03 М 1/ 24, опубл. в 1989 г.), в котором уменьшение необходимой величины указанного смещения считыванияе сигналов достигается применением ряда фотоприемных окон, количество и расположение которых определяется разрядностью используемого кода.
Однако, даже в этом случае, необходимость предварительного перемещения узла считывания не устраняется, хотя его величина смещения резко уменьшается. Это связано с эффектом неоднозначности считывания кода положения узла считывания фотоприемными окнами анализирующей маски.
Неоднозначность считывания координатного кода может возникнуть в случае “критического” расположения границы кодового окна относительно центра одного из анализирующих окон, то есть когда не удается надежно присвоить сигналу соответствующего фотоприемника значение “0” или “1”. Поэтому для устранения неоднозначности считывания координатного кода приходится осуществлять дополнительно смещение анализирующей маски, то есть смещение узла считывания.
Это обстоятельство делает обязательным указанное смещение при определении координатного кода после включения преобразователя перемещения, что в ряде случаев бывает недопустимым.
Указанный недостаток устраняет датчик положения, известный из патента США №5235181, кл. G 01 D 5/34, опубл. В 1993 г., и выбранный в качестве прототипа к заявляемому оптико-электронному преобразователю положение-код.
Этот датчик положения содержит координатную шкалу с растровой и кодовой дорожками, первая из которых выполнена в виде последовательности окон, образующих регулярный растр, а вторая дорожка выполнена в виде кодовой последовательности окон, узел считывания, включающий осветитель, проекционную линзу, изображающую подсвеченную дорожку кодовых окон на фоточувствительную поверхность ПЗС (многоэлементный фотоприемник), растровую анализирующую маску, образующую оптическое растровое сопряжение с растровой дорожкой координатной шкалы, и расположенные за ней соответствующие фотоприемники, а также содержит регистрирующий и анализирующий блоки. ПЗС приемник в данном датчике положения формирует видеосигнал, представляющий собой последовательность униполярных импульсов, огибающая которых адекватна распределению освещенности на его фоточувствительной поверхности. Таким образом, видеосигнал полностью представляет текущее изображение участка кодовой дорожки в координатах линейки ПЗС.
Анализ видеосигнала соответствующего координатному коду позволяет определить положение узла считывания при устранении неоднозначности считывания кодовой информации.
Однако к недостаткам датчика положения следует отнести увеличение его габаритов за счет использования проекционной линзы и снижение точности его работы за счет удаленности ПЗС приемника от координатной шкалы. Последнее приводит к сдвигу изображения кодовой дорожки на ПЗС при наличии возможных угловых смещений узла считывания относительно координатной шкалы, которые могут быть вызваны технологическими погрешностями каретки узла считывания, осуществляющей его перемещение вдоль координатной шкалы. Максимальная величина указанных смещений при условии решения задачи неоднозначности считывания ограничивает величину минимального шага регулярного растра и, как следствие, потенциальную точность датчика положения.
Недостатком этого датчика является также и снижение его быстродействия за счет необходимости последовательного вывода сигналов большого количества фотоприемных элементов.
В предлагаемом изобретении решается задача устранения неоднозначности считывания координатного кода при статическом начальном положении объекта измерений при одновременном повышении быстродействия, уменьшении габаритов и увеличении потенциальной точности оптико-электронного преобразователя положение-код.
Для достижения технического результата в оптико-электронном преобразователе положение-код, содержащем координатную шкалу с растровой и кодовой дорожками, первая из которых выполнена в виде последовательности окон, образующих регулярный растр, а вторая дорожка выполнена в виде кодовой последовательности окон, узел считывания, включающий осветитель, растровую анализирующую маску, выполненную в виде отдельных звеньев регулярных растровых окон и оптически сопряженную с растровой дорожкой координатной шкалы, фотоприемники растровой дорожки, расположенные за растровой анализирующей маской, и многоэлементный фотоприемник, при этом фотоприемники растровой дорожки и многоэлементный фотоприемник кодовой дорожки подключены соответственно к регистрирующему и анализирующему блокам, узел считывания снабжен кодовой анализирующей маской, представляющей собой две дорожки окон, расположенных с периодом следования, кратным шагу кода, и шириной каждого окна, равной шагу кода, причем окна дорожек кодовой анализирующей маски взаимно сдвинуты на величину, равную половине шага кода, а начальные пространственные фазы растровой анализирующей маски и одной из дорожек кодовой анализирующей маски совмещены, общая ширина дорожек кодовой анализирующей маски меньше высоты окон кодовой дорожки координатной шкалы, при этом многоэлементный фотоприемник расположен за кодовой анализирующей маской, оптически сопряженной с кодовой дорожкой координатной шкалы, и выполнен в виде двух раздельных линеек фотоприемных элементов, каждая из которых соответствует определенной дорожке кодовой анализирующей маски, осветитель узла считывания выполнен в виде светодиода, установленного в фокальной плоскости конденсора, а растровая и кодовая анализирующие маски выполнены в виде единой детали.
Новым в предлагаемом изобретении является:
- наличие кодовой анализирующей маски, оптически сопряженной с кодовой дорожкой координатной шкалы;
- выполнение кодовой анализирующей маски в виде двух дорожек окон, расположенных с периодом следования, кратным шагу кода, и шириной каждого окна, равной шагу кода;
- выполнение окон одной дорожки относительно окон другой дорожки со сдвигом, равным половине шага кода;
- совмещение начальных пространственных фаз растровой анализирующей маски и одной из дорожек кодовой анализирующей маски;
- общая ширина дорожек кодовой анализирующей маски меньше высоты окон кодовой дорожки координатной шкалы;
- выполнение многоэлементного фотоприемника, расположенного за кодовой анализирующей маской, в виде двух раздельных линеек фотоприемных элементов, соответствующих дорожкам кодовой анализирующей маски.
Совокупность существенных признаков позволила в предлагаемом изобретении наряду с устранением неоднозначности считывания координатного кода при статическом начальном положении объекта измерений:
- повысить быстродействие преобразователя за счет резкого уменьшения количества опрашиваемых фотоприемных элементов с возможностью их параллельного опроса;
- повысить потенциальную точность преобразователя благодаря тому, что кодовая анализирующая маска расположена в непосредственной близости от координатной шкалы, что практически исключает влияние угловых смещений каретки узла считывания на потенциальную точность;
- уменьшить габариты преобразователя за счет того, что предложенная конструкция позволяет исключить использование проекционной линзы.
В результате этого можно сделать вывод о том, что предлагаемое изобретение позволяет получить технический результат.
Изобретение является новым, так как из уровня техники по доступным источникам информации не выявлено аналогов с подобной совокупностью признаков.
Изобретение является промышленно применимым, так как может быть использовано во всех областях, где требуется высокоточное позиционное определение объекта.
Предлагаемое изобретение поясняется чертежами, где
на фиг.1 представлена структурная схема оптико-электронного преобразователя положение-код;
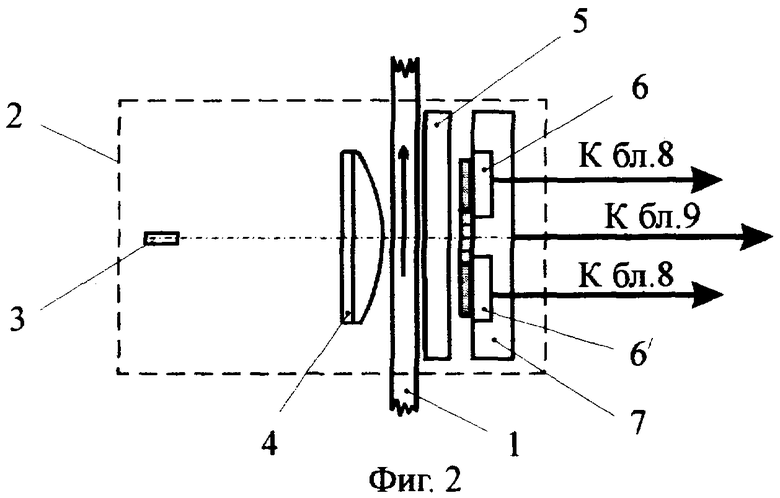
На фиг.2 - узел считывания в разрезе В-В;
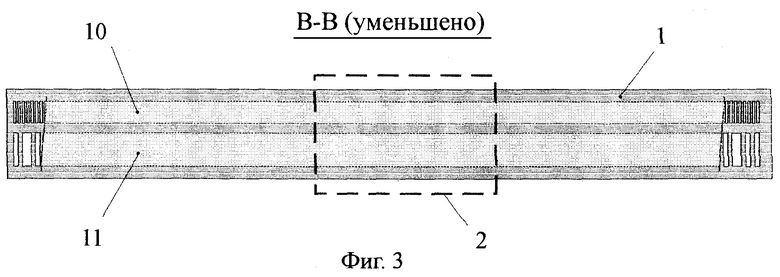
На фиг.3 - координатная шкала и узел считывания в разрезе В-В;
На фиг.4 - фрагмент координатной шкалы;
На фиг.5 - фрагмент анализирующей маски, включающей растровую и кодовую анализирующие маски;
На фиг.6 - анализирующая маска и многоэлементный фотоприемник.
Заявляемый оптико-электронный преобразователь положение-код (фиг.1, 2) содержит координатную шкалу 1, узел считывания 2, состоящий из оптически сопряженных светодиода 3, конденсора 4, анализирующей маски 5, фотоприемников растровой дорожки 6 и многоэлементного фотоприемника кодовой дорожки 7. Светодиод 3 и конденсор 4 образуют осветитель. Анализирующая маска 5 включает в себя растровую и кодовую анализирующие маски. Фотоприемники растровой дорожки 6 и многоэлементный фотоприемник кодовой дорожки 7 соединены соответственно с регистрирующим блоком 8 и анализирующим блоком 9. Блоки 8 и 9 соединены между собой.
Координатная шкала 1 (фиг.3, 4) имеет растровую 10 и кодовую 11 дорожки. Растровая дорожка 10 выполнена в виде последовательности окон, образующих регулярный растр. Кодовая дорожка 11 выполнена в виде кодовой последовательности окон.
Анализирующая маска 5 (фиг.5) представляет собой растровую анализирующую маску, выполненную в виде отдельных звеньев 12 и 12'регулярных растровых окон, и кодовую анализирующую маску, выполненную в виде двух дорожек 13 и 13'.
Окна дорожек 13 и 13’ кодовой анализирующей маски (фиг.5) расположены с периодом к L, кратным шагу кода L (фиг.4), и шириной каждого окна, равной L (шагу кода). Окна дорожек 13 и 13' (фиг.5) кодовой анализирующей маски взаимно сдвинуты на величину, равную L/2 (половине шага кода).
Начальные пространственные фазы в звеньях 12 и 12' растровой анализирующей маски взаимно смещены на величину, равную π/2, то есть L/4.
Начальные пространственные фазы растровой анализирующей маски - звено 12 и дорожки 13 кодовой анализирующей маски совмещены (фиг.5).
Общая ширина “ b'” дорожек 13 и 13' кодовой анализирующей маски (фиг.5) меньше высоты “b” окон кодовой дорожки 11 координатной шкалы 1 (фиг.4). Многоэлементный фотоприемник 7 кодовой дорожки (фиг.6) выполнен в виде двух раздельных линеек 14 и 14' фотоприемных элементов, каждая из которых соответствует определенной дорожке 13 и 13' (фиг.5, 6) кодовой анализирующей маски, а каждый фотоприемник 6 и 6' растровой дорожки соответствует определенному звену 12 и 12' регулярных растровых окон растровой анализирующей маски.
Существо работы преобразователя заключается в том, чтобы достоверно определить, находится ли пространственная фаза кодовой дорожки 11 по отношению к нулевой фазе кодовой анализирующей маски в пределах величины, равной L/4.
Если это условие выполняется, то следует принимать в обработку сигналы фотоприемных элементов, соответствующих линейке 13 кодовой анализирующей маски. В противном случае декодированию должны подвергаться сигналы фотоприемных элементов линейки 13'.
Указанная информация формируется с помощью анализирующего звена растровых окон 12 и 12' соответствующих дорожке регулярного растра 10 координатной шкалы 1.
В указанных окнах нанесены растры, имеющие одинаковый шаг, равный шагу регулярного растра 10, но смещенные друг относительно друга на величину пространственной фазы, равную π/2, то есть на четверть шага растра. При этом фазы растра одного из окон совмещены с нулевой фазой дорожки 13 кодовой анализирующей маски.
При статическом положении элементов преобразователя сравнение сигналов U0 и U90, снимаемых соответственно с фотоприемников растровой дорожки 6 и 6', сопряженных с упомянутыми окнами, позволяет принять решение об использовании той или иной дорожки 13 и 13' кодовой анализирующей маски, то есть осуществлять считывание с фотоприемных элементов соответствующей линейки 14 и 14' многоэлементного фотоприемника 7.
Указанное сравнение осуществляется регистрирующим блоком 8. Результат сравнения подается в анализирующий блок 9, который осуществляет опрос фотоприемных элементов выбранной линейки 14 или 14’ и формирование кода положения узла считывания 2 и его декодирование.
Полученная информация соответствует положению узла считывания 2 относительно координатной шкалы 1 с точностью до L/2.
Уточнение координатной информации осуществляется с помощью обработки ортогональных сигналов фотоприемников 6 и 6’ стандартным интерполятором, в качестве которого может быть использована, например, микросхема iC-NG (см. каталог немецкой фирмы “iC-Haus". Приложение 3 к настоящей заявке), входящим в состав регистрирующего блока 8.
Суммирование данных грубого и точного отсчетов и формирование результатов в необходимом формате данных осуществляется анализирующим блоком 9, выход которого является выходом преобразователя.
Таким образом, предлагаемое изобретение позволяет устранить неоднозначность считывания координатного кода при статическом начальном положении объекта измерений и одновременно повысить быстродействие, уменьшить габариты и увеличить потенциальную точность преобразователя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрическая растровая система | 1969 |
|
SU340330A1 |
| Фотоэлектрический растровый датчик угловых пермещений | 1976 |
|
SU765650A1 |
| КОДОВАЯ ШКАЛА | 2014 |
|
RU2560782C1 |
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| Фотоэлектрический измерительный преобразователь перемещений | 1981 |
|
SU1044967A1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| УСТРОЙСТВО для ШАГОВОГО ПЕРЕЛ1ЕЩЕНИЯ РАБОЧИХ ОРГАНОВ | 1972 |
|
SU326570A1 |
| Фотоэлектрический преобразователь перемещения в код | 1990 |
|
SU1780190A1 |
| Преобразователь с электрооптической редукцией | 1981 |
|
SU966722A1 |
| КОДОВАЯ ШКАЛА | 2012 |
|
RU2490790C1 |



Оптико-электронный преобразователь положение-код содержит координатную шкалу с растровой и кодовой дорожками, первая из которых выполнена в виде последовательности окон, образующих регулярный растр, а вторая дорожка выполнена в виде кодовой последовательности окон, узел считывания, включающий осветитель, растровую анализирующую маску, фотоприемники растровой дорожки и многоэлементный фотоприемник кодовой дорожки. Фотоприемники растровой дорожки и многоэлементный фотоприемник кодовой дорожки подключены соответственно к регистрирующему и анализирующему блокам. При этом узел считывания снабжен кодовой анализирующей маской, представляющей собой две дорожки окон, расположенных с периодом следования, кратным шагу кода, и шириной каждого окна, равной шагу кода, причем окна дорожек кодовой анализирующей маски взаимно сдвинуты на величину, равную половине шага кода. Технический результат - устранение неоднозначности считывания координатного кода, повышение быстродействия, уменьшение габаритов и увеличение точности. 2 з.п. ф-лы, 6 ил.

| US 5235181 A, 10.08.1993 | |||
| US 4442351 A, 10.04.1984 | |||
| Приспособление для очистки сетчатых барабанов трепальных машин | 1939 |
|
SU58302A1 |
| Оптико-электронный преобразователь угла | 1976 |
|
SU611109A1 |

