Изо-бретение отиосится к системном автоматического управления, может быть использовано в запо.минающ.ихся устройствах на сменных магнитных дисках и в различных системах, в которых рабочие органы должны быть установлены в фиксирова-нные положения с высокой точностью.
Известны устройства для шагового перемещения рабочих органов, например блоков магнитных голов.ок, в запоминающих устройствах на магнитных дисках, содержащие привод с узлом управления и кареткой, на которой укреплена шкала 1 змерительного фотоэлектрического преобразователя с растровыми дорожками, фотоприе.мникп и установленную перед кареткой неподвижную шкалу диафрагмы.
Известные устройства недостаточно точны.
Предложенное устройство отличается тем, что один из фотоприемникив установлен перед центральной растровой дорожкой шкалы фотоэлектрического преобразователя, на осевых линиях которой, соответствующих фиксированному положению каретки, выполнены щели. Выход этого фотоприемника подключен через реверсивный счетчик к одному из входов узла управления пр иводом, а два других фотоприемника соединены по фотобалансной схеме, подключены через усилитель ко второму входу узла управления приводом
И установлены перед двумя другими растровыми дорожками щкалы фотоэлектрического преобразователя, по обе стороны от осевых линий дорожек которого выполнены щели.
Это позволяет повысить точность и быстродействие устройства.
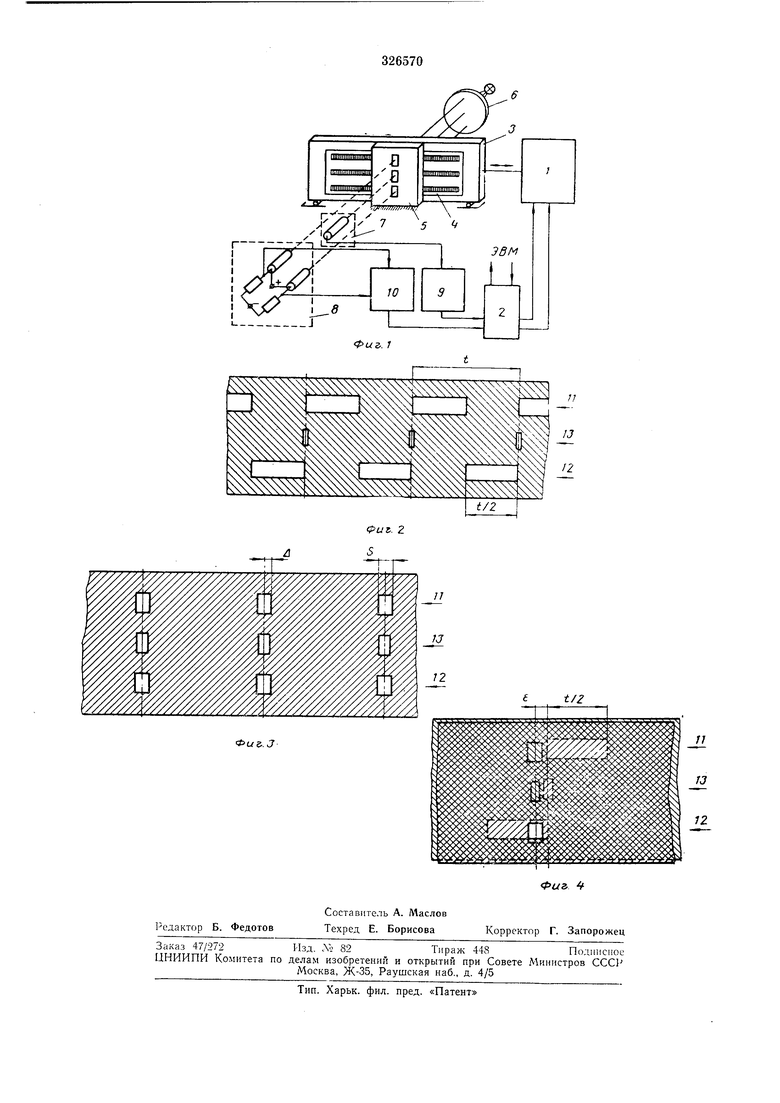
На фиг. 1 показан схематический чертеж с блок-схемой устройства; на фиг. 2-основная подвижная шкала устройства; на фиг. 3 - щкала анализирующей щели (диаф-рагмы); на фиг. 4 проиллюстрпровано сопряжение щкал фотодатчпка при рассогласовании.
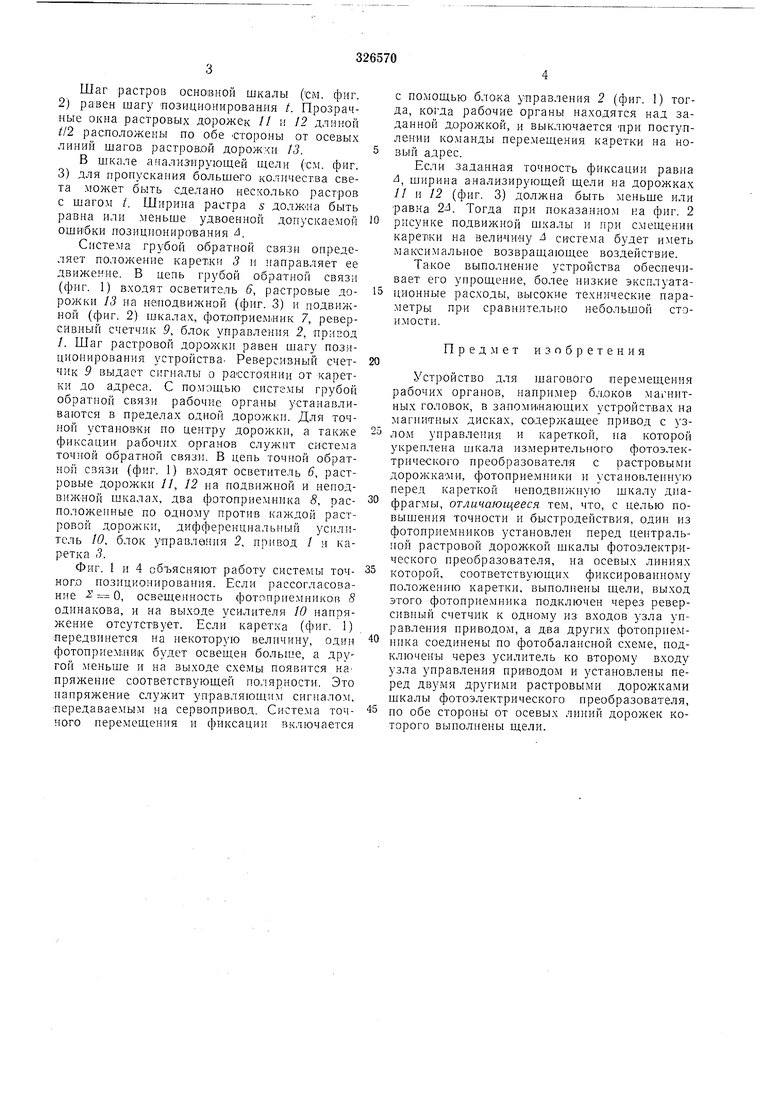
Привод /, управляемый блоком управления 2, передает возвратно-поступательное движение кзретке 3, служащей для крепления рабочих элементов (например, блока .магнитных го.-ювок), подвижного звена измерительного преобразователя обратной связи 4, напротив которого прикреплена щкала диафрагмы 5, так, чтобы растровые дорожки обеих щкал совпали. С одной стороны щкал расположен осветитель 6, а с другой напротив каждой растровой дорон ки установлены фотоприемники 7 и 8. Фотопрпемник 7 является чувствительным элементом реверсив1 ого счетчика 9, который соединен с блоком управления 2, а фот.апряемники 8, соединенные по фотобалансной схеме, подключенной к усиЛИтелю 10, расположены по однОМу на против растровых дорожек // и /2 (фиг. 2 и 3). Шаг растров осно1вной шкалы (см. фиг. 2)равен шагу позидионирования /. Прозрачные окна растровых дорожек // и 12 длиной tl2 расположены по обе стороны от осевых линий шагов растровлй дорожки 13. В шкале амализирующей ш:ели (см. фиг. 3)для пропускания большего количества света может быть сделано несколько растров с шагом /. Ширина растра s долЖНа быть равна или меньше удвоенной допускаемой ошибки позиционирования Л, Система грубой обратной связи определяет положение каретки 3 и направляет ее движение. В цепь грубой обратной связи (фиг. 1) входят осветитель 5, растро вые дорожки 13 на неподвижной (фиг. 3) и подвижной (фиг. 2) шкалах, фот.олрием/ник 7, реверсивный счетчик 9, блок управления 2, привод /. Шаг растровой дорожки равен шагу позиционирования устройства- Реверсивный счетчик 9 выдает сигналы о ра сстоянии от каретки до адреса. С помощью системы грубой обратной связи рабочие органы устанавливаются в пределах одной дорожки. Для точной установки по центру дорожки, а также фиксации рабочих органов служит система точной обратной связи. В цепь точной обратной связи (фиг. 1) входят осветитель 6, растровые дорож.ки 11, 12 на подвижной и неподвижной шкалах, два фотоприемнпка 8, расположепные по одному против каждой растровой дорожки, дифференциальный усилитель 10, блок управления 2, привод / и каретка 3. Фиг. 1 и 4 объясняют работу системы точног.о позиционирования. Если рассогласование -2 0, освещенность фотопрпемников 8 одинакова, и на выходе усилителя 10 напряжение отсутствует. Если каретка (фиг. 1) передвинется на некоторую велпчину, один фотоприемашк будет освещен болыпе, а другой меньше и на выходе схемы появится напряжение соответствующей полярности. Это напряжение служит управляющим сигналом, передаваемым на сервопривод. Систе.ма точного перемещения и фиксации включается с помощью блока управления 2 (фиг. 1) тогда, когда рабочие органы находятся над заданной дорожкой, и выключается при поступлении команды перемешения каретки на новый адрес. Если заданная точность фиксации равна , ширина анализируюш,ей щели на дорожках // и 12 (фиг. 3) должна быть меньше или равна 2il. Тогда при показанном на фиг. 2 рисунке подвижной шкалы и при смещении каретки на величину Л система будет иметь максимальное возвращающее воздействие. Такое выполнение устройства обеспечивает его упрощение, более низкие экснлуатационные расходы, высокие технические парасравнительно небольшой стометры при имости. Предмет изобретения Устройство для шагового перемещения рабочих органов, напри.мер бл.оков магнитных головок, в запоми1нающих устройствах на магнитных дисках, содержащее привод с узлом управления и кареткой, на которой укреплена шкала измерительного фотоэлектрического преобразователЯ с растровыми дорожками, фотоприемники и установленную перед кареткой неподвижную шкалу диафрагмы, отличающееся тем, что, с целью повышения точности и быстродействия, один из фотопрпемников установлен перед центральной растровой дороЖКой шкалы фотоэлектрического преобразователя, на осевых линиях которой, соответствующих фиксированному положению каретки, выполнены щели, выход этого фотоприемника подключен через реверсивный счетчпк к одному из входов узла управления приводом, а два других фотоприемника соединены по фотобаланспой схеме, подключены через усилитель ко второму входу узла управления приводом и установлены перед двумя другими растровыми дорожками шкалы фотоэлектрического преобразователя, по обе стороны от осевых линий дорожек которого выполнены щели.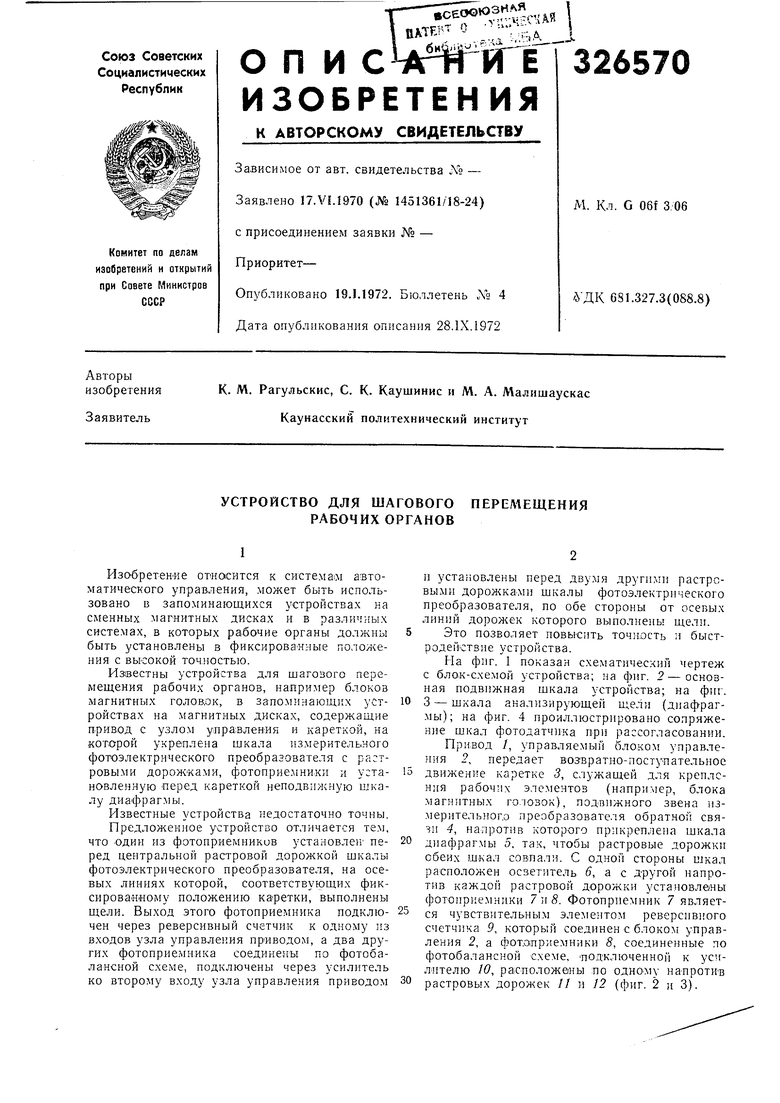
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЕ-КОД | 2003 |
|
RU2248093C1 |
| Фотоэлектрический преобразователь перемещения в код | 1989 |
|
SU1676102A1 |
| Фотоэлектрический преобразователь угловых перемещений | 1977 |
|
SU696280A1 |
| Фотоэлектрический преобразователь перемещений | 1980 |
|
SU1089411A2 |
| Устройство для автоматической фокусировки оптической системы записи-воспроизведения информации | 1990 |
|
SU1802877A3 |
| Фотоэлектрический преобразователь угловых перемещений | 1974 |
|
SU629443A1 |
| Устройство точного отсчета углоизмерительных приборов | 1978 |
|
SU779803A1 |
| ФОТОЭЛЕКТРОННЫЙ ЭКСТЕНЗОМЕТР | 1969 |
|
SU241781A1 |
| Устройство для измерения нестабильности угловой скорости | 1981 |
|
SU1013854A1 |
| Преобразователь с электрооптической редукцией | 1981 |
|
SU966722A1 |