Изобретение относится к системам лазерных средств передачи и измерения информации и может быть использовано в морском и речном транспорте, а также в других областях техники, где необходимо дистанционным методом измерять дальность, координаты, скорость объекта, снабженного уголковым отражателем, и передавать ему визуализированную информацию о его местоположении, что обеспечит повышение безопасности проводки судов в сложных метеоусловиях по сложным фарватерам в прибрежной зоне.
Известен секторный маяк (А.с. 1129856 (СССР)), использующий цветность огня для обозначения зон ориентирования, состоящий из импульсного лазера, активной средой которого является смесь паров меди и золота, генерирующего излучение одновременно на трех длинах волн в красном (λк=0,627 мкм), зеленом (λЗ=0,510 мкм) и желтом (λж=0,578 мкм) участках спектра с суммарной мощностью излучения 0,5 Вт и длительностью импульса τимп=2·10-9 сек, диспергирующей призмы, дефлекторов горизонтального и вертикального отклонения. Указанный маяк предназначен для работы на берегу и используется в акватории портов для формирования цветных коридоров проводки судов. Маяк создает цветовые зоны ориентации в проблесковом режиме, обладает большой дальностью видимости (до 15 км в дневных условиях при коэффициенте пропускания атмосферы τ=0,8 на милю) за счет сканирования узким лазерным лучом с малой угловой расходимостью. Недостатком этого устройства является то, что оно не обеспечивает формирование непрерывных управляемых цветовых коридоров в облучаемой области пространства, не измеряет дальности, координаты и скорости перемещения объекта.
Наиболее близким аналогом предлагаемого изобретения является оптическое навигационное устройство на основе импульсного полупроводникового лазера с электронной накачкой (ИПЛЭН) (патент России 2083444, приоритет от 22.03.94 г.), содержащее одну импульсную электронно-лучевой трубку, трехцветную полупроводниковую лазерную мишень, высоковольтный импульсный источник накачки, блок управления импульсами, объектив, делительную пластину, фотоприемник с оптической системой, блок встроенного контроля, блоки предварительного усиления и формирования сигнала и блок измерения дальности. Устройство позволяет создавать в облучаемой области пространства три одноцветных сектора красного (λК=0,63 мкм), желтого (λЖ=0,57 мкм) и зеленого (λЗ=0,52 мкм) цветов, определять дальность до объекта, снабженного уголковым отражателем, находящегося в облучаемой области пространства, реализовывать проблесковый режим работы. В устройстве-прототипе информацию о дальности до объекта в облучаемой области пространства, снабженного уголковым отражателем, получают за счет введения дальномерного канала, состоящего из делительной пластины, блока фотоприемного устройства с оптической системой, блоков усиления и формирования сигнала и блока измерения дальности, а дальность определяется по времени задержки между излучением импульса ИПЛЭН и его приемом дальномерным каналом. Недостатком прототипа является то, что режим измерения не позволяет определить координаты объекта в облучаемой области пространства, полную скорость его перемещения в облучаемой области. Кроме того, наличие в облучаемой области пространства более одного объекта, снабженного уголковым отражателем, приводит к неопределенности в идентификации полученных данных. Используемый в маяке источник излучения не дает возможности гибко управлять цветовыми зонами, формируя в зависимости от условий их конфигурацию.
Техническим результатом настоящего решения является повышение безопасности проводки судов по сложным фарватерам в прибрежных зонах.
Технический результат получен за счет того, что в маяке применяется в качестве источника излучения сканирующий полупроводниковый лазер с электронной накачкой (СПЛЭН), для чего в устройство введена сканирующая электронно-лучевая трубка, управление которой осуществляет блок управления электронным лучом, блок синхронизации, формирующий сигналы синхронизации работы блока управления электронным лучом и блока памяти, к которому поступает сигнал от блока формирования сигнала и который осуществляет запоминание информации, формируемой блоком синхронизации и соответствующей времени прихода сигнала из дальномерного канала, блок ЭВМ, в который поступают сигналы от блока памяти и блока встроенного контроля, где по программе на основе принятых сигналов в реальном масштабе времени производится вычисление параметров одного или нескольких объектов - координат, дальности, скорости перемещения в облучаемой области пространства, в соответствии с которыми блок ЭВМ вырабатывает управляющие сигналы, поступающие на блок управления электронным лучом, формирующего размеры модулируемых цветовых зон, что позволяет управлять цветовыми зонами, меняя в зависимости от условий их конфигурацию.
Изобретение отличается от ближайшего аналога тем, что:
а) в качестве источника излучения используется сканирующий полупроводниковый лазер с электронной накачкой, для чего устройство дополнительно содержит сканирующую электронно-лучевую трубку и блок управления электронным лучом;
б) устройство дополнительно содержит блок синхронизации;
в) устройство дополнительно содержит блок памяти;
г) устройство дополнительно содержит блок ЭВМ.
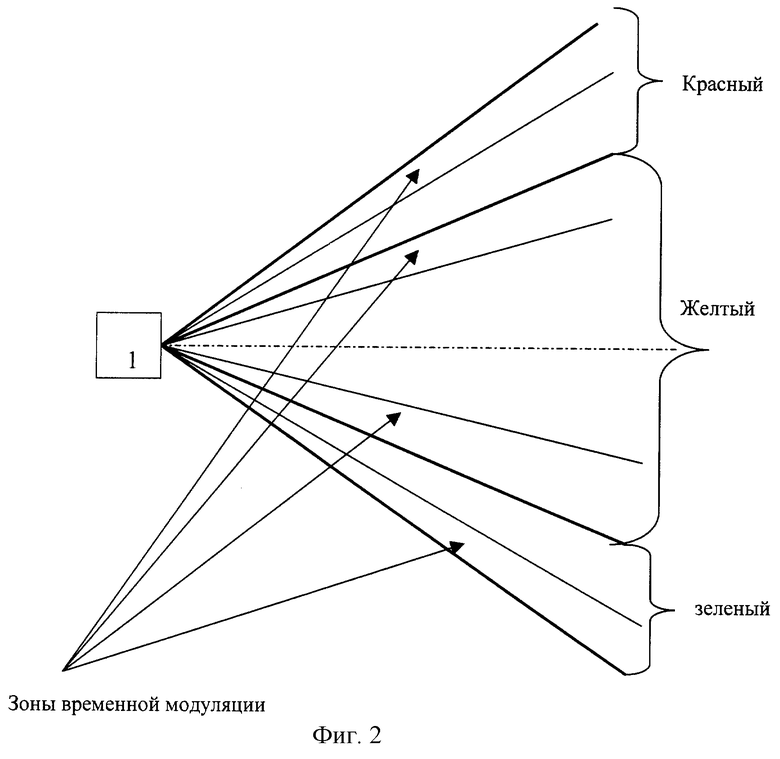
Сущность изобретения поясняется графическим материалом, где на фиг. 1 представлена схема устройства и соответствующие связи между блоками.
Устройство содержит блок управления электронным лучом 1, сканирующую электронно-лучевую трубку 2, лазерную многоцветную мишень 3, объектив 4, делительную пластину 5, блок встроенного контроля 6, оптическую систему фотоприемника 7, фотоприемник 8, блок предварительного усиления 9, блок формирования сигнала 10, блок памяти 11, блок ЭВМ 12, блок синхронизации 13.
Устройство работает следующим образом. Блок управления электронным лучом 1 формирует управляющие напряжения движения и яркости электронного луча, который осуществляет строчно-кадровую развертку с частотой кадров порядка 100 Гц. Строчно-кадровая развертка электронного луча периодически меняется при переходе от нечетного кадра к четному. В течение нечетного кадра электронный луч движется от левого верхнего угла кадра по строке слева направо, а по строкам сверху вниз. В течение четного кадра электронный луч движется из правого нижнего угла по строке справа налево, а по строкам - снизу вверх. Количество строк и их положение на выходной поверхности сканирующей электронно-лучевой трубки 2 остается неизменным от кадра к кадру. На выходной поверхности сканирующей электронно-лучевой трубки 2, являющейся анодом, устанавливается многоцветная лазерная мишень 3, которая является источником светового излучения. Излучение генерируется зоной лазерной мишени 3, на которую падает электронный луч. Движение электронного луча по лазерной мишени 3 приводит к перемещению зоны генерации лазерного излучения. После выхода из лазерной мишени 3 лазерное излучение попадает в объектив 4. Геометрические параметры объектива 4 и размеры цветных зон лазерной мишени 3 формируют в облучаемой области пространства соответствующие цветовые зоны: линейному перемещению зоны генерации по лазерной мишени 3 соответствует угловое перемещение лазерного луча внутри облучаемой области пространства. После объектива 4 излучение попадает на делительную пластину 5, часть излучения, отражаясь от делительной пластины 5, попадает в блок встроенного контроля 6, где вырабатывается сигнал, соответствующий уровню мощности лазерного излучения, другая часть излучения, пройдя делительную пластину 5, уходит в облучаемую область пространства, после чего, отразившись от уголкового отражателя, расположенного на объекте, возвращается назад, отражается от делительной пластины 5 и собирается оптической системой фотоприемника 7 на чувствительной площадке фотоприемника 8. Затем сигнал подается на вход блока предварительного усиления 9, где фильтруется от постоянной составляющей и усиливается до необходимого уровня, после чего подается на вход блока формирования сигнала 10. С выхода блока формирования сигнала 10 преобразованный к уровню, необходимому для обработки логическими микросхемами, сигнал подается на вход блока памяти 11. На другой вход блока памяти 11 подается набор сигналов с блока синхронизации 13. Такой же набор сигналов с блока синхронизации 13 подается в блок управления электронным лучом 1 и определяет режим движения электронного луча сканирующей электронно-лучевой трубки 2. В набор сигналов входят: базовая последовательность импульсов, синхронизированная с движением электронного луча по строкам в прямом и обратном ходе, импульсы, определяющие начала и концы строк нечетных и четных кадров, импульсы, определяющие начала и концы нечетных и четных кадров. После прихода в блок памяти 11 сигнала из блока синхронизации 13, соответствующего началу нечетного кадра, в блоке памяти 11 начинается счет с увеличением на единицу на каждом импульсе базовой последовательности импульсов, синхронизированной с движением электронного луча по строкам в прямом и обратном ходе, приходящей из блока синхронизации 13 и соответствующей развертке электронного луча в сканирующей электронно-лучевой трубке 2. В момент прихода из блока формирования сигнала 10 импульса, соответствующего отраженному от уголкового отражателя объекта в облучаемой области пространства лучу, происходит запоминание номера счета, соответствующего моменту прихода импульса, в блоке памяти 11. При этом счет на увеличение продолжается. Счет на увеличение прекращается после прихода в блок памяти 11 из блока синхронизации 13 импульса, соответствующего окончанию нечетного кадра. В этот момент номер счета блока памяти 11 максимальный и сохраняется до прихода из блока синхронизации 13 импульса начала четного кадра. Одновременно импульс конца нечетного кадра является сигналом записи номера отсчета в блок ЭВМ 12 из блока памяти 11, соответствующего моменту прихода импульса из блока формирования сигнала 10 в блок памяти 11. После этого блок памяти 11 готов к записи информации за время четного кадра. За время нечетного кадра лазерный луч переместится по строкам из левого верхнего угла облучаемой области пространства, что соответствует нулевому отсчету блока памяти 11, в правый нижний угол облучаемой области пространства, что соответствует максимальному отсчету блока памяти 11. Номерам импульсов базовой последовательности импульсов, синхронизированной с движением луча по строкам в прямом и обратном ходе, подаваемой из блока синхронизации 13 в блок памяти 11 и блок управления электронным лучом 1, соответствуют элементарные телесные углы, которые образуют облучаемую область пространства. После прихода из блока синхронизации 13 импульса начала четного кадра в блоке памяти 11 начинается счет на уменьшение на единицу на каждый импульс базовой последовательности импульсов, приходящих из блока синхронизации 13. За время четного кадра блок памяти 11 работает аналогично тому, как он работает в течение нечетного кадра, т.е. запоминает отсчеты, соответствующие моменту прихода импульсов из блока формирования сигнала 10. Приход из блока синхронизации 13 импульса окончания четного кадра соответствует окончанию счета в блоке памяти 11 на уменьшение, что будет соответствовать нулевому отсчету. Импульс окончания четного кадра служит сигналом записи номеров отсчетов из блока памяти 11 в блок ЭВМ 12. соответствующих моменту прихода импульсов из блока формирования сигнала 10, в блок памяти 11. После этого блок памяти 11 сохраняет нулевой отсчет до момента прихода из блока синхронизации 13 сигнала начала нечетного кадра. За время четного кадра лазерный луч переместиться из правого нижнего угла облучаемой области пространства, соответствующего максимальному отсчету блока памяти 11, в левый верхний угол облучаемой области пространства, соответствующей нулевому отсчету блока памяти 11.
Развертка электронного луча в электронно-лучевой трубке 2, а следовательно, и лазерного луча в облучаемой области пространства, формируемая блоком управления электронным лучом 1, синхронизирована в блоке синхронизации 13 с ведением счета в блоке памяти 11.
Измерительный цикл состоит из двух кадров: нечетного и четного. По окончании измерительного цикла, т.е. прихода из блока синхронизации 13 сигнала об окончании четного кадра, в блоке ЭВМ 12 будет содержаться информация в виде отсчетов из блока памяти 11, соответствующих всем объектам, находящихся в этот момент в облучаемой области пространства. Одному объекту в облучаемой области пространства соответствуют два отсчета блока памяти 11: один за время нечетного кадра NH, другой - за время четного кадра NЧ. По этим отсчетам определяется дальность до объекта:

где с - скорость света,
τ - время одного периода базовой последовательности импульсов, синхронизированной с движением электронного луча по строкам в прямом и обратном ходе, блока синхронизации 13, τ=1/F, где F - частота базовой последовательности импульсов.
Вся облучаемая область пространства разбита на сектора, представляющие элементарные телесные углы, каждый из которых имеет фиксированный номер, соответствующий номеру импульса из базовой последовательности импульсов. Номер телесного угла, в котором находится объект, определяется из выражения:
Дальность L и номер элементарного телесного угла Nоб, в котором находится объект, является его полным набором координат в облучаемой области пространства.
Скорость перемещения объекта в облучаемой области пространства определяется за время двух циклов измерения.
Модуль скорости определяется из выражения:
где ΔL - изменение дальности до объекта за период измерения,
ΔN - изменение номера элементарного телесного угла положения объекта за период измерения,
Тиз - период измерения,
К - коэффициент пропорциональности, зависящий от дальности L.
Входящие в формулу изменение дальности, изменение номера элементарного телесного угла и период измерений находятся из выражений:
 ,
,
 ,
,
 ,
,
где L1 - дальность до объекта, измеренная в первом цикле измерения,
L2 - дальность до объекта, измеренная во втором цикле,
Nоб1 - измеренный - в первом цикле измерения номер элементарного телесного угла, где находится объект,
Nоб2 - измеренный во втором цикле измерения номер элементарного телесного угла, где находится объект,
Fкадр - частота кадровой развертки электронного луча.
Направление вектора скорости определяется по знаку ΔL и ΔN.
Нескольким объектам в облучаемой области пространства соответствует несколько отсчетов блока памяти 11 за время нечетного кадра и несколько отсчетов за время четного кадра. На основании этих отсчетов определяются дальность, положение и скорость перемещения объектов в облучаемой области пространства. Возможны различные алгоритмы определения параметров объектов в облучаемой области пространства на основе полученных отсчетов. Один из возможных вариантов заключается в следующем: для определения элементарных телесных углов, соответствующих точному нахождению объектов и, соответственно, определению количества этих объектов после первого цикла измерения проводится n циклов измерений, соответствующих n возможных положений объектов. Количество n определяется из максимально возможного количества разных пар отсчетов из нечетного и четного кадров. Первый элемент пары берется из нечетного кадра, второй - из четного кадра. Каждая пара определяет один из возможных отсчетов, которому соответствует элементарный телесный угол нахождения объекта. В начале каждого из n циклов с выхода блока ЭВМ 12 на вход блока управления электронным лучом 1 подается управляющий сигнал гашения электронного луча в тех его положениях, которые соответствуют телесным углам возможного нахождения объектов, за исключением одного из положений электронного луча, соответствующего одному из всего набора n-возможных элементарных телесных углов. За n циклов измерения просматриваются все возможные телесные углы нахождения объектов. Если за время цикла измерения во время нечетного и четного кадров дальномерный канал принимает по одному отраженному сигналу, значит в этом телесном угле из комбинации n, в котором лазерный луч не был погашен, т.е. не гасился электронный луч, находится объект.
За время, равное п измерительных циклов, будет определено положение всех объектов. Полная информация обо всех объектах, находящихся в облучаемой области пространства, определяется за время, которое находится из выражения:
 ,
,
где n - количество измерительных циклов;
 ,
,
а - количество объектов в облучаемой области пространства,
Fкадр - частота кадровой развертки.
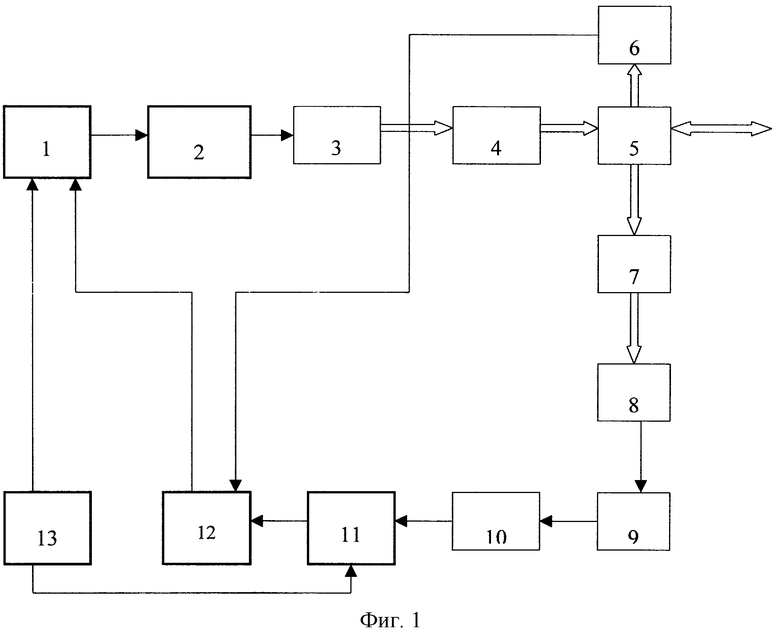
Вычисленные по программе в блоке ЭВМ 12 величины дальности, положения и скорости объекта в облучаемой области пространства являются основой для выработки управляющих импульсов, подаваемых с выхода блока ЭВМ 12 на вход блока управления электронным лучом 1. Сигналы управления электронным лучом позволяют модулировать различные участки облучаемой области пространства, создавая при этом внутри раскрывов базовых цветов, определяемых многоцветной лазерной мишенью 3 и объективом 4, гибко управляемые зоны модулированного излучения, которые изменяются в облучаемой области пространства при подаче управляющего сигнала на блок управления электронным лучом 1 от блока ЭВМ 12.
Графически сущность применения конструкции маяка на основе трехцветного СПЛЭН поясняется на фиг. 2.
Устройство выполнено на следующей элементной базе: в качестве источника излучения применен сканирующий полупроводниковый лазер с электронной накачкой типа СПЛЭН-3, многоцветная лазерная мишень выполнена из полупроводниковых материалов типа АIIBYI, оптические элементы объектива, оптической системы фотоприемника, делительная пластина - из стекла К8, в качестве фотоприемного устройства применен фотоэлектронный умножитель ФЭУ-64, в качестве датчика блока встроенного контроля - фотодиод ФД-21КП, в качестве блока ЭВМ использован персональный компьютер или микроЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2002 |
|
RU2242052C2 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1999 |
|
RU2227303C2 |
| ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ИЗМЕРИТЕЛЬ | 1993 |
|
RU2106658C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛИЗАЦИИ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЗОНЕ НА ЗАДАННОМ УДАЛЕНИИ ОТ ОПЕРАТОРА | 2007 |
|
RU2343503C2 |
| Способ сопровождения космического объекта лазерным лучом | 2019 |
|
RU2716610C1 |
| Способ определения направления на космический объект | 2019 |
|
RU2706844C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462732C1 |
| Способ определения направления на космический объект | 2018 |
|
RU2676999C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462731C1 |
| ЛАЗЕРНЫЙ МАЯК ДЛЯ СИСТЕМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ С 360-ГРАДУСНЫМ СКАНИРОВАНИЕМ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2022 |
|
RU2803925C1 |
Изобретение относится к системам лазерных средств передачи и измерения информации и может быть использовано в морском и речном транспорте для проводки судов по сложным фарватерам и безопасного плавания в прибрежной зоне, а также в других областях техники, где необходимо дистанционным методом измерять дальность, координаты и скорость объекта. Техническим результатом является повышение безопасности проводки судов по сложным фарватерам в прибрежных зонах. Лазерный маяк включает многоцветную лазерную мишень, объектив, делительную пластину, блок встроенного контроля, оптическую систему фотоприемника и фотоприемник, блоки предварительного усиления и формирования сигнала, при этом в качестве источника излучения используется сканирующий полупроводниковый лазер с электронной накачкой, для чего в устройство введена сканирующая электронно-лучевая трубка с управлением разверткой электронного луча, для управления которой введен блок управления электронным лучом, для синхронизации работы которого с введенным блоком памяти, осуществляющим запоминание информации, состоящей из номеров отсчетов, соответствующих моменту прихода импульсов из блока формирования сигнала за время нечетного и четного кадра, введен блок синхронизации, с которого набор сигналов подается на другой вход блока памяти и такой же набор сигналов с блока синхронизации подается в блок управления электронным лучем, и введен блок ЭВМ, в который поступают сигналы от блока памяти и блока встроенного контроля, где по программе проводится вычисление параметров одного или нескольких объектов, в соответствии с которыми блок ЭВМ вырабатывает управляющие сигналы, поступающие на блок управления электронным лучом, формирующего размеры модулируемых цветовых зон, что позволяет управлять цветовыми зонами, меняя в зависимости от условий их конфигурацию. 2 ил.
Лазерный маяк, включающий многоцветную лазерную мишень, объектив, делительную пластину, оптически сопряженные с ней блок встроенного контроля, оптическую систему фотоприемника и фотоприемник, блоки предварительного усиления и формирования сигнала, отличающийся тем, что в качестве источника излучения используется сканирующий полупроводниковый лазер с электронной накачкой, для чего в устройство введена сканирующая электронно-лучевая трубка с управлением разверткой электронного луча, для управления которой введен блок управления электронным лучом, обеспечивающий встречную строчно-кадровую развертку электронного луча, для синхронизации работы которого с введенным блоком памяти, осуществляющим запоминание информации, состоящей из номеров отсчетов, соответствующей моменту прихода импульсов из блока формирования сигнала за время нечетного и четного кадра, составляющее измерительный цикл, введен блок синхронизации, с которого набор сигналов подается на другой вход блока памяти и такой же набор сигналов с блока синхронизации подается в блок управления электронным лучем, и введен блок ЭВМ, в который поступают сигналы от блока памяти и блока встроенного контроля, где по программе на основе принятых сигналов в реальном масштабе времени проводится вычисление параметров одного или нескольких объектов - координат, дальности, скорости перемещения в облучаемой области пространства, в соответствии с которыми блок ЭВМ вырабатывает управляющие сигналы, поступающие на блок управления электронным лучом, формирующего размеры модулируемых цветовых зон, что позволяет управлять цветовыми зонами, меняя в зависимости от условий их конфигурацию.
| ОПТИЧЕСКОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1994 |
|
RU2083444C1 |
| RU 94027805 A1, 27.08.1996 | |||
| УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ ПРОСТРАНСТВЕННЫХ РЕЛЬЕФОВ (ОПТООРИЕНАТОР) | 2001 |
|
RU2191352C1 |
| Лазерная система ориентирования объекта | 1985 |
|
SU1287451A1 |
| US 4064424 A, 20.12.1977 | |||
| US 4776672 А, 11.10.1988 | |||
| US 5422906 A, 06.06.1995. | |||

