Изобретение относится к системам отслеживания местоположения объектов, которые могут использоваться как в системах виртуальной реальности (VR) или дополненной реальности (AR), так и для управления, посадки и стыковки летательных аппаратов, проводки судов через узости или створы мостов, для дистанционного управления робототехническими устройствами в опасных для человека зонах и т.д.
Наиболее близким по технической сущности к предлагаемому техническому решению является устройство лазерного маяка, взятое в качестве прототипа [патент US20160131761А1], состоящее из корпуса, двигателя, с помощью которого вращается ротор в виде барабана, при этом на роторе установлены два лентикуляра, сориентированные ортогонально друг по отношению друга и под 45° к направлению сканирования лучей, при этом для формирования лазерного излучения используется лазер, установленный на корпусе, излучение которого проходит через отклоняющую систему, жестко связанную с вращающимся ротором и состоящую из полупрозрачного и глухого зеркал, с помощью которых лазерное излучение направляется на соответствующие лентикуляры, которые в свою очередь формируют веерообразную плоскость из лазерного луча. Кроме этого на корпусе установлен излучатель, который в начале каждого периода вращения барабана (ротора) в широком телесном угле облучает окружающее пространство всенаправленным импульсом синхронизации, а также сенсор оборотов ротора, используемый для определения момента излучения всенаправленного импульса синхронизации. Для синхронизации нескольких лазерных маяков между собой - предусмотрена электрическая, оптическая или радио связь между соседними маяками.
Недостатки данного устройства:
- угол сканирования окружающего пространства лазерным маяком менее 180°, поэтому имеются «мертвые зоны», в которых невозможно определить одну или две лазерные плоскости;
- всенаправленный импульс синхронизации у всех лазерных маяков одинаковый, что мешает идентификации принимаемых лазерных лучей фотоприемниками на объекте отслеживания, а это приводит к сложности масштабирования системы лазерных маяков из-за необходимости синхронизации очередности излучения импульсов синхронизации между маяками, поэтому обычно используется не более двух маяков;
- необходимость синхронизации скорости вращения барабанов - роторов всех маяков, так как в сигналах от маяков отсутствует их идентификация и в случае рассинхронизации вращения роторов нарушается идентификация сигналов от разных маяков.
Маяк-прототип обычно устанавливают на треногу, что небезопасно как для лазерного маяка, так и для операторов/игроков, перемещающихся по пространству отслеживания, по причине возможного столкновения оператора/игрока с лазерным маяком. Целесообразно лазерный маяк установить на недоступном для оператора/игрока месте, например, на потолке или стене. Лазерный маяк прототип не подходит для такого применения, так как полный угол раскрытия веерообразного лазерного луча составляет 150° при его развороте 45°, что не позволяет охватывать сканирующими лучами пространство вдоль оси вращения ротора маяка.
Автором для лазерного маяка, способного сканировать окружающее пространство в угле 360° с перекрытием лазерными веерообразными лучами оси вращения ротора, предлагается лентикуляры установить симметрично оси вращения на боковую поверхность конического барабана, связанного с полым ротором двигателя. Для отклонения лазерных лучей на соответствующие лентикуляры использовать равнобедренную отражающую призму, жестко установленную на оси вращения конического барабана, при этом ось вращения барабана должна проходит через вершину призмы, а для вычисления координат с помощью веерообразных лучей предлагается использовать всенаправленный импульс синхронизации, как это предложено в прототипе. Для идентификации лазерного излучения лазерных маяков, что позволит масштабировать пространство отслеживания объектов множеством маяков, предлагается модулировать лазерное излучение веерообразных лучей по частоте, при этом у соседних маяков лазерное излучение должно быть модулировано на разных частотах. Кроме этого предлагается осуществить цифровую кодировку всенаправленного импульса синхронизации, с помощью которой передавать информацию на объект отслеживания:
- о частоте модуляции лазерного излучения данного маяка;
- об идентификационном номере лазерного маяка,
а также наклонить лентикуляры относительно оси вращения барабана, чтобы убрать «мертвую зону» вдоль оси вращения лазерного маяка, что позволит устанавливать лазерные маяки, как на потолке, так и на любой недоступной для оператора/игрока поверхности.
Технический результат предлагаемого изобретения направлен на создание лазерного маяка для систем виртуальной реальности, который способен сканировать окружающее пространство вокруг себя в угле 360°, который можно устанавливать на потолок и на любой недоступной для оператора/игрока поверхности.
Технический результат достигается использованием: двух лентикуляров, установленных симметрично оси вращения на боковую поверхность полого конического барабана, связанного с полым ротором двигателя; равнобедренной отражающей призмы, которая жестко установлена на оси вращения барабана, при этом ось вращения ротора проходит через вершину призмы; для идентификации принадлежности веерообразных лучей определенному лазерному маяку использовать их частотную модуляцию, с помощью которой за время прохождения лазерного излучения через фотоприемник можно идентифицировать лазерный маяк, от которого распространяются эти лучи; при этом информация о частоте модуляции лазерного излучения данного маяка передается в кодировке всенаправленного импульса синхронизации.
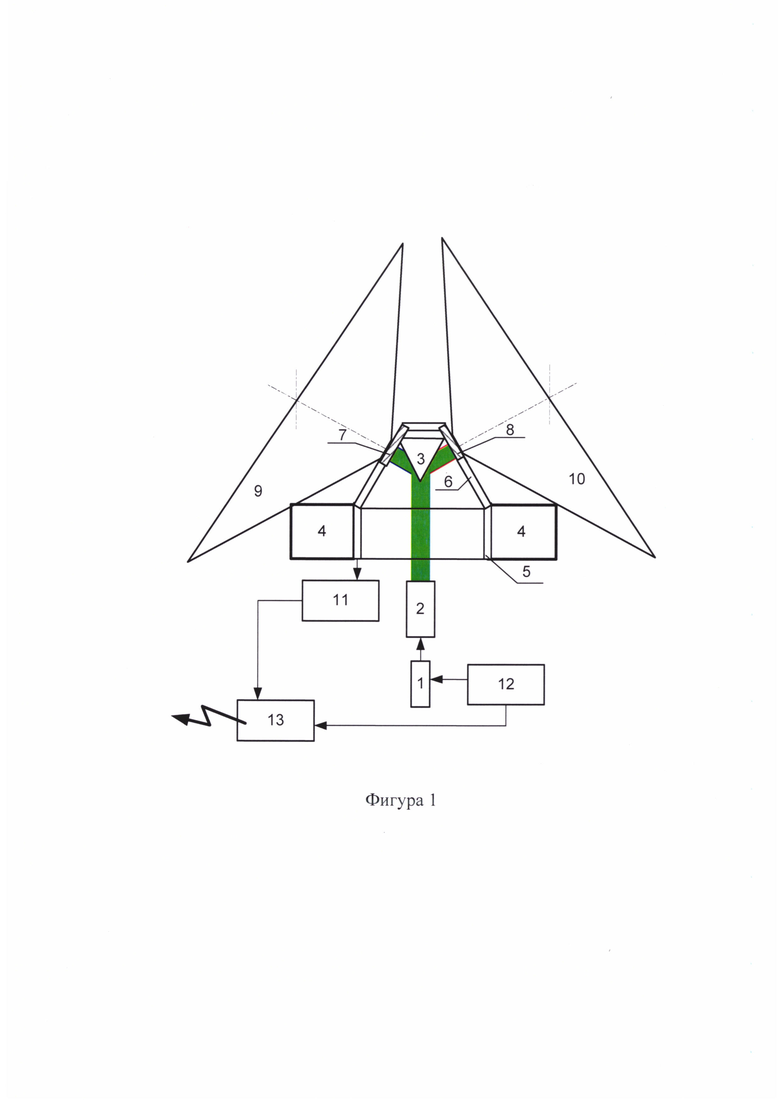
Работа лазерного маяка для систем виртуальной реальности с 360-градусным сканированием окружающего пространства поясняется фиг. 1.
На фигуре 1 изображен лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства.
Рассмотрим лазерный маяк-прототип, который состоит из:
- корпуса;
- установленного на корпусе двигателя, с помощью которого вращается полый цилиндрический барабан;
- двух лентикуляров, установленных на боковой стенке барабана симметрично относительно оси вращения барабана;
- лазера, который установлен на корпусе, излучение которого проходит по оси вращения барабана;
- отклоняющей системы, жестко установленной на оси вращения барабана и состоящей из последовательно установленных по ходу распространения лазерного луча, под углом 45° к оси вращения ротора полупрозрачного и глухого зеркал, с помощью которых лазерное излучение направляется на соответствующие лентикуляры, с помощью которых формируются веерообразные лучи, плоскости наклона которых определяются ориентацией цилиндрических линз лентикуляров;
- сенсора оборотов ротора, который установлен на корпусе и используется для отсчета нулевого угла разворота ротора;
- излучателя, который установлен на корпусе, и который в начале каждого периода вращения ротора световой вспышкой или по радиоканалу облучает окружающее пространство в широком телесном угле.
Недостатки данного устройства:
- угол сканирования окружающего пространства лазерным маяком менее 180°, поэтому имеются «мертвые зоны», в которых невозможно наблюдать лазерные плоскости;
- сложность масштабирования пространства отслеживания несколькими маяками из-за возникающей необходимости синхронизации очередности излучения импульсов всенаправленной синхронизации между маяками, поэтому обычно используют не более двух маяков;
- необходимость синхронизации скорости вращения барабанов - роторов всех маяков, так как в сигналах от маяков отсутствует их идентификация, и в случае рассинхронизации вращения роторов нарушается идентификация сигналов от разных маяков.
Автором для лазерного маяка, способного сканировать окружающее пространство в угле 360° с перекрытием лазерными веерообразными лучами оси вращения ротора, предлагается:
• для перекрытия зоны сканирования вдоль оси вращения лентикуляры устанавливать на полый барабан, имеющий вид усеченного конуса с углом в вершине конуса 2β. Например, если полный угол раскрытия веерообразной плоскости составляет 150°, и ее наклон к плоскости вращения 45°, то лентикуляры необходимо симметрично наклонить к оси вращения ротора на угол β, равный:

где  - полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения;
- полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения;
• для отклонения лучей на соответствующие лентикуляры использовать равнобедренную отражающую призму, которая жестко установлена на барабан, прикрепленный к полому ротору двигателя симметрично оси вращения, при этом ось вращения барабана проходит через вершину призмы, при этом угол в вершине призмы должен быть равным:
Наклон лентикуляров за счет конической боковой поверхности барабана позволяет закрыть «мертвую зону» вдоль оси вращения лазерного маяка, что позволит устанавливать лазерные маяки как на потолке, так и на любой недоступной для оператора/игрока поверхности;
• для идентификации принадлежности веерообразных лучей определенному лазерному маяку использовать их частотную модуляцию, с помощью которой за время прохождения лазерного излучения через фотоприемник можно идентифицировать лазерный маяк, от которого распространяются эти лучи, при этом информация о частоте модуляции лазерного излучения данного маяка передается в кодировке всенаправленного импульса синхронизации. Использование цифровой кодировки веерообразных лазерных плоскостей позволяет бесконечно масштабировать пространство отслеживания и осуществлять взаимную калибровку между соседними лазерными маяками при расположении шлема виртуальной реальности в зоне пересечения сканирующих лазерных лучей маяков.
На основании вышеизложенного автор предлагает лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства, состоящий из:
- корпуса;
- установленного на корпусе двигателя с полым ротором, с помощью которого вращается полый барабан в виде усеченного конуса с углом в вершине конуса 2β, где

где  - полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения;
- полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения;
- двух лентикуляров, установленных на боковую стенку барабана, с помощью которых формируются лазерные веерообразные лучи, плоскости которых сориентированы под различными углами к плоскости вращения ±γ;
- равнобедренной отражающей призмы, которая жестко установлена на барабан симметрично оси вращения, при этом ось вращения ротора проходит через вершину призмы, а угол в вершине призмы равен:

- лазера, излучение которого проходит через коллиматор;
- блока модуляции лазерного излучения и кодировки всенаправленного импульса синхронизации;
- блока всенаправленного импульса синхронизации;
- сенсора оборотов ротора, для определения момента излучения всенаправленного импульса синхронизации вначале каждого цикла сканирования.
Лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства поясняется фигурой 1 и работает следующим образом.
Излучение лазера 1 проходит через коллиматор 2, где лазерное излучение расширяется до нескольких мм. Одновременно с работой лазера двигатель 4 вращает полый ротор 5, который вращает пустотелый усеченный конический барабан 6 с углом в вершине конуса 2β, где  Лазерное излучение после коллиматора 2 распространяется по оси вращения полого ротора 5, по оси вращения конического барабана 6 и падает на отражающие грани равнобедренной отражающей призмы 3, которая жестко установлена на барабан 6 симметрично оси вращения, при этом ось вращения барабана проходит через вершину призмы 3, при этом угол в вершине призмы равен
Лазерное излучение после коллиматора 2 распространяется по оси вращения полого ротора 5, по оси вращения конического барабана 6 и падает на отражающие грани равнобедренной отражающей призмы 3, которая жестко установлена на барабан 6 симметрично оси вращения, при этом ось вращения барабана проходит через вершину призмы 3, при этом угол в вершине призмы равен  После отражения от граней призмы 3 каждый лазерный луч проходит через лентикуляры 7 и 8, которые установлены на конической поверхности ротора, при этом цилиндрические линзы лентикуляров сориентированы сонаправлено и под углом γ к плоскости вращения. Основное свойство лентикуляров - преобразовывать лазерные лучи в веерообразные лазерные лучи 9 и 10 с полным углом раскрытия
После отражения от граней призмы 3 каждый лазерный луч проходит через лентикуляры 7 и 8, которые установлены на конической поверхности ротора, при этом цилиндрические линзы лентикуляров сориентированы сонаправлено и под углом γ к плоскости вращения. Основное свойство лентикуляров - преобразовывать лазерные лучи в веерообразные лазерные лучи 9 и 10 с полным углом раскрытия  который задается параметрами цилиндрических линз, составляющих массив линз лентикуляра, и коэффициентом преломления оптического материала, из которого изготовлен лентикуляр, а угол наклона плоскости веерообразных лучей задается ориентацией массива цилиндрических линз лентикуляров. При такой конструкции при развороте барабана на 180° веерообразные лазерные лучи будут сканировать пространство плоскостями развернутыми друг относительно друга на угол 2γ Частотная модуляция лазерных веерообразных лучей, осуществляемая с помощью блока модуляции 12, содержит информацию о принадлежности лучей данному лазерному маяку, при этом информация о частоте модуляции данного маяка передается с помощью кодировки всенаправленного импульса синхронизации, который излучается блоком всенаправленного импульса синхронизации 13, связанного с блоком модуляции 12 и сенсором оборотов ротора 11.
который задается параметрами цилиндрических линз, составляющих массив линз лентикуляра, и коэффициентом преломления оптического материала, из которого изготовлен лентикуляр, а угол наклона плоскости веерообразных лучей задается ориентацией массива цилиндрических линз лентикуляров. При такой конструкции при развороте барабана на 180° веерообразные лазерные лучи будут сканировать пространство плоскостями развернутыми друг относительно друга на угол 2γ Частотная модуляция лазерных веерообразных лучей, осуществляемая с помощью блока модуляции 12, содержит информацию о принадлежности лучей данному лазерному маяку, при этом информация о частоте модуляции данного маяка передается с помощью кодировки всенаправленного импульса синхронизации, который излучается блоком всенаправленного импульса синхронизации 13, связанного с блоком модуляции 12 и сенсором оборотов ротора 11.
Если зону отслеживания объекта сканируют лучи соседнего лазерного маяка, то частота модуляции его лазерного излучения должна отличатся, при этом объект отслеживания, приняв сигнал всенаправленного импульса синхронизации от соседнего лазерного маяка, определяет частоту модуляции излучения этого маяка и определяет координаты фотоприемников относительно соседнего маяка. Далее объект отслеживания осуществляет взаимную калибровку между соседними маяками и осуществляет работу в пространстве отслеживания по лазерному маяку, лазерное излучение которого максимально.
Так как объект отслеживания может попасть в зону, равноудаленную от четырех лазерных маяков, то целесообразно предусмотреть изготовление четырех видов лазерных маяков, у которых отличная друг от друга модуляция лазерного излучения, при этом необходимо их идентифицировать, например, по маркировке или цвету.
Для упрощения установки множества лазерных маяков с разной частотой модуляции целесообразно, чтобы маяки были полностью идентичными, но при этом, чтобы между маяками существовал радиоканал связи, при этом один маяк должен быть ведущим. Тогда по радиоканалу ведущий маяк, обменявшись информацией с соседними маяками, поочередно устанавливает на них отличающиеся частоты модуляции, которые отличны от модуляции ведущего маяка. Далее, после установки частоты модуляции, маяки с установленными частотами модуляции по радиоканалу, связавшись с соседними маяками, у которых частота еще не установлена, устанавливают частоты модуляции, отличные от своей частоты. Таким образом, можно автоматически создать сеть из лазерных маяков, так чтобы частоты модуляции соседних маяков не совпадали.
Алгоритм сложный и требует наличия в ведущем лазерном маяке микроконтроллера, с помощью которого создается сеть из множества маяков с различными частотами модуляции.
Для простоты идентификации маяков и установки их частоты модуляции можно к одному любому лазерному маяку подсоединить персональный компьютер (далее - ПК) (по wi-fi, Bluetooth и т.п), который по специальной программе установит связь со всеми маяками по радиоканалу, присвоит номера лазерных маяков в сети и установит на них частоты модуляции таким образом, чтобы у соседних маяков частоты модуляции лазерного излучения не совпадали. После настройки сети лазерных маяков ПК можно отключить и перевести сеть лазерных маяков в автономный рабочий режим.
Для реализации такого маяка необходимо в устройство лазерного маяка, кроме радиоканала связи с маяками, ввести узел связи с ПК с помощью wi-fi, Bluetooth, usb и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕОГРАНИЧЕННОЕ ПРОСТРАНСТВО ОТСЛЕЖИВАНИЯ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ ДЛЯ НЕСКОЛЬКИХ ИГРОКОВ | 2022 |
|
RU2803453C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ ЗАДАННОЙ ОБЛАСТИ ПРОСТРАНСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375724C1 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ЦВЕТНОГО ВИРТУАЛЬНОГО ВИДЕОИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ЭФФЕКТА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ У ПОЛЬЗОВАТЕЛЯ (ВАРИАНТЫ) | 2007 |
|
RU2375840C2 |
| СПОСОБ ЛАЗЕРНОЙ ИМИТАЦИИ СТРЕЛЬБЫ | 2014 |
|
RU2586465C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2328024C2 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ МАЯК КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2462732C1 |
| УСТРОЙСТВО И СПОСОБ ОТСЛЕЖИВАНИЯ ПОЛОЖЕНИЯ ГЛАЗА | 2019 |
|
RU2724445C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ФОКУСИРОВКИ ГЛАЗА ДЛЯ НАГОЛОВНОГО УСТРОЙСТВА ОТОБРАЖЕНИЯ, НАГОЛОВНОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ | 2019 |
|
RU2724442C1 |
| УСТРОЙСТВО ДОПОЛНЕННОЙ РЕАЛЬНОСТИ НА ОСНОВЕ ГОЛОГРАФИЧЕСКОГО ОПТИЧЕСКОГО ВОЛНОВОДА | 2020 |
|
RU2740065C1 |
| СПОСОБ И СИСТЕМА ОТСЛЕЖИВАНИЯ ДВИЖЕНИЙ ЧЕЛОВЕКА | 2018 |
|
RU2736876C2 |
Изобретение относится к системам отслеживания местоположения объектов. Лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства состоит из корпуса; установленного на корпусе двигателя с полым ротором, с помощью которого вращается полый барабан в виде усеченного конуса с углом в вершине конуса 2β, равным:  где α0 - полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения; двух лентикуляров, установленных на боковую стенку барабана, с помощью которых формируются лазерные веерообразные лучи, плоскости которых сориентированы под различными углами к плоскости вращения ±γ; равнобедренной отражающей призмы, которая жестко установлена на барабан симметрично оси вращения, при этом ось вращения ротора проходит через вершину призмы, а угол в вершине призмы равен:
где α0 - полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения; двух лентикуляров, установленных на боковую стенку барабана, с помощью которых формируются лазерные веерообразные лучи, плоскости которых сориентированы под различными углами к плоскости вращения ±γ; равнобедренной отражающей призмы, которая жестко установлена на барабан симметрично оси вращения, при этом ось вращения ротора проходит через вершину призмы, а угол в вершине призмы равен:  лазера, излучение которого проходит через коллиматор; блока модуляции лазерного излучения и кодировки всенаправленного импульса синхронизации; блока формирования всенаправленного импульса синхронизации; сенсора оборотов ротора для определения момента излучения всенаправленного импульса синхронизации в начале каждого цикла сканирования. Изобретение обеспечивает сканирование пространства в угле 360° с возможностью установки устройства на потолок и на любой недоступной для оператора поверхности. 2 з.п. ф-лы, 1 ил.
лазера, излучение которого проходит через коллиматор; блока модуляции лазерного излучения и кодировки всенаправленного импульса синхронизации; блока формирования всенаправленного импульса синхронизации; сенсора оборотов ротора для определения момента излучения всенаправленного импульса синхронизации в начале каждого цикла сканирования. Изобретение обеспечивает сканирование пространства в угле 360° с возможностью установки устройства на потолок и на любой недоступной для оператора поверхности. 2 з.п. ф-лы, 1 ил.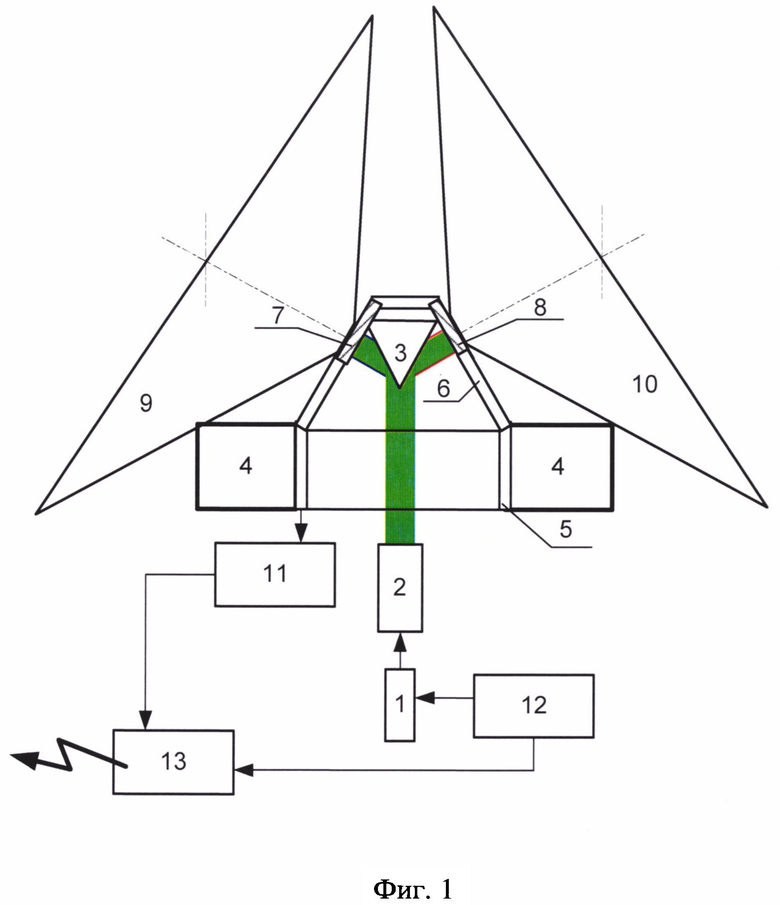
1. Лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства, состоящий из:
- корпуса;
- установленного на корпусе двигателя с полым ротором, с помощью которого вращается полый барабан в виде усеченного конуса с углом в вершине конуса 2β, где

где α0 - полный угол раскрытия веерообразной плоскости, γ - угол наклона плоскости лазерного веерообразного луча к плоскости вращения;
- двух лентикуляров, установленных на боковой стенке барабана, цилиндрические линзы которых сориентированы сонаправлено и под углом γ к плоскости вращения;
- лазера, излучение которого проходит через коллиматор, с помощью которого лазерный луч расширяется и регулируется его расходимость в пространстве;
- равнобедренной отражающей призмы, которая жестко установлена на ротор двигателя симметрично оси вращения, при этом ось вращения ротора проходит через вершину призмы, при этом угол в вершине призмы равен:

- блока всенаправленного импульса синхронизации;
- блока модуляции лазерного излучения и кодировки всенаправленного импульса синхронизации;
- сенсора оборотов ротора, для определения момента излучения всенаправленного импульса синхронизации в начале каждого цикла сканирования.
2. Лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства по п. 1, отличающийся тем, что на корпусе установлен радиоканал связи, с помощью которого возможен обмен информацией между лазерными маяками, при этом в одном - ведущем лазерном маяке установлен микроконтроллер.
3. Лазерный маяк для систем виртуальной реальности с 360-градусным сканированием окружающего пространства по п. 1, отличающийся тем, что на корпусе установлен радиоканал связи, с помощью которого возможен обмен информацией между лазерными маяками, и узел связи с персональным компьютером.
| CN 108279399 A, 13.07.2018 | |||
| WO 2019048866 A1, 14.03.2019 | |||
| US 2018234137 A1, 16.08.2018. |
