Изобретение относится к технике неразрушающего многопараметрового контроля, а именно к технологии метрологического обеспечения матричных вихретоковых преобразователей физических параметров, и предназначено для поверки и экспертизы метрологии, надежности и полного ресурса матричных вихретоковых преобразователей в экстремальных условиях климатических и механических воздействий окружающей среды.
Известны способы определения метрологических показателей матричного вихретокового преобразователя, заключающиеся в том, что преобразователь устанавливают на многопараметровом поверочном стенде на заданном зазоре напротив эталонного образца, возбуждают катушки индуктивности (чувствительные элементы) преобразователя коммутирующим током переменной частоты, затем эталонный образец смещают через дискретные участки пути последовательно по взаимно перпендикулярным направлениям относительно оси центрирования преобразователя и образца, что обеспечивает имитацию изменения физических параметров натурного объекта контроля, процедуру повторяют на различных зазорах между матричным преобразователем и образцом, далее регистрируют выходные сигналы преобразователя и строят зависимости этих сигналов от изменения значений физических параметров для оценки метрологических показателей поверяемого преобразователя [Патент РФ №2082641, БИ №18. 1997].
Основными недостатками способов являются: функциональное ограничение поверки матричных преобразователей только метрологическими его показателями в статических условиях, стабильность которых не будет достоверна для динамики; процедуру поверки преобразователя необходимо периодически повторять практически перед каждым новым циклом контроля натурного многопараметрового объекта, что экономически затратно. Кроме того, способы не позволяют определить эксплуатационную надежность и полный ресурс поверяемого преобразователя.
Известны способы определения надежности матричных вихретоковых преобразователей, заключающиеся в том, что матричный преобразователь устанавливают в климатическую камеру, возбуждают катушки индуктивности матричного преобразователя коммутирующим током переменной частоты, создают в камере условия, адекватные изменению в отдельности факторов внешней окружающей среды, затем регистрируют с каждого из выходов преобразователя изменение выходных электрических сигналов от изменения каждого из факторов, строят соответствующие зависимости, по которым оценивают надежность поверяемого преобразователя, при этом максимальные значения факторов, имитирующих внешнюю окружающую среду, устанавливают в камере величинами не более предельно-допустимых значений, указанных в технических условиях на поверяемый преобразователь [ГОСТ 20.57.406-81. Методы испытаний. М.: Издательство стандартов, 1981].
Эти способы в метрологии известны как государственные или межведомственные климатические и механические испытания, которым подвергают все выпускаемые промышленностью контрольно-измерительные приборы. Такие испытания проводят перед эксплуатацией измерительного прибора в производстве один раз, т.е. тогда, когда прибор сдают заказчику в использование. К климатическим и механическим факторам окружающей среды относят: изменение температуры в пределах, характерных для регионов РФ (от -60 до +60°С), воздействие дождя, влажности, воздушного потока с твердыми неэлектропроводящими и масляными включениями, при обледенении конструкции вихретокового преобразователя и заносе снегом зоны контроля и др. Такая среда характерна, например, при контроле физических параметров объектов железнодорожного транспорта на ходу поезда в регионах с экстремальными условиями окружающей среды.
Данные способы не лишены недостатков. Они не позволяют обеспечить условия одновременного воздействия изменяющейся совокупности факторов, адекватных реальным условиям окружающей среды, а следовательно, определить полный ресурс прибора. Полный ресурс складывается из суммы реального и остаточного эксплуатационных ресурсов. Реальный эксплуатационный ресурс рассчитывается приближенно по известным аналитическим зависимостям и его значение заносится в техническое условие на данный измерительный прибор. Обычно расчетное время реального ресурса измерительного прибора, установленного на объекте контроля, никогда не исчерпывается, например, за счет неучтенного времени останова работы контролируемого технического объекта для ремонта или профилактических работ, во времени которого прибор не работает (отдыхает). Отсюда и появляется остаточный ресурс для прибора неразрушающего контроля. Кроме того, остаточный ресурс до сих пор вообще не определялся, поэтому авторами сейчас создана методика его аналитического расчета, которая в настоящее время апробируется [1].
Наиболее близким техническим решением к заявляемому представляется способ определения метрологических показателей матричного вихретокового преобразователя в динамических условиях эксплуатации, заключающийся в том, что катушки индуктивности матричного преобразователя возбуждают коммутирующим током переменной частоты, воздействуют электромагнитно и поочередно одновременно на все катушки индуктивности преобразователя изменяющимся по величине калиброванным электрическим напряжением, эквивалентным по величине и имитирующим изменение определенного физического параметра натурного образца, повторяют процедуру воздействия на катушки индуктивности преобразователя другими изменяющимися калиброванными электрическими напряжениями, имитирующими другие физические параметры натурного образца, строят зависимости выходных сигналов поверяемого преобразователя от изменения каждого из напряжений, имитирующих физические параметры, и судят по зависимостям о метрологических показателях (точности, чувствительности) поверяемого преобразователя [Патент РФ №2082640. БИ №18, 1997].
Способ интересен тем, что он не нуждается в постоянном или периодическом использовании многопараметрового стендового оборудования, а его преимуществом является то, что информация, полученная однажды на стендовом оборудовании с эталонными образцами и на образцовом матричном вихретоковом преобразователе, запомнена в виде информационно-справочной системы, содержащей в себе данные об изменении каждого из измеряемых физических параметров, выраженных в виде изменения калиброванных электрических напряжений. Здесь под физическим параметром понимается: перемещение, зазор, дефект с его особенностями, электрофизические свойства и др. Каждый из множества физических параметров, выраженных в виде калиброванных электрических напряжений, воздействует электромагнитно на поверяемый преобразователь, а справочная система в то же время позволяет автоматически по заданной программе формировать изменяемые по величине калиброванные электрические напряжения в соответствии с изменением того или иного параметра или фактора. С другой стороны, способ ограничен в функциональных возможностях, так как не позволяет определить полный ресурс эксплуатации поверяемого матричного вихретокового преобразователя в экстремальных условиях окружающей среды.
Техническим результатом, на достижение которого направлено данное техническое решение, являются моделирование изменения физических параметров натурного объекта и факторов окружающей среды электромагнитным калиброванным электрическим напряжением и возможность определения полного эксплуатационного ресурса в условиях экстремальных климатических и механических воздействий, что в целом при использовании новой технологии обеспечит качество и надежность контролируемых многопараметровых объектов особенно ответственного, тем более техноопасного назначения. При этом новая технология экономична, поскольку не требует постоянного использования поверочного стендового оборудования и специальных климатических камер, инициирующих изменение физических параметров натурного объекта контроля и факторов окружающей среды.
Сущность изобретения состоит в том, что в способе определения метрологических показателей и надежности матричного вихретокового преобразователя в динамических условиях эксплуатации, заключающемся в возбуждении катушек индуктивности образцового матричного преобразователя коммутирующим током переменной частоты, в размещении образцового матричного преобразователя сначала на многопараметровом стенде, затем в климатической камере и в обоих случаях в раздельном снятии с выходов образцового матричного преобразователя зависимостей изменения выходных электрических сигналов от изменения каждого из n физических параметров эталонных образцов и каждого из m факторов окружающей среды соответственно, а полученные информационно-справочные экспериментальные данные запоминают и создают по ним программное обеспечение автоматизированной поверки последующих матричных преобразователей, позволяющее обеспечить поочередное электромагнитное воздействие одновременно на все катушки индуктивности поверяемого матричного преобразователя изменяющимися по величине калиброванными электрическими напряжениями, имитирующими изменение каждого в отдельности физического параметра эталонного образца и каждого в отдельности фактора окружающей среды, при этом пределы изменения калиброванных напряжений выбраны для изменения физических параметров от минимального до максимального значений, а для факторов - от нормального до предельно-допустимого значений, указанных в технических условиях на поверяемый преобразователь, и по полученным результатам автоматизированной поверки строят характеристики изменения всех выходных электрических сигналов поверяемого преобразователя в зависимости от изменения каждого в отдельности калиброванных напряжений, имитирующих n физические параметры и m факторы окружающей среды, анализируют полученные зависимости от физических параметров и от факторов окружающей среды и судят о точности, чувствительности и надежности поверяемого преобразователя, дополнительно на входы катушек поверяемого матричного преобразователя воздействуют одним из n калиброванных напряжений максимальной величины, соответствующей максимальному изменению значения одного из физических параметров, и модулируют это калиброванное напряжение одновременно всей суммой m калиброванных напряжений предельно-допустимых величин, а совокупное воздействие на поверяемый преобразователь продолжают непрерывно до времени появления сбоя на соответствующем выходе этого преобразователя, причем продолжительность времени от начала операции до времени появления сбоя считают полным ресурсом поверяемого матричного преобразователя в экстремальных условиях окружающей среды.
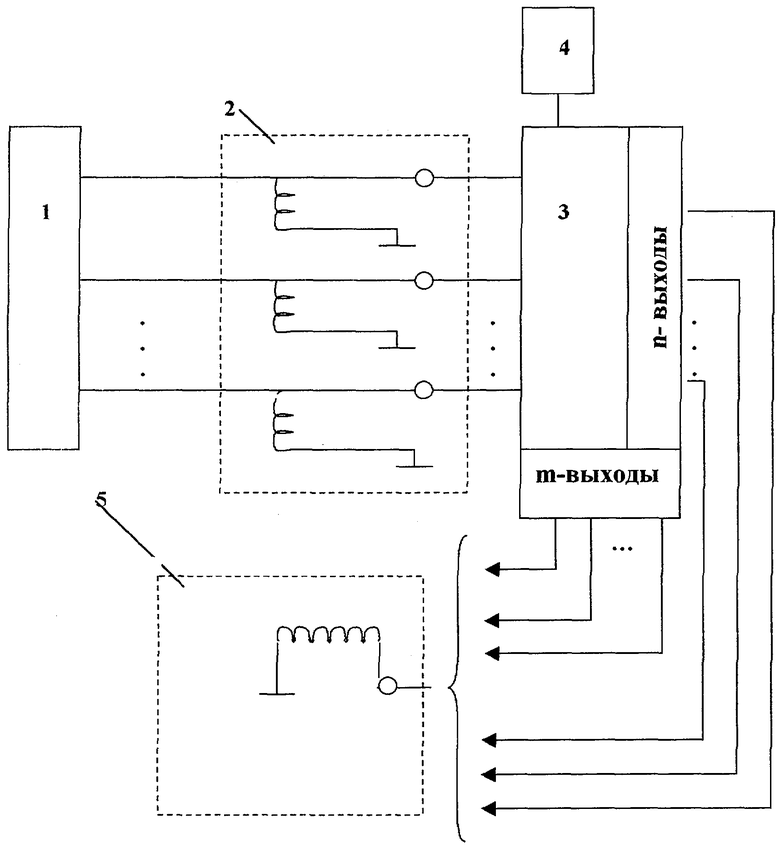
Предложенная автоматизированная технология реализуется в устройстве, приведенном на чертеже.
Схема устройства содержит источник 1 коммутированного тока переменной частоты для возбуждения n катушек индуктивности (чувствительных элементов) поверяемого матричного вихретокового преобразователя 2, процессорный узел 3 с видеомонитором 4 и электромагнитный интерфейс 5 для электромагнитной связи с n катушками матричного преобразователя 2. Конструктивно интерфейс 5 встроен в конструкцию поверяемого преобразователя 2.
Поверяемый матричный вихретоковый преобразователь 2 представляет собой электромагнитную матрицу, состоящую из n катушек индуктивности, различных в соответствии с задачей раздельного и независимого контроля физических параметров по электрическим и геометрическим параметрам, форме, местоположению и координатной ориентации катушки в матрице, что обеспечивает катушке матрицы разные по величине и направлению зоны чувствительности. Количество n катушек индуктивности в преобразователе 2 должно равняться, как правило, числу n измеряемых физических параметров. Несущая частота возбуждения n катушек индуктивности электромагнитной матрицы, являющихся входами преобразователя 2, выбирается не менее чем на порядок больше частоты коммутации. Коммутация обеспечивает поочередное (последовательное) возбуждение каждой катушки, что обуславливает устранение электромагнитного взаимовлияния n катушек индуктивности преобразователя 2 друг на друга. В результате возбуждения катушек индуктивности матрицы коммутирующим током переменной частоты в окрестности каждой из катушек создается поочередно электромагнитное поле на время, определяемое частотой коммутации.
Входы n процессорного узла 3 соединены с n выходами поверяемого преобразователя 2. Программное обеспечение процессорного узла 3 предназначено для содержания информационно-справочных данных на n измеряемые физические параметры эталонного образца и m факторы окружающей среды. Параметры n и факторы m инициируются в виде калиброванных электрических напряжений. Информация о соответствии калиброванных электрических напряжений определенным от первого до последнего физическому параметру и фактору, а также диапазоны изменения калиброванных напряжений содержатся в программном обеспечении. Диапазоны изменения электрических напряжений, имитирующих n физические параметры, приняты от минимальных до максимальных значений, а диапазоны изменения электрических напряжений, имитирующих m факторы окружающей среды, приняты от нормальных до предельно-допустимых значений. Диапазоны измеряемых физических параметров и предельно-допустимые значения факторов окружающей среды обязательно указаны в технических условиях на поверяемый преобразователь 2. Выходные сигналы поверяемого преобразователя 2 регистрируются на видеомониторе 4.
Электромагнитный интерфейс 5 представляет собой катушку индуктивности и предназначен для электромагнитной связи с катушками преобразователя 2. При возбуждении прокалиброванным электрическим напряжением интерфейса 5 в его окрестности создается также электромагнитное поле. Это поле, взаимодействуя с электромагнитными полями катушек электромагнитной матрицы поверяемого преобразователя 2, изменяет электрические параметры последних, что и вызывает адекватное изменение выходных электрических сигналов преобразователя 2 вследствие изменения значения калиброванного напряжения.
Выходные сигналы с поверяемого преобразователя 2 снимаются входами узла 3, в котором программно формируются зависимости выходных электрических сигналов от изменения значений физических параметров и факторов и запоминаются. Полученная информация отображается на видеомониторе 4.
Способ работает следующим образом.
На катушки индуктивности (чувствительные элементы) образцового матричного вихретокового преобразователя подают коммутирующий ток переменной частоты, который возбуждает последовательно с частотой коммутации каждую из катушек индуктивности образцового матричного преобразователя.
Зачем образцовый матричный преобразователь размещают на многопараметровом стенде напротив подвижного многопараметрового эталонного образца или набора однопараметровых образцов из токопроводящего материала на заданном зазоре и перемещают образец дискретно во взаимоперпендикулярных направлениях относительно образцового преобразователя в горизонтальной плоскости. Далее изменяют зазор между этим преобразователем и эталонным образцом на заданную величину и операцию повторяют аналогично выше приведенной. Операцию продолжают на других зазорах фиксированной величины. Во всех случаях выходные электрические сигналы с выходов образцового матричного преобразователя фиксируют, запоминают и строят поверочные характеристики в зависимости от изменения физических параметров.
Следующий этап способа заключается в том, что образцовый матричный преобразователь помещают в герметичную климатическую камеру и создают в ней последовательно условия, адекватные изменению последовательно каждого из факторов внешней окружающей среды. При этом информацию фиксируют, запоминают и строят выходные характеристики с выходов образцового матричного преобразователя от изменения каждого из факторов.
По полученным информационно-справочным экспериментальным данным создают программное обеспечение автоматизированной поверки, которое включает автоматические операции формирования n изменяющихся калиброванных электрических напряжений, пропорциональных изменению n физических параметров эталонного образца, и m изменяющихся калиброванных электрических напряжений, пропорциональных изменению m факторов окружающей среды. После проведения выше перечисленных технологических операций необходимость в использовании (применении) многопараметрового стенда и климатической камеры утрачивается и дальнейшие действия способа поверки для последующих поверяемых преобразователей осуществляется автоматизированно по созданному программному обеспечению.
В соответствии с автоматизированным обеспечением программно или по желанию оператора одновременно на все n входы поверяемого преобразователя воздействуют отдельным изменяющимся по величине калиброванным электрическим напряжением, эквивалентным по величине и характеру изменения определенному физическому параметру эталонного образца, и строят зависимости выходных электрических сигналов со всех выходов поверяемого преобразователя от данного определенного физического параметра. Поскольку каждая из катушек индуктивности поверяемого преобразователя в соответствии с задачей раздельного и независимого контроля физических параметров обладает разными электрическими и геометрическими параметрами, формой, местоположением и координатной ориентацией зоны чувствительности в электромагнитной матрице поверяемого преобразователя, то этот определенный физический параметр вызовет наибольшее изменение выходного электрического сигнала на выходе той катушки (выходе преобразователя), которая наиболее чувствительна к данному физическому параметру.
Процедуру поверки с другим калиброванным электрическим напряжением, эквивалентным по величине и характеру изменения другому физическому параметру, осуществляют аналогично. Этот другой физический параметр также вызовет наибольшее изменение выходного электрического сигнала поверяемого матричного преобразователя на другом его выходе, т.е. будет соответствовать другой измерительной катушке.
Операцию поверки повторяют последовательно по другим оставшимся n физическим параметрам, которые в свою очередь также будут вызывать наибольшее изменение электрических параметров тех катушек, которые в соответствии с задачей контроля предназначены для контроля данных физических параметров. После чего полученные зависимости выходных электрических сигналов, соответствующих изменению n физических параметров, анализируют и определяют по ним метрологические характеристики поверяемого матричного преобразователя в статике.
Приведенную технологию осуществляют аналогично с каждым из m факторов окружающей среды, т.е. воздействуют отдельным изменяющимся калиброванным напряжением одновременно на все входы поверяемого преобразователя и так же строят индивидуальные зависимости выходных электрических сигналов с выходов поверяемого преобразователя от изменения факторов. В этом случае изменение зависимостей от изменения фактора температуры будет наибольшим, так как электрические параметры катушек изменяются намного сильнее от доминирующего фактора, чем от других рассматриваемых факторов. Влияние остальных факторов на электрические параметры катушек меньше и соизмеримо, поэтому бывает достаточным процедуру осуществить по тому фактору, который вызывает наибольшее изменение выходного электрического сигнала с поверяемого преобразователя. По полученным характеристикам с выходов поверяемого преобразователя в зависимости от изменения факторов, вызывающих изменение электрических параметров катушек электромагнитной матрицы поверяемого преобразователя, определяют степень влияния того или иного фактора на поверяемый преобразователь, а по величине предельно-допустимой нагрузки от фактора выявляют стойкость поверяемого преобразователя к фактору окружающей среды.
Затем переходят к групповой процедуре способа. Для этого на входы катушек матричного преобразователя дополнительно воздействуют одним из n калиброванных напряжений максимальной величины, соответствующей максимальному изменению значения одного из конкретных физических параметров, и модулируют это калиброванное напряжение одновременно всей суммой m калиброванных напряжений предельно-допустимых величин. В этом случае согласно закону “принцип суперпозиции” в физике электромагнитных полей результирующий эффект от нескольких независимых воздействий факторов представляет собой сумму эффектов, вызываемых каждым воздействием фактора в отдельности (см. энциклопедию). Другими словами происходит наложение амплитуд калиброванных электрических напряжений и суммарный уровень калиброванного напряжения увеличивается, что имитирует воздействие суммы факторов. Это совокупное воздействие на преобразователь продолжают непрерывно до времени появления сбоя на соответствующем выходе преобразователя, при этом продолжительность времени от начала операции до времени появления сбоя считают полным ресурсом поверяемого матричного преобразователя.
Техническим результатом, на достижение которого направлено данное техническое решение, являются моделирование изменения физических параметров натурного объекта и факторов окружающей среды электромагнитным калиброванным электрическим напряжением и возможность определения полного эксплуатационного ресурса в условиях экстремальных климатических и механических воздействий, что в целом при использовании новой технологии обеспечит качество и надежность контролируемых многопараметровых объектов особенно ответственного, тем более техноопасного назначения. При этом новая технология экономична, поскольку не требует постоянного использования поверочного стендового оборудования и специальных климатических камер, инициирующих изменение физических параметров натурного объекта контроля и факторов окружающей среды.
Литература
1. В.Г.Запускалов, А.И.Маслов. Методика прогнозирования остаточного ресурса изделий. / Контроль. Диагностика. №9, 2003. С.30-31.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МНОГОПАРАМЕТРОВОГО КОНТРОЛЯ ОБЪЕКТОВ ПУТЕЙ СООБЩЕНИЯ | 1996 |
|
RU2082640C1 |
| СТЕНД ДЛЯ ПОВЕРКИ МНОГОПАРАМЕТРОВЫХ ВИХРЕТОКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПАРАМЕТРОВ ЖЕЛЕЗНОДОРОЖНЫХ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1996 |
|
RU2082641C1 |
| Способ поверки и калибровки приборов вихретокового контроля и устройство для его осуществления | 1988 |
|
SU1619152A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЙ ИЗДЕЛИЯ И ЭЛЕКТРОФИЗИЧЕСКИХ СВОЙСТВ ЕГО МАТЕРИАЛА | 2005 |
|
RU2294535C1 |
| ПЕРЕНОСНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОЙ ДИАГНОСТИКИ РЕНТГЕНОВСКИХ ТОЛЩИНОМЕРОВ | 2002 |
|
RU2219492C1 |
| Способ имитационной поверки средств измерения и комплекс для его осуществления | 2024 |
|
RU2838347C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗОНД ДЛЯ ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ МАТЕРИАЛА СТЕНКИ ТРУБЫ | 2005 |
|
RU2293981C1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕСТАЦИОНАРНЫХ ПЕРЕМЕЩЕНИЙ ЭЛЕКТРОПРОВОДЯЩИХ ОБЪЕКТОВ | 2014 |
|
RU2561792C1 |
| СПОСОБ ПОВЕРКИ ЭЛЕКТРОМАГНИТНЫХ УРОВНЕМЕРОВ И РАСХОДОМЕРОВ-УРОВНЕМЕРОВ | 2003 |
|
RU2249187C1 |
| Способ поверки вихретоковых толщиномеров | 1983 |
|
SU1093962A1 |
Изобретение относится к технике неразрушающего многопараметрового контроля, а именно к технологии метрологического обеспечения матричных вихретоковых преобразователей физических параметров, и предназначено для поверки и экспертизы метрологии, надежности и полного ресурса матричных вихретоковых преобразователей в экстремальных условиях климатических и механических воздействий окружающей среды. Сущность: на входы катушек матричного преобразователя воздействуют одним из n калиброванных напряжений максимальной величины, соответствующей максимальному изменению значения одного из физических параметров. Модулируют это калиброванное напряжение одновременно всей суммой m калиброванных напряжений предельно-допустимых величин. Совокупное воздействие на преобразователь продолжают непрерывно до времени появления сбоя на соответствующем выходе преобразователя. Продолжительность времени от начала операции до времени появления сбоя считают полным ресурсом поверяемого матричного преобразователя. Технический результат: моделирование изменения физических параметров натурного объекта и факторов окружающей среды электромагнитным калиброванным электрическим напряжением и возможность определения полного эксплуатационного ресурса в условиях экстремальных климатических и механических воздействий. 1 ил.
Способ определения метрологических показателей и надежности матричного вихретокового преобразователя в динамических условиях эксплуатации, заключающийся в возбуждении катушек индуктивности образцового матричного преобразователя коммутирующим током переменной частоты, в размещении образцового матричного преобразователя сначала на многопараметровом стенде, затем в климатической камере и в обоих случаях в раздельном снятии с выходов образцового матричного преобразователя зависимостей изменения выходных электрических сигналов от изменения каждого из n физических параметров эталонных образцов и каждого из m факторов окружающей среды соответственно, а полученные информационно-справочные экспериментальные данные запоминают и создают по ним программное обеспечение автоматизированного исследования последующих поверяемых матричных преобразователей, позволяющее обеспечить поочередное электромагнитное воздействие одновременно на все катушки индуктивности поверяемого матричного преобразователя изменяющимися по величине калиброванными электрическими напряжениями, имитирующими изменение каждого в отдельности физического параметра эталонного образца и каждого в отдельности фактора окружающей среды, при этом пределы изменения калиброванных напряжений выбраны для изменения физических параметров от минимального до максимального значений, а для факторов - от нормального до предельно допустимого значений, указанных в технических условиях на поверяемый преобразователь, и по полученным результатам автоматизированной поверки строят характеристики изменения всех выходных электрических сигналов поверяемого преобразователя в зависимости от изменения каждого в отдельности калиброванных напряжений, имитирующих n физических параметров и m факторов окружающей среды, анализируют полученные зависимости от физических параметров и от факторов окружающей среды и судят о точности, чувствительности и надежности поверяемого преобразователя, отличающийся тем, что дополнительно на входы катушек матричного поверяемого преобразователя воздействуют одним из n калиброванных напряжений максимальной величины, соответствующей максимальному изменению значения одного из физических параметров, и модулируют это калиброванное напряжение одновременно всей суммой m калиброванных напряжений предельно допустимых величин, а совокупное воздействие на поверяемый преобразователь продолжают непрерывно до времени появления сбоя на соответствующем выходе этого преобразователя, причем продолжительность времени от начала операции до времени появления сбоя считают полным ресурсом поверяемого матричного преобразователя в экстремальных условиях окружающей среды.
| ЗАПУСКАЛОВ В.Г., МАСЛОВ А.И., Методика прогнозирования остаточного ресурса изделий, Контроль | |||
| Диагностика, № 9, 2003, с.30-31 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТРОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ОДНОТИПНЫХ СРЕДСТВ ИЗМЕРЕНИЙ В ГРУППЕ | 1997 |
|
RU2123190C1 |
| Способ поверки и калибровки приборов вихретокового контроля и устройство для его осуществления | 1988 |
|
SU1619152A1 |
| СТЕНД ДЛЯ ПОВЕРКИ МНОГОПАРАМЕТРОВЫХ ВИХРЕТОКОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ ПАРАМЕТРОВ ЖЕЛЕЗНОДОРОЖНЫХ КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1996 |
|
RU2082641C1 |

