Предлагаемая система относится к транспортной технике, в частности к устройствам для предотвращения недозволенного пользования транспортными средствами, например автомобилями.
Известны противоугонные устройства для транспортных средств (патенты РФ N2006394, 2011574, 2018128, 2021927, 2033352, 2033353, 2033354, 2040416, 2042548, 2058966, 2061320, 2061321, 2186698: Дикарев В.И. и др. Защита транспортных средств от угона и краж. СПб., 2000 г. и др.).
Из известных устройств и систем наиболее близкой к предлагаемой системе является “Противоугонная система для транспортных средств” (патент РФ N2186698, В 60 R 25/10, 2001), которая и выбрана в качестве ближайшего аналога.
Указанная система содержит на транспортном средстве источник питания, токоограничивающий резистор, дистанционный переключатель, светодиод, геркон, ключ зажигания, генератор прерывистых сигналов, электромагнитное реле, задающий генератор, фазовый манипулятор, передатчик и передающую антенну.
Приемный пункт на летательном аппарате содержит приемные антенны, блок поиска, гетеродины, смесители, усилители первой промежуточной частоты, обнаружитель, измерители ширины спектра, удвоитель частоты, блок сравнения, пороговый блок, линию задержки, ключи, измеритель частоты, блоки регистрации, усилитель второй промежуточной частоты, частотный детектор, триггер, перемножители, узкополосные фильтры и фазовые детекторы. В системе реализуется фазовый метод пеленгации угнанных транспортных средств (ТС) с помощью пяти приемных антенн, расположенных в виде несимметричнного геометрического креста. Получив на приемном пункте информацию о частоте, модулирующем коде и местоположении угнанного ТС, сотрудники милиции принимают меры по задержанию угонщика. Информация с летательного аппарата передается по радиоканалу в группы поиска и захвата. Однако известная противоугонная система обеспечивает точную и однозначную пеленгацию угнанного транспортного средства и не позволяет измерять дальность R, радиальную скорость  и угловые скорости передвижения угнанного ТС по азимуту α и углу места β и тем самым определить модуль вектора скорости угнанного ТС:
и угловые скорости передвижения угнанного ТС по азимуту α и углу места β и тем самым определить модуль вектора скорости угнанного ТС:
Технической задачей изобретения является расширение функциональных возможностей системы путем определения дальности R и измерения радикальной скорости  и угловых скоростей угнанного транспортного средства по азимуту
и угловых скоростей угнанного транспортного средства по азимуту  и углу места
и углу места  .
.
Поставленная задача решается тем, что противоугонная система для транспортных средств, содержащая расположенные на транспортном средстве генератор прерывистых сигналов, один из питающих выводов которого через ключ зажигания соединен с плюсовой шиной источника питания, электромагнитное реле, обмотка которого подключена к выходу генератора прерывистых сигналов, а размыкающий контакт включен в цепь катушки зажигания последовательно с ключом зажигания, последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом генератора прерывистых сигналов, и передатчик, связанный с передающей антенной, дистанционный переключатель с двумя противофазными обмотками и размыкающими и замыкающими контактами, геркон, токоограничивающий резистор и светодиод, при этом с плюсовой шиной источники питания соединены непосредственно один из выводов токоограничивающего резистора и обмоток дистанционного переключателя, а через ключ зажигания - один из питающих выводов задающего генератора, фазового манипулятора и передатчика, размыкающий и замыкающий контакты первой обмотки дистанционного переключателя включены между одним из выводов геркона и вторыми выводами соответственно первой и второй обмоток дистанционного переключателя, второй размыкающий контакт второй обмотки дистанционного переключателя включен между вторым питающим выводом генератора прерывистых сигналов и минусовой шиной источника питания, первый размыкающий контакт второй обмотки дистанционного переключателя включен между другим выводом токоограничивающего резистора и анодом светодиода, катод которого и другой вывод геркона непосредственно, а другие питающие выводы задающего генератора, фазового манипулятора и передатчика через размыкающий контакт второй обмотки дистанционного переключателя соединены с минусовой шиной источника питания, и расположенные на приемном пункте измерительный канал, состоящий из последовательно включенных блока поиска, первого гетеродина, первого смесителя, второй вход которого соединен с выходом приемной антенны, усилителя первой промежуточной частоты, удвоителя частоты, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом усилителя первой промежуточной частоты, порогового блока, второй вход которого соединен с выходом линии задержки, первого ключа, второй вход которого соединен с выходом усилителя первой промежуточной частоты, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, частотного детектора, триггера и первого блока регистрации, и из последовательно подключенных к выходу первого гетеродина второго ключа, второй вход которого соединен с выходом порогового блока, первого измерителя частоты и второго блока регистрации, при этом выход порогового блока дополнительно соединен с входами линии задержки и блока поиска, и четыре пеленгационных канала, каждый из которых состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина измерительного канала, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты измерительного канала, узкополосного фильтра, фазового детектора и блока регистрации, при этом вторые входы фазовых детекторов первого и третьего пеленгационных каналов соединены с выходом второго гетеродина, второй вход фазового детектора второго пеленгационного канала соединен с выходом узкополосного фильтра первого пеленгационного канала, второй вход фазового детектора четвертого пеленгационного канала соединен с выходом узкополосного фильтра третьего пеленгационного канала, приемный пункт размещен на борту летательного аппарата, приемные антенны размещены в виде геометрического креста, в пересечении которого помещена приемная антенна измерительного канала, общая для приемных антенн пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, приемный пункт системы снабжен пятым, шестым и седьмым перемножителями, пятым, шестым, седьмым и восьмым узкополосными фильтрами, пятым и шестым фазовыми детекторами, вторым, третьим и четвертым частотомерами, седьмым и восьмым смесителями, шестым усилителем первой промежуточной частоты, блоком эталонных частот, вычислительным блоком и седьмым блоком регистрации, причем к выходу приемной антенны первого пеленгационного канала последовательно подключены пятый перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты второго пеленгационного канала, пятый узкополосный фильтр, пятый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, шестой фазовый детектор, второй вход которого соединен с выходом фазового детектора первого пеленгационного канала, вычислительный блок, второй вход которого соединен с выходом пятого фазового детектора, и седьмой блок регистрации, к выходу приемной антенны измерительного канала последовательно подключены седьмой смеситель, второй вход которого соединен с первым выходом блока эталонных частот, шестой усилитель первой промежуточной частоты, восьмой смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, шестой узкополосный фильтр и второй частотомер, выход которого соединен с вторым входом седьмого блока регистрации и третьим входом вычислительного блока, четвертый вход которого соединен с выходом первого частотомера к выходу усилителя первой промежуточной частоты второго пеленгационного канала последовательно подключены шестой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, седьмой узкополосный фильтр и третий частотометр, выход которого соединен с пятым входом вычислительного блока, к выходу усилителя первой промежуточной частоты четвертого пеленгационного канала последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, восьмой узкополосный фильтр и четвертый частотомер, выход которого соединен с шестым входом вычислительного блока, приемные антенны размещены на борту летательного аппарата в виде симметричного геометричного креста.
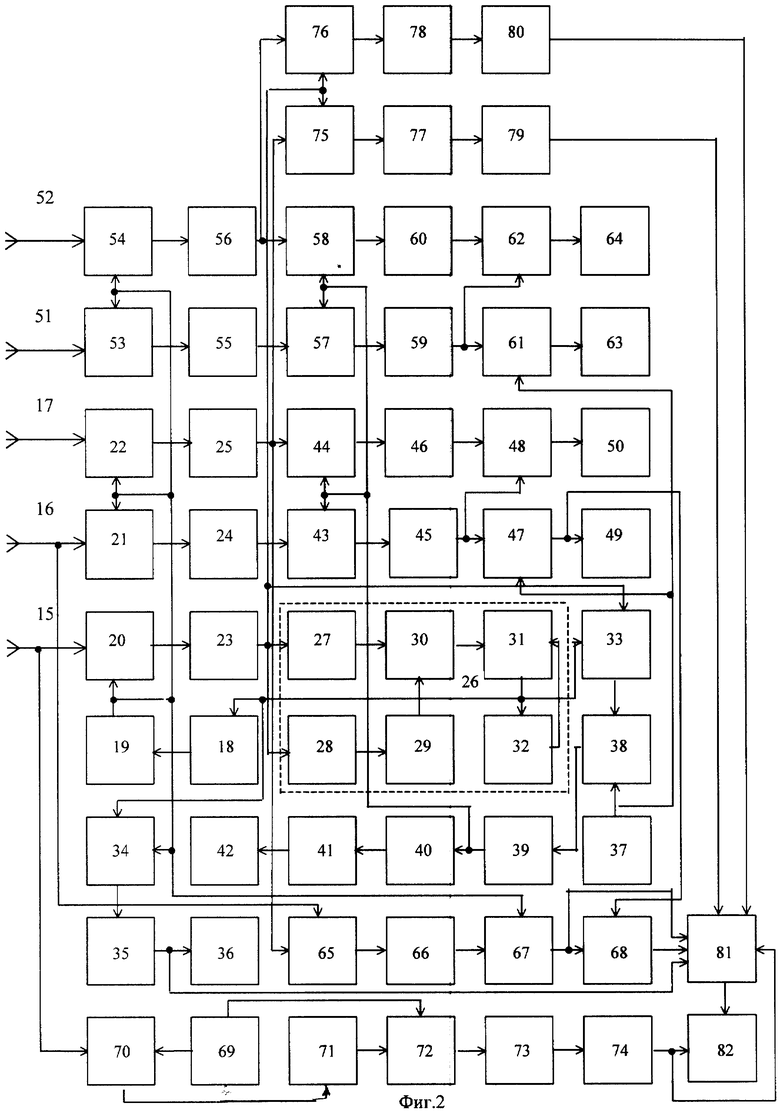
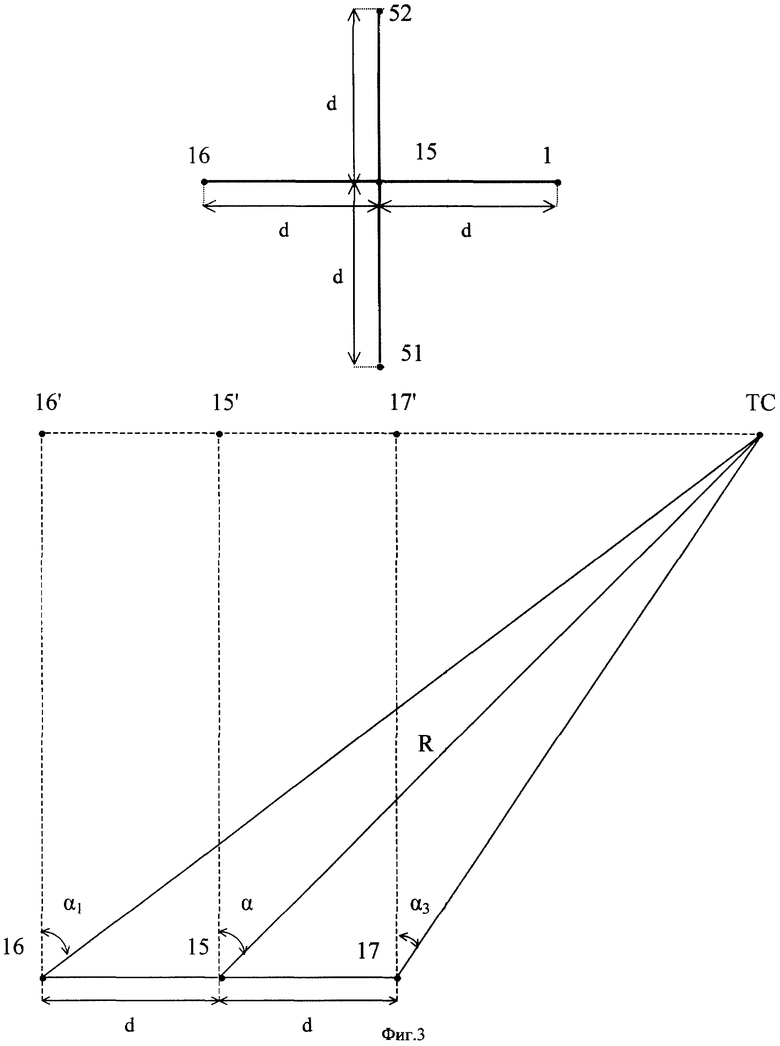
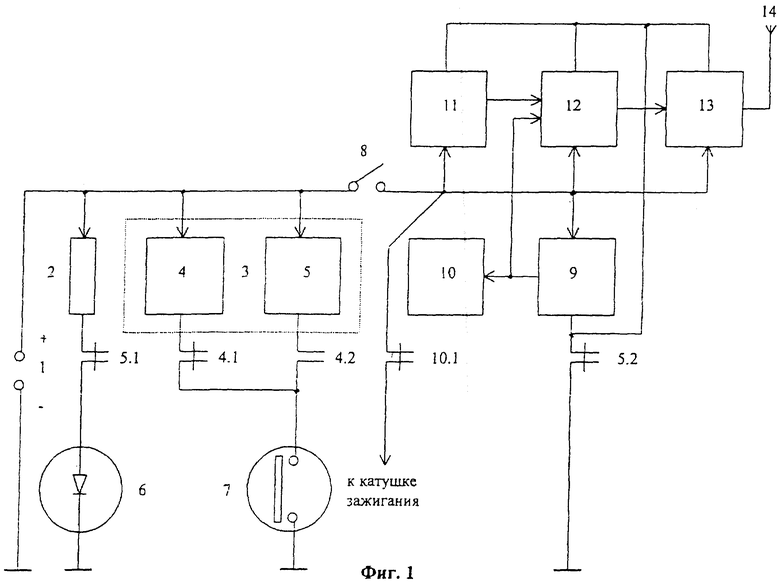
Структурная схема оборудования., устанавливаемого на транспортном средстве, представлена на фиг.1. Структурная схема приемного пункта, размещаемого на борту летательного аппарата, изображена на фиг.2. На фиг.3 изображено взаимное положение приемных антенн и угнанного транспортного средства. На фиг.4. представлены временные диаграммы, помнящие работу системы.
Противоугонная система для транспортных средств состоит из оборудования, устанавливаемого на транспортном средстве, и приемного пункта, размещаемого на борту летательного аппарата.
Оборудование, устанавливаемое на транспортном средстве, содержит: источник 1 питания, токоограничивающий резистор 2, дистанционный переключатель 3 с двумя противофазными обмотками 4 и 5, светодиод 6, геркон 7, ключ 8 зажигания, генератор 9 прерывистых сигналов, электромагнитное реле 10, задающий генератор 11, фазовый манипулятор 12, передатчик 13 и передающую антенну 14.
Приемный пункт, размещаемый на борту летательного аппарата, содержит: первую 15, вторую 16, третью 17, четвертую 51 и пятую 52 приемные антенны; блок 18 поиска, первый гетеродин 19, смесители 20, 21, 22, 38, 53, 54, 70 и 72, усилители 23, 24, 25, 55, 56 и 71 первой промежуточной частоты, обнаружитель 26, измерители 27 и 29 ширины спектра, блок 30 сравнения, пороговый блок 31, линию 32 задержки, первый 33 и второй 34 ключи, измерители 35, 74, 79 и 80 частоты, блоки 36, 42, 49, 50, 63, 64 и 82 регистрации, второй гетеродин 37, усилитель 39 второй промежуточной частоты, часточный детектор 40, триггер 41, перемножители 43, 44, 57, 58, 65, 75 и 76, узкополосные фильтры 45, 46, 59, 60, 66, 73, 77 и 78, фазовые детекторы 47, 48, 61, 62, 67 и 68, блок 69 эталонных частот и вычислительный блок 81.
Система работает следующим образом.
Транспортное средство может находиться в двух режимах: в режиме нормальной эксплуатации, когда противоугонная система выключена, и в режиме охраны, когда противоугонная система включена.
В первом режиме транспортное средство переводится путем поднесения постоянного магнита, выполненного, например, в виде брелка, к геркону 7, установленному за обшивкой транспортного средства в месте, известном только владельцу. При этом обмотка 4 дистанционного переключателя 3 через замкнутые контакты 4.1 и геркон 7 оказывается подключенной к источнику 1 питания. Дистанционный переключатель 3 переводится в свое первое устойчивое состояние, при котором контакты 4.2 замыкаются, а контакты 4.1 размыкаются. Контакты 5.1 и 5.2 находятся в разомкнутом состоянии.
При включении зажигания напряжение питания подается на катушки зажигания и двигатель работает в нормальном режиме, неисправность в цепи зажигания отсутствует.
Для перевода транспортного средства в режим охраны, то есть включения противоугонной системы, владелец опять подносит постоянный магнит к геркону 7. В этом случае срабатывает обмотка 5 и дистанционный переключатель 3 переводится во второе устойчивое состояние, при котором контакты 4.1, 5.1 и 5.2 замыкаются, а контакты 4.2 размыкаются. Данная ситуация показана на фиг 1. При этом напряжение питания через токоограничивающий резистор 2 и замкнутые контакты 5.1 поступает на светодиод 6, который срабатывает и сигнализирует владельцу о том, что противоугонная система включена.
При включении зажигания через замкнутые контакты 5.2 корпус транспортного средства подключается к вторым входам генератора 9 прерывистых сигналов, задающего генератора 11, фазового манипулятора 12 и передатчика 13.
Генератор 9 начинает вырабатывать прямоугольные импульсы
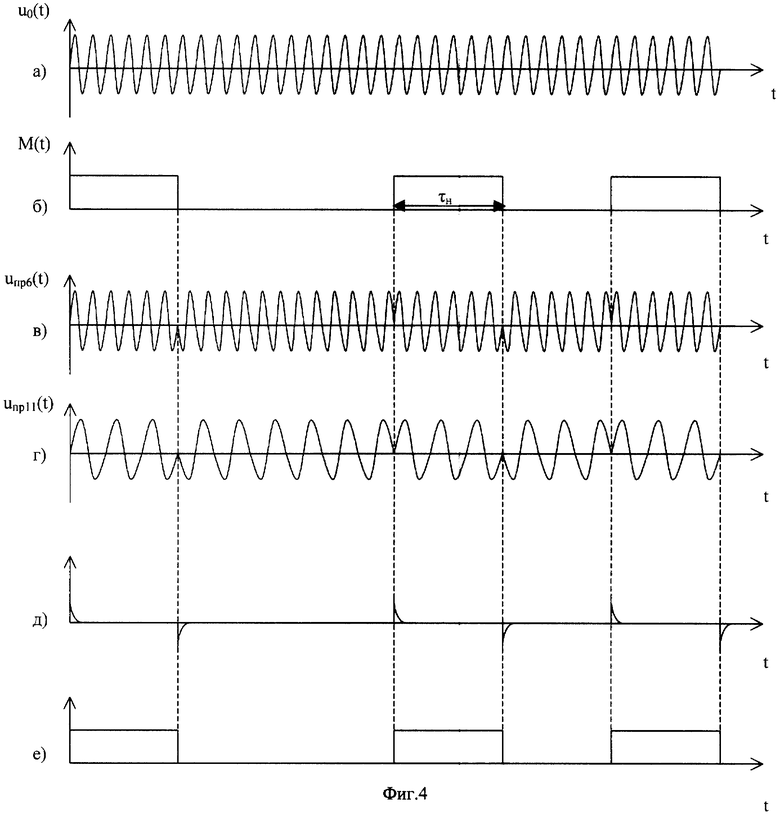
(фиг.4,б), периодически размыкая и замыкая контакты 10.1 электромагнитного реле 10, а задающий генератор 11 начинает вырабатывать гармоническое напряжение (фиг.4,а). При этом запуск двигателя осуществляется в период замкнутого состояния контактов 10.1, но угон невозможен, так как через некоторое время генератор 9 подает импульс, контакты 10.1 размыкаются, система зажигания и двигатель отключаются.
Лицо, пытающееся совершить угон, начинает последовательно искать причину отказа в работе двигателя. При этом исходит из того, что большинство неисправностей приходится на систему зажигания. Обычно начинают проверку системы зажигания, так как убедиться в ее исправности наиболее просто (по наличию искры на проводах высокого напряжения, подходящих к свечам).
Допустим лицо, пытающееся совершить угон, поднесло провод высокого напряжения к массе и прокручивает двигатель. Если при этом искра есть (период, когда генератор 9 импульсов не подает), то угонщик переключается на поиск неисправности в системе питания и начинает последовательно проверять участки питания, то есть уходит в сторону от правильного пути поиска.
Если при проверке искра отсутствует (период подачи генератором 9 импульса) то угонщик исследует цепь электрооборудования и ищет поврежденный участок до перерыва в подаче импульса и исчезновения неисправности. Это служит указанием для замены якобы неисправного участка цепи, то есть опять вводит в заблуждение. Поиск неисправности усложняется.
Следовательно, отсутствие звуковой сигнализации не вызывает беспокойства и позволяет злоумышленнику длительное время заниматься своей преступной деятельностью. При этом угонщик, предприняв неоднократные попытки запустить двигатель, все же имеет реальную возможность обнаружить наличие противоугонной системы, раскрыть принцип ее работы и совершить угон транспортного средства.
Для предотвращения угона транспортного средства используется радиоканал, по которому передается тревожная информация на приемный пункт, где принимаются меры по организации задержания угонщика.
При замыкании контактов 5.2 напряжение питания подается на генератор 9 прерывистых сигналов, задающий генератор 11, фазовый манипулятор 12 и передатчик 13 через замкнутый ключ 8 зажигания.
Гармоническое напряжение (фиг.4,а)
uo(t)=UoCos(2π fot+ϕ o), 0≤ t≤ Tc,
где Uo, fo, ϕ о, Тc - амплитуда, несущая частота и начальная фаза и длительность напряжения; с выхода задающего генератора 11 поступает на первый вход фазового манипулятора 12, на второй вход которого подаются прямоугольные импульсы (модулирующий код M(t)) (фиг.4,б). На выходе фазового манипулятора 12 образуется фазоманипулированный (ФМн) сигнал,
u’o(t)=UoCos[2π fot+ϕ к(t)+ϕ о], 0≤ t≤ Тc,
где ϕ к(t)={о,π } - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом М(t) (фиг.4,б), причем ϕ к(t)=const при κ τ u<t<(k+1)τ u и может измениться скачком при t=κ τ u, то есть на границах между элементарными посылками (K=1, 2, ... N-1); τ u, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тc(Тс=Nτ u.), который после усиления в передатчике 13 излучается антенной 14 в эфир и принимается приемным пунктом, размещенным на борту летательного аппарата
На приемном пункте просмотр заданного частотного диапазона Df и поиск ФМн-сигналов осуществляется с помощью блока 18 поиска, который периодически с периодом Тп по пилообразному закону перестраивает частоту гетеродина 19. Ключи 33, 34 в исходном состоянии всегда закрыты.
Принимаемые ФМн-сигналы:
u1(t)=UcCos[2π fct+ϕ к(t)+ϕ 1]
u2(t)=UcCos[2π fct+ϕ к(t)+ϕ 2]
u3(t)=UcCos[2π fct+ϕ к(t)+ϕ 3]
u4(t)=UcCos[2π fct+ϕ к(t)+ϕ 4]
u5(t)=UcCos[2π fct+ϕ к(t)+ϕ 5], 0≤ t≤ Tc,
с выходов приемных антенн 15-17, 51 и 52 поступают на первые входы смесителей 20-22, 53, 54 соответственно, на вторые входы которых подается напряжение линейно изменяющейся частоты с выхода гетеродина 19
uг1(t)=Uг1 Cos(2fг1t+π ϒ 1t2+ϕ г1), 0≤ t≤ Tп,
где Uг1, fг1, ϕ г1, Тп - амплитуда, начальная частота, начальная фаза и период повторения напряжения гетеродина 19;
ϒ 1=Df/Tп - скорость изменения частоты гетородина 19.
На выводах смесителей 20-22, 53 и 54 образуются напряжения комбинационных частот. Усилителями 23-25, 55 и 56 выделяются напряжения первой промежуточной частоты:
Uпр1(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)-π ϒ 1t2+ϕ пр1]
Uпр2(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)-π ϒ 1t2+ϕ пр2]
Uпр3(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)-π ϒ 1t2+ϕ пр3]
Uпр4(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)-π ϒ 1t2+ϕ пр4]
Uпр5(t)=Uпр1Cos[2π fпр1t+ϕ k(t)-π ϒ 1t2+ϕ пр5], O≤ t≤ Tc,
где uпр1=1/2K1UcUг1:
K1 - коэффициент передачи смесителей
fпр1=fс-fг1 = первая промежуточная частота:
ϕ пр1=ϕ 1-ϕ г1;
ϕ пр2=ϕ 2-ϕ г1;
ϕ пр3=ϕ 3-фг1;
ϕ пр4=ϕ 4-ϕ г1;
ϕ пр5=ϕ 5-ϕ г1;
Напряжения uпр1(t) с выхода усилителя 23 первой промежуточной частоты поступает на вход обнаружителя 26, состоящего из измерителей 27 и 29 ширины спектра, удвоителя 28 частоты, блока 30 сравнения, порогового блока 31 и линии 32 задержки.
На выходе удвоителя 28 частоты образуется напряжение
u6(t)=Uпр1 Cos(4π fпр1t-2π ϒ 1t2+2ϕ пр1),
0≤ t≤ Тc,
в котором фазовая манипуляция уже отсутствует.
Ширина спектра второй гармоники Δ f2 определяется длительностью Тс сигнала. (Δ f2=1/Тс). Тогда как ширина спектра Δ fc ФМн-сигнала первой промежуточной частоты определяется длительностью τ u его элементарных посылок (Δ fc=1/τ u).
Следовательно, при умножении первой промежуточной частоты на два спектр ФМн - сигнала “сворачивается” в N раз (Δ fc/Δ f2=N). Это обстоятельство и позволяет обнаружить и отселектировать ФМн-сигнал даже тогда, когда его мощность на входе приемного устройства меньше мощности шумов и помех.
Ширина спектра Δ fc ФМн-сигнала измеряется с помощью измерителя 27 ширины спектра, а ширина спектра Δ f2 второй гармоники сигнала u6(t) измеряется с помощью измерителя 29 ширины спектра. Напряжения U1 и U2, пропорциональные Δ fc и Δ f2 соответственно, с выходов измерителей 27 и 29 ширины спектра поступают на два входа блока 30 сравнения. Так как U1>>U2, то на выходе блока 30 сравнения формируется постоянное напряжение, которое сравнивается с пороговым уровнем Uпор в пороговом блоке 31. Пороговый уровень Uпор выбирается таким образом, чтобы этот уровень не превышали случайные помехи. Пороговый уровень Uпор превышается только при обнаружении сложного ФМн-сигнала. При превышении порогового уровня Uпор в пороговом блоке 31 формируется постоянное напряжение, которое поступает на управляющие входы ключей 33 и 34, открывая их, на вход линии 32 задержки и на управляющий вход блока 18 поиска, переводя его в режим остановки. С этого момента времени просмотр заданного частотного диапазона Df и поиск ФМн-сигналов прекращается на время анализа и регистрации обнаруженного ФМн-сигнала, которое определяется временем задержки τ з линии 32.
Частота гетеродина 19 измеряется измерителем 35 частоты и фиксируется блоком 36 регистрации. Зная частоту перестраиваемого гетеродина в момент обнаружения ФМн-сигнала, можно определить и несущую частоту fc обнаруженного ФМн-сигнала.
Транспортные средства определенных территорий и районов могут иметь свои несущие частоты, что является дополнительным признаком опознавания угнанного транспортного средства.
При прекращении перестройки гетеродинов 19 усилителями 23-25, 55 и 56 первой промежуточной частоты выделяются следующие напряжения:
Uпр6(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)+ϕ пр1]
Uпр7(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)+ϕ пр2]
Uпр8(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)+ϕ пр3]
Uпр9(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)+ϕ пр4]
Uпр10(t)=Uпр1 Cos[2π fпр1t+ϕ k(t)+ϕ пр5], 0≤ t≤ Tc.
Напряжения uпр7(t)-Uпр10(t) с выходов усилителей 24, 25, 55 и 56 первой промежуточной частоты поступают на первые входы перемножителей 43, 44, 57 и 58 соответственно.
Напряжение uпр6(t) (фиг.4,б) с выхода усилителя 23 первой промежуточной частоты через открытый ключ 33 поступает на первый вход смесителя 38, на второй вход которого подается напряжение второго гетеродина 37, частота которого стабилизирована кварцем
uг2(t)=Uг2 Cos(2π fг2t+ϕ г2),
где Uг2, fг2, ϕ г2 - амплитуда, частота и начальная фаза напряжения гетеродина 37.
На выходе смесителя 38 образуются напряжения комбинационных частот. Усилителем 39 выделяется напряжение второй промежуточной частоты (фиг.4,г)
Uпр11(t)=Uпр2 Cos[2π fпр2t+ϕ k(t)+ϕ пр11],
где Uпр2=1/2K1Uпр1Uг2;
fпр2=fпр1-fг2 - вторая промежуточная частота;
ϕ пр11=ϕ пр1-ϕ г2, которое поступает на вход частотного детектора 40.
На выходе последнего образуются короткие разнополярные импульсы (фиг.4,д), соответствующие моментам скачкообразного изменения фазы принимаемого ФМн-сигнала второй промежуточной частоты uпр11(t) (фиг.4,г). Указанные импульсы поступают на вход триггера 41. Каждым положительным коротким импульсом триггер 41 переводится в одно устойчивое состояние, а каждым отрицательным коротким импульсом - в другое устойчивое состояние. На выходе триггера 41 формируются прямоугольные импульсы (фиг.4,е), соответствующие модулирующему коду M(t) (фиг.4,б). Эти импульсы фиксируются блоком 42 регистрации. При этом каждое транспортное средство имеет свой модулирующий код, который состоит из адресной и информационной частей. Адресная часть состоит из n элементарных посылок и используется для передачи сведений, например, о номере стоянки, гаража, района и т.д. Информационная часть состоит из m элементарных посылок (m=N-n) и используется для передачи сведений о номерном знаке транспортного средства и его владельца. Причем модулирующий код M(t) выделяется из принимаемого ФМн-сигнала без традиционного опорного напряжения. Для этого используются структурные свойства ФМн-сигналов, частотный детектор 40 и триггер 41.
Пеленгация транспортного средства, подвергающегося угону или угнанного, осуществляется фазовым методом, которому свойственно противоречие между требованиями точности измерений и однозначности отсчета углов. Для разрешения этого противоречия используется многошкальный метод пеленгации.
Напряжение uпр11(t) с выхода усилителя 39 второй промежуточной частоты одновременно поступает на вторые входы перемножителей 43, 44, 57 и 58, на выходах которых образуются гармонические напряжения:
u7(t)=U7 Cos(2π fг2t+ϕ г2+Δ ϕ 1),
u8(t)=U7 Cos(2π fг2t+ϕ г2-Δ ϕ 2),
u9(t)=U7 Cos(2π fг2t+ϕ г2+Δ ϕ 3),
u10(t)=U7 Cos(2π fг2t+ϕ г2-Δ ϕ 4), 0≤ t≤ Тс,
где u7=1/2К2Uпр1Uпр2:
К2 - коэффициент передачи перемножителей.
Δ ϕ 1=ϕ 2-ϕ 1=2π d/λ Cosα ,
Δ ϕ 2=ϕ 3-ϕ 1=2π d/λ Cosα ,
Δ ϕ 3=ϕ 4-ϕ 1=2π d/λ Cosβ ,
Δ ϕ 4=ϕ 5-ϕ 1=2π d/λ Cosβ ,
α , β - угловые координаты транспортного средства (азимут и угол места).
Указанные напряжения выделяются узкополосными фильтрами 45, 46, 59, 60 и поступают на первые входы фазовых детекторов 47, 48, 61, 62 соответственно. На вторые входы фазовых детекторов 47 и 61 подается напряжение uг2(t) второго гетеродина 37. На вторые входы фазовых детекторов 48 и 62 подаются гармонические напряжения u7(t) и u9(t) с выходов узкополосных фильтров 45 и 59. Знаки “+” и “-” перед фазовыми сдвигами Δ ϕ 2 и Δ ϕ 4 соответствуют диаметрально противоположным положениям антенн 16 и 17, 51 и 52 относительно антенны 15. На выходах фазовых детекторов 47, 48, 61 и 62 образуются постоянные напряжения:
uн1(α )=Uн1 CosΔ ϕ 1,
uн2(α )=Uн2 CosΔ ϕ 5,
uн3(β )=Uн1 СоsΔ ϕ 3,
uн4(β )=Uн2 CosΔ ϕ 6,
где Uн1=1/2 К3U7Uг2:
Uн2=1/2К2U
Δ ϕ 5=Δ ϕ 1+Δ ϕ 2=2π 2d/λ Cosα :
Δ ϕ 6=Δ ϕ 3+Δ ϕ 4=2π 2d/λ Cosβ ;
которые фиксируются блоками 49, 50, 63 и 64 регистрации.
Приемные антенны 15, 16, 17, 51 и 52 размещаются таким образом, что измерительные базы образуют симметричный геометрический крест, в пересечении которого помещается антенна 15 измерительного канала (фиг.3). При этом меньшие базы d образуют грубые, но однозначные шкалы пеленгации, а большие базы 2d - точные, но неоднозначные шкалы пеленгации:
d/λ <1/2≤2d/λ .
Зная высоту h полета летательного аппарата и измерив угловые координаты α и β , можно точно и однозначно определить местоположение угнанного транспортного средства.
Принимаемый ФМн-сигнал из (t) первого пеленгационного канала поступает на первый вход перемножителя 65, на второй вход которого подается напряжение uпр3(t) первой промежуточной частоты второго пеленгационного канала в азимутальной плоскости. Из полученного напряжения узкополосным фильтром 66 выделяется гармоническое колебание на частоте fг1 первого гетеродина с сохранением фазовых соотношений.
u11(t)=U11 Cos(2π fг1t+ϕ г1+Δ ϕ 6), 0≤ t≤ Тс,
где U11=1/2К2UcUпр1:
Δ ϕ 6=ϕ 2-ϕ 3=2π d/λ Sinα 3 (фиг.3).
Это напряжение поступает на первый вход фазового детектора 67, на второй вход которого подается напряжение гетеродина 19 uг1(t). Фазовый детектор 67 обеспечивает измерение фазового сдвига Δ ϕ 6, Фазовый детектор 68 обеспечивает измерение разности разностей фаз
Δ (Δ ϕ 1-Δ ϕ 6)=2π d/λ (Sinα 1-Sinα 3).
Выразим Sinα 1 и Sinα 3 через стороны прямоугольных треугольников 16, 161, Тc и 15, 151, Тс, получим


где R - дальность до транспортного средства.
Выше приведенные выражения можно записать в приближенном виде:
Sinα 1≈Sinα +d/RCos2α;
Sinα 3≈Sinα -d/RCos2α.
Значение разности разностей фаз в приближенном виде выглядит следующим образом:
Δ (Δ ϕ 1-Δ ϕ 6)=2π d/λ 2d/RCos2α.
Искомая дальность R до транспортного средства определяется в вычислительном блоке 81 по следующей формуле:
R=4π d2/λ Δ (Δ ϕ 1-Δ ϕ 6)Cos2α.
По измеренным значениям азимута α , угла места β и дальности R уточняется местоположение угнанного транспортного средства.
Для измерения радиальной скорости движения угнанного транспортного средства используется эффект Доплера и двойное преобразование принимаемого сигнала с использованием двух эталонных частот f1, f2 и частоты подставки Fo, которую вводят для определения знака доплеровского смещения Fq.
Сущность эффекта Доплера заключается в том, что частота fc принимаемых колебаний отличается от частоты fo излучаемых колебаний, если излучатель и приемник перемещаются относительно друг друга.
При этом принимаемый сигнал u1(t) с выхода приемной антенны 15 поступает на первый вход смесителя 70, на второй вход которого подается первое эталонное напряжение с первого выхода блока 69 эталонных частот. Усилителем 71 первой промежуточной частоты выделяется напряжение с частотой
fпр1=fc-f1=fo+Fq-f1,
где f1 - частота опорного сигнала, участвующего в первом преобразовании частоты принимаемого сигнала.
Опорный сигнал, участвующий во втором преобразовании частоты принимаемого сигнала в смесителе 72, имеет частоту:
f2=fo-f1-Fo,
где fo - частота излучаемых колебаний;
fc - частота принимаемых колебаний.
После второго преобразования частоты принимаемого сигнала в смесителе 72 формируются колебания частоты
fизм=fпр1-f2=fo+Fq-f1-fo+Fo=Fq-Fo,
где Fq - доплеровское смещение частоты. Это колебание выделяется узкополосным фильтром 73, измеряется чостотомером 74 и поступает в вычислительный блок 81 и блок 82 регистрации.
В зависимости от того, fизм>Fo или fизм<Fo, определяется знак доплеровского смещения, а следовательно, и направление радиальной скорости перемещения транспортного средства. Для измерения угловых скоростей транспортного средства по азимуту α и углу места β напряжения uпр1(t), uпр3(t) и uпр5(t) с выходов усилителей 23, 25 и 56 первой промежуточной частоты поступают на два входа перемножителей 75 и 76. При этом узкополосные фильтры 77 и 78 выделяют гармонические колебания на частотах:
Δ Fq1=Fq3-Fq1, Δ Fq2=Fq5-Fq1,
где Δ Fq1, Δ Fq2 - разность доплеровских частот в азимутальной и угломестной плоскостях.
Указанные разности доплеровских частот измеряются частотомерами 79 и 80 соответственно, поступают в вычислительный блок 81.
В вычислительном блоке 81 определяются тангенциальные составляющие вектора скорости транспортного средства:

и модуль вектора скорости транспортного средства
которые также фиксируются блоком 82 регистрации.
Таким образом, предлагаемая система по сравнению с базовой обеспечивает определение не только угловых координит α и β , но и дальности R, радиальной скорости  и угловых скоростей по азимуту
и угловых скоростей по азимуту  и углу места
и углу места  угнанного транспортного средства. При этом по измеренным значениям дальности R и угловых скоростей
угнанного транспортного средства. При этом по измеренным значениям дальности R и угловых скоростей  и
и  определяются тангенциальные составляющие вектора скорости транспортного средства, а по измеренным значениям шести радионавигационных параметров: трех координат R, α и β и трех скоростей
определяются тангенциальные составляющие вектора скорости транспортного средства, а по измеренным значениям шести радионавигационных параметров: трех координат R, α и β и трех скоростей  ,
,  и
и  определяется модуль вектора скорости транспортного средства, т.е. наряду с местоположением определяются и параметры движения угнанного транспортного средства.
определяется модуль вектора скорости транспортного средства, т.е. наряду с местоположением определяются и параметры движения угнанного транспортного средства.
Тем самым функциональные возможности притивоугонной системы для транспортных средств расширены.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2243912C1 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2186698C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2002 |
|
RU2244341C2 |
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2378138C1 |
| АКУСТООПТИЧЕСКИЙ ПРИЕМНИК | 2006 |
|
RU2314644C1 |
| УСТРОЙСТВО ДЛЯ УЧЕТА РЕЙСОВ АВТОСАМОСВАЛОВ | 2003 |
|
RU2249252C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2209145C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2302953C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2360809C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2373082C1 |
Изобретение относится к технике для предотвращения недозволенного пользования транспортными средствами (ТС), например автомобилями. Система состоит из оборудования, устанавливаемого на ТС, и приемного пункта, размещаемого на борту летательного аппарата. Оборудование на ТС содержит источник питания, токоограничивающий резистор, дистанционной переключатель с двумя противофазными обмотками, светодиод, геркон, ключ зажигания, генератор прерывистых сигналов, электромагнитное реле, задающий генератор, фазовый манипулятор, передатчик и передающую антенну. Приемный пункт включает в себя приемные антенны, смесители, блок поиска, гетеродины, усилители первой промежуточной частоты, ключи, усилитель второй промежуточной частоты, частотный детектор, триггер, блоки регистрации, измерители ширины спектра, удвоитель частоты, блок сравнения, пороговый блок, линию задержки, обнаружитель, перемножители, узкополосные фильтры, фазовые детекторы, измерители частоты, вычислительный блок. Данная система, в которой используется многошкальная пеленгация, характеризуется расширенными функциональными возможностями за счет определения не только угловых координат, но и дальности, радикальной скорости и угловых скоростей угнанного ТС по азимуту и углу места. 4 ил.
Противоугонная система для транспортных средств, содержащая расположенные на транспортном средстве генератор прерывистых сигналов, один из питающих выводов которого через ключ зажигания соединен с плюсовой шиной источника питания, электромагнитное реле, обмотка которого подключена к выходу генератора прерывистых сигналов, а размыкающий контакт включен в цепь катушки зажигания последовательно с ключом зажигания, последовательно включенные задающий генератор, фазовый манипулятор, второй вход которого соединен с выходом генератора прерывистых сигналов, и передатчик, связанный с передающей антенной, дистанционный переключатель с двумя противофазными обмотками и размыкающими и замыкающими контактами, геркон, токоограничивающий резистор и светодиод, при этом с плюсовой шиной источника питания соединены непосредственно один из выводов токоограничивающего резистора и обмоток дистанционного переключателя, а через ключ зажигания - один из питающих выводов задающего генератора, фазового манипулятора и передатчика, размыкающий и замыкающий контакты первой обмотки дистанционного переключателя включены между одним из выводов геркона и вторыми выводами соответственно первой и второй обмоток дистанционного переключателя, второй размыкающий контакт второй обмотки дистанционного переключателя включен между вторым питающим выводом генератора прерывистых сигналов и минусовой шиной источника питания, первый размыкающий контакт второй обмотки дистанционного переключателя включен между другим выводом токоограничивающего резистора и анодом светодиода, катод которого и другой вывод геркона непосредственно, а другие питающие выводы задающего генератора, фазового манипулятора и передатчика через второй размыкающий контакт второй обмотки дистанционного переключателя соединены с минусовой шиной источника питания, и расположенные на приемном пункте измерительный канал, состоящий из последовательно включенных блока поиска, первого гетеродина, первого смесителя, второй вход которого соединен с выходом приемной антенны, усилителя первой промежуточной частоты, удвоителя частоты, второго измерителя ширины спектра, блока сравнения, второй вход которого через первый измеритель ширины спектра соединен с выходом усилителя первой промежуточной частоты, порогового блока, второй вход которого соединен с выходом линии задержки, первого ключа, второй вход которого соединен с выходом усилителя первой промежуточной частоты, второго смесителя, второй вход которого соединен с выходом второго гетеродина, усилителя второй промежуточной частоты, частотного детектора, триггера и первого блока регистрации, и из последовательно подключенных к выходу первого гетеродина второго ключа, второй вход которого соединен с выходом порогового блока, первого измерителя частоты и второго блока регистрации, при этом выход первого порогового блока дополнительно соединен с входами линии задержки и блока поиска, и четыре пеленгационных канала, каждый из которых состоит из последовательно включенных приемной антенны, смесителя, второй вход которого соединен с выходом первого гетеродина измерительного канала, усилителя первой промежуточной частоты, перемножителя, второй вход которого соединен с выходом усилителя второй промежуточной частоты измерительного канала, узкополосного фильтра, фазового детектора и блока регистрации, при этом вторые входы фазовых детекторов первого и третьего пеленгационных каналов соединены с выходом второго гетеродина, второй вход фазового детектора второго пеленгационного канала соединен с выходом узкополосного фильтра первого пеленгационного канала, второй вход фазового детектора четвертого пеленгационного канала соединен с выходом узкополосного фильтра третьего пеленгационного канала, приемный пункт размещен на борту летательного аппарата, приемные антенны размещены в виде геометрического креста, в пересечении которого помещена приемная антенна измерительного канала, общая для приемных антенн пеленгационных каналов, расположенных в азимутальной и угломестной плоскостях, отличающаяся тем, что приемный пункт системы снабжен пятым, шестым и седьмым перемножителями, пятым, шестым, седьмым и восьмым узкополосными фильтрами, пятым и шестым фазовыми детекторами, вторым, третьим и четвертым измерителями частоты, седьмым и восьмым смесителями, шестым усилителем первой промежуточной частоты, блоком эталонной частоты, вычислительным блоком и седьмым блоком регистрации, причем к выходу приемной антенны первого пеленгационного канала последовательно подключены пятый перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты второго пеленгационного канала, пятый узкополосной фильтр, пятый фазовый детектор, второй вход которого соединен с выходом первого гетеродина, шестой фазовый детектор, второй вход которого соединен с выходом фазового детектора первого пеленгационного канала, вычислительный блок, второй вход которого соединен с выходом пятого детектора, и седьмой блок регистрации, к выходу приемной антенны измерительного канала последовательно подключены седьмой смеситель, второй вход которого соединен с первым выходом блока эталонных частот, шестой усилитель первой промежуточной частоты, восьмой смеситель, второй вход которого соединен с вторым выходом блока эталонных частот, шестой узкополосной фильтр и второй измеритель частоты, выход которого соединен с вторым входом седьмого блока регистрации и третьим входом вычислительного блока, четвертый вход которого соединен с выходом первого измерителя частоты, к выходу усилителя первой промежуточной частоты второго пеленгационного канала последовательно подключены шестой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, седьмой узкополосной фильтр и третий измеритель частоты, выход которого соединен с пятым входом вычислительного блока, к выходу усилителя первой промежуточной частоты четвертого пеленгационного канала последовательно подключены седьмой перемножитель, второй вход которого соединен с выходом усилителя первой промежуточной частоты измерительного канала, восьмой узкополосной фильтр и четвертый измеритель частоты, выход которого соединен с шестым входом вычислительного блока, приемные антенны размещены на борту летательного аппарата в виде симметричного геометрического креста.
| ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2186698C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2061321C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2061320C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2042548C1 |

