Изобретение относится к области железнодорожной автоматики и может быть использовано для контроля и регистрации проследования рельсового подвижного состава в заданной точке пути.
В настоящее время для контроля и регистрации проследования железнодорожного подвижного состава в заданной точке пути применяются устройства контроля проследования осей (колес), тележек (вагонов) и поездов (отцепов, отдельных подвижных единиц).
В качестве устройств контроля проследования колес применяются рельсовые датчики прохода колес, подробно описанные в технической литературе (например, в книге Бухгольца В.П., Красовского Г.А., Штанке А.Э. “Путевые датчики контроля подвижного состава на рельсовом транспорте”, М.: Транспорт, 1976).
Рельсовый датчик прохода колес содержит, как правило, бесконтактный индуктивный чувствительный элемент и устройства крепления этого элемента к рельсу. В результате взаимодействия индуктивного чувствительного элемента с колесом изменяются электрические параметры чувствительного элемента. Изменение параметров чувствительного элемента регистрируется специальными электронными схемами и фиксируется ими как факт прохода колеса.
Длительная эксплуатация рельсовых датчиков прохода колес на железных дорогах мира выявила следующие основные недостатки.
1. Повышенную подверженность механическим разрушениям от вибраций рельсов при проходе поездов, от ударов волочащихся деталей, от рабочих органов путевых машин.
2. Пониженную точность работы при износе реборды колеса, при поперечном смещении колеса к оси пути, при “набеге” колеса на рельс.
3. Смещения датчика вдоль пути при угоне рельса.
Вследствие перечисленных недостатков устройства контроля проследования железнодорожного подвижного состава, основанные на использовании рельсовых датчиков прохода колес, не обладают достаточной точностью и надежностью.
Устройства контроля проследования тележек (вагонов) реализуются путем использования рельсовых датчиков прохода колес, при этом два рельсовых датчика устанавливаются на одном из рельсов на расстоянии, большем, чем максимально возможное расстояние между осями в тележках транспортных средств, но меньшем, чем минимальная база транспортных средств (А.с. СССР №377263. Устройство для раздельного подсчета вагонов по типам. MKИ B 61 L 1/16, опубликовано 17.04.1973).
Первый рельсовый датчик подключается к входу сложения реверсивного счетчика импульсов, а второй - к входу вычитания.
В исходном состоянии реверсивный счетчик обнулен. При проходе тележек транспортного средства над первым рельсовым датчиком реверсивный счетчик нарастающим итогом подсчитывает и запоминает число осей в тележке. При проходе этой же тележки над вторым датчиком запомненное число осей в реверсивном счетчике уменьшается на одну единицу после прохода каждого колеса. При проходе последнего колеса тележки над вторым датчиком реверсивный счетчик импульсов устанавливается в исходное состояние (обнуляется). Факт обнуления реверсивного счетчика фиксируется как факт прохода тележки (группы тележек в многоосном вагоне). По факту прохода двух тележек (двух групп тележек в многоосном вагоне) фиксируется факт прохода одного транспортного средства.
Так как устройства контроля проследования тележек (вагонов) основаны на применении рельсовых датчиков прохода колес, они имеют все ранее отмеченные недостатки, присущие рельсовым датчикам. Дополнительно появляется новый недостаток, заключающийся в ошибке определения прохода тележек при проследовании транспортного средства, у которого база меньше расстояния между рельсовыми датчиками.
В качестве средства контроля проследования поездов (отцепов, отдельных транспортных средств) в последние годы стал применяться индуктивно-проводной датчик (Карюкин С.Е. Индуктивный проводной датчик. “Автоматика, связь, информатика”. 1998, №8, с.10-12).
Индуктивно-проводной датчик состоит из индуктивного шлейфа, размещенного на пути, и электронного блока, размещенного в трансформаторном ящике вблизи пути.
Электронный блок содержит автогенератор гармонических колебаний, в колебательную систему которого включен индуктивный шлейф, и схемы обработки сигналов.
Наличие транспортного средства над индуктивным шлейфом определяется фактом превышения величиной изменения амплитуды или частоты автогенератора, установленной заранее пороговой величины, причем эта пороговая величина устанавливается из условия надежного контроля базы длиннобазных вагонов.
Индуктивно-проводной датчик не имеет недостатков, присущих рельсовым датчикам.
Авторы изобретения исследовали возможность его применения не только для контроля прохода транспортных средств, но и для контроля прохода тележек и колес транспортных средств.
Но эксплуатационные испытания показали, что для контроля проследования колес и тележек необходимо резко уменьшить размеры индуктивного шлейфа, что приводит к резкому уменьшению чувствительности датчика и к резкому снижению точности его работы. Перед авторами изобретения встала задача резкого повышения чувствительности и точности индуктивного проводного датчика.
Было установлено, что существуют устройства, в которых используется метод переходных процессов. Так, известно устройство для геодезической разведки (А.с. СССР №1239672, МКИ G 01 V 3/10, опубликовано 23.06.86), содержащее антенну, выполненную в виде изолированной двухпроводной линии, соединенный с антенной генератор импульсов тока, подсоединенный к антенне усилитель отраженного сигнала, средства обработки отраженного сигнала, средства распознавания сигнала геодезической аномалии.
Генератор импульсов генерирует мощный импульс постоянного тока, который поступает в антенну. Антенна преобразует импульс постоянного тока в импульс магнитного поля, который распространяется в окружающем пространстве. При окончании действия импульса, в паузе между импульсами, усилитель принимает отраженный от геодезической аномалии сигнал, усиливает его и подает в схемы распознавания геодезической аномалии.
Известен импульсный вихретоковый металлоискатель (А.с. СССР №949600, МКИ G 01 V 3/11, опубликовано 07.08.1982), содержащий вихретоковый преобразователь (аналог антенны вышеописанного устройства для геодезической разведки), соединенный с ним генератор импульсов, подключенный к вихретоковому преобразователю усилитель, имеющий средства фильтрации полезного сигнала от помех, блок индикации наличия в зоне действия вихретокового преобразователя металлического предмета.
Вихретоковый преобразователь питается мощными зондирующими импульсами тока от импульсного генератора. В паузах между импульсами сигнал - отклик от металлического предмета с вихретокового преобразователя (антенны) поступает на вход усилителя, с выхода которого сигнал поступает в схему фильтрации помех, после чего подается в блок индикации и вызывает срабатывание индикаторных приборов.
Важным преимуществом устройств, основанных на использовании метода переходных процессов, является то, что сигнал - ответ на выходе усилителя появляется только при наличии в зоне действия антенны контролируемого объекта, и этот сигнал равен нулю, если нет контролируемого объекта.
Другим важным преимуществом является возможность генерировать мощный импульс магнитного поля, что позволяет существенно повысить чувствительность устройств. Причем при большой мощности импульсов и одновременно при большой их скважности средняя потребляемая мощность электрической энергии может быть незначительной.
Технические решения, примененные в устройствах, основанных на использовании метода переходных процессов, совпадают с существенными признаками изобретения.
Однако прототипом изобретения является описанный выше индуктивно-проводной датчик, являющийся средством того же назначения и характеризующийся совокупностью признаков, сходной с совокупностью существенных признаков изобретения (Карюкин С.Е. Индуктивно-проводной датчик “Автоматика, связь, информатика". 1998, №8, с.10-12).
Существенным недостатком прототипа, как вообще всех автогенераторных систем контроля, является сильная зависимость полезных сигналов от изменения характеристик окружающей среды. Это обусловлено тем, что полезный сигнал является приращением сигнала автогенератора, и, как правило, составляет несколько процентов или даже долей процента от сигнала автогенератора, что делает его уязвимым от незначительных изменений сигнала автогенератора, вызванных изменением напряжения питания, температуры окружающего воздуха, влажности, старения элементов и т.п.
Для устранения этого недостатка автогенератора в прототипе применено устройство автоподстройки. Принцип действия узла автоподстройки основан на том, что в цепь отрицательной обратной связи автогенератора введено регулирующее звено, которое изменяет глубину связи, поддерживая стабильную амплитуду автогенератора на заданном уровне, что, по утверждению автора, позволяет компенсировать влияние климатических факторов и иметь гарантированную зону срабатывания датчика.
Общеизвестно, что автоподстройка автогенератора может приводить к ошибкам датчика.
Так при длительной остановке или стоянке транспортного средства в зоне действия индуктивного шлейфа изменение внешних условий может привести к повышению напряжения колебаний автогенератора и значит к ложной свободности контролируемого участка.
С другой стороны, вследствие конечной величины постоянной времени звена автоподстройки при низкой скорости подвижных единиц возможна ложная подстройка автогенератора, вследствие чего возможен пропуск контролируемого объекта.
Заявленное устройство контроля проследования железнодорожного подвижного состава основано на использовании метода переходных процессов, не содержит звена автоподстройки и не имеет недостатков прототипа.
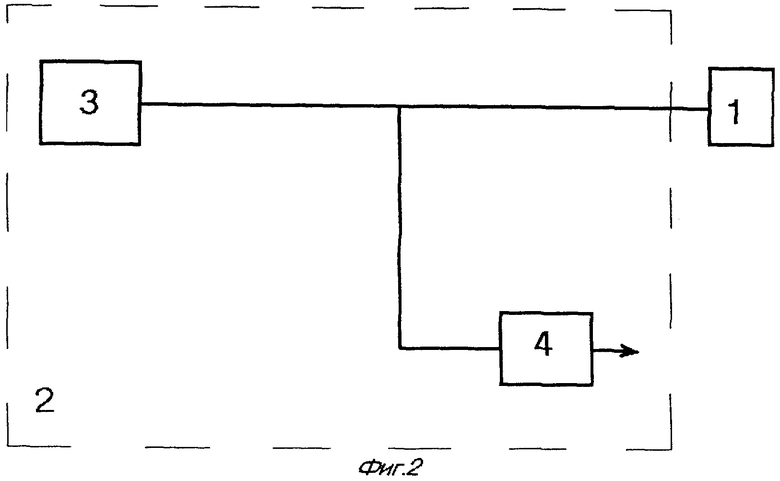
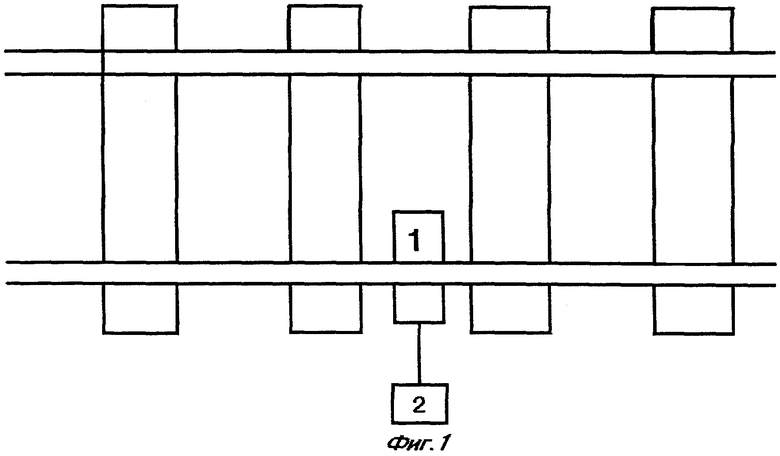
Заявленное устройство содержит размещенный на железнодорожном пути, в шпальном ящике, индуктивный шлейф и подключенный к нему электронный блок, для воздействия индуктивного шлейфа с металлическими массами транспортных средств используется метод переходных процессов, для чего в качестве источника питания индуктивного шлейфа применен генератор импульсов постоянного тока, в качестве узла обработки сигналов применен приемник-анализатор отраженных сигналов. Выход генератора импульсов постоянного тока подключен к индуктивному шлейфу; индуктивный шлейф подсоединен к входу приемника-анализатора отраженных сигналов, который может содержать выходы сигналов прохода колесных пар, тележек и поездов (отцепов, отдельных транспортных средств).
Генератор импульсов непрерывно генерирует импульсы постоянного тока. Эти импульсы поступают в индуктивный шлейф, в результате чего последний генерирует в окружающее пространство импульсы постоянного магнитного поля. При отсутствии в окрестностях индуктивного шлейфа транспортных средств импульсы магнитного поля уходят в окружающее пространство, и в паузах между импульсами на вход приемника-анализатора сигналы не поступают или поступают постоянные по величине отраженные сигналы от проводящих предметов окружающего фона (в основном от рельсов).
При появлении в окрестностях индуктивного шлейфа транспортного средства импульсы постоянного магнитного поля будут проникать в металлические предметы (колесные пары, тележки, днища транспортных средств и др.), в результате чего в паузах между импульсами эти предметы будут излучать уменьшающееся во времени магнитное поле, которое вызовет появление импульсов напряжения на индуктивном шлейфе и входе приемника-анализатора отраженных сигналов. Самые большие по амплитуде отраженные сигналы поступают от колесных пар, от тележек сигналы будут меньше, от днищ транспортных средств - еще меньше. Приемник-анализатор отраженных сигналов различает сигналы от колес, тележек и поездов (отцепов или отдельных транспортных средств) и может распределять эти сигналы по отдельным выходам.
Заявленное устройство представлено на чертежах (фиг.1; фиг.2). Прототипом заявленного устройства служит индуктивно-проводной датчик (Карюкин С.Е. “Индуктивно-проводной датчик”. “Автоматика, связь, информатика”, №8, 1998, с.10-12).
Как и в прототипе, заявленное устройство содержит размещенный на железнодорожном пути индуктивный шлейф 1 и подключенный к нему электронный блок 2.
Как и в прототипе, электронный блок 2 содержит генератор - источник питания индуктивного шлейфа, но только вместо генератора гармонических колебаний применен генератор импульсов постоянного тока 3, позволяющий реализовать метод переходных процессов. Схемы обработки непрерывных гармонических сигналов заменены приемником -анализатором отраженных сигналов 4.
Выход генератора импульсов постоянного тока 3 связан с индуктивным шлейфом 1, индуктивный шлейф 1 подключен к входу приемника-анализатора отраженных сигналов 4, который может содержать выходы сигналов прохода колесных пар, тележек и подвижных единиц.
Устройство работает следующим образом. Генератор импульсов 3 непрерывно вырабатывает импульсы постоянного тока. Эти импульсы поступают к индуктивному шлейфу 1.
В результате протекания по шлейфу 1 импульсов постоянного тока шлейф 1 излучает в окружающее пространство импульсы постоянного магнитного поля.
При отсутствии в окрестностях шлейфа 1 транспортного средства на вход приемника-анализатора 4 отраженные сигналы не поступают или поступают отраженные постоянные по величине сигналы от металлических предметов окружающего фона (в основном от рельсов).
При появлении в окрестностях шлейфа 1 транспортного средства импульсы постоянного магнитного поля будут проникать в металлические детали транспортного средства (колесные пары, тележки, днища транспортных средств и др.), в результате чего в паузах между импульсами эти детали будут излучать в окружающее пространство уменьшающееся во времени магнитное поле, которое вызывает появление импульсов напряжения на индуктивном шлейфе 1 и на входе приемника-анализатора отраженных сигналов 4. Приемник-анализатор 4 различает сигналы от колес, тележек, транспортных средств и может распределять их по соответствующим выходам.
Таким образом, рассмотренные выше известные признаки известных устройств позволили создать неизвестное их сочетание, которое существенно повышает точность и надежность устройств контроля проследования железнодорожного подвижного состава в заданной точке пути, основанных на контроле проследования колес, тележек и подвижных единиц.
Основной технический результат, заключающийся в повышении точности и надежности заявленного устройства, достигается за счет следующих преимуществ.
1. Применение метода переходных процессов позволяет иметь на выходе приемника-анализатора отраженных сигналов независимую от внешних условий стабильную во времени форму и амплитуду сигналов от колес, тележек и днищ транспортных средств, с отсчетом сигналов от начального нулевого уровня, что существенно облегчает задачу различения сигналов.
2. Возможность реализации мощных импульсов питающего индуктивный шлейф постоянного тока позволяет существенно повысить помехозащищенность заявленного устройства, причем мощные импульсы тока можно получить при незначительной средней мощности тока благодаря возможности реализации большой скважности импульсов.
3. Благодаря отсутствию колебательной системы (отсутствие автогенератора синусоидальных сигналов) емкость и активное сопротивление кабеля между индуктивным шлейфом и электронным блоком не оказывает существенного влияния на работу заявленного устройства, что позволяет применять кабель значительной длины и значительно удалять электронный блок от места размещения индуктивного шлейфа (до нескольких сотен метров).
4. Размещение индуктивного шлейфа на пути существенно понижает отрицательное воздействие на его долговечность вибраций и ударов, возникающих при проходе поездов, устраняет зависимость работы устройства от износа колес, поперечного смещения колесных пар, угона рельса.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| РАЗВЕТВЛЕННАЯ КАБЕЛЬНАЯ ПЕТЛЕВАЯ РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ ОГРАЖДЕНИЯ БЛОК-УЧАСТКОВ РАЗВЕТВЛЕННЫХ РЕЛЬСОВЫХ ПУТЕЙ В СИСТЕМАХ ЦЕНТРАЛИЗАЦИИ И АВТОБЛОКИРОВКИ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2007 |
|
RU2340498C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОСЛЕДОВАНИЯ ОТЦЕПА | 2005 |
|
RU2337032C2 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА АВАРИЙНО ГРЕЮЩИМИСЯ РОЛИКОВЫМИ БУКСОВЫМИ УЗЛАМИ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2007 |
|
RU2337029C1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ СВОБОДНОСТИ ОТ ПОДВИЖНОГО СОСТАВА УЧАСТКОВ ПУТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕГОНЕ | 2010 |
|
RU2438905C1 |
| Система контроля целостности состава | 2015 |
|
RU2614158C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ОТМЕТКИ ПРОХОДА КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1995 |
|
RU2107637C1 |
| Система для интервального регулирования движения поездов | 2022 |
|
RU2791776C1 |
| Система для интервального регулирования движения поездов | 2022 |
|
RU2791777C1 |
| Устройство для контроля проследования железнодорожного подвижного состава | 1985 |
|
SU1444213A1 |
Изобретение относится к железнодорожной автоматике и может быть использовано для контроля и регистрации проследования колесных пар, тележек и транспортных средств в заданной точку пути. Устройство содержит расположенный на пути индуктивный шлейф и подключенный к нему электронный блок, который включает генератор импульсов постоянного тока и приемник-анализатор отраженных сигналов, различающий в паузах между импульсами сигналы колес, тележек и подвижных единиц. Выход генератора импульсов постоянного тока подключен к индуктивному шлейфу, который подключен к входу приемника-анализатора отраженных сигналов. Изобретение направлено на повышение точности и надежности контроля проследования и регистрации колесных пар, тележек и поездов. 2 ил.
Устройство контроля проследования железнодорожного подвижного состава, содержащее размещенный на пути индуктивный шлейф и подключенный к нему электронный блок, отличающееся тем, что электронный блок содержит генератор импульсов постоянного тока и приемник-анализатор отраженных сигналов, различающий в паузах между импульсами сигналы колес, тележек и подвижных единиц, причем выход генератора импульсов постоянного тока подсоединен к индуктивному шлейфу, который подключен к входу приемника - анализатора отраженных сигналов.
| КАРЮКИН С.Е., Индуктивный проводной датчик, Автоматика, связь, информатика, 1998, №8, с.10-12 | |||
| Устройство для геофизической электроразведки | 1984 |
|
SU1239672A1 |
| 0 |
|
SU155866A1 | |
| Силовая установка | 1979 |
|
SU885583A1 |
| Устройство для геоэлектроразведки | 1978 |
|
SU851305A1 |
| ИНДУКТИВНО-ПРОВОДНОЙ ДАТЧИК ДЛЯ ОБНАРУЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ГРАНИЦАХ ОПРЕДЕЛЕННОГО УЧАСТКА ПУТИ | 1997 |
|
RU2123953C1 |
| US 4675658 A, 23.06.1987. | |||

