Изобретение относится к космической технике, а именно к средствам перемещения космонавта в условиях малой гравитации.
Известны устройства для перемещения по поверхности планет, описанные в патентах RU 2083420 C1, 07.10.1997 и RU 2059467 C1, 05.10.1996. Эти устройства касаются автоматических космических аппаратов (планетоходов) и не предназначены непосредственно для космонавтов. Известно также устройство для перемещений астронавтов по лунной поверхности в виде самоходной колесной тележки, которую использовали астронавты при высадке на Луну.
Известно индивидуальное устройство для перемещений космонавта по лунной поверхности, содержащее корпус, поршень, выдвижной шток с опорой, двигательную установку для осуществления циклов выдвижения и уборки штока, систему управления. Данное устройство реализует перемещения космонавта в виде серии прыжков под различными углами к горизонту – см. Aviation Week & Space Technology N 9, 1983. R.J.MEETIN, H.S. SEIFERT, Propulsion Dynamics of Lunar Hoppers. J. Spacecraft & Rockets, vol.11, No 12. December 1974, pp. 852 - 856. Однако данное устройство достаточно сложное и громоздкое, требует расхода рабочего тела.
Ближайшим аналогом предлагаемого устройства является устройство для перемещений космонавта, например, по лунной поверхности по патенту RU 2152337 С1, 10.07.2000. Это устройство содержит закрепленные в полых корпусах, прикрепляемых к ботинкам космонавта, два идентичных механизма, каждый из которых имеет силовую пружину, размещенную между днищем стакана и поршнем, на выдвижном штоке которого закреплена площадка с устройством для ее крепления к ботинку космонавта, подпружиненные собачки, эластичные тяги, снабженные кольцами для сжатия силовых пружин, причем одни концы эластичных тяг закреплены на корпусах устройства, а другие - с растягивающимися вставками - закреплены на жесткой части скафандра, причем каждый корпус имеет форму полуцилиндра с закругленными передним и задним краями, дугообразные опорные части поверхностей корпусов имеют покрытие из эластичного материала с грунтозацепами, при этом боковая стенка одного из корпусов имеет ниши, а боковая стенка другого корпуса имеет выступающие магнитные диски-защелки, взаимодействующие с нишами первого корпуса, две опорные палки, рукоятки которых снабжены крюками захвата колец, а концы палок снабжены опорными кольцами и втулками из тяжелого металла.
Недостатком прототипа является то, что спусковой механизм сложен. Чтобы привести спусковой механизм в действие, нужно нажатие одновременно двух палок. Для полета космонавта под нужным углом к горизонтальной плоскости ему нужно придать требуемый наклон своему корпусу, что требует умения и предварительной натренированности.
Задачей изобретения является упростить конструкцию устройства и пользование им.
Технический результат изобретения заключается в том, что упрощена конструкция механизмов спуска пружин и тем самым повышена надежность устройства, снижена его масса. Этим, в свою очередь, упрощены предстартовые действия космонавта для обеспечения его полета под нужным углом к горизонтальной плоскости, а также снижено время на обучение космонавта, упрощены операции одновременного высвобождения силовых пружин.
Поставленная задача решается тем, что в известном устройстве передние половины указанных опорных частей поверхностей корпусов имеют плоские опорные площадки, закрепленные на щечках указанных корпусов, при этом выдвижные штоки имеют ряд сквозных отверстий, расположенных по вертикалям штоков, а на стенках указанных стаканов закреплены подпружиненные кривые рычаги, причем указанные собачки выполнены на одних концах рычагов и через отверстия в стаканах взаимодействуют с отверстиями на штоках, а другие концы кривых рычагов связаны с тросиками, верхние концы которых закреплены на спусковой скобе, подвижно закрепленной на жесткой части скафандра.
При этом указанные корпуса могут быть снабжены съемными боковыми (например, стальными) дугообразными пластинами или пластинами с зубьями.
Сущность изобретения поясняется нижеприводимыми чертежами.
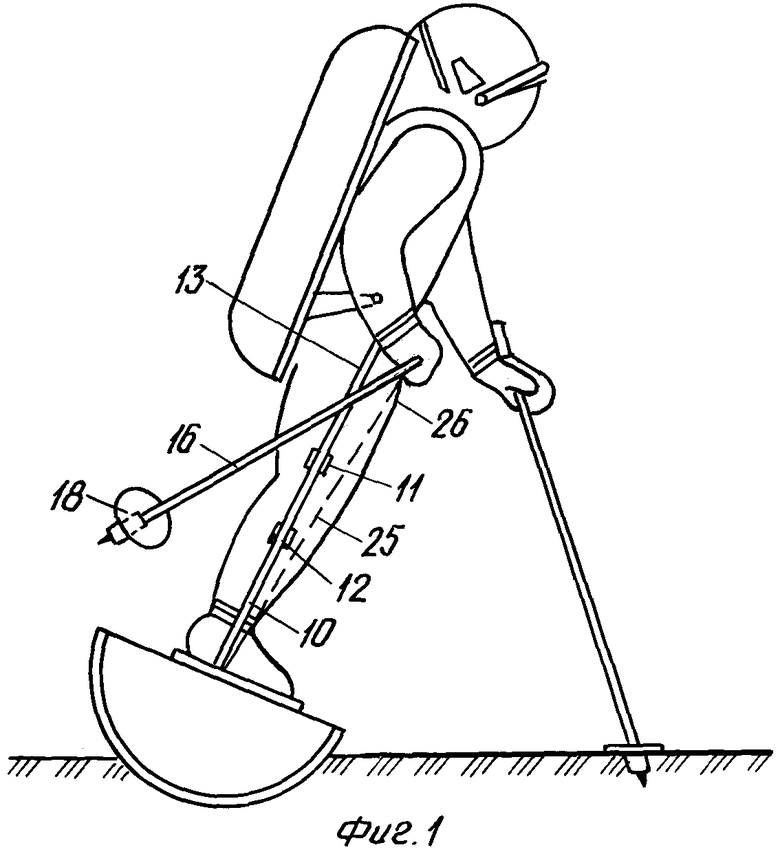
На фиг.1 дан вид космонавта с устройством в стартовом положении.
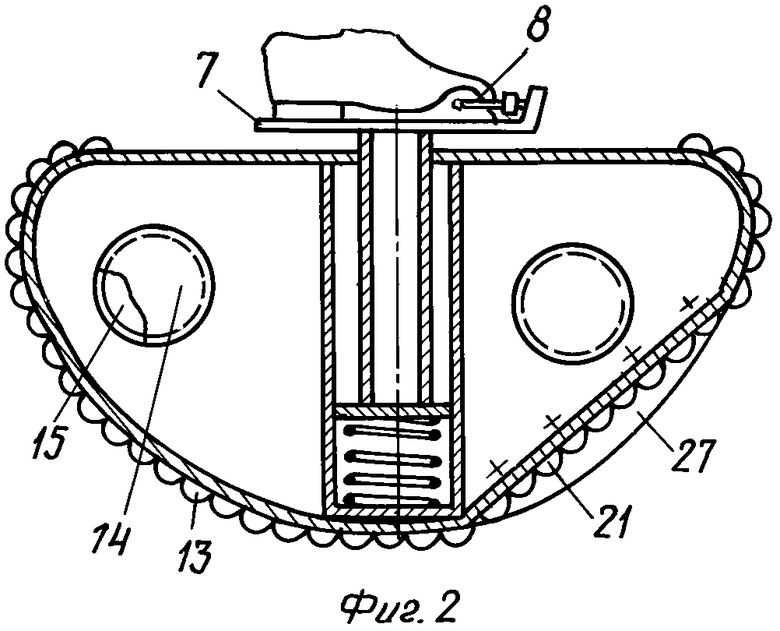
На фиг.2 дана схема корпуса в продольном разрезе.
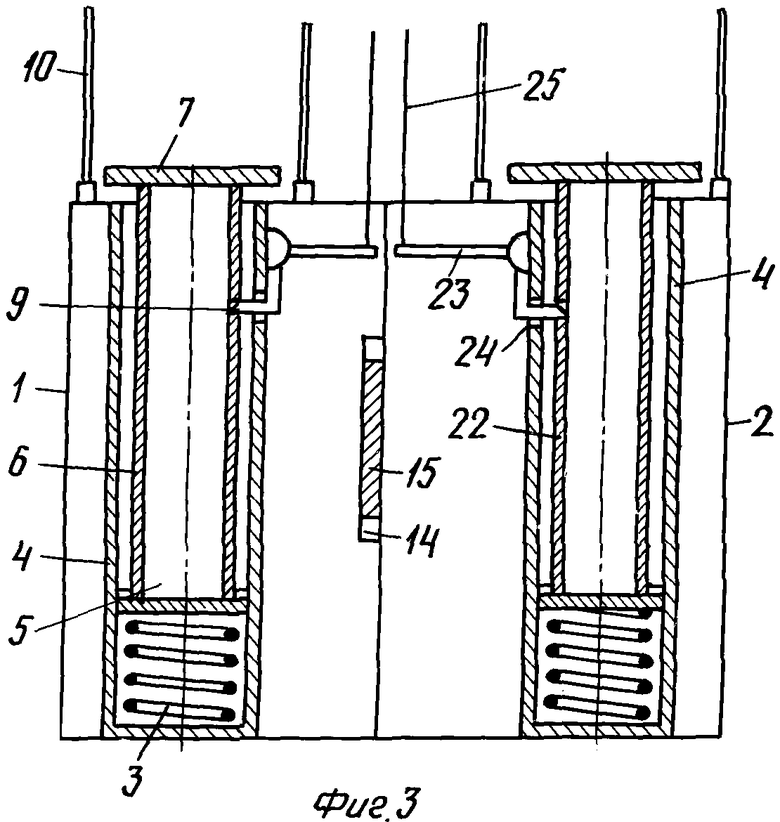
На фиг.3 дан вид устройства в поперечном разрезе.
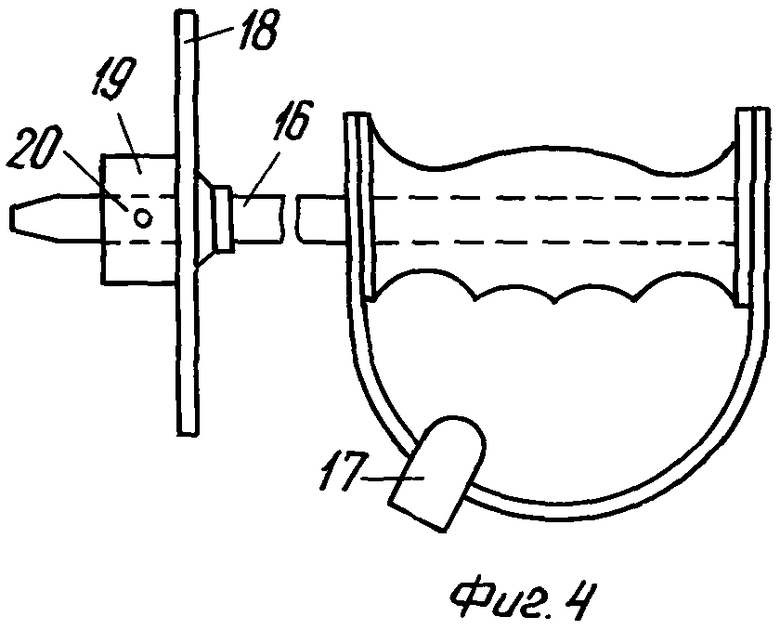
На фиг.4 представлен пример выполнения опорных палок космонавта.
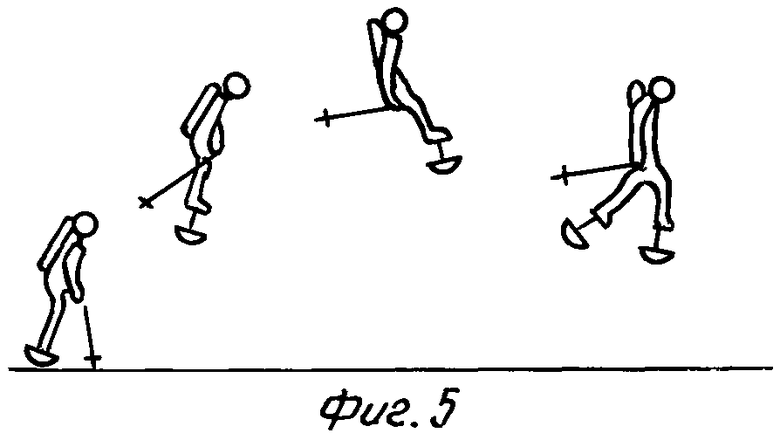
На фиг.5 показан вид траектории наклонного прыжка космонавта.
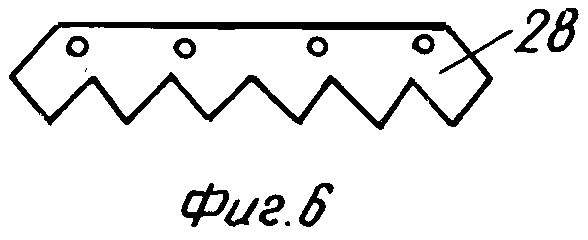
На фиг.6 дан вид съемной стальной пластины с зубьями.
Устройство для перемещений космонавта, например, по лунной поверхности содержит два идентичных механизма, закрепленных в полых корпусах 1, 2, каждый из которых прикрепляется к ботинкам космонавта. Каждый механизм имеет силовую пружину 3, размещенную между днищем закрепленного в корпусе стакана 4 и поршнем 5, на подвижном штоке 6 которого закреплена площадка 7 с устройством 8 для ее крепления к ботинку космонавта.
В корпусах 1, 2 имеются подпружиненные собачки 9, удерживающие пружины 3 в сжатом состоянии, эластичные тяги 10, снабженные кольцами 11, 12 для их захвата при сжатии силовых пружин, причем одни концы эластичных тяг закреплены на корпусах 1, 2, а другие концы, снабженные растягивающимися вставками, закреплены на жесткой части скафандра космонавта.
Корпуса 1, 2 имеют форму полуцилиндров с закругленными передними и задними краями, при этом опорная часть поверхностей корпусов имеет покрытие из эластичного материала с грунтозацепами 13. Боковая стенка одного из корпусов имеет ниши 14, а боковая стенка другого корпуса имеет выступающие магнитные диски-защелки 15, взаимодействующие с нишами первого корпуса.
Устройство имеет две опорные палки 16, рукояти которых снабжены крюками 17 сцепления с кольцами 11, 12, а нижние концы палок имеют опорные кольца 18 и втулки 19 из тяжелого металла с крепежными винтами 20 для их крепления на концах палок.
Передние половины дугообразных опорных поверхностей корпусов имеют плоские опорные площадки 21, закрепленные на щечках корпусов 1, 2. Выдвижные штоки 6 имеют ряд сквозных отверстий 22, расположенных по вертикалям штоков, а на стенках стаканов закреплены подпружиненные кривые рычаги 23 (пружины не показаны). Одни концы рычагов имеют собачки 9, которые, проходя через отверстия 24 в стаканах 4, взаимодействуют с отверстиями 22 на штоках 6, а другие концы связаны с тросиками 25, верхние концы которых закреплены на спусковой скобе 26, подвижно закрепленной на жесткой части скафандра.
На боковых сторонах корпусов имеются отверстия для возможности крепления съемных боковых дугообразных пластин 27 или пластин 28 со стальными зубьями.
Устройство используется следующим образом. Предварительно космонавт проходит ряд обучающих тренировок, например, в песчаном карьере, где приобретает навык наклонных стартов как с мягкой поверхности, так и с жесткой.
Плоские опорные площадки 21 облегчают космонавту принять нужное наклонное положение тела для прыжка под нужным углом к горизонтальной плоскости, при этом космонавт одной палкой опирается на грунт, а крюком 17 второй палки дергает вверх спусковую скобу 26, которая через тросики 25 и кривые рычаги 23 и освобождает обе силовые пружины 3.
Силовые пружины могут быть предварительно сжаты на различную величину. На фиг.2, 3 показано, что пружины сжаты максимально. При этом после спуска они дают максимальный толкающий импульс, например, для выполнения вертикального обзорного прыжка. Сжатие пружин до конца космонавт выполняет в два приема. Сначала сжимает их более половины, взявшись крюками 17 обеих палок за верхние кольца 11, и собачками 23 фиксирует их полусжатыми. Затем, зацепившись обеими крюками 17 за кольца 12 одной ноги, космонавт сжимает одну силовую пружину полностью, а затем таким же образом сжимает полностью и другую.
Космонавт может приземляться одновременно на две ноги и, оттолкнувшись ими, продолжать прыжки. Он может приземляться и на одну ногу, чтобы затем перемещаться, отталкиваясь поочередно обеими ногами.
Крепящиеся винтами боковые пластины 27 предохраняют устройство от соскальзывания юзом при движении космонавта поперек склона. Пластины 27 или пластины 28 со стальными зубьями могут быть полезны при движении по скалистым поверхностям, когда после приземления “на пятки” на скалистой поверхности эластичные грунтозацепы держат плохо. При движении по толстому слою пыли или песка дугообразные или зубчатые пластины практически не помогают и могут быть сняты.
Несильно намагниченные магнитные диски - защелки 15 помогают держать ноги вместе или небольшим усилием рассоединять корпуса 1, 2. Крепления 8 позволяют быстро снять предлагаемое устройство с ботинок, чтобы перемещаться пешком.
Изобретение относится к космической технике, а именно к средствам перемещений космонавта в условиях малой гравитации. Предлагаемое устройство имеет два идентичных механизма, закрепленных в полых корпусах 1, 2, каждый из которых прикрепляется к ботинкам космонавта. Каждый механизм имеет силовую пружину 3, размещенную между днищем стакана 4 и поршнем 5. На подвижном штоке 6 поршня закреплена площадка 7 с креплением к ботинку космонавта. Подпружиненные собачки 9 фиксируют положение взведенных силовых пружин 3. Эти собачки закреплены на кривых подпружиненных рычагах 23, связанных тросиками 25 со спусковой скобой на жесткой части скафандра. Передние половины опорных поверхностей корпусов 1, 2 имеют плоские опорные площадки, скрепленные с щечками этих корпусов, что облегчает космонавту занятие нужного положения перед выполнением первого наклонного прыжка. Устройство может иметь съемные, например, стальные выступающие боковые пластины или пластины с зубьями – для облегчения движения по скалистым поверхностям. Технический результат изобретения состоит в упрощении конструкции механизмов, обеспечивающих спуск пружин, и повышении этим надежности устройства, а также в снижении его массы и облегчении пользования им. 1 з.п. ф-лы, 6 ил.
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЙ КОСМОНАВТА, НАПРИМЕР, ПО ЛУННОЙ ПОВЕРХНОСТИ | 1999 |
|
RU2152337C1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| R.J.MEETIN, H.S | |||
| SEIFERT, Propulsion Dynamics of Lunar Hoppers | |||
| J | |||
| Spacecraft & Rockets, vol.11, No 12 | |||
| Dec., 1974, pp | |||
| Дноуглубительная машина | 1924 |
|
SU852A1 |
| ПЛАНЕТОХОД | 1993 |
|
RU2083420C1 |
| RU 2059467 C1, 05.10.1996. | |||

