Группа изобретений относится к космической технике, а именно инженерным машинам, предназначенных для эксплуатации в природных условиях Луны и других небесных тел, имеющих твердую поверхность.
Активно декларируемый в научной печати и СМИ тренд в развитии мировой космической деятельности - это Луна, ее исследование, освоение, научная и хозяйственная эксплуатация в качестве седьмого континента планеты Земля. Для достижения этой цели человечеству необходимо научиться жить и работать на Луне.
Обустройство доставленных с Земли или сооружаемых на Луне обитаемых объектов станет перспективной и неизбежной задачей при развертывании лунной базовой станции.
Процессу строительства предшествуют работы по подготовке строительной площадки и нулевого цикла. В условиях горнотехнической обстановки на Луне, при планировании строительной площадки потребуется удаление в отвал крупных камней, отсыпку или срезку элементов микрорельефа, кратерных валов, закладку траншей и котлованов, обваловку и грунтозащиту объектов.
Для разработки грунтов на Луне будут создаваться технологии и инженерные машины, адекватные строительным задачам и природным условиям Луны. Вместе с тем, анализируется практика землеустройства и опыт эксплуатации инженерных машин на Земле, а также проекты-предшественники в качестве критериев для выбора облика инженерных машин для гипогравитационного пространства.
Известна лунная инженерная машина, содержащая четырехколесное специальное силовое шасси, на котором размещается герметизированная, теплоизолированная кабина с люком-лазом, иллюминаторами обзора, прожекторами и телекамерами, с пультом управления, блоками отдельных систем (жизнеобеспечения, дистанционного управления), рассчитанная на работу в ней одного космонавта-оператора без скафандра, при этом включающая в себя комплекс навесного оборудования: бульдозерный отвал, подъемный кран, бур, манипулятор и др. с электромеханическими приводами, с энергопитанием от специального двигателя внутреннего сгорания, работающего на компонентах ракетного топлива. (http://gagarin.energia.ru/past-future/267-iz-arkhiva-sozdanie-zaryvayushchejsya-lunn). Прототип.
Способ использования известной лунной инженерной машины заключается в том, что машину размещают в гараже жилого отсека лунной станции, космонавт из мастерской через люк-лаз переходит в кабину машины, выезжает из гаража через откидываемую дверь, которая служит одновременно трапом (пандус), после выполнения работ вводят машину по трапу в гараж, закрывают трап-дверь, через люк-лаз оператор переходит в мастерскую. (http://gagarin.energia.ru/past-future/267-iz-arkhiva-sozdanie-zaryvayushchejsya-lunn). Прототип.
Рассмотрим основные факторы, формирующие устройство инженерной машины.
Для упомянутых выше видов грунторазработки существует и эксплуатируется парк разноцелевых инженерных подвижных машин, оснащенных специальными агрегатами: бульдозер, скрепер, грейдер, экскаватор и др.
Представляется целесообразным использовать принцип базового тягача с комплектом сменного оборудования, о чем пишут и что предлагают специалисты общего профиля.
Однако работа по перемонтажу на тягаче агрегатов и рабочих органов в лунных условиях оценивается как трудновыполнимая: пока не приходится рассчитывать на то, что на ранних этапах освоения Луны эта работа будет выполняться в гермоизолированном ангаре, с нормальной атмосферой и температурой, опытным механиком в спецовке, а не космонавтом в наддутом скафандре.
Поэтому следует стремиться к созданию моноблочной многофункциональной инженерной машины, в исходной своей конфигурации способной обеспечивать выполнение всех операций в потоке заданного техпроцесса, т.е. машины с встроенными агрегатами грунторазработки.
Тип движителя является одним из характерных признаков землеройно-транспортных машин. Широко распространены гусеничные и колесные движители. Менее известны шагающие, колесно-шагающие, прыгающие и др. (http://epizodyspace.ru/bibl/ziv/1991/5/planetoh.html). Движитель инженерной машины должен обладать опорный проходимостью и устойчивостью, профильной проходимостью, высокими сцепными свойствами с различными грунтами, надежностью и ремонтопригодностью.
Гусеничное ходовое оборудование обеспечивает более равномерное распределение давления на грунт, хорошую устойчивость при работе, высокую проходимость и сцепление с грунтом, большое тяговое усилие.
Недостатки гусеничного хода: малые транспортные скорости, сложность конструкции, большая масса ходового оборудования (30…40% массы машины), значительный износ звеньев гусеницы.
Колесное ходовое оборудование обеспечивает маневренность и мобильность, высокую транспортную и рабочую скорости, мягкость хода, сравнительно более простую конструкцию, высокую износостойкость, транспортирование грунта на большие расстояния (меньшую утомляемость оператора при непосредственном управлении).
Недостатки колесных машин: относительное большое удельное давление на грунт, меньший, чем у гусеничных машин коэффициент сцепления с грунтом (возможна пробуксовка колес на участках подъема).
Многоосность при полноприводности колес является эффективным средством обеспечения вездеходности (проходимости) транспортных средств благодаря снижению нагрузки на ось (колесо) и рассредоточению полной массы транспортного средства по многим колесам на большой опорной площади. Отечественный «Луноход-1» был оснащен восемью мотор-колесами с независимой подвеской каждого. Легкий металлический каркас колес был обтянут по рабочей поверхности металлической сеткой с грунтозацепами. Такое решение ходовой части оказалось рациональным и достаточным для легкого исследовательского аппарата. (И.И. Черкасов, В.В. Швырев. Грунтоведение Луны. Издательство "Наука". Москва. 1979. С. 85, 86).
Однако, анализ данных о движении «Лунохода-1» показал, что коэффициент проскальзывания колес на горизонтальных участках трассы достигал 15%, на склонах кратеров этот коэффициент увеличивался до 20-30%, а удельно свободная тяга изменялась от 20 до 41% собственного веса аппарата на Луне (И.И. Черкасов, В.В. Швырев. Грунтоведение Луны. Издательство "Наука". Москва. 1979. С. 88), что неприемлемо для инженерной машины.
Ключевой вопрос, на который необходим ответ и принятие соответствующего решения при создании инженерной луномашины: оснащать ли луномашину герметичной кабиной для экипажа или доверить непосредственное и дистанционное управление при движении и реализации ее технологического предназначения космонавту, снаряженному в скафандр?
Отличительные свойства гермокабины: комфортные условия для экипажа и умеренные энерготраты; продолжительность рабочей смены может превышать временные ресурсы эксплуатации скафандра без подзарядки; достаточный обзор обрабатываемого участка поверхности; наличие системы стыковки и внутреннего перехода облегчает сообщение с базовым модулем.
Гермокабина должна содержать систему жизнеобеспечения, а также, на случай отказа ходовой части, шлюзовой отсек, систему шлюзования, герметичный выходной люк и скафандры - для возможности возвращения к базовому модулю пешим переходом. При сбоях, неисправности системы шлюзования, спасение экипажа может быть обеспечено только наличием в составе базовой станции мобильного аппарата-спасателя со стыковочным агрегатом. При отсутствии такового ситуация расценивается как катастрофическая.
Инженерная луномашина, не содержащая гермокабину и сопутствующих систем и агрегатов, характеризуется более высоким уровнем безотказности и надежности.
Учитывая опыт внекорабельной деятельности экипажа на орбитальных станциях, можно заключить, что инженерная луномашина, не содержащая гермокабины, управляемая космонавтом в скафандре, является рациональным вариантом комплектации для начального периода освоения Луны (О.С. Цыганков. Концепция трудовой деятельности в гипогравитационном пространстве Луны. Воздушно-космическая сфера. №4 (105) 2020 г.).
Оператор в скафандре, находясь на посту управления, получает максимально возможный визуальный контакт с окружающим ландшафтом. Член экипажа может, без промежуточных процедур (например, шлюзования), перейти на грунт, осмотреть фронт работы, оценить состояние грунта, корректировать управляющие действия оператора луномашины. Данный грунторазделочный комплекс содержит автономный пульт для дистанционного управления, который можно задействовать, находясь вблизи разрабатываемого участка поверхности. Исключается необходимость стыковаться с базовым модулем, который может быть заглублен и обвалован реголитом. При отказе ходовой части без потери времени можно начинать пеший переход космонавтов к базовому модулю.
Размещение членов экипажа на платформе инженерной машины в процессах перемещения, циклического функционирования рабочих органов, на неровностях поверхности с песчано-пылевым слоем, покрывающим скально-обломочные россыпи и валунные включения, сопряжено с воздействием на членов экипажа разнонаправленных и разновеликих нагрузок. Безопасность экипажа мобильных технических средств обеспечивается известными средствами: ремни безопасности в автомобиле, привязные системы в авиации, системы фиксации в космической технике.
Известен Rover (Lunar Roving vechicle), оснащенный креслами для астронавтов в мягких скафандрах с мягкой оболочкой, с сидениями и спинками из нейлона и полосами клейкого материала на спинке для фиксации ранца жизнеобеспечения, и привязными ремнями из ребристого нейлона (Космонавтика. Главный редактор В.П. Глушко. Москва. Издательство «Советская энциклопедия. 1985. С. 227).
Ожидаемо, что оператор инженерной луномашины будет облачен в отечественный полужесткий скафандр типа «Кречет-94» или конструктивно близкий «Орлан». Исходя из конфигурации упомянутых скафандров, очевидно, что положение «сидя» неприемлемо, так как наспинный ранец и присоединенный к нему контейнер с оборудованием расположены таким образом, что блокируют ту часть тела человека, на которую обычно садятся (И.П. Абрамов и др. Космические скафандры России. ОАО НП «Звезда». Москва. 2005. С. 118-159).
Известна система амортизации и фиксации (САФ) космонавта в полужестком скафандре, реализованная на отечественном лунном корабле (ЛК). Управление процессом прилунения выполнимо при обзоре нижней полусферы, т.е. смотреть нужно вперед-вниз, что осуществимо только из положения «стоя». САФ представляла собой шарнирно-стержневую структуру, охватывающую часть скафандра от пояса до ботинок (В.М. Филин. Притяжение Луны. Москва. Лотос.2005. С. 40, 53), которая позволяла выполнить только наклон вперед из вертикального положения и обратно на 15°. САФ лунного корабля по своим жесткостным характеристикам избыточна для фиксации оператора на посту управления инженерной луномашины.
Известна проблема поддержания устойчивости тела космонавта относительно вертикали в условиях лунной гипогравитации. Сущность задачи удержания равновесия человека в положении «стоя» заключается в приведении проекции центра тяжести тела на поверхность опоры, определяемую площадью стоп и поверхностью между ними, откуда следует, что стопы должны занимать определенное положение (О.С. Цыганков. Луна в ракурсе человеческого фактора. Полет 11. 2007. С. 16 - 23).
Площадка с элементами фиксации ботинок определяющая положение стоп, систематически используется в космической технике. Отсутствие подвижных частей, пружин, защелок объясняет ее надежность, безотказность и эргономичность (О.С. Цыганков. Трудовая деятельность в безопорном пространстве. Полет 3. 2002. С. 3-12).
В отличие от условий микрогравитации, при 0,16g целесообразно снижать нагрузка от веса скафандра на космонавта, перекладывая ее, хотя бы частично, на конструкцию создаваемого объекта.
Задачей группы изобретений является создание инженерной машины, обеспечивающей продуктивность и безопасность деятельности космонавтов, облаченных в полужесткие скафандры, по технической разработке грунтов на поверхности Луны.
Техническим результатом группы изобретений является обеспечение продуктивной и безопасной деятельности космонавтов в полужестких скафандрах по технической разработке грунтов на поверхности Луны.
Технический результат изобретения достигается тем, что инженерная луномашина, содержащая несущий ферменный каркас, ходовую часть, пульт и блоки управления, оборудование строительно-землеройного назначения, отличающаяся тем, что в нее введены гусенично-колесные модули с возможностью трансформирования их в колесные движители, настил, при этом оборудование строительно-землеройного назначения выполнено встроенным в ферменный каркас так, что на одной его оконечности встроена стрела с экскаваторным ковшом и бульдозерный отвал, на другой - рыхлитель, стойки с поручнями и автономные портативные пульты для непосредственного и дистанционного управления, площадки фиксации со средствами закрепления ботинок скафандра, полужесткий упор под ранец скафандра космонавта, узел фиксации и амортизации космонавта в полужестком скафандре под избыточным давлением в положении «стоя», состоящий из магнитного фиксатора, выполненного в виде кольцевого магнита, винтовой пружины, прикрепленной одной оконечностью к стойке, другой - к сферическому ярму посредством резьбовых втулок, причем пружина помещена в тканевый чехол, закрепленный на концах бандажами, а приемное гнездо с кольцевым магнитом установлено на поясном силовом шпангоуте полужесткого скафандра, в каркас встроены боксы для аккумуляторной батареи, приборов управления, связи, средств оказания помощи и вспомогательных инструментов.
Технический результат изобретения достигается тем, что способ эксплуатации инженерной луномашины заключается в том, что космонавты, в полужестких скафандрах занимают рабочие места на луномашине, устанавливают автономные пульты управления на стойках в зависимости от производственных задач, закрепляют ботинки скафандров на площадках, стыкуют к скафандрам узлы фиксации; при необходимости космонавт освобождается от закрепления ботинок скафандра, с портативным пультом переходит на грунт и управляет процессом разработки грунтов: очистку и планирование площадки производят с использованием бульдозерного отвала при движении машины; рыхление осуществляют использованием тягового усилия машины; копание экскаватором типа «обратная лопата» осуществляют движением ковша вниз в направлении к машине; стрелу с ковшом используют в качестве подъемного крана-манипулятора.
Предлагаемые технические решения обоснованы следующим образом.
1. Комплект встроенных агрегатов для грунторазработки обеспечивает выполнение задач, представимых для начального этапа разворачивания лунной базовой станции, исключает необходимость перемонтажа, замены агрегатов в условиях открытого космоса.
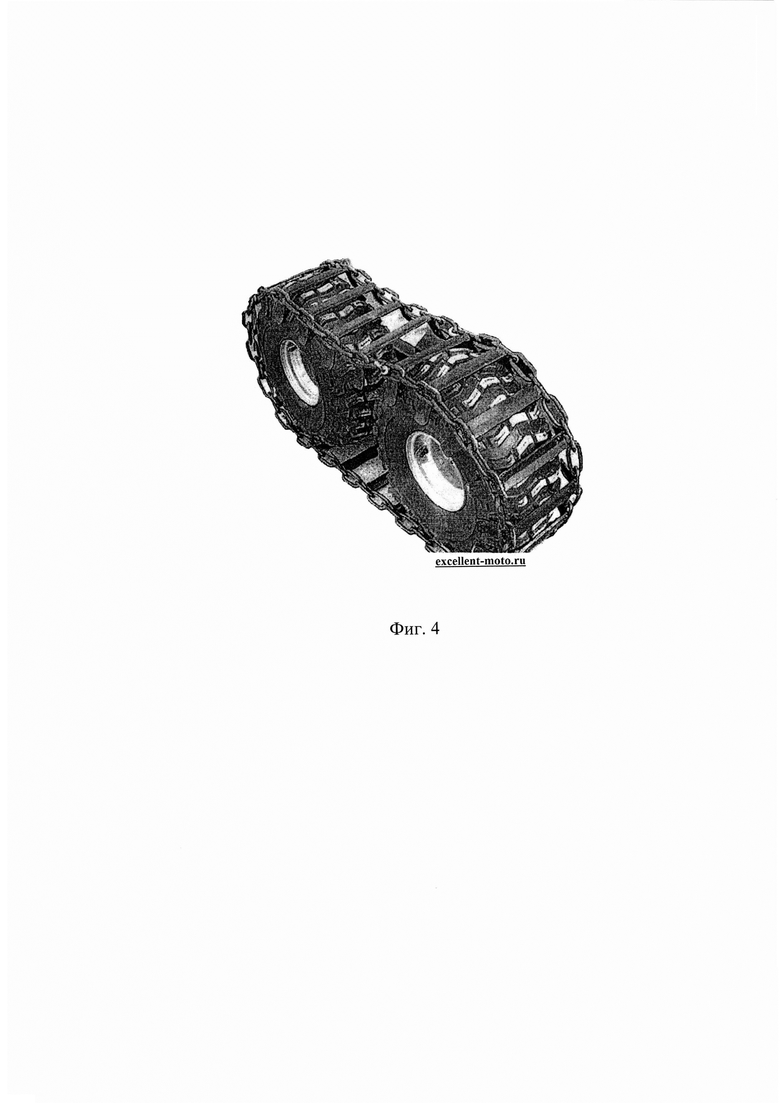
2. Гусенично-колесные модульные движители (http://epizodyspace.ru/bibl/ziv/1991/5/planetoh.html) обладают положительными свойствами гусеничных и колесных движителей, отличаются большими контактом с грунтом, являются предпочтительными при строительных, грунторазделочных работах, обладают высокой опорной и профильной проходимостью и устойчивостью. Такие движители высоконадежны и ремонтопригодны. Ведущим в модуле является одно мотор-колесо. В предлагаемом варианте гусеничная цепь состоит из кованых звеньев, обладающих высокой прочностью и износостойкостью, к которым крепятся траки-грунтозацепы (excellent-moto.ru). В цепь включается до 4-х разъемных звеньев, что позволяет заменять в цепи отдельные участки. Гусенично-колесные модули, при необходимости могут быть трансформированы в колесные движители.
3. Управление инженерной луномашиной космонавтом в скафандре расширяет возможности ее эксплуатации, повышает оперативность применения, позволяет космонавту совмещать разные виды трудовой деятельности в течение рабочей смены (например, выполнить дополнительную разметку поверхности); несоизмеримое повышение надежности и безотказности в сравнении с гермокабиной; исключение катастрофической опасности при отказе ходовой части.
4. Узел и площадка фиксации обеспечивают надежное и достаточно гибкое закрепление космонавта в естественном для полужесткого скафандра положении «стоя», созданы условия для быстродействия при фиксации/расфиксации, высвобождаются руки для других манипуляций.
5. Предусмотрен упор, на который космонавт может опереть ранец скафандра и частично снизить нагрузку от его веса.
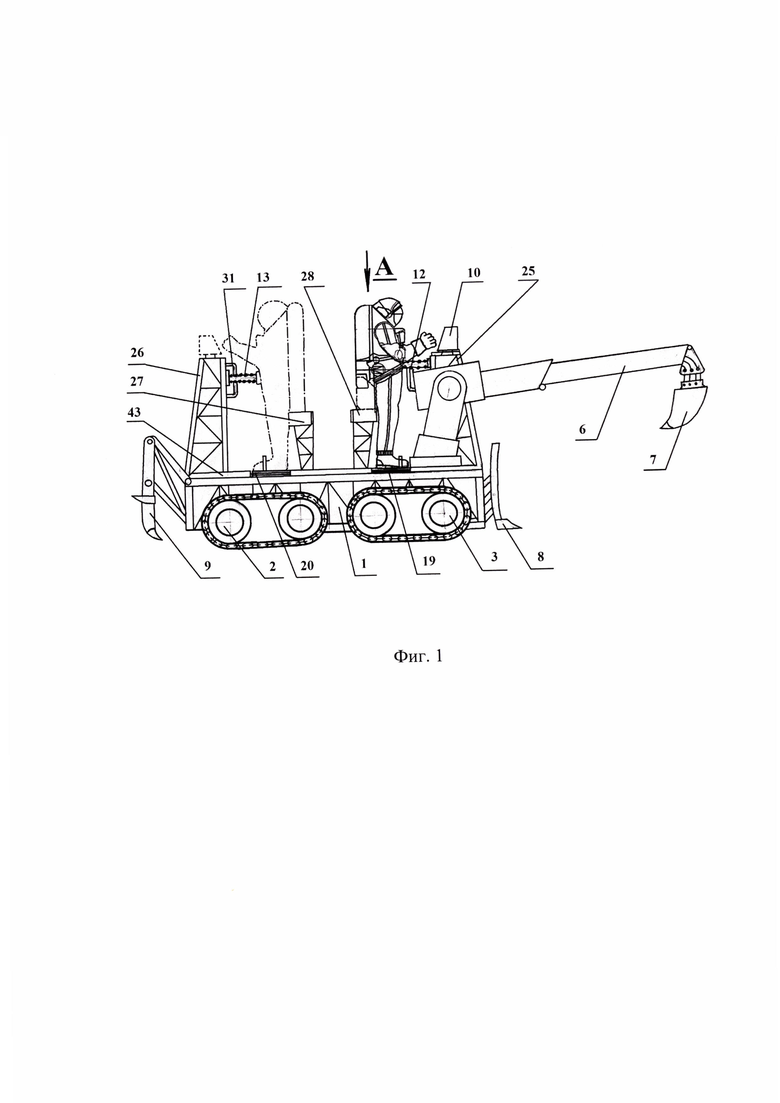
Устройство инженерной луномашины показано на фигурах 1-4:
На фигуре 1 - конструктивно-компоновочная схема.
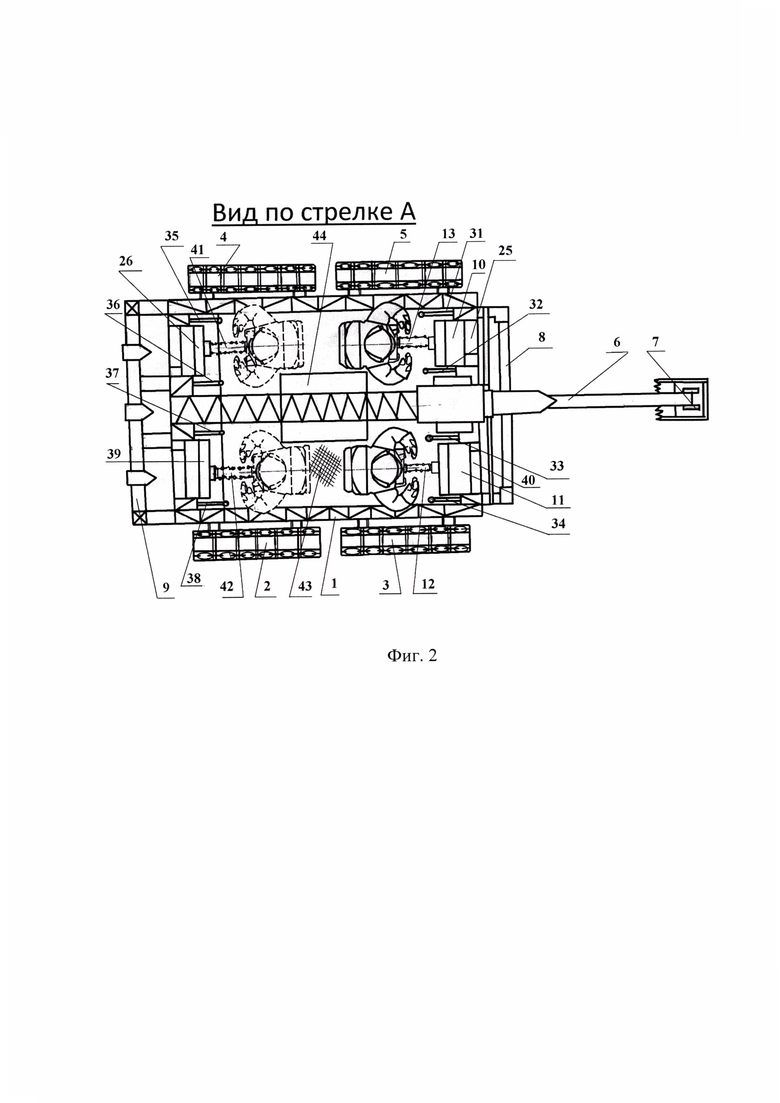
На фигуре 2 - вид по стрелке А.
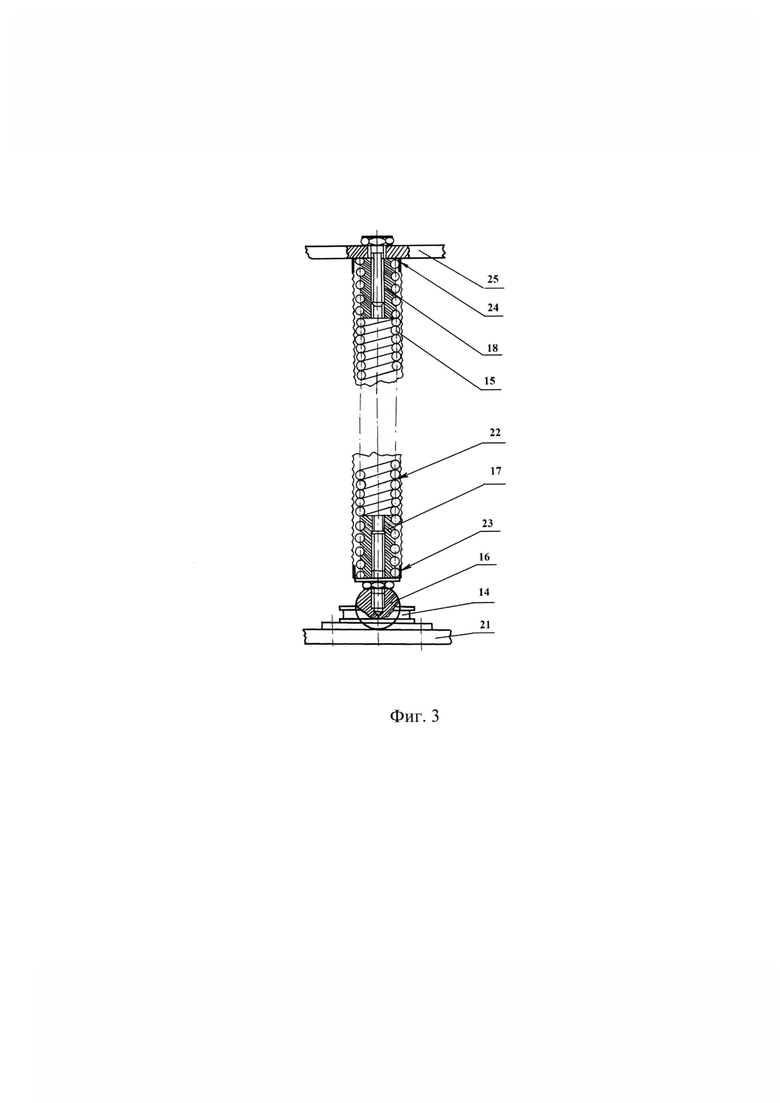
На фигуре 3 - узел фиксации и амортизации.
На фигуре 4 - гусенично-колесный модуль (excellent-moto.ru).
Обозначения на фигурах:
1 - ферменный каркас
2, 3, 4, 5 - гусенично-колесный модуль
6 - стрела
7 - экскаваторный ковш
8 - бульдозерный отвал
9 - рыхлитель 10, 11 - пульт
12, 13, 41, 42 - узел фиксации и амортизации
14 -кольцевой магнит;
15 - винтовая пружина
16 - ярмо
17, 18 - резьбовая втулка
19, 20 - площадка фиксации ботинок
21 - силовой шпангоут
22 - чехол
23, 24 - бандажи
25, 26, 39, 40 - стойка
27, 28, 29, 30 - упор под ранец скафандра
31, 32, 33, 34, 35, 36, 37, 38 - поручень
43 - настил
44 - аккумуляторно-приборный бокс.
Инженерная луномашина включает в себя несущий ферменный каркас 1 (фиг 1, 2), выполненный из трубчатых стержней и распорок (например, труба катанная 25×1, АМг-2 ОСТ1 92002-83); ходовую часть, пульт и блоки управления, оборудование строительно-землеройного назначения, при этом в нее введены гусенично-колесные модули 2, 3, 4, 5 (фиг.4; excellent-moto.ru), с возможностью трансформирования в колесные движители, настил 43 (например, рифленый алюминиевый лист 1, 5 АМг-5 ГОСТ 21631-76), оборудование строительно-землеройного назначения выполнено встроенным в ферменный каркас 1 так, что на одной его оконечности встроена стрела 6 с экскаваторным ковшом 7 (Новый политехнический словарь. Главный редактор А.Ю. Ишлинский. Москва. Научное издательство «Большая Российская энциклопедия. 2000. С. 336) и бульдозерный отвал 8 (Большая Советская энциклопедия. Москва. Издательство Советская энциклопедия. Главный редактор A.M. Прохоров. 1971 г.; Т. 4; С. 107); на другой оконечности - рыхлитель 9 (БСЭ. Т. 22; С. 455), стойки 25, 26, 39, 40 с поручнями 31 - 38 и автономные портативные пульты управления 10, 11 для непосредственного и дистанционного управления, площадки фиксации со средствами закрепления ботинок скафандра 19, 20 космонавта (О.С.Цыганков. Трудовая деятельность в безопорном пространстве. Полет 3. 2012. С. 3-12); полужесткий упор под ранец скафандра 27, 28, 29, 30 (фенолоформальдегидный пенопласт ФФ-20 СТУ 14/07-419-63); узел фиксации и амортизации 12, 13, 41, 42 (фиг. 3) космонавта в полужестком скафандре под избыточным давлением в положении "стоя", состоящий из магнитного фиксатора, выполненного в виде кольцевого магнита 14 (О.С. Цыганков. Магнит в невесомости. Полет 1. 2010. С. 30-35), винтовой пружины 15 (например, проволока 2-Т-12Х18Н10Т, ГОСТ 18143-72), прикрепленный одной оконечностью к стойке 25, 26, 39, 40, другой оконечностью - к сферическому ярму 16 посредством резьбовых втулок 17, 18 (htt:/mash/XXLinfo/546872), причем пружина 15 помещена в тканевый чехол 22 (например, ткань ТТА-2, артикул 86165-04, ТУ 8288-039-172778575-2015), закрепленный на концах бандажами 23, 24 (нитки швейные полиамидные, ТУ 8147-016-0513 8074-0104), а приемное гнездо с кольцевым магнитом 14 установлено на поясном силовом шпангоуте полужесткого скафандра 21 (Абрамов И.П. Космические скафандры России. ОАО НПО "Звезда". Москва. 2005. С. 123), в каркас 1 встроены боксы 44 для аккумуляторной батареи, приборов управления, связи, средств оказания первой помощи и вспомогательных инструментов.
Способ эксплуатации инженерной луномашины заключается в том, что космонавты в полужестких скафандрах занимают рабочие места на луномашине, устанавливают автономные пульты управления 10, 11 на стойках 25, 26, 39, 40 в зависимости от производственных задач, закрепляют ботинки скафандров на площадках 19, 20, стыкуют к скафандрам узлы фиксации 12, 13, 41, 42; при необходимости космонавт, освобождается от закрепления ботинок скафандра 19, 20, с портативным пультом 10, 11 переходит на грунт, управляет процессом разработки грунтов: очистку и планирование площадки производят с использованием бульдозерного отвала 8 при движении машины; рыхление осуществляют рыхлителем 9 за счет тягового усилия машины; копание экскаватором типа «обратная лопата» осуществляют движением ковша 7 вниз в направлении к машине; стрелу 6 с ковшом 7 используют в качестве подъемного крана-манипулятора, например, для удаления крупных камней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный модуль поддержки внекабинной деятельности космонавтов на поверхности Луны и способ его эксплуатации | 2021 |
|
RU2770328C1 |
| УНИВЕРСАЛЬНЫЙ ТРАКТОР | 1992 |
|
RU2045465C1 |
| Шлем космического скафандра | 2023 |
|
RU2811479C1 |
| КОЛЕСНАЯ ЗЕМЛЕРОЙНАЯ МАШИНА | 2019 |
|
RU2740970C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР-ПОГРУЗЧИК | 1993 |
|
RU2072017C1 |
| БРОНИРОВАННАЯ ИНЖЕНЕРНАЯ ДОРОЖНАЯ МАШИНА | 2010 |
|
RU2440547C1 |
| ТРАНШЕЙНАЯ ГУСЕНИЧНАЯ МАШИНА | 1998 |
|
RU2148126C1 |
| КОТЛОВАННАЯ МАШИНА | 2011 |
|
RU2485253C1 |
| КОЛЕСНЫЙ БУЛЬДОЗЕР | 1993 |
|
RU2057853C1 |
| МАШИНА ДЛЯ ЭКСКАВАЦИИ И ПЕРЕМЕЩЕНИЯ ГРУНТА | 1992 |
|
RU2038446C1 |
Группа изобретений относится к инженерным машинам, предназначенным для эксплуатации в природных условиях Луны и других небесных тел, имеющих твердую поверхность. Инженерная луномашина содержит несущий ферменный каркас, ходовую часть, пульт и блоки управления, оборудование строительно-землеройного назначения, гусенично-колесные модули с возможностью трансформирования их в колесные движители и настил. Оборудование встроено в ферменный каркас так, что на одной его оконечности встроена стрела с экскаваторным ковшом и бульдозерный отвал, на другой – рыхлитель, стойки с поручнями и автономные портативные пульты, площадки фиксации со средствами закрепления ботинок скафандра, полужесткий упор под ранец скафандра космонавта, узел фиксации и амортизации космонавта в полужестком скафандре. Достигается создание моноблочной многофункциональной инженерной машины с встроенными агрегатами грунторазработки. 2 н.п. ф-лы, 4 ил.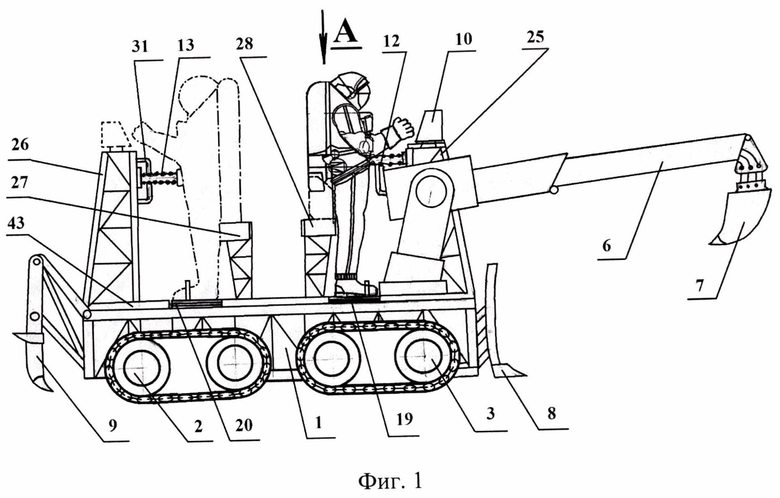
1. Инженерная луномашина, содержащая несущий ферменный каркас, ходовую часть, пульт и блоки управления, оборудование строительно-землеройного назначения, отличающаяся тем, что в нее введены гусенично-колесные модули с возможностью трансформирования их в колесные движители, настил, при этом оборудование строительно-землеройного назначения выполнено встроенным в ферменный каркас так, что на одной его оконечности встроена стрела с экскаваторным ковшом и бульдозерный отвал, на другой - рыхлитель, стойки с поручнями и автономные портативные пульты для непосредственного и дистанционного управления, площадки фиксации со средствами закрепления ботинок скафандра, полужесткий упор под ранец скафандра космонавта, узел фиксации и амортизации космонавта в полужестком скафандре под избыточным давлением в положении «стоя», состоящий из магнитного фиксатора, выполненного в виде кольцевого магнита, винтовой пружины, прикрепленной одной оконечностью к стойке, другой - к сферическому ярму посредством резьбовых втулок, причем пружина помещена в тканевый чехол, закрепленный на концах бандажами, а приемное гнездо с кольцевым магнитом установлено на поясном силовом шпангоуте полужесткого скафандра, в каркас встроены боксы для аккумуляторной батареи, приборов управления, связи, средств оказания помощи и вспомогательных инструментов.
2. Способ эксплуатации инженерной луномашины, заключающийся в том, что космонавты в полужестких скафандрах занимают рабочие места на луномашине, устанавливают автономные пульты управления на стойках в зависимости от производственных задач, закрепляют ботинки скафандров на площадках, стыкуют к скафандрам узлы фиксации; при необходимости космонавт освобождается от закрепления ботинок скафандра, с портативным пультом переходит на грунт и управляет процессом разработки грунтов: очистку и планирование площадки производят с использованием бульдозерного отвала при движении машины; рыхление осуществляют использованием тягового усилия машины; копание экскаватором типа «обратная лопата» осуществляют движением ковша вниз в направлении к машине; стрелу с ковшом используют в качестве подъемного крана-манипулятора.
| Система обеспечения внекабинной деятельности космонавтов-операторов и способ её эксплуатации | 2020 |
|
RU2739648C1 |
| US 5697108 A1, 16.12.1997 | |||
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| JP 2001080596 A, 27.03.2001. | |||

